简单机械知识点
简单机械的原理知识点总结

简单机械的原理知识点总结简单机械是我们日常生活和工程中经常用到的工具,它们能够帮助我们更轻松地完成各种任务。
下面就来给大家详细总结一下简单机械的原理相关知识点。
一、杠杆杠杆是一种简单机械,由一根在力的作用下可绕固定点转动的硬棒组成。
杠杆的五要素包括支点、动力、动力臂、阻力和阻力臂。
支点是杠杆绕着转动的固定点;动力是使杠杆转动的力;阻力是阻碍杠杆转动的力;动力臂是从支点到动力作用线的距离;阻力臂是从支点到阻力作用线的距离。
根据力臂的关系,杠杆可以分为三类:1、省力杠杆省力杠杆的动力臂大于阻力臂,省力但费距离。
比如撬棍、羊角锤、铡刀等。
当使用省力杠杆时,我们用较小的动力就能克服较大的阻力,但需要移动较大的距离。
2、费力杠杆费力杠杆的动力臂小于阻力臂,费力但省距离。
例如钓鱼竿、镊子、船桨等。
使用费力杠杆时,虽然需要用较大的动力,但可以在较小的空间内实现较大的位移。
3、等臂杠杆等臂杠杆的动力臂等于阻力臂,不省力也不费力,不省距离也不费距离。
天平就是典型的等臂杠杆。
杠杆的平衡条件是:动力×动力臂=阻力×阻力臂。
这个平衡条件在解决杠杆相关问题时非常重要,可以帮助我们计算力的大小或者力臂的长度。
二、滑轮滑轮也是常见的简单机械,分为定滑轮、动滑轮和滑轮组。
1、定滑轮定滑轮的轴固定不动。
使用定滑轮不省力,但可以改变力的方向。
因为定滑轮实质上是一个等臂杠杆,动力臂和阻力臂都等于滑轮的半径。
2、动滑轮动滑轮的轴随物体一起运动。
动滑轮能省一半的力,但不能改变力的方向。
动滑轮实质上是动力臂为阻力臂二倍的杠杆。
3、滑轮组由定滑轮和动滑轮组合而成的装置叫做滑轮组。
使用滑轮组既能省力又能改变力的方向。
在计算滑轮组的省力情况时,要考虑动滑轮的个数和绳子的绕法。
如果忽略动滑轮的自重和绳子与滑轮之间的摩擦,绳子段数为 n ,那么提起物体所用的力就是物重的 1/n 。
三、斜面斜面是一种简单机械,它是一个与水平面成一定夹角的倾斜平面。
物理简单机械知识点
物理简单机械知识点“简单机械和功”部分是初中物理教学的重要内容,作为初中阶段物理学科必须要掌握的知识部分,接下来为你整理了物理简单机械知识点,一起来看看吧。
物理简单机械知识点:滑轮(1)定滑轮①定义:轴固定不动的滑轮叫定滑轮。
②好处:能改变力的方向;不足:不能省力。
③实质:等臂杠杆。
④力臂图:(2)动滑轮①定义:轴和物体一起运动的滑轮叫动滑轮。
②好处:省一半力;不足:不能改变力的方向。
③实质:动力臂是阻力臂两倍的杠杆。
④力臂图:(3)滑轮组①定义:把动滑轮和定滑轮组合在一起使用的机械。
②好处:既可以省力又可以改变力的方向;③公式:竖直放置:F=1/n(G物+G动轮) 水平放置:F=f/n S=nhV绳=nV物(n /绳子的股数F /水平拉力f /摩擦阻力S /绳子自由端移动的距离h /物体移动的高度V /速度)④绳子段数的判断:以直接作用在动滑轮上的绳子为标准⑤绕绳法:a、定绳子段数:n≥G/F b、定个数:动、定滑轮个数;c、n为奇数时从动滑轮绕起、n为偶数时从定滑轮绕起;d、绕绳子时要顺绕,且每个滑轮只穿一次绳子,不能重复。
物理简单机械知识点:杠杆(1)定义:一根硬棒在力的作用下能绕着固定的点转动,这根硬棒就是杠杆。
好处:可省力、可省距离、可改变力的方向。
(2)五要素:支点、动力、阻力、动力臂、阻力臂。
(3)力臂作图方法:①找支点;②找力的作用线;③从支点向力的作用线作垂线;(力的作用线过支点力臂为0)(4)杠杆平衡条件公式:F1L1 = F2L2 应用(最省力,力臂最长)(5)分类省力杠杆:L1﹥L2 F1﹤F2 不足:费距离费力杠杆:L1﹤L2 F1>F2 好处:省距离等臂杠杆:L1= L2 F1= F2 不省力、不省距离物理简单机械知识点:轮轴①定义:由轮和轴组成、绕同一个轴线转动。
实质:变形杠杆。
②特点:动力作用在轴上省力,动力作用在轴上费力。
③公式:F1 =F2r/R(轮半径是轴半径的几倍,作用在轮上的力就是作用在轴上的力的几分之一)物理简单机械知识点:机械效率1、有用功(1)定义:为了达到某种目的、完成某个任务,无论用什么方法都必须做的功;(2)一般计算公式:W有用= Gh;2、额外功:(1)定义:并非我们需要但又不得不做的功;(2)公式:W额外=fs;3、总功:(1)定义:有用功和额外功的和叫总功;(2)公式:W总=W有用+W额外;FS=Gh+fs4、机械效率:(1)定义:有用功和总功的比值叫机械效率;(2)公式:η=W有用/W总;(3)理解:a、有用功总是小于总功的,机械效率总是小于1;b减小额外功在总功占的比例可以提高机械效率;c、它是衡量机械性能的重要指标;d、同一机械机械效率可能不同;。
六上《简单机械》知识点整理

六上第一单元《工具和机械》1.(机械)是能使我们(省力)或(方便)的装置。
螺丝刀、钉锤、剪子这些机械构造很简单,又叫(简单机械)。
2.不同的工具有着不同的( 用途),不同的工具有着不同的(科学道理)。
3.像撬棍这样的简单机械叫做(杠杆)。
4.杠杆有三个重要的位置:用力点、支点和阻力点。
5.杠杆可以分为(省力杠杆)、(费力杠杆)、不省力也不费力杠杆三类。
杠杆是不是省力,与它的三个点的(位置)有关。
1.用力点到支点的距离(大于)阻力点到支点到的距离时,杠杆省力。
2.用力点到支点的距离(小于)阻力点到支点到的距离时,杠杆费力。
3.用力点到支点的距离(等于)阻力点到支点到的距离时,杠杆不省力也不费力。
6.剪刀是一个(阻力点会移动)的杠杆,人体的前臂骨是费力省距离的杠杆。
7.(阿基米德)是总结杠杆原理的第一人,他说:“给我一个支点,我能撬动地球。
”8.(杠杆尺)是我们研究杠杆作用的好工具,使用时要将它调节到(平衡)状态。
9. 杠杆平衡规律:左边钩码数×格数= 右边钩码数×格数杠杆类型工具实例老虎钳、撬棍、开瓶器、剥线钳、钉锤、核桃夹、独轮车、榨汁器、省力杠杆裁纸刀(切刀)、水井压杆费力杠杆钓鱼杆、镊子、火钳、筷子、烤肉夹子不省力也不费力杠杆订书机、理发剪、跷跷板、天平10.“秤砣虽小,能压千斤。
”说明杆秤是一个省力杠杆。
11.像水龙头这样,(轮子)和(轴)固定在一起转动的机械叫做(轮轴)。
13.轮轴原理:(轮轴的轮越大,轴越小),用轮带动轴转动就能越(省力)。
14.粗柄的螺丝刀能更容易地起出螺丝钉(更省力)。
柄长的扳手比柄短的扳手更省力。
15.螺丝刀是根据(轮轴)原理造成的。
16.轮轴实质上是一个连续旋转的杠杆。
滑轮也是一种(特殊的杠杆)。
17.像旗杆顶部的滑轮那样,固定在一个位置转动而不移动的滑轮叫做(定滑轮)。
18.随着重物一起(移动)的滑轮叫做(动滑轮)。
19.把(动滑轮)和(定滑轮)组合在一起使用,就构成了(滑轮组)。
2022年中考物理复习-第12章简单机械【无答案】
中考一轮复习知识点梳理与针对性分层训练第12章《简单机械》【知识点1、杠杆】一、杠杆1.杠杆的定义:在力的作用下能绕________转动的硬棒。
杠杆有直的也有弯的。
2.杠杆的五要素(1)支点:杠杆(撬棒)绕着__________的点,用字母O标出。
(2)动力:使杠杆转动的力。
画力的示意图时,用字母F1标出。
(3)阻力:__________杠杆转动的力。
画力的示意图时,用字母F2标出。
注意:动力和阻力使杠杆转动方向相反,力的方向关系遵循:“同侧异向、异侧同向”的原则。
(4)动力臂:从支点到_______________的距离。
用字母L1标出。
(5)阻力臂:从支点到_______________的距离。
用字母L2标出。
二、杠杆平衡条件1.杠杆平衡条件:动力×动力臂=阻力×阻力臂,公式:F1×L1=F2×L2。
2.杠杆的平衡条件实验(1)如图甲所示,杠杆_________(选填“是”或“否”)处于平衡状态。
(2)如图甲所示,若要使杠杆在水平位置平衡,可将杠杆左端的平衡螺母向_____调节。
(3)实验时,使杠杆在水平位置平衡的目的是:________________________________。
(4)选择杠杆的中点作为支点,目的是:________________________________。
(5)如图丙和丁所示,由竖直向下拉改为斜向左下方拉,使杠杆在水平位置始终平衡,在此过程中弹簧测力计的示数会________(选填“变大”“不变”或“变小”)三、杠杆的分类及应用【经典例题考查】1.小明用图甲装置来探究杠杆的平衡条件,设弹簧测力计和钩码对杠杆的拉力分别为动力F1和阻力F2,L1和L2分别表示动力臂和阻力臂。
他的实验思路是改变F2、L1和L2,测得杠杆平衡时所需的拉力F1,来寻找F1、F2、L1和L2四个物理量之间的关系。
已知实验前已调节杠杆在水平位置平衡,弹簧测力计的量程为0~5N,杠杆上每一格长10cm。
《第十二章 简单机械》知识点
第十二章简单机械1、在力的作用下能绕支撑点转动的硬棒叫杠杆,杠杆的五要素:①支点:杠杆绕着转动的支撑点,用O表示;②动力:使杠杆转动的力,用F1表示;③阻力:阻碍杠杆转动的力,用F2表示;④动力臂:从支点到动力作用线的垂直距离,用l1表示;⑤阻力臂:从支点到阻力作用线的垂直距离,用l2表示。
如果在动力与阻力的作用下杠杆静止或匀速转动,那么杠杆处于平衡状态,此时,动力×动力臂=阻力×阻力臂,即:F1l1= F2l2杠杆平衡。
探究杠杆的平衡条件:为什么要在实验前调节杠杆在水平位置平衡?目的是方便测出力臂的3、滑轮可以分为定滑轮和动滑轮。
定滑轮的实质是一个等臂杠杆,其特点:不省力不省距离也不省功,但可改变用力方向。
动滑轮的实质是一个动力臂等于阻力臂2倍的杠杆,其特点:省力费距离不省功,也不能改变用力方向。
滑轮组的特点:省力费距离不省功,能改变用力的方向。
滑轮组绳子段数n的判别方法:奇动偶定,即如果绳子自由端最后绕过动滑轮,则绳子段数n为奇数,如果绳子自由端最后绕过定滑轮,则绳子段数n为偶数;绳子段数为几段,则绳子自由端通过的距离就是重物上升距离的几倍。
4、功的原理:使用任何机械都不省功。
功的原理的应用:①轮轴:做功特点:拉动轮做的功等于绕在轴上绳拉动重物所做的功,即有FR=Gr;轮轴的两个主要功能:一是改变用力的大小,二是改变物体的速度;②斜面:特点:斜面长是斜面高的几倍,推力就是重力的几分之一。
5、利用机械做功时对人们有用的功叫有用功,用W有用表示,无用而又不得不做的功叫额外功,用W额表示。
W总=W有用+ W额=Fs 。
有用功与总功的比值叫机械效率,用公式表示为:一般情况下η<1,不计摩擦和滑轮的重(理想机械)则η=1。
6、实验:测量滑轮组的机械效率:①要测量的物理量:钩码的重G、拉力F、钩码上升的高度h , 拉力F移动的距离s ②器材:钩码、铁架台、细线、滑轮、弹簧测力计、刻度尺③实验时必须匀速竖直地拉动弹簧测力计上升④拉力F移动的距离s等于绳子有效段数n与钩码上升的高度h的积,即s = nh 。
八年级物理下册简单机械知识点
八年级物理下册简单机械知识点
八年级物理下册的简单机械知识点包括:
1. 机械的概念:机械是利用物体的力与运动来完成一定目的的装置。
2. 力的概念:力是物体相互作用、能够改变物体的状态或形状的原因。
3. 弹力:当物体被拉伸或压缩时产生的力称为弹力,弹力的大小与物体的伸缩量成正比。
4. 浮力:物体在液体或气体中受到的向上的支持力,称为浮力。
5. 力的合成:当多个力同时作用在物体上时,可以通过力的合成规律求得合力。
6. 力的分解:一个力可以分解为两个或多个力,分解后的力合成后等于原始力。
7. 杠杆原理:杠杆原理指的是杠杆平衡条件,即杠杆两端力的乘积相等。
8. 机械工作原理:包括杠杆、轮轴、滑轮等机械的工作原理。
9. 机械优势:机械优势是指机械在输入功和输出功方面的比值,比值大于1时,输入功小于输出功,称为机械有利。
10. 移动的机械:包括轮轴、斜轮轴、螺杆、轮轴等。
这些是八年级物理下册中的一些简单机械知识点,对于理解和应用机械原理有很大帮助。
物理八下4.1简单机械-知识点
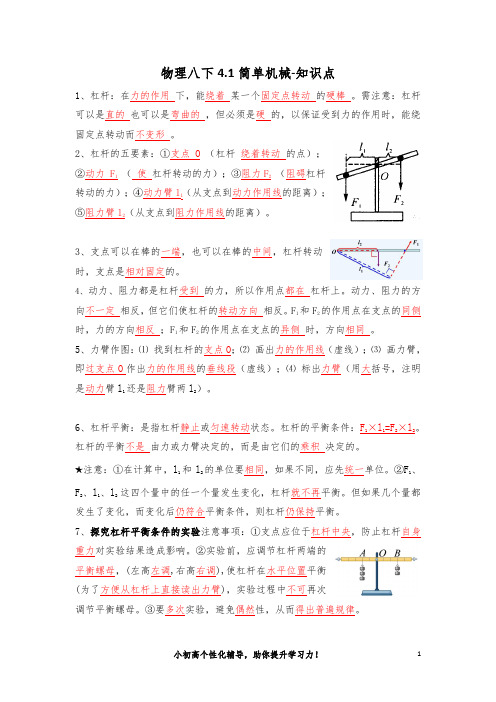
物理八下4.1简单机械-知识点1、杠杆:在力的作用下,能绕着某一个固定点转动的硬棒。
需注意:杠杆可以是直的也可以是弯曲的,但必须是硬的,以保证受到力的作用时,能绕固定点转动而不变形。
2、杠杆的五要素:①支点O(杠杆绕着转动的点);②动力 F1(使杠杆转动的力);③阻力F2(阻碍杠杆转动的力);④动力臂l1(从支点到动力作用线的距离);⑤阻力臂l2(从支点到阻力作用线的距离)。
3、支点可以在棒的一端,也可以在棒的中间,杠杆转动时,支点是相对固定的。
4、动力、阻力都是杠杆受到的力,所以作用点都在杠杆上。
动力、阻力的方向不一定相反,但它们使杠杆的转动方向相反。
F1和F2的作用点在支点的同侧时,力的方向相反;F1和F2的作用点在支点的异侧时,方向相同。
5、力臂作图:⑴找到杠杆的支点O;⑵画出力的作用线(虚线);⑶画力臂,即过支点O作出力的作用线的垂线段(虚线);⑷标出力臂(用大括号,注明是动力臂l1还是阻力臂两l2)。
6、杠杆平衡:是指杠杆静止或匀速转动状态。
杠杆的平衡条件:F1×l1=F2×l2。
杠杆的平衡不是由力或力臂决定的,而是由它们的乘积决定的。
★注意:①在计算中,l1和l2的单位要相同,如果不同,应先统一单位。
②F1、F 2、l1、l2这四个量中的任一个量发生变化,杠杆就不再平衡。
但如果几个量都发生了变化,而变化后仍符合平衡条件,则杠杆仍保持平衡。
7、探究杠杆平衡条件的实验注意事项:①支点应位于杠杆中央,防止杠杆自身重力对实验结果造成影响。
②实验前,应调节杠杆两端的平衡螺母,(左高左调,右高右调),使杠杆在水平位置平衡(为了方便从杠杆上直接读出力臂),实验过程中不可再次调节平衡螺母。
③要多次实验,避免偶然性,从而得出普遍规律。
18、杠杆的动态变化问题:确定平衡条件的四个量中,哪些是不变的量,哪个是变化的量,由控制变量法进行定性分析。
典例:如图所示,木棒OA能绕O点转动,现用力F作用于木棒的A端,使木棒OA在水平位置保持平衡,当力F由图示方向逐渐向竖直向上方向转动的过程中,力F的大小将如何变化?★分析:由于阻力和阻力臂的乘积一定,所以动力和动力臂的乘积也是一定的,力F由图示方向逐渐向竖直向上方向转动的过程中,F的力臂逐渐增大,所以F的大小逐渐减小。
物理简单机械和功知识点

物理简单机械和功知识点一、简单机械简单机械是指能够通过外力作用使其产生、转移或改变力量、速度和方向的装置。
简单机械包括杠杆、滑轮、斜面、螺旋、轮轴和齿轮等。
下面将分别介绍这些简单机械的原理和应用。
1. 杠杆杠杆是一种用来放大力量或改变力的方向的简单机械。
它由一个支点和两个力臂组成。
根据支点与力臂的相对位置,杠杆分为一级杠杆、二级杠杆和三级杠杆。
杠杆的原理是通过力矩的平衡,使力臂乘以力的大小等于力臂乘以力的大小。
杠杆的应用非常广泛,例如门上的门锁、拨动开关、游乐园中的秋千等都是利用了杠杆原理。
2. 滑轮滑轮是一种可以改变力的方向和大小的简单机械。
它由一个固定在支架上的轮子和一个绳子或链条组成。
滑轮的原理是通过改变绳子或链条的方向,使施加在绳子或链条上的力改变方向或大小。
滑轮的应用广泛,例如吊车、提升机、滑轮组等都是利用了滑轮原理。
3. 斜面斜面是一种可以减小力的大小的简单机械。
它由一个斜面和一个斜面上的物体组成。
斜面的原理是通过减小物体所受重力的垂直分量,从而减小所需的力。
斜面的应用也非常广泛,例如坡道、滑道、斜坡等都是利用了斜面原理。
4. 螺旋螺旋是一种可以转换力的方向和大小的简单机械。
它由一个螺旋线和一个施加力的杠杆组成。
螺旋的原理是通过螺旋线上的斜率,使施加在螺旋上的力转换为螺旋线方向上的力。
螺旋的应用也非常广泛,例如螺旋桨、螺纹钢筋、螺丝等都是利用了螺旋原理。
5. 轮轴轮轴是一种可以改变力的方向和大小的简单机械。
它由一个固定在支架上的轮子和一个与轮子连接的杆或绳子组成。
轮轴的原理是通过改变杆或绳子的方向,使施加在杆或绳子上的力改变方向或大小。
轮轴的应用也非常广泛,例如自行车、汽车、风车等都是利用了轮轴原理。
6. 齿轮齿轮是一种可以改变力的方向和大小的简单机械。
它由两个或多个相互啮合的齿轮组成。
齿轮的原理是通过齿轮的啮合,使施加在一个齿轮上的力转移到另一个齿轮上。
齿轮的应用也非常广泛,例如钟表、汽车变速器、自行车变速器等都是利用了齿轮原理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《动能和势能 》
1.影响动能的因素:质量、速度
当质量一定时,速度越大,动能越大。 当速度一定时,质量越大,动能越大。
2.研究动能与质量的关系时要求:同一小球,不同高度。
研究动能与速度的关系时要求:同一高度,不同小球。
3.实验中通过观察木块移动的距离来体现小球动能的大小。
4.影响重力势能的因素:质量、高度。
当质量一定时,高度越大,重力势能越大。
当高度一定时,质量越大,重力势能越大。
实验中通过观察XX陷入沙坑的深度来体现重力势能的大小。
5.影响弹性势能的因素:弹性形变程度。
《机械能及其转化》
1.机械能=动能+势能 机械能=动能+重力势能+弹性势能
2.当物体匀速上升时:动能不变,重力势能变大,机械能变大。
当物体匀速下降时:动能不变,重力势能变小,机械能变小。
3.当忽略空气阻力与摩擦力时:机械能不变。
4.近地点到远地点:动能变小,重力势能变大,机械能不变。
远地点到近地点:动能变大,重力势能变小,机械能不变。
《杠杆》
1.动力臂(阻力臂):支点到动力(阻力)作用线的距离。
2.省力杠杆:L1>L2,F1<F2(独轮车、钳子、开瓶器、撬棒、动滑轮等)
费力杠杆:L1<L2,F1>F2(船桨、镊子、钓鱼竿、筷子、理发剪刀等)
等臂杠杆:L1=L2,F1=F2(天平)
3.实验中使杠杆在水平位置平衡的目的:可以直接在杠杆上读出力臂
4.杠杆的平衡条件:动力×动力臂=阻力×阻力臂(F1L1=F2L2)
5.当动力的方向与支点和动力作用点的连线垂直时最省力,因为此时力臂最大。
《滑轮》
1.定滑轮特点:不省力,但可以改变力的方向。
2.动滑轮特点:可以省一半的力,但不能改变力的方向。
3.n表示动滑轮上绳子的段数:
滑轮上下移动时:
(1)当忽略G动、G绳、f时:
F=n1G物 S绳=nS物 V绳=nV
物
(2)当忽略G绳、f时:
F=n1(G物 +G动) S绳=nS物 V绳=nV
物
滑轮左右移动时:
F=n1f S绳=nS物 V绳=nV
物
4.滑轮组绳子绕法:(原则:由内向外、由小到大。)
当n为奇数时:从动滑轮的钩子绕起(最省力的绕法)。
当n为偶数时:从定滑轮的钩子绕起。
5.轮轴、斜面的特点:省力。
《机械效率》
1.W有:为了完成工作目的所做的功。 W总:动力所做的功。
W额:为了完成工作目的不想做但又不得不做的功。
W总=W有+W额 机械效率 :η=总有WW
2.几种常见的总功、有用功、额外功
(1)滑轮上下移动时:W有=G物h W总=FS W额=G动h s=nh
(2)滑轮左右移动时:W有=fS物 W总=FS S=nS物
F:绳子自由端拉力。 S:绳子自由端移动的距离。h:物体移动的距离。
G:物体的重力 f:物体与水平面之间的摩擦力
(3)斜面:W有=G物h W总=FS W额=fS
F:物体受到的拉力 S:物体移动的距离(斜面长度)
h:物体上升的高度(斜面高度) f:物体与斜面之间的摩擦力
3.滑轮组实验:
(1)实验原理:η=总有WW=FSGh (2)主要器材:弹簧测力计、刻度尺
(3)结论:①使用同一滑轮组提升重物时,提升的物重越大,机械效率越高。
②使用不同滑轮组提升同一重物时,动滑轮个数越少,机械效率越高。
(4)提高机械效率的方法:① 增大物体的重力
② 减小动滑轮的重力(个数)
③ 减小绳子的重力、绳与滑轮之间的摩擦
4.斜面实验:(1)斜面的粗糙程度一定时,斜面的倾斜角越大,机械效率越高。
(2)斜面的倾斜角度一定时,斜面越光滑,机械效率越高。
拓展:公式变形(机械效率)
(1)滑轮上下移动时:(G表示物体的重力、h表示物体移动的距离、F表示绳子自
由端移动的距离、S表示绳子自由端移动的距离、n表示动滑轮上绳子的段数)
η=总有WW=FSGh
η=总有WW=FSGh=FnhGh=FnG
η=总有WW=额有有WWW=hGhGhG动物物=动物物GGG=物动GG11
(2)滑轮左右移动时:(f表示物体与水平面之间的摩擦力)
η=总有WW=FSfS物 η=总有WW=FSfS物=物物FnSfS=Fnf
(3)斜面:( F表示物体受到的拉力、S表示物体移动的距离(斜面长度)
h表示物体上升的高度(斜面高度)、f表示物体与斜面之间的摩擦力)
η=总有WW=FSGh η=总有WW=额有有WWW=fSGhGh