LIN总线

LIN简介
LIN协会创建于1998年末,最初的发起人为为宝马、Volvo、奥迪、VW、戴姆勒-克莱斯勒、摩托罗拉和 VCT等,五家汽车制造商,一家半导体厂商以及一家软件工具制造商。该协会将主要目的集中在定义一套开放的标准,该标准主要针对车辆中低成本的内部互联网络(LIN, local interconnect networks),这些地方无论是带宽还是复杂性都不必要用到CAN网络。LIN标准包括了传输协议的定义、传输媒质、开发工具间的接口、以及和软件应用程序间的接口。LIN提升了系统结构的灵活性,并且无论从硬件还是软件角度而言,都为网络中的节点提供了相互操作性,并可预见获得更好的EMC(电磁兼容)特性。
LIN补充了当前的车辆内部多重网络,并且为实现车内网络的分级提供了条件,这可以有助于车辆获得更好的性能并降低成本。LIN协议致力于满足分布式系统中快速增长的对软件的复杂性、可实现性、可维护性所提出的要求,它将通过提供一系列高度自动化的工具链来满足这一要求。
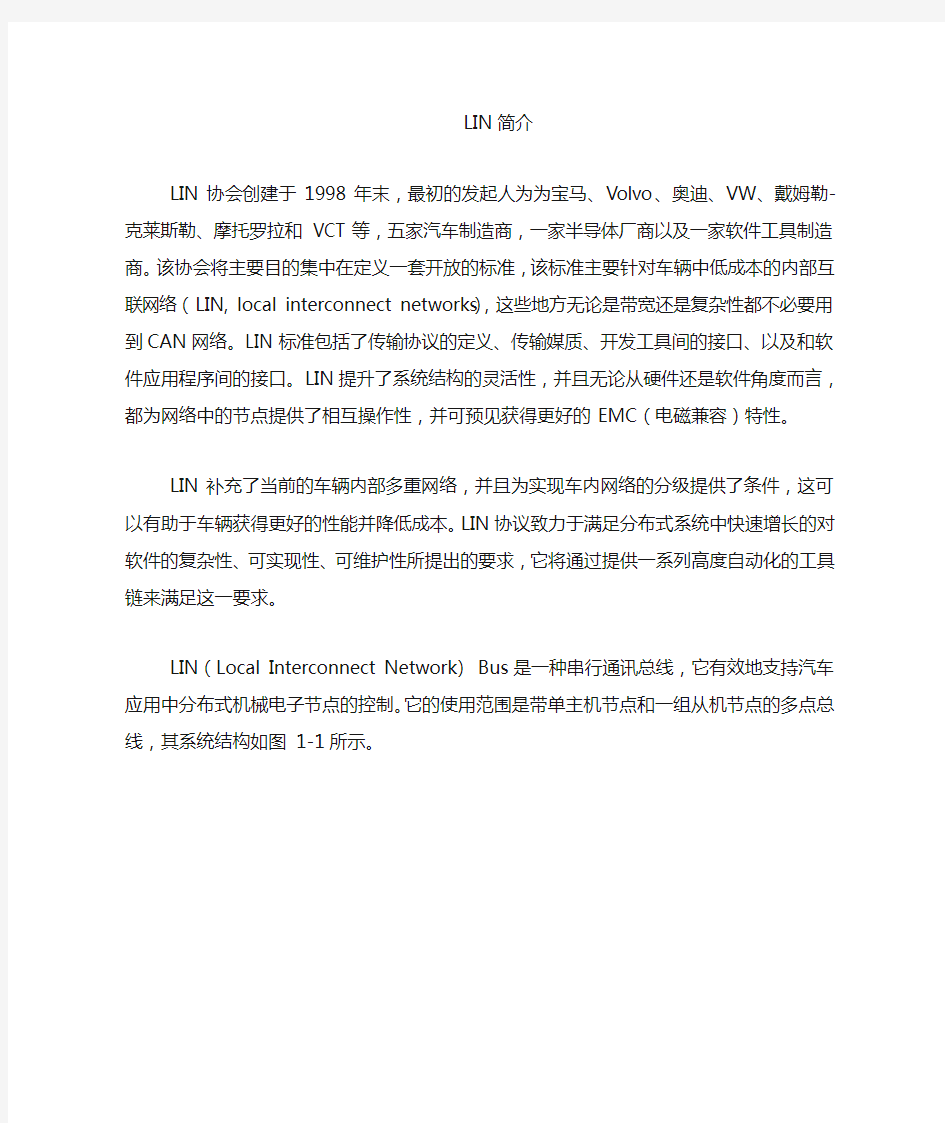
LIN(Local Interconnect Network) Bus是一种串行通讯总线,它有效地支持汽车应用中分布式机械电子节点的控制。它的使用范围是带单主机节点和一组从机节点的多点总线,其系统结构如图 1-1所示。
图 1-1 LIN Bus系统结构
LIN Bus系统主要特性有:
■单主机多从机组织(即没有总线仲裁),配置灵活;
■基于普通UART/SCI 接口的低成本硬件实现低成本软件协议;
■带时间同步的多点广播接收,从机节点无需石英或陶瓷谐振器,可以实
现自同步;
■保证信号传输的延迟时间。可选的报文帧长度:2、4 和8 字节;
■数据校验和的安全性和错误检测,自动检测网络中的故障节点;
■使用最小成本的半导体组件(小型贴片,单芯片系统)。
■速度高达20kbit/s;
LIN网络由一个主节点以及一个或多个从节点组成,媒体访问由主节点控制--从节点中不必有仲裁或冲突管理。可以保证最差状态下的信号传输延迟时间。 LIN相对于CAN的成本节省主要是由于采用单线传输、硅片中硬件或软件的低实现成本和无需在从节点中使用石英或陶瓷谐振器。
LIN物理层
总线驱动/接收器的定义遵循ISO 9141单线标准,并带有一些增强性能。总线为单线传输,"与"总线通过终端电阻由电池正极节点(VBAT)提供。总线收发器采用增强型的ISO 9141实现标准。总线可以取两个互补的逻辑值:主控值其电压接近于接地端,代表逻辑值"0",退让值其电压与电池电压接近,代表逻辑值"1"。
总线采用上拉电阻作为终端,主节点的上拉电阻为1kOhm,从节点的上拉电阻为30kOhm。电阻需串联一个二极管以防止由于本地电源泄漏对总线产生的干扰。从节点的终端电容通常值为 CSlave= 220pF,主节点的电容要更高以使整个总线的电容小于从节点的值。
由于采用单线媒质传输,最大的传输波特率被限定在20kbit/s以内。该值为从满足信号同步而不产生冲突的最高值,到为满足电磁兼容性要求而要达到的传输最低值之间的实验中间值。最小的传输波特率为1kbit/s--这有助于避免在实际中产生超时冲突。
LIN协议
通过LIN总线传输的实体为帧。一个报文帧由帧头以及回应(数据)部分组成。在一个激活的LIN 网络中,通讯通常由主节点启动,主节点任务发送包含有同步间隙的报文头,同步字节以及报文标志符(ID)。一个从节点的任务通过接收并过滤标志符被激活,并启动回应报文的传送。回应中包含了1到8个字节的数据以及一个字节的校验码。
传输一帧所花费的总的时间是发送每个字节所用的时间,加上从节点的回应间隙,再加上传输每个字节的间隙时间(inter-byte space)。字节间隙是指发送完前一个字节的停止位后到发送下一个字节的启动位之间的时间。
LIN协议的核心特性是使用进度表(schedule table)。进度表有助于保证总线不出现过载的情况,他们同样是保证信号定期传输的核心组件。在一组LIN节点中只有主节点任务才可以启动通讯保证了行为的确定性。主节点有责任保证与操作模式相关的所有帧都必须分配了足够长的传输时间。
LIN信息是以报文的形式传送的。报文传输是由报文帧的格式形成和控制的。报文帧由主机任务向从机任务传送同步和标识符信息,并将一个从机任务的信息传送到所有其它从机任务。主机任务位于主机节点内部,它负责报文的进度表、发送报文头(HEADER)。从机任务位于所有的(即主机和从机)节点中,其中一个(主机节点或从机节点)发送报文的响应(RESPONSE)。
帧内部间隔(inter-frame space)是从上一帧发送完毕后到下一帧启动发送间的时间间隔。帧由帧间间隔以及接下来的4到11个字节域组成。
一个报文帧如图 1-2所示,是由一个主机节点发送的报文头和一个主机或从机节点发送的响应组成。报文帧的报文头包括一个同步间隔场(SYNCH BREAK
FIELD)、一个同步场(SYNCH FIELD)和一个标识符场。报文帧的响应(RESPONSE)则由3 个到9 个字节场组成:2、4 或8 字节的数据场(DATA FIELD)和一个校验和场(CHECKSUM FIELD)。字节场由字节间空间分隔,报文帧的报文头和响应是由一个帧内响应空间分隔。最小的字节间空间和帧内响应空间是0,这些空间的最大长度由报文帧的最大长度TFRAME_MAX。
图 1-2 LIN 报文帧
LIN信息传输过程
LIN从机向主机传输数据示如图1-3所示,整个过程在主机的协调下进行。
图1-3 从机向主机传输数据
LIN主机向两个或两个以上的从机发送数据如图1-4所示,整个过程在主机的协调下进行。
图1-4 主机向两个或两个以上的从机发送数据
从机和从机之间传输数据如图1-5所示,整个过程在主机的协调下进行。
图1-5 从机和从机之间传输数据
LIN物理层控制
■同步间隔(SYNCHRONISATION BREAK)检测
为了能清楚识别报文帧的开始,报文帧的第一个场是一个同步间隔。同步间隔场(SYNCH BREAK FIELD)是由主机任务发送,它使所有的从机任务与总线时钟信号同步。同步间隔场有两个不同的部分如图1-6所示。第一个部分是由一个持续TSYNBRK或更长时间(即最小是TSYNBRK不需要很严格)的显性总线电平。接着的第二部分是最少持续TSYNDEL 时间的隐性电平,作为同步界定符。第二个场允许用来检测下一个同步场(SYNCH FIELD)的起始位。最大的间隔和界定符时间没有精确的定义,但必须符合整个报文头THEADER_MAX 的总体时间预算,THEADER_MAX在表1-1中定义。
图1-6 同步间隔场
表1-1 报文的定时
同步间隔场的显性电平长度至少为TSYNBRK(可以更长),这个时间是用主机位定时来测量。最小值应根据连接从机节点指定的最小本地时钟频率所要求的阀值而得出。
LIN应用
采用LIN可实现车内网络分级,从而成为车辆制造商提供更高的质量及更低成本的重要因素。它可以为工业领域的软件开发提供最好的实现方式:抽象及更好的组合能力。LIN可以简化很多现有的低端复合解决方案,并且可以降低车辆电子系统的开发、生产、服务及后勤成本。
采用配备LIN的轿车生产线正在快速增长,而下一代轿车雄心勃勃的计划也许是LIN成功的最好证明。简捷而完整的LIN规范包含了完整的网络概念,极高的自动化程度已经使LIN和CAN成为了车内通讯网络的主干。一部分市场增长甚至出现在车内网络部分减少的地方。
2003年发布的LIN 2.0规范增强了组件在不同车辆生产厂商间的通用性,并且通过引入节点能力描述文件(Node Capability Description File)增强了自动化设计能力,同时还对同一网络中的相同LIN设备定义了重配置机制。
1、简述LIN总线的特点,与CAN总线的区别,以及在汽车总线中的位置。
2、LIN总线的通信方式有哪几种?简述其中一种的通信过程。
3、简述LIN的分层结构,以及各层的主要功能。
4、详细介绍LIN的报文帧的组成和各部分的结构。
5、某一时刻LIN总线的主节点发出了标识符为0x3C的帧头,试画出整个帧头
的数据格式。
1.简述计算机网络体系结构。
2.简述网络系统各层的主要功能。
3.网络拓扑分为哪几种?各有什么特点?
4.SAE将汽车总线分为哪几种?各有什么特点?
5.CAN总线的特点是什么?解释CAN的高层协议概念。
6.简述CAN的分层结构,以及各层的主要功能。
7.名词解释:多主机、位速率、报文、发送器、接收器。
8.CAN报文传输分为几类帧?
9.CAN的数据帧由哪几部分组成?画出数据帧的结构图。
10.CAN规范使用目前还存在哪些缺陷?有什么解决办法?
1. CAN总线的报文传送由几种不同类型的帧表示和控制?请分别叙述其不同的组成和作用。
2. CAN总线报文传送的优先级是如何确定的?
3.CAN总线仲裁是如何实现的?为什么称之为“非破坏性总线仲裁技术”?
4. CAN有几种错误类型?如何处理错误?
LIN总线物理接口器件MC33399的原理及应用
LIN总线物理接口器件MC33399的原理及应用 摘要:MC33399是Frescale公司推出的汽车LIN总线单线物理接口器件。文中详细介绍了MC33399的主要功能、内部结构以及工作原理,并在此基础上给出了MC33399的典型应用电路。关键词:MC33399 LIN总线汽车电子 1 概述 LIN(Local Interconnect Network局域互连网络)是一种低成本的总线网络。其最初的开发目的在于弥补CAN总线的不足,主要用于汽车中某些对通信速率要求不高的场合,LIN总线作为CAN总线的辅助网络或子网络使用可以解决汽车内因导线过多所带来的许多问题。 一个简单的LIN节点除了微控制器外,还需要两个芯片,即LIN接口芯片和5V的电压调节器。Freescale公司的MC33399芯片是专用于LIN的单线物理接口器件。该器件的功耗非常低,可控制外部稳压器,安全符合LIN规范,抗干扰能力强,是一种高性能的模拟器件,适用于工作环境比较复杂的汽车。MC33399的主要特点如下: ·通信速率范围为1~20kb/s; ·额定工作电压:8V~18V,正常电压:7V~27V; ·无功节点不影响总线状态; ·有正常和睡眠两种工作模式,睡眠模式下的静态电流仅20μA; ·LIN总线唤醒、MCU命令唤醒以及接口外部高压开关输入唤醒; ·通过兼容的CMOS I/O脚与MCU进行接口; ·带有外部稳压器控制功能; ·内置上拉电阻; ·LIN引脚的ESD电压可达4kV; ·具有很好的电磁兼容性; ·工作温度范围为-40℃~125℃。 2 引脚功能 MC33399采用SO8型贴片式封装。图1示出引脚排列,各引脚的功能说明如表1所列。表1 MC33399的引脚功能 引脚号引脚名功能
LIN总线的单片机实现
1 概述 LIN协议是新出现的一种新型低成本串行通信总线,其全称是Local Interconnect Network,即局部互联网络。它最开始出现于汽车行业,是为解决汽车智能化和网络化的发展要求和降低汽车制造成本的矛盾而提出来的一种串行总线协议,主要用于车门、车灯等需要简单控制但又要求智能控制的场合。它的主要特点是:采用单个主控制器/多从设备通信模式;基于普通UART/SCI接口硬件实现,协议简单;网络传输速率不高,最高可达20kb /s。由于LIN协议的突出特点是协议对硬件的依赖程度低,可以基于普通单片机的通用串口等硬件资源以软件方式实现,成本低廉,因此可广泛应用于汽车行业以外的其他领域,如智能家庭网络内部的数据传输、节点控制等场合。 本文依据对LIN协议的分析,对其协议在普通单片机上的具体实现,即如何利用单片机有限的硬件资源实现LIN的主节点、从节点,进行可行性方案的研究、探讨。 2 LIN协议的简介 LIN协议的最新版本是LIN Specification Package Revision 2.O,包括协议规范、节点诊断配置规范、物理层规范、API规范等几个方面,从硬件配置到节点配置语言都作了详细的规定。下面就其协议规范作一简要介绍和分析。 LIN的数据传输是采用报文帧的形式进行的。一个完整的报文帧由1个主机节点发送的报文头(header)和1个主机或从机节点发送的响应(response)组成,如图1所示。报文头包括1个间隔场(break)、1个同步字节场(synch)和1个保护标识符字节场 PID(Protected IDentifier)。间隔场是由持续了至少13个位时的显性电平和至少1个位时的隐性电平组成;由主机节点产生,标志着一次数据通信过程报文帧的开始。同步字节场包含时钟同步信息。同步字节场的格式是0x55,表现在8个位定时中有5个下降沿,即隐性跳变到显性的边沿。 所有从机节点在主机节点发布报文头之后都应能检测到间隔场的存在,并且在正确地接收同步字节场后,准确计算出主机节点将要发送数据的波特率,并以此波特率作为下一步要发送或接收数据的波特率的设定值。这样,经过了间隔场和同步字节场的接收,所有的从机节点达到了与主机节点的同步。 下一步,所有的从机节点以计算得到的波特率来接收报文头的保护标识符字节场。
LIN总线
LIN简介 LIN协会创建于1998年末,最初的发起人为为宝马、Volvo、奥迪、VW、戴姆勒-克莱斯勒、摩托罗拉和 VCT等,五家汽车制造商,一家半导体厂商以及一家软件工具制造商。该协会将主要目的集中在定义一套开放的标准,该标准主要针对车辆中低成本的内部互联网络(LIN, local interconnect networks),这些地方无论是带宽还是复杂性都不必要用到CAN网络。LIN标准包括了传输协议的定义、传输媒质、开发工具间的接口、以及和软件应用程序间的接口。LIN提升了系统结构的灵活性,并且无论从硬件还是软件角度而言,都为网络中的节点提供了相互操作性,并可预见获得更好的EMC(电磁兼容)特性。 LIN补充了当前的车辆内部多重网络,并且为实现车内网络的分级提供了条件,这可以有助于车辆获得更好的性能并降低成本。LIN协议致力于满足分布式系统中快速增长的对软件的复杂性、可实现性、可维护性所提出的要求,它将通过提供一系列高度自动化的工具链来满足这一要求。 LIN(Local Interconnect Network) Bus是一种串行通讯总线,它有效地支持汽车应用中分布式机械电子节点的控制。它的使用范围是带单主机节点和一组从机节点的多点总线,其系统结构如图 1-1所示。 图 1-1 LIN Bus系统结构 LIN Bus系统主要特性有: ■单主机多从机组织(即没有总线仲裁),配置灵活; ■基于普通UART/SCI 接口的低成本硬件实现低成本软件协议; ■带时间同步的多点广播接收,从机节点无需石英或陶瓷谐振器,可以实
现自同步; ■保证信号传输的延迟时间。可选的报文帧长度:2、4 和8 字节; ■数据校验和的安全性和错误检测,自动检测网络中的故障节点; ■使用最小成本的半导体组件(小型贴片,单芯片系统)。 ■速度高达20kbit/s; LIN网络由一个主节点以及一个或多个从节点组成,媒体访问由主节点控制--从节点中不必有仲裁或冲突管理。可以保证最差状态下的信号传输延迟时间。 LIN相对于CAN的成本节省主要是由于采用单线传输、硅片中硬件或软件的低实现成本和无需在从节点中使用石英或陶瓷谐振器。 LIN物理层 总线驱动/接收器的定义遵循ISO 9141单线标准,并带有一些增强性能。总线为单线传输,"与"总线通过终端电阻由电池正极节点(VBAT)提供。总线收发器采用增强型的ISO 9141实现标准。总线可以取两个互补的逻辑值:主控值其电压接近于接地端,代表逻辑值"0",退让值其电压与电池电压接近,代表逻辑值"1"。 总线采用上拉电阻作为终端,主节点的上拉电阻为1kOhm,从节点的上拉电阻为30kOhm。电阻需串联一个二极管以防止由于本地电源泄漏对总线产生的干扰。从节点的终端电容通常值为 CSlave= 220pF,主节点的电容要更高以使整个总线的电容小于从节点的值。 由于采用单线媒质传输,最大的传输波特率被限定在20kbit/s以内。该值为从满足信号同步而不产生冲突的最高值,到为满足电磁兼容性要求而要达到的传输最低值之间的实验中间值。最小的传输波特率为1kbit/s--这有助于避免在实际中产生超时冲突。 LIN协议 通过LIN总线传输的实体为帧。一个报文帧由帧头以及回应(数据)部分组成。在一个激活的LIN 网络中,通讯通常由主节点启动,主节点任务发送包含有同步间隙的报文头,同步字节以及报文标志符(ID)。一个从节点的任务通过接收并过滤标志符被激活,并启动回应报文的传送。回应中包含了1到8个字节的数据以及一个字节的校验码。 传输一帧所花费的总的时间是发送每个字节所用的时间,加上从节点的回应间隙,再加上传输每个字节的间隙时间(inter-byte space)。字节间隙是指发送完前一个字节的停止位后到发送下一个字节的启动位之间的时间。 LIN协议的核心特性是使用进度表(schedule table)。进度表有助于保证总线不出现过载的情况,他们同样是保证信号定期传输的核心组件。在一组LIN节点中只有主节点任务才可以启动通讯保证了行为的确定性。主节点有责任保证与操作模式相关的所有帧都必须分配了足够长的传输时间。 LIN信息是以报文的形式传送的。报文传输是由报文帧的格式形成和控制的。报文帧由主机任务向从机任务传送同步和标识符信息,并将一个从机任务的信息传送到所有其它从机任务。主机任务位于主机节点内部,它负责报文的进度表、发送报文头(HEADER)。从机任务位于所有的(即主机和从机)节点中,其中一个(主机节点或从机节点)发送报文的响应(RESPONSE)。 帧内部间隔(inter-frame space)是从上一帧发送完毕后到下一帧启动发送间的时间间隔。帧由帧间间隔以及接下来的4到11个字节域组成。 一个报文帧如图 1-2所示,是由一个主机节点发送的报文头和一个主机或从机节点发送的响应组成。报文帧的报文头包括一个同步间隔场(SYNCH BREAK
LIN总线
LIN总线的认识与分析 LIN总线简介 LIN(Local Interconnect Network)是低成本的汽车网络,它是现有的汽车复用网络功能上的补充。为了获得更多的质量提高和降低成本,LIN将是在汽车中使用汽车分级网络的启动因素。LIN的标准化将减少重复使用现有的低端复用解决方案,而且将减低汽车电子的开发、生产、服务和后勤成本。 LIN标准包括传输协议规范、传输介质规范、开发工具接口规范和软件编程接口规范。LIN在硬件和软件上保证了网络节点的互操作性,并能预测EMC。 这个规范包包括了3个主要部分: LIN协议规范部分——介绍了LIN的物理层和数据链路层。 LIN配置语言描述部分——介绍了LIN配置文件的格式。LIN配置文件用于配置整个网络并作为OEM和各种网络节点供应厂商的通用接口,以及作为开发和分析工具的输入。 LIN API部分——介绍了网络和应用程序之间的接口。 这个概念可以实现开发和设计工具之间的无缝连接,并提高了开发的速度,增强了网络的可靠性。 LIN协会创建于1998年末,最初的发起人为为宝马、Volvo、奥迪、VW、戴姆勒-克莱斯勒、摩托罗拉和 VCT等,五家汽车制造商,一家半导体厂商以及一家软件工具制造商。该协会将主要目的集中在定义一套开放的标准,该标准主要针对车辆中低成本的内部互联网络(LIN, local interconnect networks),这些地方无论是带宽还是复杂性都不必要用到CAN网络。LIN标准包括了传输协议的定义、传输媒质、开发工具间的接口、以及和软件应用程序间的接口。LIN提升了系统结构的灵活性,并且无论从硬件还是软件角度而言,都为网络中的节点提供了相互操作性,并可预见获得更好的EMC(电磁兼容)特性。 LIN补充了当前的车辆内部多重网络,并且为实现车内网络的分级提供了条件,这可以有助于车辆获得更好的性能并降低成本。LIN协议致力于满足分布式系统中快速增长的对软件的复杂性、可实现性、可维护性所提出的要求,它将通过提供一系列高度自动化的工具链来满足这一要求。 LIN(Local Interconnect Network) Bus是一种串行通讯总线,它有效地支持汽车应用中分布式机械电子节点的控制。它的使用范围是带单主机节点和一组从机节点的多点总线,其系统结构如图 1-1所示。
LIN总线学习手记(全)
LIN总线学习手记1 * LIN概况 LIN(Local Interconnect Network)是一种面向汽车用低速网络的单主多从、异步串行总线标准,定位于需要互连但不需要强调实时性和可靠性的部件,作为CAN网络的补充和末梢。目标是以低廉的价格联接车上的传感器、执行器和处理器,并且允许不同厂家的模块随时添加进来。LIN目前不但用于多种型号的汽车上,而且日益广泛地用在智能传感器领域。 * LIN组织核心成员:5个车厂+1个半导体公司+1个测试工具公司。A(udi),B(M W),DC(戴克),V(olvo),VW(大众),Freescale和VCT(已并入Mentor Grap hics)。研、产、测、用一体化,这似乎是现代工业标准化的一种通行道路了。 * LIN规范 完全免费。 最新版本是2.0。2.0与1.3目前都被广泛采用,2.0可以兼容1.3,但反过来不行。 定义完整,对应OSI的下三层。入门阶段应该掌握下2层。 LIN规范包含6个模块,可以分“接口”、“通信协议”、“软件开发接口”和“开发语言”四个部分。入门阶段应该掌握“接口”和“通信协议”,了解“软件开发接口”。 * LIN的通信协议 基于状态机:FPGA或CPLD 基于单片机 Bit-Bang方法:就是用IO口线模拟异步串口。成本最低,但CPU负担最重,代码最多。 SCI+Timer方法:就是利用UART硬件和Timer组合。成本适中,CPU 负担减轻。 专门LIN模块:由功能完备的LIN模块完成通信。成本较高,CPU负担最轻,代码最少。 * LIN的接口 +12V 单端非平衡信号。最高通信速率20kbps。 主节点输入阻抗1K,从节点30K。 LIN总线学习手记2 1 推荐 * LIN的前生今世与来生 源自ISO9141;目前是LIN 2.0和1.3并行发展,很快就要兼容24V电源系统;未来可能会变成SAE J2602。 *LIN的竞争对手 按照SAE的分类法,10K以下是A类网,125K以上是C类网,中间是B类网。LIN属于A类和B类的过渡。 低速网络标准从来都是群雄并起,厂商、SAE行会和ISO组织分分合合,天下动荡。目前比较强势的标准有3:LIN、J2602和TTP/A。
LIN总线常识
.LIN总线常识 LIN(Local Interconnect Network)是一种低成本的串行通讯网络用于实现汽车中的分布式电子系统控制LIN 的目标是为现有汽车网络(例如CAN 总线)提供辅助功能因此LIN总线是一种辅助的总线网络在不需要CAN 总线的带宽和多功能的场合比如智能传感器和制动装置之间的通讯使用LIN 总线可大大节省成本LIN 技术规范中除定义了基本协议和物理层外还定义了开发工具和应用软件接口LIN 通讯是基于SCI(UART)数据格式采用单主控制器/多从设备的模式仅使用一根12V 信号总线和一个无固定时间基准的节点同步时钟线这种低成本的串行通讯模式和相应的开发环境已经由LIN 协会制定成标准LIN 的标准化将为汽车制造商以及供应商在研发应用操作系统降低成本。LIN 的主要特性是什么 1) 低成本基于通用UART 接口几乎所有微控制器都具备LIN 必需的硬件 2) 极少的信号线即可实现国际标准ISO9141 规定 3) 传输速率最高可达20Kbit/s 4) 单主控器/多从设备模式无需仲裁机制 5) 从节点不需晶振或陶瓷震荡器就能实现自同步节省了从设备的硬件成本 6) 保证信号传输的延迟时间 7) 不需要改变LIN 从节点的硬件和软件就可以在网络上增加节点 8) 通常一个LIN 网络上节点数目小于12 个共有64 个标志符 LIN 的通讯规则是什么 一个LIN 网络由一个主节点一个或多个从节点组成所有节点都有一个从通讯任务该通讯任务分为发送任务和接收任务主节点还有一个主发送任务 一个LIN 网络上的通讯总是由主发送任务所发起的主控制器发送一个起始报文该起始报文由同步断点同步字节消息标志符所组成相应的在接受并且滤除消息标志符后,一个从任务被激活并且开始本消息的应答传输该应答由2/4/8 个数据字节和一个校验码所组成起始报文和应答部分构成一个完整的报文帧怎样正确组成LIN 报文帧由报文标志符指示该报文的组成这种通讯规则可以用多种方式来交换数据由主节点到一个或多个从节点由一个从节点到主节点或其他的从节点通讯信号可以在从节点之间传播而不经过主节点或者主节点广播消息到网络中的所有节点报文帧的时序由主控制器控制 LIN 可用来实现什么样的应用 典型的LIN 总线应用是汽车中的联合装配单元如门方向盘座椅空调照明灯湿度传感器交流发电机等对于这些成本比较敏感的单元LIN 可以使那些机械元件如智能传感器制动器或光敏器件得到较广泛的使用这些元件可以很容易的连接到汽车网络中并得到十分方便的维护和服务在LIN 实现的系统中通常将模拟信号量用数字信号量所替换这将使总线性能优化 尽管LIN 最初的设计目的是用于汽车电子控制系统但LIN 也可广泛应用于工业自动化传感器总线大众消费电子产品中
LIN总线协议
编辑词条 LIN总线 什么是LIN? LIN(Local Interconnect Network)是一种低成本的串行通讯网络用于实现汽车中的分 布式电子系统控制LIN 的目标是为现有汽车网络(例如CAN 总线)提供辅助功能因此LIN 总线是一种辅助的总线网络在不需要CAN 总线的带宽和多功能的场合比如智能传感器和 制动装置之间的通讯使用LIN 总线可大大节省成本LIN 技术规范中除定义了基本协议和物理层外还定义了开发工具和应用软件接口 LIN 通讯是基于SCI(UART)数据格式采用单主控制器/多从设备的模式仅使用一根12V 信 号总线和一个无固定时间基准的节点同步时钟线 这种低成本的串行通讯模式和相应的开发环境已经由LIN 协会制定成标准LIN 的标准 化将为汽车制造商以及供应商在研发应用操作系统降低成本。 LIN 的主要特性是什么 低成本基于通用UART 接口几乎所有微控制器都具备LIN 必需的硬件
极少的信号线即可实现国际标准ISO9141 规定 传输速率最高可达20Kbit/s 单主控器/多从设备模式无需仲裁机制 从节点不需晶振或陶瓷震荡器就能实现自同步节省了从设备的硬件成本 保证信号传输的延迟时间 不需要改变LIN 从节点的硬件和软件就可以在网络上增加节点 通常一个LIN 网络上节点数目小于12 个共有6 4 个标志符 LIN 的通讯规则是什么 一个LIN 网络由一个主节点一个或多个从节点组成所有节点都有一个从通讯任务 该通讯任务分为发送任务和接收任务主节点还有一个主发送任务 一个LIN 网络上的通讯总是由主发送任务所发起的主控制器发送一个起始报文该起 始报文由同步断点同步字节消息标志符所组成相应的在接受并且滤除消息标志符后, 一个从任务被激活并且开始本消息的应答传输该应答由2/4/8 个数据字节和一个校验码所 组成起始报文和应答部分构成一个完整的报文帧
LIN总线技术解析与应用
10.16638/https://www.360docs.net/doc/268514630.html,ki.1671-7988.2018.21.049 LIN总线技术解析与应用 韩震,初洪超 (江淮汽车技术中心新技术研究院,安徽合肥230601) 摘要:汽车电子系统日益复杂。车载网络作为汽车通信和控制的基础,已成为汽车电子技术发展的趋势。目前应用最为广泛的是CAN总线。LIN总线作为汽车CAN 网络的一个功能补充,是一种低成本汽车总线系统。LIN规范、报文传送、通信规则等决定了其结构的灵活性,以及可为汽车网络中各节点提供相互的操作性。LIN总线在汽车电子中主要用于照明警示、电动车窗、车门等车身系统。以电动车窗为例,介绍LIN在汽车电子中的应用。 关键词:车载网络;LIN总线;汽车电子 中图分类号:U462 文献标识码:B 文章编号:1671-7988(2018)21-142-03 Application Of Lin Bus Technology And In Automotive Electronics Han Zhen, Chu Hongchao ( Technology Center, JAC, Anhui Hefei 230601 ) Abstract:Automobile electronic system becomes more and more complex. In vehicle network as the basis for vehicle communication and control, has become the development trend of automobile electronic technology. At present, the most widely used is the CAN bus. LIN bus as a function of automotive CAN network supplement, is a low cost vehicle bus system. The LIN specification, a message transmission, communication rules determine the structural flexibility, and can provide the operation between each node in the network for automobile. LIN bus in automotive electronics is mainly used for lighting warning, electric windows, doors and other body systems. The electric window as an example, this paper introduces LIN application in automotive electronics. Keywords: In Vehicle Network; LIN Bus; Automotive Electronics CLC NO.: U462 Document Code: B Article ID: 1671-7988(2018)21-142-03 引言 汽车车载网络技术是汽车技术高速发展的代表,是传统汽车技术和新兴计算机网络技术相互结合的结晶。车载网络技术在汽车电子控制系统中的作用越来越重要,它解决了现代汽车电子化中出现的线路复杂和线束增加的问题,同时也是汽车通信和控制的一个基础。目前在汽车上应用的车载网络基本情况见表1。1 CAN/LIN网络简介 CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。CAN被用在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN 控制装置。 LIN,全称为“Local Interconnect Network”,始创于1998年,由Audi、BMW 等7家汽车制造商及Motorola集成电路制造商联合提出,专为降低汽车成本而开发的一种总线 作者简介:韩震,就职于江淮汽车技术中心新技术研究院。 142
LIN总线学习手记
* LIN概况 LIN(Local Interconnect Network)是一种面向汽车用低速网络的单主多从、异步串行总线标准,定位于需要互连但不需要强调实时性和可靠性的部件,作为CAN网络的补充和末梢。目标是以低廉的价格联接车上的传感器、执行器和处理器,并且允许不同厂家的模块随时添加进来。LIN目前不但用于多种型号的汽车上,而且日益广泛地用在智能传感器领域。 * LIN组织核心成员 https://www.360docs.net/doc/268514630.html, 5个车厂+1个半导体公司+1个测试工具公司。A(udi),B(MW),DC(戴克),V(ol vo),VW(大众),Freescale和VCT(已并入Mentor Graphics)。研、产、测、用一体化,这似乎是现代工业标准化的一种通行道路了。 * LIN规范 完全免费。 最新版本是2.0。2.0与1.3目前都被广泛采用,2.0可以兼容1.3,但反过来不行。 定义完整,对应OSI的下三层。入门阶段应该掌握下2层。 LIN规范包含6个模块,可以分“接口”、“通信协议”、“软件开发接口”和“开发语言”四个部分。入门阶段应该掌握“接口”和“通信协议”,了解“软件开发接口”。 * LIN的通信协议 基于状态机:FPGA或CPLD 基于单片机 Bit-Bang方法:就是用IO口线模拟异步串口。成本最低,但C PU负担最重,代码最多。 SCI+Timer方法:就是利用UART硬件和Timer组合。成本适中,CPU负担减轻。 专门LIN模块:由功能完备的LIN模块完成通信。成本较高,C PU负担最轻,代码最少。 * LIN的接口 +12V 单端非平衡信号。最高通信速率20kbps。 主节点输入阻抗1K,从节点30K。
LIN总线和CAN总线
局域互联网络(LIN)标准是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。 解决方案1: CAN线是汽车数据总线是控制器局域网线用于控制单元和控制饭预案之间数据传输双线模式有高位线和低位线之分特点传输速率高抗干扰能力强根据用途分为有舒适性CAN线驱动CAN线诊断CAN线和仪表CAN线 LIN线是一种低成本串行通信网络线单线模式应用于不需要高速传输的汽车网络比如汽车门窗天窗雨刮等是为了减少成本代替CAN线用的属于辅助的数据传输线查看更多答案>> 解决方案2: 是上止线和下止线的意思。加注液体时在两线之间就可以了。是起点和终点。 是上止线和下止线的意思。加注液体时在两线之间就可以了。是起点和终点。 区别: 1.信号线及信号 CAN总线以CAN一High和CAN一历w两条信号线 (双绞线)工作,舒适CAN总线两条线的电平分别约为OV和5V(隐性时)。 LIN总线只以一条相当于CAN一忱如的信号线工作,隐性时电平接近电瓶电压,并随之浮动;显性时电平接近地电平。使用0·35mmz导线,颜色为紫底白线。 2·组件 CAN总线工作时,电子单元中除了需要相对复杂的收发器外,"通常还需要用专门的协议控制器。LIN总线单元中的收发器较简单,而且由于协议简单,通常不需要专门的协议控制器。 3·传输速率 CAN总线的位速率较高,在汽车中使用时通常为5OOkb/s,最低的也达到1OOkb/s。 LIN总线的最高位速率为2Okb/s,通常使用1920Ob/s或9600b/s的速率。 4·系统结构 CAN总线为多主机系统,即接人总线的任一电子单元都可通过总线仲裁来获取总线控制权,并向总线系统中发送信息,单元在发出完整的ID时即为主机。CAN总线使用11位 ID(甚至更多),在一个子系统中可有较多的单元。 LIN总线为单主机多从机系统,每一子系统中有且只有一个主机,所有的信息传送都由主机控制,从机必须等待主机发出了与它对应的ID后才能发送信息。LIN总线使用6位 ID,在一个子系统中只能有较少的单元。