代数与几何综合题(时间90分钟).

、选择题:
代数与几何综合题
(时间:90分钟)
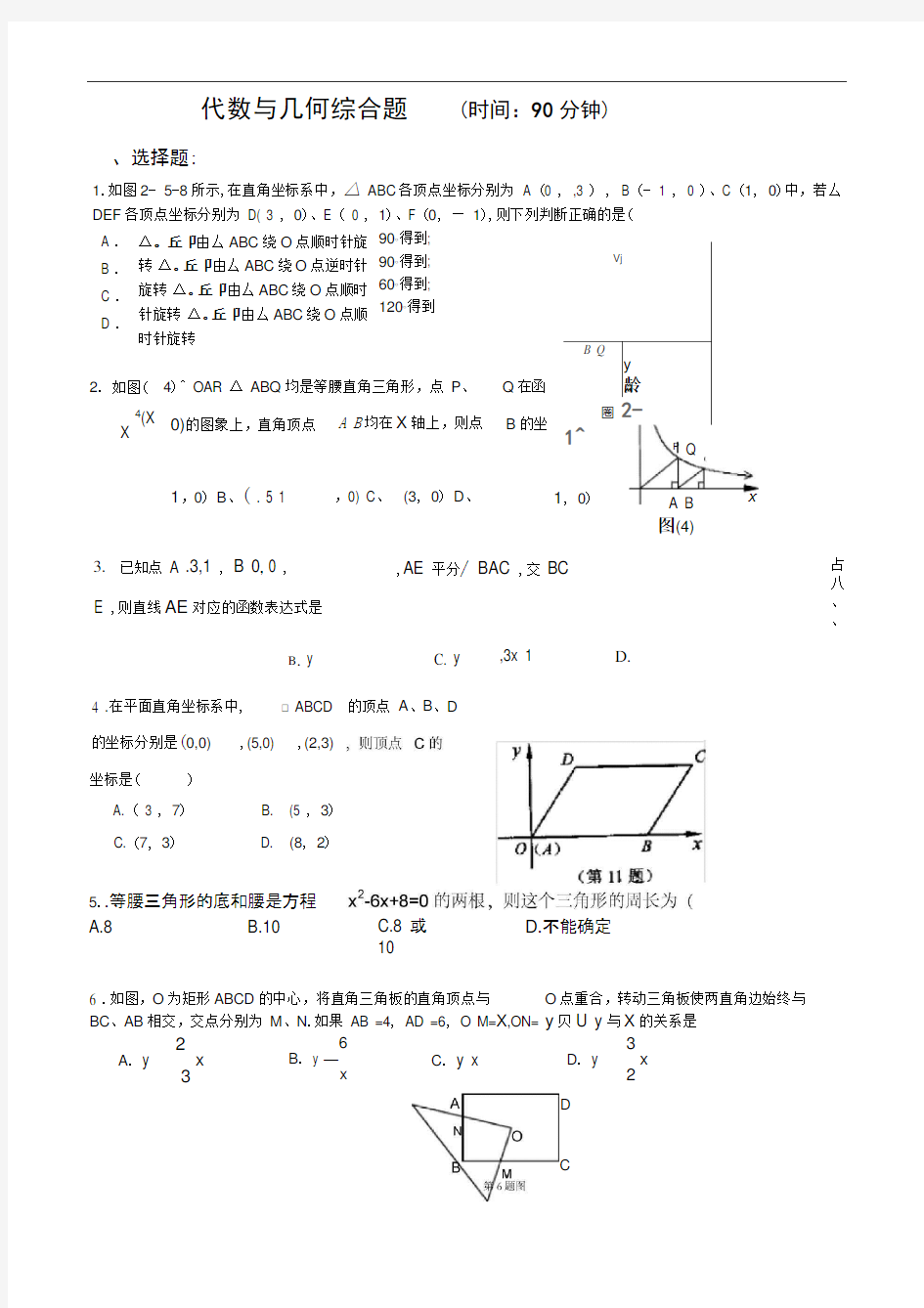
1.如图2- 5-8所示,在直角坐标系中,△ ABC 各顶点坐标分别为 A (0 , ,3 ) , B (- 1 , 0 )、C (1, 0)中,若厶DEF 各顶点坐标分别为 D( 3 , 0)、E ( 0 , 1)、F (0, — 1),则下列判断正确的是( A . B . C . D .
△。丘卩由厶ABC 绕O 点顺时针旋转 △。丘卩由厶ABC 绕O 点逆时针旋转 △。
丘卩由厶ABC 绕O 点顺时针旋转 △。丘卩由厶ABC 绕O 点顺
时针旋转 90°得到; 90°得到; 60°得到; 120°得到 2. 如图( 4(X X
4)^ OAR △ ABQ 均是等腰直角三角形,点 P 、 0)的图象上,直角顶点 A B 均在X 轴上,则点 B 的坐 Vj
B Q y 齡
圈 2-
1^
Q 在函
1,0) B 、(
. 5 1 ,0) C 、 (3, 0) D 、 1, 0) x
A B
图(4)
P Q
3. 已知点 A .3,1 , B 0,0 ,
,AE 平分/ BAC ,交 BC 占
八、、
E ,则直线AE 对应的函数表达式是 B . y
C. y ,3x 1
D.
4 .在平面直角坐标系中,
□ ABCD 的坐标分别是(0,0)
,(5,0) 坐标是( ) A. ( 3 , 7) B. C. (7, 3) D. 5..等腰三角形的底和腰是方程 A.8 B.10 的顶点 A 、B 、D ,(2,3) (5 , 3) (8, 2) C.8 或 10 D.不能确定 2 6 3 A . y
x
3
B . y —
x
C . y x
D . y
x 2
6 .如图,O 为矩形ABCD 的中心,将直角三角板的直角顶点与 O 点重合,转动三角板使两直角边始终与 BC 、AB 相交,交点分别为 M 、N .如果 AB =4, AD =6, O M=X ,ON= y 贝U y 与X 的关系是 D
C
A
O
x
C
B
)
F
A
10
10
D 5
75
75
P
Q
O '
10
出
5
A B
)则运动过程中所构 9
9
日
x(s)
x(s)
O
O
3 3 3 3 C
A
B
D
)
AED
D
E
B
A
O
BD 相交于E
A 、tan AED
E l
致
E 、 COt
cm 2
cm 2
10、如图所示,AB 是O O 的直径,弦 AC
x(s)-
O
(cm 2)与运动时间x (s )之间
的函
AC 4cm , BC 6cm ,动点 P 从点 C 沿 CA , C . D .
Q 从点C 沿CB ,以2cm/s 的速度向点B 运动,其中一个动点到达
x(s)
O
则CB 等于
9
)
(7题图)
8如图4 (单位:m ),直角梯形ABCD 以2 m/s 的速度沿直线l 向正方形CEFG 方向移动,直到AB 与FE 重合,直角梯形 ABCD 与正方形CEFG 重叠部分的面积 S 关于移动时间t 的函数图象可能是
9.如图,在 Rt A ABC 中,/ C 90°, A . B . 以1cm/s 的速度向点 A 运动,同时动点 B
10 C 图-
f
75
4
1 7.如图,反比例函数 y
—的图象与直线y —X 的交点为A , B ,过点A 作y 轴的平行线与过点 B
x
3
作x 轴的平行线相交于点 C ,贝U △
ABC 的面积为( )
A. 8
B. 6
C. 4
D. 2 A y
、填空题
BC , △ ABC 1 .如图所示,在等腰梯形ABCD中,DC // AB , AC丄BC , AC > 的面
积为2.3,且AC + BC = 2 , 3 1 ,那么此梯形中位线长为
2?如图,△ ABC中,AB AC,/ A 45o, AC的垂直平
分线分别交AB, AC于D, E两点,连接CD ?如果AD 1, 那么
tan/ BCD= __________ .
3 ?当k取不同整数时,经过第一、二、四象限的所有直线
y 2k 1 x k 2与坐标轴在第一象限围成一个多边形,这
个多边形的面积等于____________
4. 如图,已知A(1 , 0)、A2(1 , 1)、A s(-1 , 1)、
A4(-1 , -1)、A 5(2 , -1)、…。则点A2007,的坐标为
三、解答下列各题
1. 如图,已知平面直角坐标系中
三点 A (2, 0), B ( 0, 2), P (x,
0) (X 0),连结BP,过P点作
PC PB交过点A的直线a于点C( 2, y)
(1)求y与x之间的函数关系式;
(2)当x取最大整数时,求BC与PA的交点Q的坐标。
2?矩形OABC在直角坐标系中位置如图所示,A C 两点
2?矩形OABC在直角坐标系中位置如图所示,A C 两点
3
的坐标分别为 A (6, 0), C (0, 3),直线y=—x与BC边相交于点D.
4
(1)求点D的坐标;
(2)若抛物线y=ax2+bx经过D A两点,试确定此抛物线的表达式;
(3)P为x轴上方,(2)中抛物线上一点,求△ POA面积的最大值;
(4)设(2)中抛物线的对称轴与直线0D交于点M点Q为对称轴上一动点,以Q O M为顶点的三角形与△
OCD相似,求符合条件的Q点的坐标.
3、一张矩形纸片OABC平放在平面直角坐标系内,0为原点,点A在x的正半轴上,点C在y轴的正半轴上,
0A= 5, 0C= 4。
①求直线AC的解析式;
8 2
②若M为AC与B0的交点,点M在抛物线y - x kx上,求k的值;
5
③将纸片沿CE对折,点B落在x轴上的点D处,试判断点D是否在②的抛物线上,并说明理由。
4、如图,在正方形ABCD中, AB=2, E是AD边上一点(点E与点A, D不重合).BE的垂直平分线交AB于M
交DC于N
⑴设AE=x,四边形ADNM勺面积为S,写出S关于x的函数关系式;
(2) 当AE为何值时,四边形ADNM勺面积最大?最大值是多少?
5.
如图2 — 5-16,在矩形 ABCD 中,AB=10。 cm , BC=8cm .点P 从A 出发,沿
SD 路线运动,
至U D 停止;点Q 从D 出发,沿D^C ^B ^A
路线运动,到 A 停止,若点P 、点Q 同时出发,点P 的
速度为1cm/s ,点Q 的速度为2cm/s , a s 时点P 、点Q 同时改变速度,点 P 的速度变为bcm/s ,点Q 的 速度变为d cm/s ,图2 — 5— 17是点P 出发x 秒后△ APD 的面积0( cm 2)与x ( s )的函数关系图象; 图2— 5 — 18是点Q 出发xs 后面AQD 的面积S 2 (cm 2)与x (s )的函数关系图象. ⑴ 参照图2— 5— 17,求a 、b 及图中c 的值;
求d 的值;
设点P 离开点A 的路程为y#cm),点Q 到点A 还需走的路程为
y 2(cm),请分别写出动点 度后,y 1、y 2与出发后的运动时间 x (s )的函数解析式,并求出 当点Q 出发 s 时,点P 、点Q 在运动路线上相距的路程为
6. 在直角坐标系中,O O 1经过坐标原点 0,分别与x 轴正半轴、y 轴正半轴交于点 A 、B 。
12
3
(1)
如图,过点 A 作O O 1的切线与y 轴交于点C ,点O 到直线AB 的距离为 ,sin ABC -, 5 5
求直线AC 的解析式;
(2) 若O O 1经过点M (2, 2),设 BOA 的内切圆的直径为 d ,试判断d+AB 的值是否会发生变化, 如果不变,求出其值,如果变化,求其变化的范围。
P 、Q 改变速
P 、Q 相遇时x 的值. 25cm .
哈尔滨工业大学《代数与几何》期末试题和答案
哈尔滨工业大学《代数与几何》期末试题 (此卷满分50分) 注:本试卷中()R A 、'A 、* A 分别表示A 的秩,A 的转置矩阵、A 的伴随矩阵;E 表示单位矩阵. 一、填空题(每小题2分,共10分) 1.若4阶方阵A 的特征值为0,1,2,3,且A 与B 相似,则行列式2||+=B E . 2.过点(1,2,3)-,垂直于直线 456 x y z ==且平行于平面789100x y z +++=的直线方程为 . 3.设123,,ααα是3维欧氏空间的标准正交基,则模12322-+=ααα . 4.若A 为4阶方阵,且R (A )=3,则方程组0*=A X 的基础解系含 个线性无 关的解向量. 5.yOz 坐标面上的抛物线20z y x ?=?=? 绕y 轴旋转一周,所生成的旋转曲面的方程为 . 二、选择题(每小题2分,共10分) 1.设A 是n m ?矩阵,则线性方程组AX =b 有解的充分条件是 【 】 (A )()R m =A ; (B )A 的行向量组线性相关; (C )()R n =A ; (D )A 的列向量组线性相关. 2.二次型222 123123121323,,)f x x x tx tx tx x x x x x x =+++++(正定的充要条件为 【 】 (A )1t >; (B )0t >; (C )1t >-; (D )1 2 t > . 3.设462414, 26,41.848?????? ? ? ?=== ? ? ??????? A B C 则A 与B 【 】 (A )A 与C 相似且合同; (B )A 与B 相似且合同; (C )B 与C 相似且合同; (D )B 与C 相似但不合同. 4.设,αβ是4维非零列向量,T A E =+αβ,则在A 的特征值中,至少有 【 】 (A )1个1; ( B )2个1; ( C )3个1; ( D )4个1. 5.设1234,,,αααα是3维向量,则下列命题正确的为 【 】 (A )如果12,αα线性相关,34,αα线性相关,则1324,αααα++线性相关;
杠杆专项练习(含答案)
杠杆原理作图练习题 一、作图题 1、如图8所示,O 点为杠杆的支点,画出力F 的力臂,并用字母L 表示。 2、渔夫用绳子通过竹杠拉起渔网,如图14所示.请在图上画出 (1)绳子AB 对杆拉力F1的力臂L1. (2)渔网对杆的拉力F2的示意图及该力的力臂L2. 3、筷子是我国传统的用餐工具,它应用了杠杆的原理,如图所示,请你在右图中标出这根筷子使用时的支点O ,并画出动力F1和阻力臂L2。 # 5、如图所示,用一根硬棒撬一块石头,棒的上端A 是动力作用点。 (1)在图上标出:当动力方向向上时,杠杆的支点a ;当动力方向向下时,杠杆的支点b 。 (2)在杠杆上画出撬动石头动力F 为最小时的方向。 6、 (10·宿迁)为使杠杆ON 在图乙位置能保持 静止,需在M 点施加一个力F .画出物体A 对杆的拉力的力臂和在M 点对杆的最小拉力F 的示意图; 7、(10·百色)图是吊车吊起重物的情景,点O 是起重臂OB 的支点。请在图中作出F1、F2的力臂L 1、L2。 8、(10·茂名)(2分)如图所示,铡刀工作时的动力F1,O 为支点。请在图中作出动力臂L1和铡刀受到的阻力F2的示意图。 9、(10·河南)如图11所示,在课桌的C 点用最小的力把桌腿B 抬离地面,在抬起时 桌腿A 没有滑动,请在C 点画出这个力的示意图,并标出它的力臂l 。 10、(10·德州)如图所示,轻质杠杆可绕O 转动,杠杆上吊一重物G ,在力F 作用下杠杆静止在水平位置,l 为F 的力臂,请在图中作出力F 的示意图及重物G 所受重力的示意图。 11、如图所示,F1是作用在抽水机手柄A 点的动力,O 为支点,请在图中画出F1的力臂l1。 -
代数和几何相结合
代数和几何相结合 图形的认识,图形与证明,图形的变换,图形与坐标的设计有效变化空间与图形,这部分内容原来有四条线索:图形的认识,图形与证明,图形的变换,图形与坐标。 课程标准修订之后,在这个结构上也略有一定的变化,是三条线索,一个是叫图形的性质,一个是图形与证明,没有图形与证明,一个是图形与变换图形与坐标。第一个问题,在初中阶段,研究的图形有哪些 首先要整体把握要研究的对象,可能从这样几个角度来做一个划分,实际上是做一个分类,大家看可能是对所要认识的对象能够更清楚一些,第一个实际上对分类就是从为纬度上,一维图形,二维图形和三维图形,在第三学段这三维图形都包括了,比如点、线段、直线,这是一维图形,二维图形说就是三角形,四边形,三维图形,因为在初中阶段,虽然不研究立体几何,但实际上还是要初步的了解一些最基本的三维图形整体对的一种把握和认识,比如说柱体,包括球,包括一些锥,尤其在视图这个内容里边,可能还是要初步的了解这些图形,这是一个划分的纬度,从的维数上,一维、二维、三维。 另外还有一个,就是认识这些图形的角度,是直线形还是曲线形。角就是直线形的图形,还有一类曲线形,包括二维和三维的,比如说圆,球,包括锥体,曲线形,这是另外一个将图形划分类别的这样一个角度。还有一个角度,还可以把研究的图形分成基本图形和组合图形,那说基本图形,像这种三角形,四边形,三角形,可能是最基本的图形。 在研究图形的性质,从总的来讲是两类,一类是一个图形之间的,它的对象就是研究这个图形自身的之间的关系,另外一个就是研究图象间的,之间相互的关系。全等是研究很重要的对象,包括相似的关系,另外还有对称性等等的,这些都是在明确了对象之后,进一步要展开几何各种学习里边很重要的内容。 图形与几何里有一块内容是新增加进来的, 就是视图。视图也是认为培养学生空间观念很重要的载体,从刚才说对图形的认识这个角度怎么样看待对视图这块内容的理解。在认识视图的时候,支撑着视图最重要的一件事情就是投影,就是用投影来观察理解一个空间的图形,从整体到局部,然后从局部回到整体这样的一个支撑,数学上称之为投影。中心投影,平行投影,这些在数学里都是挺要紧的,比如说通常所说的中心投影,将来会是摄影的基础,平行投影是会涉及到几何的会更广泛一点,所以这个是通过视图来支撑着对这样一个关系的认识。同时又是空间想象力,或者几何直观能力,或者空间观念的一个重要的载体。 要研究的对象明确了,要研究什么也明确了,接下来就是如何来研究。其实几何不等于证明,但是演绎推理,当然在集合内容的研究过程当中,仍然也是比较重要的一个方法,实际上就是综合,综合几何的这种方法,或者说原来这种欧式几何演绎证明从公理出发,现在把它叫做基本事实出发,经过以三段论为主的方法,展开对图形性质的证明。还有一种方法,就是用变换的手段来认识图形,有平移,轴对称,还有旋转。 另外,就是认识图形的办法,用坐标,通过对点的刻划,进一步对图形的位置,包括它的其一些属性的刻划,当然这个仅仅是一个初步,到了高中还会继续学习,因此概括来讲,认识图形基本方法,一个是演绎的方法,一个是运动变换的方法,还有一个就是运用坐标的,有序数对刻划的三种方法。当然,在这三种方法里面,在初中阶段,在不同的内容里面,各有
杠杆原理及习题
一、杠杆平衡条件 1.一人挑担子,扁担AB 长1.6米。在A 端挂重物400牛,B 端挂重物600牛, 则人肩在离A 端____米处担子才能平衡。若使两边重物各减少100牛,人肩应向____端(选填“A ”、“B ”)移动才有可能保持平衡。 2.一根轻质杠杆,在左右两端分别挂在200牛和300牛的重物时,杠杆恰好平衡.若将两边物重同时减少50牛,则杠杆 ( ) A .左端下沉 B .右端下沉 C .仍然平衡 D .无法确定 3.如图所示,把一根均匀的米尺,在中点O 支起,两端各挂四个钩码和两个钩 码,恰好使米尺平衡,按下列方式增减钩码或移动钩码,下列几种方式仍能保持米尺平衡的是 A.两边各加一个钩码 B.两边钩码各向外移动一格 C.左边增加一个钩码,右边向外移动一格 D.左右两边的钩码各减少一个 4、如果作用在杠杆上的动力是100 N ,动力臂与阻力臂之比是5∶1,那么杠杆平衡时,阻力是_____N. 5、如图2所示,O 为杠杆的支点,在杠杆的右端B 点挂一重物。MN 是以A 为圆心的弧形导轨,绳的一端系在杠杆的A 点,另一端E 可以在弧形导轨上自由滑动。当绳的E 端从导轨的一端N 点向另一端M 点滑动的过程中,杠杆始终水平,绳AE 对杠杆拉力的变化情况是 A .一直变小 B .先变大,后变小 C .一直变大 D .先变小,后变大 6.如图7所示,杠杆的质量不计,在杆的a 点挂上重物,在O 点右侧b 点处挂上钩码。重物的质量及a 点到O 点的距离不变。要使杆保持水平,b 点挂钩码的个数(各个钩码质量相同)和b 点到O 点距离的关系图象图8中的是( ) 7、如图9所示的杠杆每小格的长度相等,质量不计,O 为支点,物体A 是边长为0.1m 的正立方体。当杠杆 右侧挂一个物体B 时,杠杆平衡,此时物体A 对水平 桌面的压强为300P a ;若物体B 向右移动1 小格,物图2 A B O M N E A C B b 点挂钩码的个数 D 图8 图7
集合---排列组合
职 高 数 学 单 元 测 试 集合---排列组合 (时间:100分钟,满分100分) 姓名________成绩__________ 一.填空:(每空2分,共38分) 1.从1,2,3,4,5中任选两数组成加法式子,共可组成______个不同的加法式子, 若组成无重复数字的二位数,则可组成_______个不同的二位数. 2.计算:0!+5!- C 62+P 62=____ 3.四人排成一列,甲只能站右边第一个位置,则有 种不同站法. 4.1,2,3,4,5中任取2数,可以组成______个两位偶数,如果数字可以重复, 则可组成________个两位偶数. 5.-8和-2的等比中项为________,等差中项为_______ 6.等比数列{a n }中S n =2n+1-2,则此数列的公比q=_________ 7.数列{a n }为等差数列,a n =2-3n 则S 10=__________ 8.集合A={0,1,2,3}的所有真子集有_______个. 9.已知a
代数与几何综合题(时间90分钟).
、选择题: 代数与几何综合题 (时间:90分钟) 1.如图2- 5-8所示,在直角坐标系中,△ ABC 各顶点坐标分别为 A (0 , ,3 ) , B (- 1 , 0 )、C (1, 0)中,若厶DEF 各顶点坐标分别为 D( 3 , 0)、E ( 0 , 1)、F (0, — 1),则下列判断正确的是( A . B . C . D . △。丘卩由厶ABC 绕O 点顺时针旋转 △。丘卩由厶ABC 绕O 点逆时针旋转 △。 丘卩由厶ABC 绕O 点顺时针旋转 △。丘卩由厶ABC 绕O 点顺 时针旋转 90°得到; 90°得到; 60°得到; 120°得到 2. 如图( 4(X X 4)^ OAR △ ABQ 均是等腰直角三角形,点 P 、 0)的图象上,直角顶点 A B 均在X 轴上,则点 B 的坐 Vj B Q y 齡 圈 2- 1^ Q 在函 1,0) B 、( . 5 1 ,0) C 、 (3, 0) D 、 1, 0) x A B 图(4) P Q 3. 已知点 A .3,1 , B 0,0 , ,AE 平分/ BAC ,交 BC 占 八、、 E ,则直线AE 对应的函数表达式是 B . y C. y ,3x 1 D. 4 .在平面直角坐标系中, □ ABCD 的坐标分别是(0,0) ,(5,0) 坐标是( ) A. ( 3 , 7) B. C. (7, 3) D. 5..等腰三角形的底和腰是方程 A.8 B.10 的顶点 A 、B 、D ,(2,3) (5 , 3) (8, 2) C.8 或 10 D.不能确定 2 6 3 A . y x 3 B . y — x C . y x D . y x 2 6 .如图,O 为矩形ABCD 的中心,将直角三角板的直角顶点与 O 点重合,转动三角板使两直角边始终与 BC 、AB 相交,交点分别为 M 、N .如果 AB =4, AD =6, O M=X ,ON= y 贝U y 与X 的关系是 D C
6资本成本和杠杆原理练习-答案
精品文档 你我共享 6 资金成本和杠杆原理 ——练习答案 一、单项选择题 1.某企业本期息税前利润为5000万元,本期实现利息费用为3000万元,则该企业的财务杠杆系数为( ) A .3 B .1.5 C .2 D . 2.5 1.答案:D [分析]财务杠杆系数=息税前利润÷(息税前利润-利息)=5000÷(5000-3000)=2.5 2.某公司按面值等价发行期限为5年的债券,债券面值为1000万元,票面利率为12%,发行费用率为3%,所得税率为33%,则债券资金成本为( ) A .12.37% B .16.45% C .8.29% D .8.04% 2.答案:C [分析]债券资金成本=B ·i·(1-T)÷[B 0(1-f)]=1000×12%×(1-33%)÷[1000×(1-3%)] =8.29% 3.下列关于经营杠杆系数的说法,正确的是( ) A .提高固定成本总额,能够降低企业的经营风险 B .在相关范围内,产销业务量变动率上升,经营风险加大 C .在相关范围内,经营杠杆系数与产销业务量变动率呈反方向变动 D .对于某一特定企业而言,经营杠杆系数是固定的,不随产销量的变动而变动 3.答案:C [分析]因经营杠杆系数=息税前利润变动率÷产销业务量变动率=M ÷(M-a ),可知提高固定成本总额,将增大经营杠杆系数,从而增大企业的经营风险;产销业务量变动率上升,经营杠杆系数降低,从而减小企业的经营风险。 4.下列项目中,同优先股成本成反比关系的是( ) A .优先股年股利 B .发行优先股总额 C .所得税税率 D .优先股筹资费率 4.答案:B [分析]由优先股成本的计算公式: 可知:优先股成本与优先股年股利成正比关系,与 发行优先股总额成反比关系;而所得税税率对其计算没有影响,优先股筹资费率与其成同方向变化。 5.比较资金成本法是根据( )来确定资金结构。 A .加权平均资金成本的高低 B .占比重大的个别资金成本的高低 C .债券的利息固定 D .债券利息可以在利润总额中支付,具有抵税效应 5.答案:A [分析]比较资金成本法是指企业在作出筹资决策之前,先拟定若干个备选方案,分别计算各方案加权平均的资金成本,并根据加权平均资金成本的高低来确定资金结构的方法。 6.某公司全部资本为120万元,负债比率为40%,负债利率10%,当销售额为100万元时,息税前利润为20万元,则该公司的财务杠杆系数为( ) A .1.25 B .1.32 C .1.43 D .1.56 6.答案:B [分析]财务杠杆系数=EBIT ÷(EBIT-I )=20÷(20-120×40%×10%)=1.32 7.某公司的经营杠杆系数为2,预计息税前利润将增长10%,在其他条件不变的情况下,销售量将增长 A .5% B .10% C .15% D .20% 7.答案:A [分析]经营杠杆系数=息税前利润变动率÷产销业务量变动率,销售时增长率=10%÷2=5% 8.对企业财务杠杆进行计量的最常用的指标是( ) A .息税前利润变动率 B .普通股每股利润变动率 C .财务杠杆系数 D .财务杠杆 8.答案:C [分析]对财务杠杆进行计量的最常用指标是财务杠杆系数。 9.某企业发行普通股1000万股,每股面值1元,发行价格为每股5元,筹资费率为4%,每年股利固定,为每股0.20元,则该普通股成本为( )% A .4 B .4.17 C .16.17 D .20 9.答案:B [分析]普通股成本=1000×0.20÷[1000×5×(1-4%)]=4.17 10.在个别资本成本的计算中,不必考虑筹资费用影响因素的是( ) C A.长期借款成本 B.债券成本 C.留存收益成本 D .普通股成本 11.下列项目中,同优先股资本成本成反比例关系的是( )D A.优先股年股利 B.所得税税率 C.优先股筹资费率 D .发行优先股总额 12.一般来说,在企业的各种资金来源中,资本成本最高的是( )B A.优先股 B.普通股 C.债券 D .长期银行借款 13.公司增发普通股的市价为12元/股,筹资费率为市价的6%,本年发放的股利为0.6元/股,已知同类股票的预计收益率为11%,则维持此股价需要的股利年增长率为( ) C A.5% B.5.39% C..5.68% D .10.34% 解:K=D1/P (1-F )+G G=K- D1/P (1-F )=11%-0.6/12(1-6%)=5.7% 14.某公司股票目前发放的股利为每股2.5元,股利按10%的比例固定增长。据此计算的普通股资本成本为18%,则该股票目前的市价为( ) B A.34.375 B.31.25 C.30.45 D .35.5 解:K=D1/P (1-F )+G ) 1(0f P D K p -=
排列组合公式(全)教程文件
排列组合公式(全)
排列组合公式 排列定义从n个不同的元素中,取r个不重复的元素,按次序排列,称为从n个中取r个的无重排列。排列的全体组成的集合用 P(n,r)表示。排列的个数用P(n,r)表示。当r=n时称为全排列。一般不说可重即无重。可重排列的相应记号为 P(n,r),P(n,r)。 组合定义从n个不同元素中取r个不重复的元素组成一个子集,而不考虑其元素的顺序,称为从n个中取r个的无重组合。 组合的全体组成的集合用C(n,r)表示,组合的个数用C(n,r)表示,对应于可重组合 有记号C(n,r),C(n,r)。 一、排列组合部分是中学数学中的难点之一,原因在于 (1)从千差万别的实际问题中抽象出几种特定的数学模型,需要较强的抽象思维能力; (2)限制条件有时比较隐晦,需要我们对问题中的关键性词(特别是逻辑关联词和量词)准确理解; (3)计算手段简单,与旧知识联系少,但选择正确合理的计算方案时需要的思维量较大; (4)计算方案是否正确,往往不可用直观方法来检验,要求我们搞清概念、原理,并具有较强的分析能力。 二、两个基本计数原理及应用
(1)加法原理和分类计数法 1.加法原理 2.加法原理的集合形式 3.分类的要求 每一类中的每一种方法都可以独立地完成此任务;两类不同办法中的具体方法,互不相同(即分类不重);完成此任务的任何一种方法,都属于某一类(即分类不漏) (2)乘法原理和分步计数法 1.乘法原理 2.合理分步的要求 任何一步的一种方法都不能完成此任务,必须且只须连续完成这n步才能完成此任务;各步计数相互独立;只要有一步中所采取的方法不同,则对应的完成此事的方法也不同 例1:用1、2、3、4、5、6、7、8、9组成数字不重复的六位数 集合A为数字不重复的九位数的集合,S(A)=9!
排列与组合的综合应用.
高三数学(理一轮复习—— 10.3排列与组合的综合应用 教学目标:1. 进一步加深对排列、组合意义理解的基础上,掌握有关排列、组合综合题的基本解 法,提高分析问题和解决问题的能力,学会分类讨论的思想. 2. 使学生掌握解决排列、组合问题的一些常用方法。 教学重点:排列组合综合题的解法。教学过程: 一.主要知识: 解排列组合问题,首先要弄清一件事是“分类”还是“分步”完成,对于元素之间的关系, 还要考虑“是有序”的还是“无序的” ,也就是会正确使用分类计数原理和分步计数原理、排列定义和组合定义,其次,对一些复杂的带有附加条件的问题,需掌握以下几种常用的解题方法: 1.特殊优先法:对于存在特殊元素或者特殊位置的排列组合问题,我们可以从这些特殊的东西入手,先解决特殊元素或特殊位置,再去解决其它元素或位置,这种解法叫做特殊优先法。 2.科学分类法:对于较复杂的排列组合问题,由于情况繁多,因此要对各种不同情况,进行 3.分配、分组(堆问题的解法: 4. 插空法 :解决一些不相邻问题时, 可以先排一些元素然后插入其余元素, 使问题得以解决。 5.捆绑法:相邻元素的排列,可以采用“整体到局部”的排法,即将相邻的元素当成“一个” 6.排除法:从总体中排除不符合条件的方法数,这是一种间接解题的方法 . 7.剪截法(隔板法 :n 个相同小球放入m(m≤ n 个盒子里 , 要求每个盒子里至少有一个小球
的放法等价于 n 个相同小球串成一串从间隙里选 m-1个结点剪成 m 段 (插入 m -1块隔板 , 有 11 --m n C 种方法 . 8. 错位法:编号为 1至 n 的 n 个小球放入编号为 1到 n的 n 个盒子里 , 每个盒子放一个小球 . 要求小球与盒子的编号都不同 , 这种排列称为错位排列 . 特别当 n=2,3,4,5时的错位数各为 1,2,9,44.2个、 3个、 4个元素的错位排列容易计算。关于 5个元素的错位排 列的计算,可以用剔除法转化为 2个、 3个、 4个元素的错位排列的问题: ① 5个元素的全排列为:5 5120A =; ②剔除恰好有 5对球盒同号 1种、恰好有 3对球盒同号 (2个错位的 351C ?种、恰好有 2对球盒同号 (3个错位的 252C ?种、恰好有 1对球盒同号 (4个错位的 1 59C ?种。 ∴ 120-1-351C ?-252C ?-1 59C ?=44. 用此法可以逐步计算:6个、 7个、 8个、……元素的错位排列问题。 二.典例分析 【题型一】“分配” 、“分组”问题 例 1.将 6本不同的书按下列分法,各有多少种不同的分法? ⑴分给学生甲 3 本,学生乙 2本,学生丙 1本;
物理杠杆习题及答案
一、作图题 1、如图8所示,O点为杠杆的支点,画出力F的力臂,并用字母L表示。 2、渔夫用绳子通过竹杠拉起渔网,如图14所示.请在图上画出 (1)绳子AB对杆拉力F1的力臂L1. (2)渔网对杆的拉力F2的示意图及该力的力臂L2. 3、筷子是我国传统的用餐工具,它应用了杠杆的原理,如图所示,请你在右图中标出这根筷子使用时的支点O,并画出动力F1和阻力臂L2。 4、画出图中各力的力臂 5、如图所示,用一根硬棒撬一块石头,棒的上端A是动力作用点。 (1)在图上标出:当动力方向向上时,杠杆的支点a ;当动力方向向下时,杠杆的支点b。 (2)在杠杆上画出撬动石头动力F为最小时的方向。 6、(10·宿迁)为使杠杆ON在图乙位置能保持静止,需在M点施加一个力F.画出物体A对杆的拉力的力臂和在M点对杆的最小拉力F的示意图; 7、(10·百色)图是吊车吊起重物的情景,点O是起重臂OB的支点。请在图中作出F1、F2的力臂L 1、L2。 8、(10·茂名)(2分)如图所示,铡刀工作时的动力F1,O为支点。请在图中作出动力臂L1和铡刀受到的阻力F2的示意图。 9、(10·河南)如图11所示,在课桌的C点用最小的力把桌腿B抬离地面,在抬起时桌腿A没有滑动,请在C点画出这个力的示意图,并标出它的力臂l。 10、(10·德州)如图所示,轻质杠杆可绕O转动,杠杆上 吊一重物G,在力F作用下杠杆静止在水平位置,l为F 的力臂,请在图中作出力F的示意图及重物G所受重力的 示意图。 11、如图所示,F1是作用在抽水机手柄A点的动力,O 为支点,请在图中画出F1的力 臂l1。
12、利用钓鱼竿钓鱼的示意图如图所示,O为支点,F1是手对鱼竿的作用力,请画出:鱼线对钓鱼竿拉力F2的示意图;(2)F1的力臂。 13、榔头起钉子,请在图中画出动力F1的力臂L1,以及阻力和阻力臂。 14、如图所示,曲杠杆AOBC自重不计,O为支点,要使杠杆在图示位置平衡,请作出作用在C点最小的力F的示意图及其力臂L1. 15、如上右图所示,杠杆OA在力F1、F2的作用下处于静止状态,L2是力F2的力臂.在图中画出力F1的力臂L1. 16、⑴如图所示,一把茶壶放在水平桌面上,请画出茶壶所受的重力G的示意图。 ⑵如图所示的茶壶在倒茶时相当于一个杠杆,现以O为支点,在A点处提壶耳向杯中倒水,请画出作用在A点的最小的动力F 及其对应的力臂l。 17、图是使用道钉撬的示意图,请在图中画出最省力的力的示意图,并作出相应的力臂。 18、如图所示,画出使杠杆平衡的最小力的示意图(要求保留作图痕迹) 19、如图所示,请画出撬图钉时的动力臂和阻力臂。 20、轻质杠杆OA在水平位置平衡,请在图中作出动力臂L1及阻力F2。 21、如图所示,均匀杆可绕O转动,在力F作用下静止在水平位置,L为F的力臂,请在图中作出杆重力G示意图和力F的方向。 二、实验,探究题 22、小明探究“杠杆平衡条件”的步骤: (1)实验中首先要调节杠杆两端的平衡螺母,其作用是调节杠杆位置平衡,这样做便于测量.若发现杠杆左端下倾,可将右端螺母向边旋转 . (2)下面是小明的实验记录: 实验序号动力F1/N 动力臂l1/m 阻力F2/N 阻力臂 l2/m 1 2 0.2 1 0.1 2 1 0.08 2 0.04 这两组数据中,实验序号为的一组数据肯定是错误的.经检查,发现是测量动力臂时读错了,实际值比记录值?(选填:“大”或“小”);通过探究,应该得出的结论是:. 23、某小组同学研究杠杆平衡的特点,他们先用弹簧测力计测出三个钩码的重力,如图(a)所示,然后将它们挂在已调节水平平衡的杠杆A点位置上,再用测力计在杠杆B点沿竖直方向用力使杠杆保持平衡,如图(b)所示,接着在保持杠
九年级数学代数和几何的综合专题
精典专题七代数与几何的综合问题 一、探究与证明 【例1】【问题情境】 如图1,四边形ABCD是正方形,M是BC边上的一点,E是CD边的中点,AE平分∠DAM. 【探究展示】 (1)证明:AM=AD+MC; (2)AM=DE+BM是否成立?若成立,请给出证明;若不成立,请说明理由. 【拓展延伸】 (3)若四边形ABCD是长与宽不相等的矩形,其他条件不变,如图2,探究展示(1)、(2)中的结论是否成立?请分别作出判断,不需要证明.
二、探究与计算 【例2】(盐城)(12分)【问题情境】张老师给爱好学习的小军和小俊提出这样一个问题:如图1,在△ABC 中,AB=AC ,点P 为边BC 上的任一点,过点P 作PD⊥AB,PE⊥AC,垂足分别为D 、E ,过点C 作CF⊥AB,垂足为F .求证:PD+PE=CF . 小军的证明思路是:如图2,连接AP ,由△ABP 与△ACP 面积之和等于△ABC 的面积可以证得:PD+PE=CF . 小俊的证明思路是:如图2,过点P 作PG⊥CF,垂足为G ,可以证得:PD=GF ,PE=CG ,则PD+PE=CF . 【变式探究】如图3,当点P 在BC 延长线上时,其余条件不变,求证:PD ﹣PE=CF ; 请运用上述解答中所积累的经验和方法完成下列两题: 【结论运用】如图4,将矩形ABCD 沿EF 折叠,使点D 落在点B 上,点C 落在点C′处,点P 为折痕EF 上的任一点,过点P 作PG⊥BE、PH⊥BC,垂足分别为G 、H ,若AD=8,CF=3,求PG+PH 的值; 三、坐标与几何 例3.如图,抛物线y=2 1(x-3)2-1与x 轴交于A ,B 两点(点A 在点B 的左侧),与y 轴交于点C ,顶点为D . (1)求点A ,B ,D 的坐标; (2)连接CD ,过原点O 作OE ⊥CD ,垂足为H ,OE 与抛物线的对称轴交于点E ,连接AE ,AD ,求证:∠AEO=∠ADC ; (3)以(2)中的点E 为圆心,1为半径画圆,在对称轴右侧的抛物线上有一动点P ,过点P 作⊙E 的切线,切点为Q ,当PQ 的长最小时,求点P 的坐标,并直接写出点Q 的坐标.
杠杆原理习题
杠杆原理习题 TTA standardization office【TTA 5AB- TTAK 08- TTA 2C】
杠杆原理习题精选 一、选择题 1.关于使用杠杆时用力,下列说法正确的是() A.用动力臂长的杠杆省力 B.用阻力臂长的杠杆费力 C.用动力臂小于阻力臂的杠杆,省力 D.用阻力臂大于动力臂的杠杆,费力 2.下列说法中,正确的是() A.杠杆是一种省力的机械 B.托盘天平是一种等臂杠杆,杆秤是不等臂杠杆 C.从支点到力的作用点之间的距离,叫做力臂 D.杠杆的长度总是等于动力臂与阻力臂之和 3.下列杠杆类工具中,不省力的是() A.铡刀 B.镊子 C.剪铁皮的剪子 D.扳手 4.一架天平的横梁左右不等,某同学发现右边横梁较长,用它测得物体的质量() A.偏大 B.偏小 C.不受影响 D.无法判断 5.一个杆秤,如果秤砣被磨损掉一部分,则它称得的质量比被称物体的实际质量将() A.变小 B.变大 C.相等 D.无法判定 6.一把杠秤,它的刻度是准确的如果增加杆秤的锤重去称量物体,那么它的读数将() A.与实际质量相同 B.比实际质量大
C.比实际质量小 D.以上都有可能 7.下列哪些应用属于费力杠杆() A.手握钢笔写字? B.汽水瓶起盖器的作用 C.用筷子夹菜 D.用大扫帚扫地 8.下列哪些应用属于费力杠杆() A.手握钢笔写字 B.汽水瓶起盖器的使用 C.用筷子夹菜 D.用大扫帚扫地 9.如图所示,甲、乙两容器质量相等,先把等量的水倒入两容器中,再把它们放在调好的天平左、右盘上,则() A.两容器对天平盘的压强相等,天平平衡 B.两容器对天平盘的压强虽不相等,但天平平衡 C.两容器对天平盘的压强不相等,天平不平衡 D.乙容器底受到的压强大,天平平衡 10.下列杠杆中属于省力杠杆的是() A.镊子 B.钳子 C.钓鱼杆 D.缝纫机的脚踏板 11.人用棒挑着重物扛在肩上行走时,在下图所示的各种方法中,胳膊用力最小的是() 12.利用如下图所示的质量不计的杠杆提升重物G,动力作用在A点,那么,使用它() A.一定是省力杠杆?B.一定是费力杠杆 C.不可能是等臂杠杆?D.可以是等臂杠杆 13.如下图所示杆秤是称量质量的工具。当秤砣磨损一部分,用它称质量,结果比被称物体的真实质量()
杠杆难题带答案全解
杠杆难题 一、选择题 1、在已调节平衡的杠杆左边距离支点40 cm处挂上总重为3 N的钩码,用弹簧测力计勾在右边距离支点30cm处,以不同的方向拉着杠杆右端使杠杆水平平衡,如图3所示。两次测力计的示数 A.甲示数为13 N B.乙示数为3 N C.甲乙示数相同D.乙示数比甲大 2、如右图所示,古人将一硬棒(质量忽略不计)悬挂在树枝上,绳对杆的动力F1 使杆绕0点发生转动,提起水桶,下列说法正确的是() A.阻碍杆转动的阻力是水和水桶的总重力B.阻碍杆转动的阻力是绳对杆(B 点)的拉力 C.杆转动过程中,动力臂始终是OAD.此杠杆是费力杠杆 3、一根直杆可以绕O点转动,在直杆的中点挂一个重为G的重物,在杆的另一端施加一个力F,如图所示,在力F从水平方向缓慢转动到沿竖直向上的方向过程中,为使直杆保持在图示位置平衡,则拉力F的变化情况是() A.一直变大 B.一直变小C.先变大,后变小 D.先变小,后变大 4、如图所示的工具中属于费力杠杆的一组是() A.①② B.②③C.②④ D.③④ 5、2015 年11 月21 日,恒大队在主场以1 : 0 获得2015 赛季亚冠联赛冠军。现场直播时采用的是如图所示的摇臂摄像技术工作时的情景,下列有关摇臂摄像的说法正确的是() A.摇臂摄像的整个支架其实是个省力杠杆 B.摇臂摄像的整个支架其实是个省距离杠杆 C.如图所示的L2是摇臂摄像支架的阻力臂 D.摄像师用一个垂直于杠杆的力F 把支架从虚线位置移动到图中所示位置的过程中,力F 变大 6、为了探究杠杆的平衡条件,物理老师带来了一个自制杠杆AB.从其上找一点C用支架支起来,如图所示,当小强依次在枉杆上的A1、A2、A等各点施加一个向下的力时,发现越来越容易提起水桶.根据这一实验现象大家提出的以下四个问题.其中最有探究价值且易于探究的科学问题是()
排列 组合 定义 公式 原理
排列组合公式 久了不用竟然忘了 排列定义从n个不同的元素中,取r个不重复的元素,按次序排列,称为从n个中取r个的无重排列。排列的全体组成的集合用 P(n,r)表示。排列的个数用P(n,r)表示。当r=n时称为全排列。一般不说可重即无重。可重排列的相应记号为 P(n,r),P(n,r)。 组合定义从n个不同元素中取r个不重复的元素组成一个子集,而不考虑其元素的顺序,称为从n个中取r个的无重组合。 组合的全体组成的集合用C(n,r)表示,组合的个数用C(n,r)表示,对应于可重组合 有记号C(n,r),C(n,r)。 一、排列组合部分是中学数学中的难点之一,原因在于 (1)从千差万别的实际问题中抽象出几种特定的数学模型,需要较强的抽象思维能力; (2)限制条件有时比较隐晦,需要我们对问题中的关键性词(特别是逻辑关联词和量词)准确理解; (3)计算手段简单,与旧知识联系少,但选择正确合理的计算方案时需要的思维量较大; (4)计算方案是否正确,往往不可用直观方法来检验,要求我们搞清概念、原理,并具有较强的分析能力。 二、两个基本计数原理及应用 (1)加法原理和分类计数法 1.加法原理 2.加法原理的集合形式
3.分类的要求 每一类中的每一种方法都可以独立地完成此任务;两类不同办法中的具体方法,互不相同(即分类不重);完成此任务的任何一种方法,都属于某一类(即分类不漏) (2)乘法原理和分步计数法 1.乘法原理 2.合理分步的要求 任何一步的一种方法都不能完成此任务,必须且只须连续完成这n步才能完成此任务;各步计数相互独立;只要有一步中所采取的方法不同,则对应的完成此事的方法也不同 例1:用1、2、3、4、5、6、7、8、9组成数字不重复的六位数 集合A为数字不重复的九位数的集合,S(A)=9! 集合B为数字不重复的六位数的集合。 把集合A分为子集的集合,规则为前6位数相同的元素构成一个子集。显然各子集没有共同元素。每个子集元素的个数,等于剩余的3个数的全排列,即3! 这时集合B的元素与A的子集存在一一对应关系,则 S(A)=S(B)*3! S(B)=9!/3! 这就是我们用以前的方法求出的P(9,6) 例2:从编号为1-9的队员中选6人组成一个队,问有多少种选法? 设不同选法构成的集合为C,集合B为数字不重复的六位数的集合。把集合B分为子集的集合,规则为全部由相同数字组成的数组成一个子集,则每个子集都是某6个数的全排列,即每个子集有6!个元素。这时集合C的元素与B的子集存在一一对应关系,则 S(B)=S(C)*6! S(C)=9!/3!/6! 这就是我们用以前的方法求出的C(9,6) 以上都是简单的例子,似乎不用弄得这么复杂。但是集合的观念才是排列组合公式的来源,也是对公式更深刻的认识。大家可能没有意识到,在我们平时数物品的数量时,说1,2,3,4,5,一共有5个,这时我们就是在把物品的集合与集合(1,2,3,4,5)建立一一对应的关系,正是因为物品数量与集合(1, 2,3,4,5)的元素个数相等,所以我们才说物品共有5个。我写这篇文章的目的是把这些潜在的思路变得清晰,从而能用它解决更复杂的问题。 例3:9个人坐成一圈,问不同坐法有多少种?
组合的综合应用
组合的综合应用 探究点1 有限制条件的组合问题 课外活动小组共13人,其中男生8人,女生5人,并且男、女生各有一名队长,现从中选5人主持某项活动,依下列条件各有多少种选法? (1)至少有一名队长当选. (2)至多有两名女生当选. (3)既要有队长,又要有女生当选. 【解】 (1)至少有一名队长含有两种情况:有一名队长和两名队长,故共有C12·C411+C22·C311=825种.或采用排除法有C513-C511=825种. (2)至多有两名女生含有三种情况:有两名女生、只有一名女生、没有女生,故共有C25·C38+C15·C48+C58=966种. (3)分两种情况: 第一类:女队长当选,有C412种; 第二类:女队长不当选, 有C14·C37+C24·C27+C34·C17+C44种. 故共有C412+C14·C37+C24·C27+C34·C17+C44=790种. [变问法]在本例条件下,至多有1名队长被选上的方法有多少种? 解:分两类情况: 第一类:没有队长被选上,从除去两名队长之外的11名学生中选取5人有C511=462种选法.第二类:一名队长被选上,分女队长被选上和男队长被选上,不同的选法有:C411+C411=660种选法. 所以至多1名队长被选上的方法有462+660=1 122 种. 有限制条件的组合问题分类 有限制条件的抽(选)取问题,主要有两类: 一是“含”与“不含”问题,其解法常用直接分步法,即“含”的先取出,“不含”的可把所指元素去掉再取,分步计数; 二是“至多”“至少”问题,其解法常有两种解决思路:一是直接分类法,但要注意分类要不重不漏;二是间接法,注意找准对立面,确保不重不漏. 1.若从1,2,3,…,9这9个整数中取4个不同的数,使其和为奇数,则不同的取法共有( ) A.60种B.63种
初中物理杠杆画图题练习(含答案)
作图题 1.请标明图中杠杆的支点: 2.用图所示的杠杆提起重物.O是杠杆的支点,在A 点用力,在图中画出力F的力臂,并用字母G表示. 3.画出图中各力的力臂: 4.如图中均匀直棒OA可绕O点转动,请分别画出水平拉力F和重力G的力臂. 5.如图为用起子开汽水瓶盖的时候,杆的支点O位置,及手作用在起子上力的力臂.请在图中表示. 6.试在图上画出F1和F2的力臂 7.在右图中画出力F对支点O的力臂,并用字母G 表示. 8.下图中的铡刀属于杠杆,试画出它的动力臂和阻力臂. 9.画出并标明图中F、G对支点O的力臂. 10.画出图中各力的力臂. 11.画出图中F1和F2的力臂G1和G2. 12.画出图中杠杆所受各力对于点O的力臂(不计杠杆所受的重力) 13.图中杠杆所受的重力G和拉力F的力臂. 14.试在图中画出汽车刹车踏板上动力F1的力臂G1 和阻力F2的力臂G2.
15.画出图中,加在杠杆上的动力F的力臂. 16.如图所示,试画出杠杆OA所受力的力臂(OA杆的质量忽略不计) 17.图中,均匀直棒AB可绕A点转动,在B端加一竖直向上的40牛顿的力F,整个装置处于静止状态,试作出该棒所受重力的图示及重力的力臂. 18.画出图中力F1和F2的力臂,并用G1和G2分 别标明. 19.画出图中杠杆所受各力对于支点O的力臂(不计杠杆所受重力) 20.在图所示的各杠杆中,O是支点,试分别画出F1,F2的力臂G1,G2. 21.下列所示的杠杆中,O是支点,在图上画出F1、F2的力臂,并且用G1、G2表示它 们. 22.画出下列各力的力臂(如图) 23.画出下列各力的力臂(如图) 24.如图中的点O是杠杆的支点,画出力F1和F2的力臂,并用字母G1和G2标明. 25.画出图中F1和F2的力臂.
《代数与几何前言》翻译
Before these methods are discussed, some background remarks on representations are needed. Two primary approaches to the representation of quadric surfaces have evolved; an algebraic one and a geometric one [4]. The algebraic approach is summarized in Section 2 and is characterized by the representation of all quadric surfaces in a single form. A single surface-surface intersection algorithm suffices in this approach. The geometric approach contrasts with the algebraic one primarily in that surfaces are type-dependent combinations of scalars, points, and vectors, and algorithms for surface-surface intersections are dependent upon the types of surfaces involved[4, 7, 12]. A number of problems exist with the exclusive use of the algebraic approach. These are well documented [4, 7, 15]. Indeed, the discovery of these problems in practice led to the development and use of the geometric approach. The problems relate primarily to a lack of numerical robustness, and we amplify on some of the in Section 2 after we have developed some requisite background material. Although geometric approaches work well when conic sections arise [5, 12], adequate methods based on these approaches when nonplanar intersecton curves result have not been described in the literature. Therefore, it has been suggested that geometric approaches be used to detect and describe conic sections when they arise, and that algebraic ones be used only after it has been determined that a nonplanar curve will result [12]. In this paper we describe how geometric approaches can be used for nonplanar intersections as well, and we note several advantages that arise from using these approaches. We consider here only the so-called natural quadrics[7], that is, the sphere, cylinder, cone, and plane. These are by far the most commonly occurring quadric surfaces used in modeling mechanical objects. The methods described herein can be employed with many of the remaining quadrics as well. As we observe later, however, some additional techniques will be needed for some of them, and there may well come a point at which a purely geometric approach ceases to be practical or even possible. 在讨论上述方法之前,有必要提及一些关于表示方法的背景知识。数学史至今已发展出两种表示二次曲面的主要方法:代数与几何【4】,代数方法在第二节有所总结,其特点是所有二次曲面均可由一种单一形式表示,在这种方法下,一个单一的面面相交算法就足够了。而几何方法正好相反,主要在于面的表示依赖于标量,点和向量的组合,并且面面相交的算法依面的类型而定【4,7,12】。 在单独使用代数方法时出现了一些问题,这些都有详细记录【4,7,15】。实际上,正是这些在实践过程中发现的问题引领了几何方法的发展和使用。这些问题主要是缺乏数值的稳定性,在取得了一些必备的背景材料后我们在第二节对这些问题的一部分进行细致分析。 尽管几何方法在圆锥曲面出现的场合中表现很好【5,12】,但当遇到非平面相交曲线时,基于这一方法的手段在这一文献中并不充分。因此,有建议说,在圆锥截面情况下,应当使用几何方法检测和描述它们,除此之外,只有当预知结果会是非平面曲线时,才应该使用代数方法【12】。在本文中,我们也会描述几何方法是如何解决非平面相交问题的,并且,我们强调了使用这些方法的一些优点。 本文中,我们只考虑所谓的自然二次曲面【7】,也就是球面、圆柱、圆锥和平面。这些 是目前为止在机械物体建模中最常见的二次曲面。这里描述的方法也可应用于很多其他类型的二次曲面。然而,我们后来发现,这些曲面中有一些需要引用额外手法,此外,有可能出