8材料成型原理 增量200701109
材料成型原理 名词解释
滑移线场:当方形压头加载于均质、各向同性的塑性材料(土壤)时,最大剪应力轨迹在材料中的空间分布称为滑移线场。
滑移线场实际上就是一个剪切构造网络真实应力:拉伸(或压缩)试验时,变形力与当时实际截面积(而不是初始截面积)之比。
其数值是随变形量、温度与应变速率而变化的。
理想塑性:材料在常应力并不显示加工硬化,而只做塑性流动应力球张量:由一点处三个线应变(见应变)的平均应变所组成的应变张量。
金属充型能力:液态金属充满铸型型腔,获得尺寸精确、轮廓清晰的成型件的能力。
金属材料的焊接性:—定焊接技术条件下,获得优质焊接接头的难易程度,即金属材料对焊接加工的适应性称为金属材料的焊接性平衡凝固:指凝固过程中的每个阶段都能达到平衡,即在相变过程中有充分时间进行组元间的扩散,以达到平衡相的成分。
偏析:合金中各组成元素在结晶时分布不均匀的现象称为偏析滑移线:在塑性力学中,变形体塑变区最大切应力的迹线。
冷变形:在再结晶温度以下(通常是指室温)的变形。
热变形:在再结晶温度以上的变形。
温变形:在再结晶温度以下,高于室温的变形熔渣的碱度焊接熔渣中碱性氧化物质量分数的总和与酸性氧化物质量分数总和的比值,叫焊接熔渣的碱度焊接热循环:在焊接热源作用下,焊件上某点的温度随时间变化的过程。
简单加载:加载过程中各应力分量按同一比例单调增长,应力主轴方向固定不变应力偏张量:应力偏张量是塑性变形时物体内一点的应力张量的分量随坐标变化而改变,但其应力张量不变量却是固定不变的,因此应力张量不变量可以反映物体变形状态的实质。
溶质再分配系数:凝固过程中固-液界面固相侧溶质质量分数与液相中溶质质量分数之比,称为溶质再分配系数。
焊接热影响区:在焊接热循环作用下,焊缝两侧处于固态的母材发生明显的组织和性能变化的区域,称为焊接热影响区。
最小阻力定律:塑性变形体内有可能沿不同方向流动的质点只选择阻力最小方向流动的规律。
超塑性:是指材料在一定的内部条件和外部条件下,呈现出异常低的流变抗力、异常高的流变性能的现象。
【免费下载】材料成型原理第三章答案

第三章1.试述等压时物质自由能G 随温度上升而下降以及液相自由能G L 随温度上升而下降的斜率大于固相G S 的斜率的理由。
并结合图3-1及式(3-6)说明过冷度ΔT 是影响凝固相变驱动力ΔG 的决定因素。
答:(1)等压时物质自由能G 随温度上升而下降的理由如下:由麦克斯韦尔关系式:(1)VdP SdT dG +-=并根据数学上的全微分关系: dy yF dx x F y x dF xy ⎪⎪⎭⎫⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂=),(得:(2)dP P G dT T G dG TP ⎪⎭⎫⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂=比较(1)式和(2)式得: V P G S T G TP=⎪⎭⎫⎝⎛∂∂-=⎪⎭⎫⎝⎛∂∂,等压时dP =0 ,此时 (3)dT T G SdT dG P⎪⎭⎫⎝⎛∂∂=-=由于熵恒为正值,故物质自由能G 随温度上升而下降。
(2)液相自由能G L 随温度上升而下降的斜率大于固相G S 的斜率的理由如下: 因为液态熵大于固态熵,即: S L > S S 所以:>即液相自由能G L 随温度上升而下降的斜率大于固相G S 的斜率 。
(3)过冷度ΔT 是影响凝固相变驱动 力ΔG 的决定因素的理由如下: 右图即为图3-1其中:表示液-固体积自由能之差V G ∆T m 表示液-固平衡凝固点从图中可以看出:T > T m 时,ΔG=Gs-G L ﹥0,此时 固相→液相T = T m 时,ΔG=Gs-G L =0,此时 液固平衡 T < T m 时,ΔG=Gs-G L <0,此时 液相→固相 所以ΔG 即为相变驱动力。
再结合(3-6)式来看,m m V T TH G ∆⋅∆-=∆(其中:ΔH m —熔化潜热, ΔT —过冷度))(T T m -=由于对某一特定金属或合金而言,T m 及ΔH m 均为定值,所以过冷度ΔT 是影响凝固相变驱动力ΔG 的决定因素 。
2.怎样理解溶质平衡分配系数K 0的物理意义及热力学意义?答:(1)K 0的物理意义如下:溶质平衡分配系数K 0定义为:特定温度T *下固相合金成分浓度C 与液相合金成分浓度*S C 达到平衡时的比值:*L K 0 =**LSC C K 0<1时,固相线、液相线构成的张角朝下,K 0越小,固相线、液相线张开程度越大,开始结晶时与终了结晶时的固相成分差别越大,最终凝固组织的成分偏析越严重。
材料成型原理 :第5章 凝固成型

铸造缺陷
充型能力不足 浇不足 冷 隔 夹 砂 气 孔 夹 渣
影响因素
合金的流动性 铸型性质 浇注条件 铸件结构等
凝固成型
液态金属的冷却收缩与凝固缺陷 铸件凝固温度场 铸造应力 凝固控制
Te=0℃
• 冷却过程无相变,无机械阻碍
• 弹塑性转变临界温度为Tk
• I、II间无热交换
I
II
热应力形成机理图解 “厚拉薄压”原则TTiTI TIII
II
Tk
I II III 0 0 1 2 l
塑性状态 弹性状态
3
l3=1
实际长度
I II III I II
0
(2) 相变应力的形成:
相变应力可以是临时应力,也可以是残留应力。 有残留相变应力时,应力方向与热应力方向相反。
改善铸型和型芯的退让性
消除铸造残余应力的方法:
自然时效:
将铸件露天长时间放置,促使应力松弛的方 法。优点是成本低,缺点是生产周期长,占 地面积大,消除应力不彻底
人工时效:
将铸件加热到合金弹性状态的温度范围,保 温一定时间后,缓慢冷却,使残余应力消除 的方法
凝固成型
液态金属的冷却收缩与凝固缺陷 铸件凝固温度场 铸造应力 凝固控制
erf
2
x at
2
x
2 at e 2 d
0
• 代入铸件(型)的边界条件得:
铸件侧
T1
Ti
T10
Ti
erf
2
x a1t
铸型侧
铸型侧
T2
Ti
Ti
绪论材料成型原理ytzhang
27
材料成型原理-液态成形理论基础 ytzhang@
一重铸钢支承辊
28
材料成型原理-液态成形理论基础 ytzhang@
生产应用
金属所研发的大型铸钢支承辊在太钢不锈钢生产线上应用
材料成型原理-液态成形理论基础 ytzhang@
液态成形(铸造)
作业
1. 什么是液态成形(铸造) 2. 影响液态金属凝固过程的因素主要有哪些?
31
材料成型原理-液态成形理论基础 ytzhang@
3. 液态合金的结构和性质、冶金处理(如孕育处理、变质处理、
微合金化等)及外力(如电磁力、重力、机械力等)的作用,
对液态金属的凝固也有重要影响,如影响凝固组织、形貌、相
组成等。
16
材料成型原理-液态成形理论基础 ytzhang@
液态金属凝固学的发展
凝固过程的理论研究大体上经历了三个阶段:
材料成型原理-液态成形理论基础 ytzhang@
充型过程模拟
缩 孔
材料成型原理-液态成形理论基础 ytzhang@
温度场模拟
3625s
9013s
16237s
time
26
材料成型原理-液态成形理论基础 ytzhang@
一重铸钢支承辊的浇注过程
• 以经典凝固理论为指导,通过大量的实践研究,实现了凝 固组织和凝固过程的优化和控制,使得大型铸钢锭及铸件 的冶金质量得到很大提高。
• 出现了快速凝固、定向凝固、半固态铸造等先进的凝固技 术和材料成形方法。
18
材料成型原理-液态成形理论基础 ytzhang@
第三阶段:20世纪80年代~现在,凝固过程的理论研究进入 了新的时期。表现在:
sziialal3ni共晶合金宏观形貌凝固终a10mm空间材料成型原理液态成形理论基础ytzhangimraccn终端b10mm地面空间样品表面光洁内部均匀致密无明显缺陷地面样品表面粗糙和微小孔洞内部存在尺寸较大的气孔空间样品表面光洁内部均匀致密无明显缺陷地面样品表面粗糙和微小孔洞内部存在尺寸较大的气孔首先采用计算机模拟软件和现代铸造理论模拟铸件充型凝固过程以及锻件的锻造过程采用计算机模拟软件和现代铸造理论模拟铸件充型凝固过程以及锻件的锻造过程其次用x射线实时观察和监测浇注过程实时观察数值模拟可视化铸造技术材料成型原理液态成形理论基础ytzhangimraccn其次用x射线实时观察和监测浇注过程第三通过实际铸锻件生产并与模拟监测结果对比确定最佳的生产工艺通过实际铸锻件生产并与模拟监测结果对比确定最佳的生产工艺最后按工件形成软件包软件包企业试制软件包企业试制x射线实时观察和监测材料成型原理液态成形理论基础ytzhangimraccnrealtimexrayradiographyx射线实时监测系统计算机模拟40cr4铸钢支承辊新概念设计浇注系统?一重支承辊直径为1435mm高7m钢水重50吨?鞍重支承辊直径为1620mm高769m钢水重65吨材料成型原理液态成形理论基础ytzhangimraccn采用了平稳充型随流式浇注系统及计算机模拟技术全套工艺图纸
合工大版《材料成型原理》课程学习笔记
焊接冶金学1.★熔合比(dilution) 的影响焊缝金属中局部熔化的母材所占的比例称为熔合比。
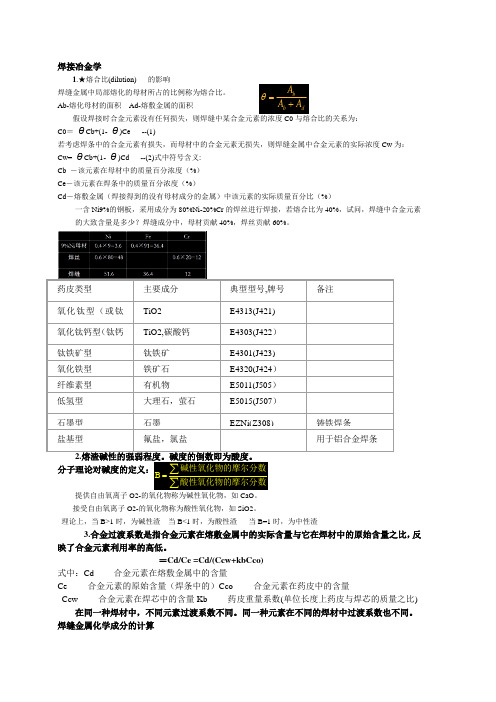
Ab-熔化母材的面积Ad-熔敷金属的面积C0=θCb+(1- θ)Ce --(1)若考虑焊条中的合金元素有损失,而母材中的合金元素无损失,则焊缝金属中合金元素的实际浓度Cw为:Cw= θCb+(1- θ)Cd --(2)式中符号含义:Cb -该元素在母材中的质量百分浓度(%)Ce-该元素在焊条中的质量百分浓度(%)Cd-熔敷金属(焊接得到的没有母材成分的金属)中该元素的实际质量百分比(%)一含Ni9%的钢板,采用成分为80%Ni-20%Cr的焊丝进行焊接,若熔合比为40%,试问,焊缝中合金元素的大致含量是多少?焊缝成分中,母材贡献40%,焊丝贡献60%。
熔渣碱性的强弱程度。
碱度的倒数即为酸度。
分子理论对碱度的定义:提供自由氧离子O2-接受自由氧离子O2-的氧化物称为酸性氧化物,如SiO2。
理论上,当B>1时,为碱性渣当B<1时,为酸性渣当B=1时,为中性渣3.合金过渡系数是指合金元素在熔敷金属中的实际含量与它在焊材中的原始含量之比,反映了合金元素利用率的高低。
=Cd/Ce =Cd/(Ccw+kbCco)式中:Cd ------合金元素在熔敷金属中的含量Ce-------合金元素的原始含量(焊条中的)Cco-------合金元素在药皮中的含量Ccw-------合金元素在焊芯中的含量Kb-------药皮重量系数(单位长度上药皮与焊芯的质量之比) 在同一种焊材中,不同元素过渡系数不同。
同一种元素在不同的焊材中过渡系数也不同。
焊缝金属化学成分的计算药皮类型主要成分典型型号,牌号备注氧化钛型(或钛型)TiO2 E4313(J421)氧化钛钙型(钛钙型)TiO2,碳酸钙E4303(J422)钛铁矿型钛铁矿E4301(J423)氧化铁型铁矿石E4320(J424)纤维素型有机物E5011(J505)低氢型大理石,萤石E5015(J507)石墨型石墨EZNi(Z308) 铸铁焊条盐基型氟盐,氯盐用于铝合金焊条B=∑∑碱性氧化物的摩尔分数酸性氧化物的摩尔分数bb dAA Aθ=+η=Cd/Ce =Cd/(Ccw+kbCco) Cw= θCb+(1- θ)Cd已知η, Ccw ,kb ,Cco 可求出 Cw 。
金属塑性成型原理课件(第八章)
结论:速度间断线上消耗的虚功率影响虚功方程。
Ti ui ds ij' ij dV k V t dsD
s SD
§8.3
上限法原理
一、最大散逸功原理:在一切许可的塑性应变增量(应变速度) 或许可的应力状态中,以符合增量理论关系的应力状态或塑性 应变增量(应变速度)所耗塑性应变功耗(或功率消耗)最大。
求解的基本步骤
根据变形的具体情况,或参照该问题的滑移线场,确定变 形区的几何位置与形状,再根据金属流动的大体趋势,将 变形区划分为若干个刚性三角形块; 根据变形区划分刚性三角形块情况,以及速度边界条件, 绘制速端图;
根据所作几何图形,计算各刚性三角形边长及速端图计算
各刚性块之间的速度间断量,然后计算其剪切功率消耗; 求问题的最佳上限解,一般划分的刚性三角形块时,几何 形状上包含若干个待定几何参数,所以须对待定参数求其 极值,确定待定参数的具体数值以及最佳的上限解。
上限法中虚拟的运动学许可速度场模式有三种: (1)Johnson模式,通常称为简化滑移线场的刚性三角形上限
模式,主要适用于平面应变问题。
(2)Avitzur模式,通常称为连续速度场的上限模式,它既可 适用平面应变问题、轴对称问题,也可用于某些三维问题,用 途比较广泛。 (3)上限单元技术(UBET),目前比较实用的是圆柱坐标系的
§8.1
动可容速度场
i 动可容速度场 u(位移场 u i )满足的条件:
1)满足速度(或位移)的边界条件,即在位移面上,
ui ui
ui ui
2)变形体内保持连续,不发生重叠和开裂;
3)满足体积不变条件,即 ii 0 ii 0
材料成形原理--固态成形部分
机械学院--固态成形部分《材料成形原理》习题解(1)绪论1、什么是金属的塑性?什么是塑性成形?塑性成形有何特点?答:在外力的作用下使金属材料发生永久的塑性变形而不破坏其完整性的能力称为金属的塑性。
金属材料在一定的外力作用下,利用其塑性而使其成形并获得一定力学性能的加工方法称为塑性成形。
塑性成形的特点是(1)组织、性能好;(2)材料利用率高;(3)如在模具中成型,尺寸精度高,生产效率高。
第六章1、如何完整的表示受力物体内任一点的应力状态?原因何在?答:为了完整的表示受力物体内任一点的应力状态,围绕该点切取一平行于坐标轴的六面体作应力单元体,用三个微分面上的应力来完整的描述该点的应力状态。
在一般情况下表示一点的应力状态须用九个应力分量来描述,由切应力互等定理,只须用六个应力分量来描述,如果以主轴作坐标系,一点的应力状态只须用三个应力分量来描述。
应力单元体,应力张量,应力莫尔圆,应力椭球面都是点的应力状态的表达方法。
2、叙述下列术语的定义或含义:张量:张量是矢量的推广,可以定义由若干个当坐标系改变时满足转换关系的分量所组成的集合为张量应力张量:在一定的外力条件下,受力物体内任一点的应力状态已被确定,如果取不同的坐标系,表示该点的应力状态的九个应力分量将有不同的数值,而该点的应力状态并没有变化,因此,在不同坐标系中的应力分量之间应该存在一定的关系。
符合数学上张量之定义,表示该点的应力状态的九个应力分量构成一个二阶张量,称为应力张量。
应力张量不变量:应力状态特征方程式中的系数J1、、J2、J3、不随坐标而变,所以将J1、、J2、J3、称为应力张量的第一、第二、第三不变量。
主应力:切应力为零的微分面称为主平面,主平面上的正应力称为主应力。
主切应力:切应力达极大值的微分面称为主切应力平面,主切应力平面上的切应力称为主切应力。
最大切应力:三个主切应力中绝对值最大的一个。
主应力简图:只用主应力的个数及符号来描述一点应力状态的简图。
《材料成型原理》.
7.3
(一)汉基第一定理 在同一族的两条滑移线(例如α1和 α2线)与另一族的任一条滑移线( β1或 β2线)的两个交点上,其切线夹角 与 平均应力的变化均保持常数。 在图6-4中,由α族的α1转到α2时, 则沿β族的β1 、β2 ,有 Δ ω =ω2,1 -ω1,1=ω2,2 -ω1,2 =…=常数 Δ σቤተ መጻሕፍቲ ባይዱ=σm2,1 -σm1,1=σm2,2 -σm1,2=…=常 数
x xy 0 x y y xy 0 y x
m 2K cos 2 sin 2 0 x x y m 2K sin 2 cos 2 0 y x y
m 2K 1 S
m 2 K 2 S
7.2 汉基(Hencky)应力方程
如果以上两式分别沿滑移线积分,则
1 S 常数
沿线积分 沿线积分
2 S 常数
则汉基(Hencky)应力方程
m 2K m 2K
X轴和y轴设在滑移线上,则:
0, dx dS , dy dS
, x S y S
7.2 汉基(Hencky)应力方程
m 2K 0 S S m 2K 0 S S
m 2K 0 S m 2K 0 S
汉基积分或汉基方程为: m 2 K (沿α线) m 2 K (沿β线) 汉当沿α族(或β族)中同一条滑移线移动时,任意函数ξ(或 η)为常数,只有从一条滑移线转到另一条时, ξ(或η)值才 变。由汉基积分可以推出,沿同一滑移线上平均应力的变化, 与滑移线的转角成正比,比例常数为2K。 即为: a bb沿滑移线的转角,而 ma 表示从点 mb 2K - ωb) a 过渡到点 即式中 (ωa σma- σmb表示相应点间平均应力的变化。此式指出了滑移线 上平均应力的变化规律。当滑移线的转角愈大时,平均应力的 变化愈大。若滑移线为直线,即转角为零,则各点的 平均应力相等。
材料成型原理第十二章答案
第十二章习题12-1 叙述下列术语的定义:简单变形、增量理论、全量理论。
答:简单变形:在比例加载时,应力主轴的方向将固定不变,由于应变增量主轴与应力主轴重合,所以应变增量主轴也将固定不变,这种变形称为简单变形。
增量理论:又称流动理论,是描述材料处于塑性状态时,应力与应变增量或应变速率之间关系的理论,它是针对加载过程的每一瞬间的应力状态所确定的该瞬间的应变增量,这样就撇开加载历史的影响。
全量理论:在小变形的简单加载过程中,应力主轴保持不变,由于各瞬间应变增量主轴和应力主轴重合,所以应变主轴也将保持不变。
在这种情况下,对应变增量积分便得到全量应变。
在这种情况下建立塑性变形的全量应变与应力之间的关系称为全量理论,亦称为形变理论。
12-2 塑性变形时应力-应变关系有何特点,为什么说塑性变形时应力和应变之间关系与加载历史有关?答:塑性应力与应变关系有如下特点:(1)塑性变形不可恢复,是不可逆的关系,与应变历史有关,即应力与应变关系不再保持单值关系。
(2)塑性变形时,认为体积不变,即应变球张量为零,泊松比ν=0.5。
(3)应力应变之间关系是非线性关系,因此,全量应变主轴与应力主轴不一定重合。
(4)对于硬化材料,卸载后再重新加载,其屈服应力就是卸载后的屈服应力,比初始屈服应力要高。
正因为塑性变形是不可逆的,应力与应变关系不是单值对应的,与应变历史有关,而且全量应变主轴与应力主轴不一定重合,因此说应力与应变之间的关系与加载历史有关,离开加载路线来建立应力与全量应变之间的关系是不可能的。
12-3 真实应力-应变曲线有哪几种,常用的是哪一种,有什么特点?答:①真实应力与相对线应变组成的S ε-曲线;②真实应力与相对断面收缩率组成的S ψ-曲线;③真实应力与对数应变(也叫真实应变)组成的S -Є曲线。
在实际应用中,常用第三种类型的曲线,其有可加性、可比性、可逆性等特点,能真实地反映塑性变形过程。
12-4 有一金属块,在x 方向作用有200Mpa 的压应力,在y 方向作用有200Mpa 的压应力,在z 方向作用有250Mpa 的压应力。
材料成型原理
过共析钢液η=0.0049Pa ﹒S ,钢液的密度为7000kg/m3,表面张力为1500mN/m ,加铝脱氧,生成密度为5400 kg/m3的Al2O3 ,如能使Al2O3颗粒上浮到钢液表面就能获得质量较好的钢。
假如脱氧产物在1524mm 深处生成,试确定钢液脱氧后2min 上浮到钢液表面的Al2O3最小颗粒的尺寸。
凝固速度对铸件凝固组织、性能与凝固缺陷的产生有重要影响。
试分析可以通过哪些工艺措施来改变或控制凝固速度?可以通过以下的工艺措施改变或控制凝固速度: ①改变铸件的浇注温度、浇注方式以及浇注速度; ②选用适当的铸型材料和预热温度; ③在铸型中适当设置一些冒口、浇口等; ④在铸型型腔内表面涂适当厚度与性能的材料。
比较式(3-14)与式(3-18)、式(3-15)与式(3-19),说明为什么异质形核比均质形核容易,以及影响异质形核的基本因素和其它条件。
答: V S SL ho G V r ∆-=*σ2T H T V m m s SL ∆⋅∆⋅⋅=σ2 (3-14) r he *=T H T V G V m m S SL V S SL ∆∆=∆-σσ22 (3-18) 23316⎪⎪⎭⎫ ⎝⎛∆∆⋅=∆*T H T V G m m S SL ho σπ (3-15) *he G ∆ 4cos cos 32316323θθπσ+-⎪⎪⎭⎫ ⎝⎛∆⋅∆⋅=m S m LS H T V T (3-19) (1)异质形核比均质形核容易的原因如下:首先,从(3-14)式和(3-18)式可以看出:非均质形核时的球缺的临界曲率半径与均质形核时的相同,但新生固相的球缺实际体积却比均质形核时的晶核体积小得多 ,所以,从本质上说,液体中晶胚附在适当的基底界面上形核,体积比均质临界晶核体积小得多时便可达到临界晶核半径 。
再从(3-15)式和(3-19)式可以看出:ΔG **∆⋅+-=ho he G )cos cos 32(413θθ令 ()=θf 4cos cos 323θθ+-,其数值在0~1之间变化 则 ΔG **∆⋅=ho he G f )(θ显然接触角θ大小(晶体与杂质基底相互润湿程度)影响非均质形核的难易程度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6.4 塑性变形时的应力应变关系
列维-米塞斯方程
塑性成形力学基础
6.4 塑性变形时的应力应变关系
莫尔圆
塑性成形力学基础
6.4 塑性变形时的应力应变关系
2. 应力-应变速率方程(圣维南塑性流动方程)
由dεij/dt= σ′ij dλ/dt可得应力-应变速率方程:
塑性成形力学基础
6.4 塑性变形时的应力应变关系
材料成型原理
The Principle of Material Forming
第六章 塑性成形力学基础
6.4 塑性变形时的应力应变关系
塑性成形力学基础
6.4 塑性变形时的应力应变关系
引
言
本节讨论应力状态和应变状态 之间的关系。 这种关系的数学表达式也称物 理方程,它也是求解弹性或塑性 问题的补充方程。
应力莫尔圆
塑性成形力学基础
6.4 塑性变形时的应力应变关系
应力莫尔圆
塑性成形力学基础
6.4 塑性变形时的应力应变关系
重 点
增量理论 全量理论 应力应变顺序关系
p p p
1 : 2 : 3 1 :1 : 2
p p p
塑性成形力学基础
6.4 塑性变形时的应力应变关系
小 结
在上述各种理论中,普郎特-路埃斯方程是普遍适 应的,在弹性变形可以忽略的情况下,米塞斯方程和 塑性流动方程也是普遍适应的。它们也可以推广到硬 化材料。 在塑性成形中由于难以保证简单加载,所以一般 都采用增量理论其中主要是米塞斯方程或流动方程。 小变形全量理论和增量理论可以认为是一致的。
塑性成形力学基础
6.4 塑性变形时的应力应变关系
五、 塑性应力应变验来验证塑性应力应变关系。他 引入了应力参数 和应变参数
按前述增量理论,有如下关系:
由此可得,这一关系可用试验方法来验证。
塑性成形力学基础
6.4 塑性变形时的应力应变关系
六、应变与应力顺序的对应关系
塑性成形力学基础
6.4 塑性变形时的应力应变关系
三、 塑性变形的增量理论(流动理论)
1. 列维-米塞斯方程
该理论包含以下假定: (1)材料是理想刚塑性材料,弹性应变增量为零, 塑性应变增量就是总的应变增量。
(2)材料符合米塞斯屈服准则:
(3)塑性变形时体积不变,即:
塑性成形力学基础
6.4 塑性变形时的应力应变关系
2
3)
所以有:
p p p
m
1 : 2 : 3 1 ' : 2 ' : 3 ' ( 1 m ) : ( 2 m ) : ( 3 m )
1 : 2 : 3 ( 1 m ) : ( 2 m ) : ( 3 m )
塑性成形力学基础
6.4 塑性变形时的应力应变关系
理想弹性材料的应力应变关系: 广义虎克定律
塑性成形力学基础
6.4 塑性变形时的应力应变关系
塑性变形:应力-应变增量关系 应力-应变速率关系 增量理论(流动理论):研究应力和应变增量或应 变速率之间关系的理论。 列维-米塞斯方程(理想刚塑性材料) 塑性流动方程(理想刚塑性材料) 普郎特-路埃斯方程 (弹塑性材料)
p p p
1 : 2 : 3 1 : 0 : 1
p p p
对(B)有
1 2 30
m
1 3
( 1 2 3 ) 2
所以有:
m 3
1 : 2 : 3 1 ' : 2 ' : 3 ' ( 1 m ) : ( 2 m ) : ( 3 m )
(4)应力主轴和应变增量的主轴重合; (5)应变增量和应力偏张量成正比,即;
式中dλ为瞬时的非负比例系数,它在变形过程中是变化的, 但在卸载时,dλ=0。1/2就是体积不变时的泊松比。
塑性成形力学基础
6.4 塑性变形时的应力应变关系
塑性成形力学基础
6.4 塑性变形时的应力应变关系
塑性成形力学基础
全量理论:在外载荷按比例增加等条件下,物体内 的应力状态能够做到简单加载(各应力分量按比例增 加),由此建立起应力和全量应变之间的关系,这种 关系叫全量理论,也叫形变理论。
塑性成形力学基础
6.4 塑性变形时的应力应变关系
一、 弹性应力应变关系
1、广义虎克定律 单向应力状态:虎克定律 一般应力状态:广义虎克定律 E-弹性模数;μ-泊松比; G-剪切模数,G=E/2(1+ μ )。
3. 普郎特-路埃斯方程
塑性成形力学基础
6.4 塑性变形时的应力应变关系
四、 塑性变形的全量理论(形变理论)
汉基方程(全量方程):
塑性成形力学基础
6.4 塑性变形时的应力应变关系
全量理论:
或:
理论成立条件:简单加载 使用条件:简单加载和非简单加载
例题讲解:
例:求 之比(满足塑性条件)
解:对(A)有
1、顺序关系
应力顺序:σ1〉σ2〉σ3 应变顺序:ε1〉ε2〉ε3
塑性成形力学基础
6.4 塑性变形时的应力应变关系
2、中间关系
应变与应力顺序的对应关系
塑性成形力学基础
6.4 塑性变形时的应力应变关系
塑性变形应力与应变关系
压缩类变形
伸长类变形 平面应变
塑性成形力学基础
6.4 塑性变形时的应力应变关系
塑性成形力学基础
6.4 塑性变形时的应力应变关系
弹性应力应变关系
塑性变形时假设比例系数为未知,并求之.
塑性成形力学基础
6.4 塑性变形时的应力应变关系
二、 塑性变形时的应力应变关系的特点
弹性应力应变关系具有如下特点: 1)线形关系; 2)单值关系; 3)应力主轴与应变主轴重合; 4)应力球张量使物体产生弹性体积变化,泊松μ<0.5。 塑性变形时全量应变与应力之间的关系则完全不同: 1)体积不变。应变球张量为零,泊松比μ=0.5; 2)非线性; 3)全量应变与应力的主轴不一定重合; 4)塑性变形是不可恢复的,非单值关系,与加载历史 或应变路线有关。
p p p
1 : 2 : 3 ( 1 m ) : ( 2 m ) : ( 3 m )
p p p
1 : 2 : 3 1 : 1 : 2
p p p
对(C)有
1 2 3
0
m
1 3 2 3
( 1
1 2 3
2 0
所以有:
m ( 1 2 3 ) 3 m
1
1 : 2 : 3 1 ' : 2 ' : 3 ' ( 1 m ) : ( 2 m ) : ( 3 m )
p p p
1 : 2 : 3 ( 1 m ) : ( 2 m ) : ( 3 m )