Gaussian Integral Formula for Quaternions Based on Class Operator's Formula of Rotation Group
quaternion
cos(θ )
θ
sin(θ )
θ cos(θ )
Re
第二步的变换同样会将 −cosisn(θ(θ)) 缩放为 −∥∥zz∥∥csoisn((θθ)).这样等于是将整个坐标系 逆时针旋转了 θ ⻆,并缩放了 ∥z ∥ 倍.
所以,复数的相乘其实是旋转与缩放变换的复合.如果有一个复数 z = a + bi, 那么 z 与任意一个复数 c 相乘都会将 c 逆时针旋转 θ = atan2(b, a) 度,并将其缩放
第一步首先将 10 变换到了 csoins((θθ)) 的位置,也就是逆时针旋转了 θ 度,接下来: ∥z0∥ ∥z0∥ csoins((θθ)) = ∥∥zz∥∥ csoins((θθ))
缩放矩阵将 csoins((θθ)) 缩放了 ∥z ∥ 倍,变为 ∥∥zz∥∥ csoins((θθ)).总的来说,就是对 10 逆时 针旋转了 θ 度,并缩放了 ∥z ∥ 倍.
如果仔细观察你就能发现,复数相乘的结果其实也是一个矩阵与向量相乘的结果, 也就是说:
z1z2 = ac − bd+
(bc + ad)i = ba −ab dc
右侧的 dc 是用向量的形式来表示的 z2,而左侧的 ba
−b a
则是
z1
的矩阵形式.我
们可以发现,复数相乘这个运算,其实是与 ba −ab 这个矩阵所代表的变换是等价的
a2+b2
a2+b2
知道了这些,原矩阵就可以变形为:
ba
−ab
=
√ a2
+
b2
csoins((θθ))
−cosisn(θ(θ))
= ∥z ∥ csoins((θθ)) −cosisn(θ(θ))
高斯公式与斯托克斯公式-一、高-斯-公-式

P Q R
S S1
V
x
y
z
dV
(8 y 1 4 y 4 y)dV dV 2
V
V
2 (1 32)dzdx
S1 Dzx
32 , 故 I 2 ( 32 )
34 .
四、斯托克斯(stokes)公式
定理 设L为分段光滑的空间有向闭曲线,S是以
L为边界的分片光滑的有向曲面,L的正向与S的
x 0 所成的曲面,其法向量与
y
轴正向夹角大于
.
2
解 旋转面S方程为:
y 1 z2 x2
y x2 z2 1,
欲求
2
I (8 y 1)xdydz 2(1 y )dzdx 4 yzdxdy
S
作辅助面S1:y 3, x2 z2 2 取右侧.
I
S S1
S1
S1
h2dxdy h4 .
Dxy
( x2 cos y2 cos z2 cos )dS
S
1 h4 h4 1 h4 .
2
2
例3 计算I 8 y 1 xdydz 2 1 y2 dzdx 4 yzdxdy,
S
其中S是由曲线
z
y 11 y 3绕 y轴旋转一周
S
为锥面x2 y2 z2介于平面z 0
及z hh 0之间的部分的下侧.
且S在点 x, y,z处的法向量的方
向余弦为cos , cos , cos .
解 曲面S 不是封闭曲面, 为利用高斯公式
补充 S1 : z h ( x2 y2 h2 ) S1取上侧,
S S1构成封闭曲面, S S1围成空间区域V . 在V 上使用高斯公式,
Dxy
根据曲面积分的计算法 S1取下侧,S2取上侧.
gauss型求积公式
gauss型求积公式一、Gauss型求积公式的基本概念。
1. 定义。
- 在数值积分中,Gauss型求积公式是一种高精度的求积公式。
对于积分∫_a^bf(x)ρ(x)dx(其中ρ(x)为权函数),Gauss型求积公式的形式为∫_a^bf(x)ρ(x)dx≈∑_i = 1^nA_if(x_i)。
这里x_i称为求积节点,A_i称为求积系数,n为求积公式的节点个数。
2. 特点。
- 高精度:Gauss型求积公式具有很高的代数精度。
对于n个节点的Gauss型求积公式,其代数精度为2n - 1。
这意味着对于次数不超过2n-1的多项式f(x),该求积公式能精确成立,即∫_a^bP_m(x)ρ(x)dx=∑_i = 1^nA_iP_m(x_i),其中m≤slant2n - 1,P_m(x)是m次多项式。
- 节点分布:Gauss型求积公式的节点x_i不是等距分布的。
这些节点是关于权函数ρ(x)正交的多项式的零点。
例如,当ρ(x) = 1,[a,b]=[- 1,1]时,对应的正交多项式是勒让德多项式P_n(x),Gauss型求积公式的节点就是勒让德多项式的零点。
二、求积节点与求积系数。
1. 求积节点的确定。
- 以勒让德 - Gauss求积公式为例(ρ(x)=1,[a,b]=[-1,1]),求积节点x_i是勒让德多项式P_n(x)的零点。
勒让德多项式P_n(x)可以通过递推公式(n + 1)P_n +1(x)=(2n + 1)xP_n(x)-nP_n - 1(x),P_0(x)=1,P_1(x)=x来计算。
通过求解P_n(x)=0得到求积节点x_i。
2. 求积系数的计算。
- 求积系数A_i可以通过多种方法计算。
一种常见的方法是利用正交性条件。
对于勒让德 - Gauss求积公式,求积系数A_i可以通过公式A_i=(2)/((1 -x_i)^2)[P_{n'(x_i)]^2}计算,其中P_n'(x)是勒让德多项式P_n(x)的导数。
高等数学11.6高斯(Gauss)公式
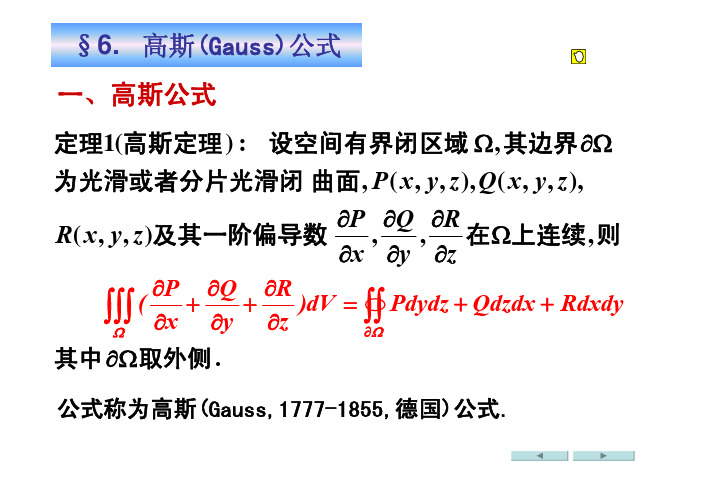
一、高斯公式
P Q R )dV ( x y z Pdydz Qdzdx Rdxdy
其中 取外侧 .
由两类曲面积分之间的关系得高斯公式的另一种形式:
P Q R Pdydz Qdzdx Rdxdy ( ) dv x y z
对图中区域 , 可添加曲面 3 ( 上侧 ),
1 2 ,
1 2 ,
1 1 3 , 2 2 3 ,
1 2
z
2
3
2
1
1 3
2 3
2
z=h
1
法向量 y z h( h 0) (0,0,1)
2 2
h
D xy
o
y
2 2 2 1 4 ( x cos y cos z cos ) dS 2 ( x y z ) dv h . 2 1
x
( x 2 cos y 2 cos z 2 cos )dS z 2 dS
2
y z h( h 0)
2 2
h
D xy
o
y
2
x P Q R ( P cos Q cos R cos )dS . ( ) dv x y z
2 2 2 ( x cos y cos z cos )dS ( x y z )dv 1
0,
( x y )dxdy ( y z ) xdydz
第六节 高斯公式和斯托克斯公式

由两类曲面积分之间的关系知
P Q R ∫∫∫ ( x + y + z )dv = ∫∫ ( P cosα + Qcos β + Rcosγ )dS.
Σ
Gauss公式的实质 Gauss公式的实质 表达了空间闭区域上的三重积分与其边界 曲面上的曲面积分之间的关系. 曲面上的曲面积分之间的关系
P Q R 或 ∫∫∫ ( + + )dv x y z = ∫∫ ( P cos α + Q cos β + R cos γ )dS
∑
里 侧, 整 边 曲 的 侧 这 ∑是 的 个 界 面 外 , cosα,cos β ,cosγ 是 上 ( x, y, z) 处的 向 ∑ 点 法 量 方 余 . 的 向 弦
1 xy
∫∫ R( x , y , z )dxdy = D R[ x , y , z2 ( x , y )]dxdy, ∫∫ Σ
Σ2
xy
∫∫ R( x , y, z )dxdy = 0. Σ
3
于是
∫∫ R( x , y , z )dxdy Σ
=
∫∫ { R[ x , y , z2 ( x , y )] R[ x , y , z1 ( x , y )]}dxdy , D
证明 设闭区域 在面 xoy 上的投影区域为 D xy .
三部分组成, Σ 由 Σ 1 ,Σ 2 和Σ 3 三部分组成,
z
Σ2 Σ3
Σ1
Σ1 : z = z1( x, y) Σ2 : z = z2 ( x, y) Σ3 x
o
Dxy
y
根据三重积分的计算法
z 2 ( x , y ) R R ∫∫∫ z dy = D { ∫z1 ( x , y ) z dz }dxdy ∫∫ xy
gauss型积分公式

gauss型积分公式
Gauss型积分公式是一种经典的积分计算方法,它是18世纪德国数学家克劳德高斯(Karl Friedrich Gauss)提出的数学方法,又称作高斯积分或高斯积分公式。
这种积分方法非常简单、实用,是数学及其相关学科研究时常用到的数学工具。
Gauss型积分公式的特点是它可以将复杂的一元定积分问题转化为解一个多项式方程组的几何问题,从而减少不少的计算量。
它的优势在于,无论是写出这种方程,结合数学技巧便可算出结果,还可用另一种方法,通过积分变换来完成积分计算,而且可以在结果上获得较高的精度。
Gauss型积分公式可简化定积分问题计算,但由于其复杂性,对多元积分这类计算量较大的问题无能为力。
在这种情况下,可以使用另外一种积分方法,即数值积分法,在这种方法中,采用多项式函数来模拟定积分问题,从而减少计算量,并可以得出比较准确的结果。
Gauss型积分公式在数学研究中具有重要意义,可求出很多有用的结果,尤其是在求解复杂的一元定积分问题上。
它的有效性可以通过用它来求曲线的极限等数学知识的计算来证明。
此外,它还可以用于计算椭圆积分,复数积分等。
Gauss型积分公式的应用范围十分广泛,它在数学研究中可以帮助研究者减少许多计算量,从而节省时间,使得数学研究变得更加有效率。
它在量子力学、电磁学、计算物理学、天文学、计算生物学以及统计学等领域也有着广泛的应用。
从以上可以看出,Gauss型积分公式在数学及其相关学科中具有重要意义,它可以帮助研究者提高研究效率,具备很多实用性,是一个重要的数学工具。
对于Gauss型积分公式的应用,学者们和工程研究者们都应该进行进一步的深入研究,从而更好地发挥它的作用。
高斯公式
∫∫ xdydz + ydzdx + zdxdy=3∫∫∫ dxdydz=3V
Σ Ω
于是得空间立体Ω的体积公式:
1 V= ∫∫ xdydz + ydzdx + zdxdy 3 Σ
E-mail: xuxin@
例1 计算曲面积分 其中Σ为柱面 x + y = 1及平 面 z = 0, z = 3 所围成的空间闭 区域Ω 的整个边界曲面的外侧.
Ω
3
(利用柱面坐标得)
= ∫∫∫ ( r sin θ − z )rdrdθdz
Ω
1
o
1
y
x
= ∫ dθ ∫ dr ∫ r (sin θ − z )rdz
0 0 0
2π
1
3
9π =− . 2
E-mail: xuxin@
使用Guass公式时应注意:
1. P , Q , R 是对什么变量求偏导数;
= ∫∫ ( P cos α + Q cos β + R cos γ )dS
∑
这里 ∑ 是Ω 的整个边界曲面的外侧, cosα , cos β , cos γ 是 ∑ 上点( x , y , z )处的法向 量的方向余弦.
E-mail: xuxin@
证明 设闭区域Ω 在面 xoy 上的投影区域为 D xy .
∫∫ Pdydz + Qdzdx + Rdxdy
Σ
∂P ∂Q ∂R = ∫∫ ( P cos α + Q cos β + R cos γ )dS=∫∫∫ ( + + )dv ∂x ∂y ∂z Σ Ω
E-mail: xuxin@
注5 在Gauss公式中,如取:
高数之 高斯公式,通量与散度
证:设 cos α 、 cos β 、 cos γ 是 Σ 在点 ( x, y, z ) 处的外法线向量的方向余弦,则
∂v = vx cos α + v y cos β + vz cos γ . ∂n
故
∫∫ u ∂ndS = ∫∫ (uv
Σ Σ
∂v
x
cos α + uv y cos β + uvz cos γ )dS
0 0
1
3
2π 0
dθ ∫ ρ d ρ ∫ zdz
0 0
1
3
1 9 9 = 0 − 2π ⋅ ⋅ = − π . 2 2 2
2
(2) 【P228, 例 3】 I=
∫∫ ( z
Σ
2
1 2 2 + x)dydz − zdxdy , 其中 ∑ 是旋转抛物面 z = ( x + y ) 介于平面 z = 0 2
Ω
= −∫
2π 0
π 1 1 2 dθ ∫ 2 sin ϕ dϕ ∫ r 4 dr = −2π ⋅1⋅ = − π . 0 0 5 5
例 2【P232,例 3】 设函数 u ( x, y, z ) 和 v( x, y, z ) 在空间闭区域 Ω 上具有一阶及二阶连续偏导数, 证明 Green 第一公式:
Σ1 Σ1
h 2 dxdy = h 2 ⋅ π h 2 = π h 4 .
x 2 + y 2 ≤ h2
故,原式 =
Σ+Σ1
∫∫ x dydz + y dzdx + z dxdy − ∫∫ x dydz + y dzdx + z dxdy = 2 h
2 2 2 2 2 2
四元数-wiki
Graphical representation of quaternion units product as 90°rotation in 4D-space, ij = k, ji = −k, ij = −ji
ters (1840), but neither of these writers trБайду номын сангаасated the fourparameter rotations as an algebra.[7][8] Carl Friedrich Gauss had also discovered quaternions in 1819, but this work was not published until 1900.[9][10]
Hamilton knew that the complex numbers could be interpreted as points in a plane, and he was looking for a way to do the same for points in three-dimensional space. Points The unit quaternions can therefore be thought of as a in space can be represented by their coordinates, which choice of a group structure on the 3-sphere S3 that gives are triples of numbers, and for many years he had known the group Spin(3), which is isomorphic to SU(2) and also how to add and subtract triples of numbers. However, to the universal cover of SO(3). Hamilton had been stuck on the problem of multiplication and division for a long time. He could not figure out how to calculate the quotient of the coordinates of two points in space. 1 History Main article: History of quaternions Quaternion algebra was introduced by Hamilton in 1843.[6] Important precursors to this work included Euler’s four-square identity (1748) and Olinde Rodrigues' parameterization of general rotations by four parame1 The great breakthrough in quaternions finally came on Monday 16 October 1843 in Dublin, when Hamilton was on his way to the Royal Irish Academy where he was going to preside at a council meeting. As he walked along the towpath of the Royal Canal with his wife, the concepts behind quaternions were taking shape in his mind. When
四元数与三维旋转
Theorem 2: 2D 旋转公式(复数积型) v′ = zv = (cos(θ) + i sin(θ))v
1.3.1 复数的极坐标型 cos(θ) + i sin(θ) 还可以进行下一步的变形.根据欧拉公式(Euler’s Formula), cos(θ) + i sin(θ) = eiθ
z = a − bi
我们只需要翻转 z 虚部的符号就能得到它的共轭了.如果我们尝试计算 zz,我们会 发现:
zz = (a + bi)(a − bi) = a2 − abi + abi + b2 = a2 + b2 = ∥z∥2
所以,一个复数的模⻓又可以通过乘积的方式进行计算: √
∥z∥ = zz
1.3 复数相乘与 2D 旋转
cos(θ)
θ θ
cos(θ)
sin(θ) Re
第二步的变换同样会将 − sin(θ) 缩放为 −∥z∥ sin(θ).这样等于是将整个坐
cos(θ)
∥z∥ cos(θ)
标系逆时针旋转了 θ ⻆,并缩放了 ∥z∥ 倍.
所以,复数的相乘其实是旋转与缩放变换的复合.如果有一个复数 z = a + bi,那 么 z 与任意一个复数 c 相乘都会将 c 逆时针旋转 θ = atan2(b, a) 度,并将其缩放
欧拉公式的证明在微积分的课程中应该都会涉及到,这里就不作证明了.有了这一
个等式,我们能将复数表示为,
z = ∥z∥ cos(θ) − sin(θ) sin(θ) cos(θ)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CollINlUn.Theor.Phys.(Beijing,China)50(2008)PP.861 863 ⑥Chinese Physical Society Vo1.50,No.4.October 15,2008
Gaussian Integral Formula for Quaternions Based on Class Operator’s Formula of Rotation Group FAN Hong—Yi1,0 and XU Zhi—Hua2 1 Department of Physics,Shanghai Jiao Tong University,Shanghai 200030,China 2DeDartment of Material Science and Engineering,University of Science and Technology of China,Hefei 230026j China
fReceived February 7,2007) A bstract There exists rare integration formulas over quaternions due to the noncommutativity of quarternions mult— DJjcatjon.Based on the cJass operator's formula ofrotation group we derive a Gaussian integral formula for quaternions, _wmch js similar in form t0曲e integration for coherent state’s completeness relation.
PACS numbers:03.65.Ca Key words:Gaussian integration for quaternions,rotation group,class operator
I Introduction Early in 1843 the great physicist W.R.Hamilton. the founder of analytic mechanics,invented quaternions. Since then quaternion has been applied to studying ro- tation e.g.,there is a two—to-one corresp0ndence between unit quaternions and 3D rotations around an axis through the origin.In this work we try to make a new connection between quaternion operation and the class operator of rotation group.Recal1 that in a previous papert J we have derived the class operator’s formula of su(2)group and got then re—derived in other ways in Refs.【2]一[4】.By the class operator it means that all the rotations that have the same rotation angle砂belong to a class,the class operator js deftned as
c ( ): d sin d exp{i ( sin c。s + sin0 sin + COS )), (1) where J {j q1 and 3;are 3 components of the angular momentum operators the integration over d and dO are difficult,since, , ,and Jz do not commute with each other,
, 】=i
However,using the technique of integration within an or— dered product(IWOP)of operators,[5l6]and Schwinger’s bosonic realization of angular momentum[71 we have sue—
cessively performed the integration in Eq.(1)and ob— tained the explicit form of class operator,i.e.
where =
t :4r,2+1 +J +J is the Casimir operator.Equation named class operator formula and has got further
confirmed in Refs.『5]and『6】.Recently,many attempts have been made in order to formulate quantum mechanics in Hilbert space over the skew—field of quaternions.How- ever,so far as we know,integrations over quaternions have been seldom touched in the literature before,since quater- nions’muiriplication is not comnmtative.Here we shall employ formula(3)to study some important integration formula over quaternions.Our work is arranged as follows. In Sec.2 we briefly review the elementary properties of quaternions.In Sec.3 we derive an important integration formula over quaternions,which resembles the important integration for proving the completeness of coherent state.
2 Elementary Properties of Quaternions A quaternion w is an expression that is the sum of a real number and a vector and that contains four terms, one real and three imaginary,
w=Wl+w2ei+w3ej+W4ek (5) We can think of these w{as the coefficients of a polynomial in three imaginary variables ei,ej,e ,
e e; e;=一1 (6) 叫2,W3,and w4 are the usual numbers.Quaternion arith— metic is determined by the behavior of these three imagi— nary variables,for instance,
eiej -ejei ek・ejek -ekej One can derive lots of other relationships from these. Notice that multiplication of the variables is non- commutative,so one can also write quaternion multipli— cation using matrices.The conjugate of a quaternion w, analogous to the eoniugate of a complex number,is
w =Wl—W28i—Waej—W4ek The project supported by National Natural Science Foundation of China under Grant No.10475056 862 FAN HongYi and XU Zhi—Hua V_01
.50
The dot—product(inner product)of two quaternions is their usua]vector dot—product,and the squared length
of叫is —
I叫I =W}.4-W;.4- ;.4- i. (9) A unit quaternion having three degrees of freedom has squared length one.The quaternion has been successfullv applied to solving some successive rotation problems.In
this work we shall employ the class operator formula to
derive a new Gaussian integration formula of quaternions. which may have uses in physics or mathematical physics
.
., exp{,l ̄l。+ + 叫 ,,where and are real num— bers,d4w三dwldw2dw3dw4.This integra1 is similar in
form to the complex integral
/ ex I [2+I.tz+vz*):÷xp{一 (10)
which is useful for proving the completeness relation of the bosonic coherent state