基于M_BUS的超低功耗数据采集系统
基于M BUS 的超低功耗数据采集系统
■太原科技大学 刘立群 孙志毅
摘 要
介绍一种基于超低功耗单片机的数据采集系统的设计与实现;具体阐述该系统的工作原理、主要特点、总
体设计、硬件电路和软件流程设计。该系统以TI 公司的16位Flash 型MSP430Fx44x 系列单片机为核心,以根据韦根德效应制成的零功耗磁敏传感器作为采集前端,选用M BUS 总线进行数据传输,适用于远传抄表的数据采集。
关键词
超低功耗 数据采集 单片机 M BUS 总线
引 言
随着社会的迅速发展,智能小区逐渐进入人们的生活,而自动抄表系统是智能小区的重要功能之一。在水、
电、气管理方面,采用自动抄表技术,不仅能节约人力资源,更重要的是可提高抄表的准确性,减少因估计或誊写而造成帐单出错的现象,使水、电、气管理部门能及时准确获得数据信息。另外用户不再需要与抄表者预约上门抄表时间,还能迅速查询帐单,所以这种技术越来越受到用户欢迎。
针对目前市场上自动抄表系统价格不菲的现状,设计一种由零功耗磁敏传感器产生脉冲信号,利用MSP430系列超低功耗单片机的捕获功能捕获信号的数据采集系统。该采集系统价格相对低廉,性能可靠,适用于水、煤气、电表的远传采集;数据传输总线选用M BUS ,传输速度快、距离远、可靠性高。
1 工作原理
该数据采集系统是对传统电表、水表、气表抄表系统加以改进,使其适合远传抄表。以普通的煤气表为例,选择在基表最后一级齿轮处加一磁铁(不算显示部分的逐级传递齿轮)。该级齿轮每转1圈,都要拨动显示部分的逐级传递齿轮8次,而每拨1次是0.001m 3,所以,该级齿轮每转1圈,共计0.008m 3的煤气。也就是最后一级齿轮每转125圈,即拨动显示部分的逐级传递齿轮1000次,煤气表的显示部分的计数为1m 3。而当小磁铁经过零功耗磁敏传感器表面时产生脉冲信号,利用MSP430单片机的捕获功能捕获到信号,引起中断,数据存储区地址1自加
1;若加到150,地址2自加1,地址1清零。存储区地址2
中的数据就是煤气表基表的数据。当总线要求单片机传
输数据时,单片机先确定是否可以传输数据。若可以,将地址2中的数据写入发送缓存,一位位地将数据发送出去;若不可以,等单片机空闲时再发送数据。
2 主要特点
该数据采集系统主要具有以下特点:
①采用零功耗磁敏传感器作为采集前端,工作时无须使用外加电源,且无触点、耐腐蚀、防水,寿命很长。
②采用MSP430系列单片机中的MSP430F449作为数据处理芯片,性能优良,价格低廉。
③采用M BUS (Meter BUS )总线进行数据传输,传输距离远,速度快,可靠性高。
④采集电路功耗很低,可采用锂电池供电或采用M BUS 总线供电。
3 数据采集系统的软硬件设计
3.1 设备选型
选用的TI 公司16位Flash 型MSP430系列超低功耗类型的单片机,特别适合于电池应用的场合或手持设备。在超低功耗方面,该单片机能够实现在1.8~3.6V 电压、1M Hz 的时钟条件下,耗电电流在0.1~400μA 之间;在片内外设方面,含有P0~P6七个I/O 口、2个定时器(Timer _A 、Timer _B )、1个看门狗、内部集成2K B 的ROM 和60K B 的RAM ,可10万次重复编程;MSP430系列单片机均为工业级的产品,运行环境温度为-40~+85℃;在价格方面,MSP430系列单片机一般只有几十元。总之,MSP430系列单片机的性价比不错,完全能够满足系统开发的需要。
图2基于MSP430F449单片机的数据采集器电路
在远传抄表系统中,有多种传感器可被选用,常用的有光电传感器和霍尔传感器。光电传感器和霍尔传感器工作时,都需要供电,电流一般为毫安级。这将导致供电电池的极大耗费。对于煤气表来说,在基表中通电还会引起安全方面的问题。选用零功耗磁敏传感器,工作时无须使用外加电源,适用于微功耗仪表,在远传抄表系统中是一种较好的采集用传感器。
零功耗磁敏传感器是通过韦根德效应制成的,故又名韦根德传感器,是利用磁性双稳态功能合金材料中的磁畴在磁场中的运动特性制作而成的。当外磁场发生变化时,磁畴磁化方向瞬间发生翻转,而当外磁场撤离后,它又瞬间恢复到原有的磁化方向,由此在合金材料周围的检测线圈中会感应出电脉冲信号,实现磁电转换。
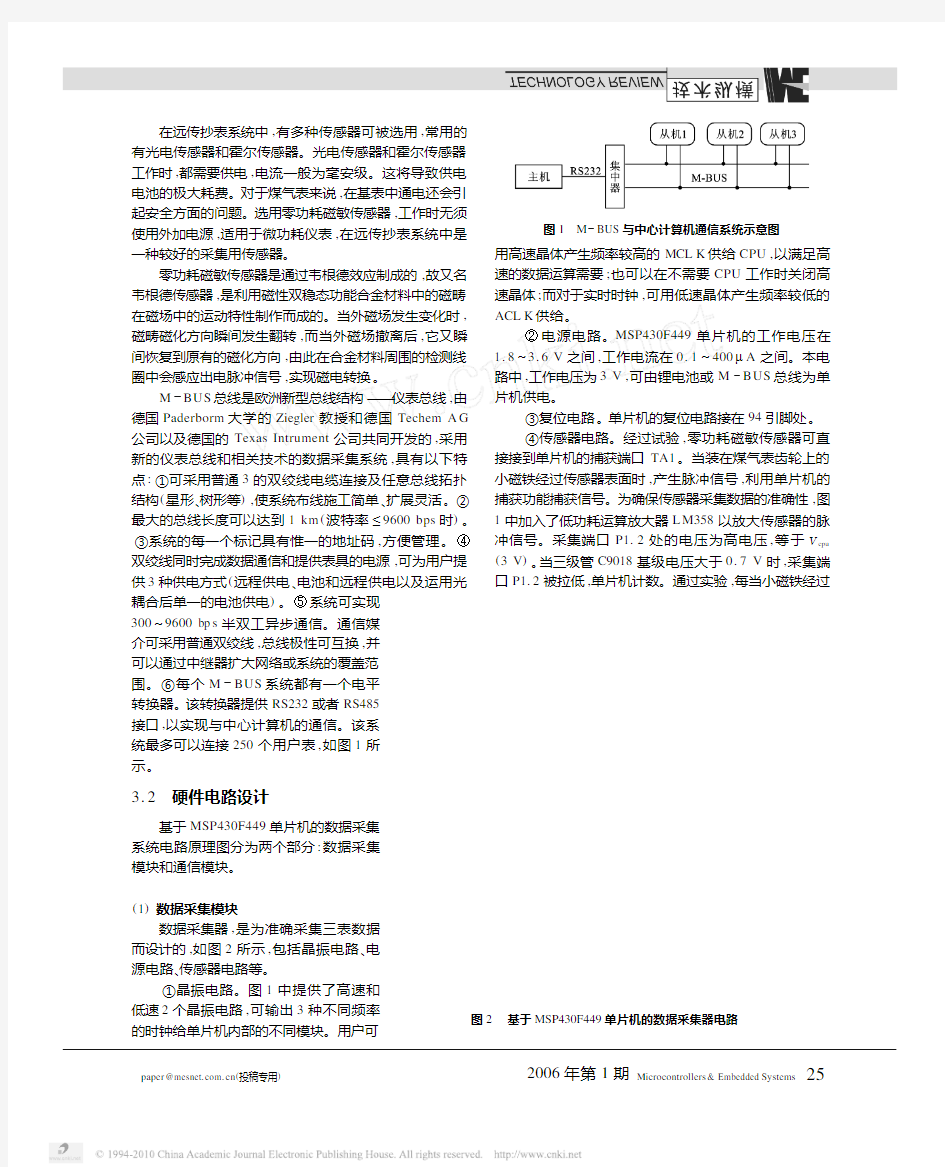
M BUS 总线是欧洲新型总线结构———仪表总线,由德国Paderborm 大学的Ziegler 教授和德国Techem A G 公司以及德国的Texas Intrument 公司共同开发的,采用新的仪表总线和相关技术的数据采集系统,具有以下特点:①可采用普通3的双绞线电缆连接及任意总线拓扑结构(星形、树形等),使系统布线施工简单、扩展灵活。②最大的总线长度可以达到1km (波特率≤9600bps 时)。③系统的每一个标记具有惟一的地址码,方便管理。④双绞线同时完成数据通信和提供表具的电源,可为用户提供3种供电方式(远程供电、电池和远程供电以及运用光耦合后单一的电池供电)。⑤系统可实现300~9600bp s 半双工异步通信。通信媒介可采用普通双绞线,总线极性可互换,并可以通过中继器扩大网络或系统的覆盖范围。⑥每个M BUS 系统都有一个电平转换器。该转换器提供RS232或者RS485接口,以实现与中心计算机的通信。该系统最多可以连接250个用户表,如图1所示。
3.2 硬件电路设计
基于MSP430F449单片机的数据采集系统电路原理图分为两个部分:数据采集模块和通信模块。
(1)数据采集模块
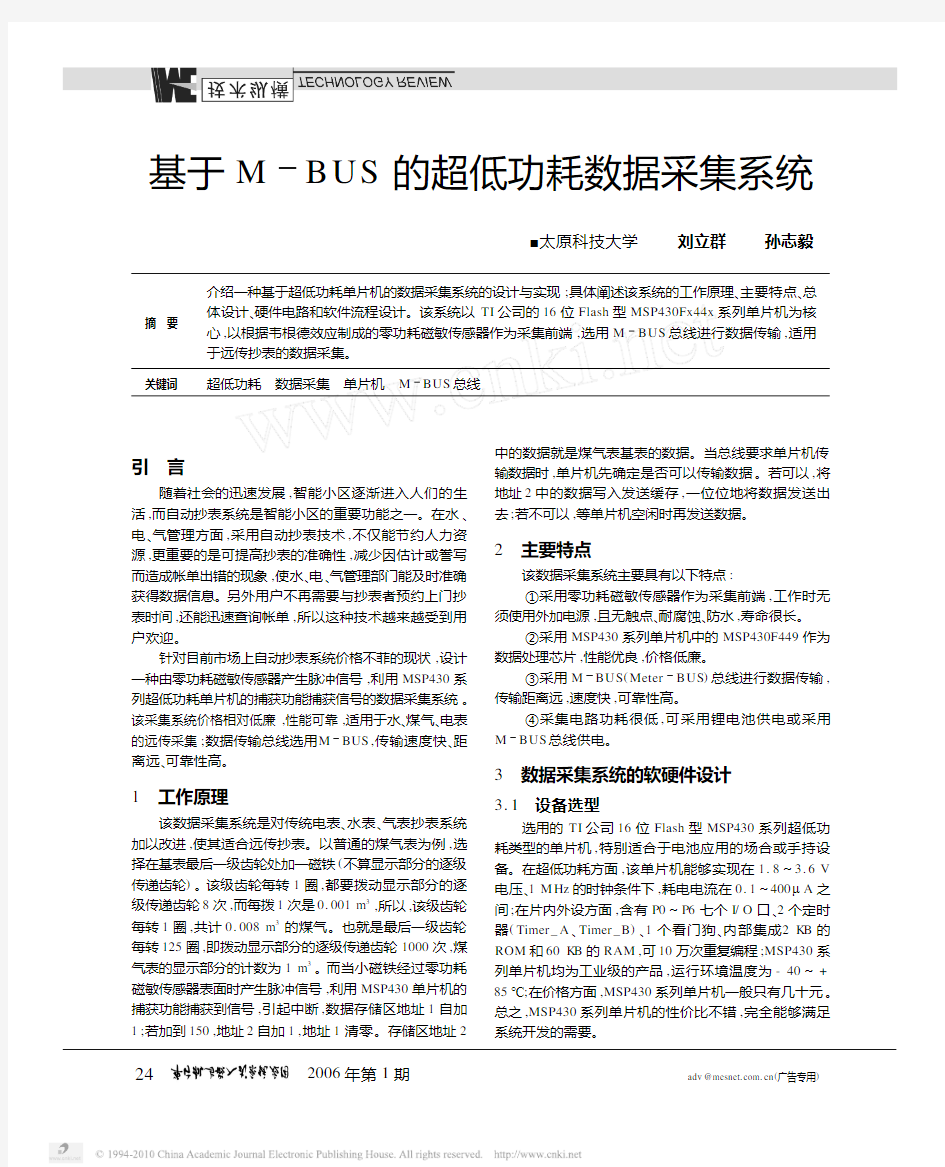
数据采集器,是为准确采集三表数据而设计的,如图2所示,包括晶振电路、电源电路、传感器电路等。
①晶振电路。图1中提供了高速和低速2个晶振电路,可输出3种不同频率
的时钟给单片机内部的不同模块。用户可
图1 M BUS 与中心计算机通信系统示意图
用高速晶体产生频率较高的MCL K 供给CPU ,以满足高
速的数据运算需要;也可以在不需要CPU 工作时关闭高速晶体;而对于实时时钟,可用低速晶体产生频率较低的ACL K 供给。
②电源电路。MSP430F449单片机的工作电压在1.8~3.6V 之间,工作电流在0.1~400μA 之间。本电路中,工作电压为3V ,可由锂电池或M BUS 总线为单片机供电。
③复位电路。单片机的复位电路接在94引脚处。④传感器电路。经过试验,零功耗磁敏传感器可直接接到单片机的捕获端口TA1。当装在煤气表齿轮上的小磁铁经过传感器表面时,产生脉冲信号,利用单片机的捕获功能捕获信号。为确保传感器采集数据的准确性,图1中加入了低功耗运算放大器L M358以放大传感器的脉冲信号。采集端口P1.2处的电压为高电压,等于V cpu (3V )。当三级管C9018基级电压大于0.7V 时,采集端口P1.2被拉低,单片机计数。通过实验,每当小磁铁经过
传感器1次,单片机的地址1就增计数1
次。
图3
通信模块电路
图4 程序流程
(2)通信模块
通信模块即单片机和总线集中器之间的数据传输电路,如图3所示。TSS721A 是美国德州仪器公司1999年初生产的一种用于M BUS 的专用收发器芯片。其内含的接口电路可以调节仪表总线结构中主从机之间的电平,可通过光电耦合器等隔离器件与总线连接。该收发器由总线供电,对从机不增加功率需求;外形采用16脚双列直插封装,将整个数据发送功能集于一体。其特点如下:①满足国际EN1434
3标准;②具有动态电平识别的接收
逻辑;③通过电阻可调接收电流;④无极性连接;⑤防掉电功能;⑥可提供3.3V 稳压源;⑦支持远程供电;⑧半双工下波特率可达9600bps ;⑨支持UAR T 协议;⑩从机可由总线或后备电池供电。该芯片上有8位拨段开关,用来设置总线上表具的惟一地址。而作为Master 存储各采集器模块的地址,并根据主控机的请求将采集模块的数据抄上来。集中器设置各采集模块的分频系数和各表的量纲和倍率。
为了布线方便,采用异步串行通信。所选取的
MSP430F449微处理器内部含有2个USAR T 模块(USART0和USAR T1)。该模块内部包含波特率设置部
分、接收部分、发送部分以及接口部分。
波特率设置模块的时钟来源于内部时钟或外部输入时钟,由SSEL1和SSEL0选择,以决定最终进入模块的频率。时钟信号BRCL K 送入1个15位的分频器,通过一系列的硬件控制,最终输出移出和移入的两个移位寄存器使用的移位时钟BITCL K ,信号波特率的设置由分频因子N 和所需的波特率(9600bps )来决定,数据的传送或接收主要是通过一个移位寄存器。接收时移位寄存器将接收来的数据流组合满一个字节,就保存到接收缓存U RXBU F ;发送时,将发送缓存U TXBU F 内的数据一位一位地送到发送端口。
TSS721A 的8位拨段开关用来设置总线上表具的惟一地址。上位机通过寻址的方式来实现和微处理器MSP430F448之间的通信。每次主机对某一地址呼叫,只有地址像相符的从机才可以识别呼叫并做出相应的响应。所采用的通信协议是半双工通信协议。
3.3软件设计
MSP430的开发软件较多,这里使用的是IAR 公司的
集成开发环境:IAR Embedded workbench 嵌入式工作台以及调试器C SP Y 。利用MSP430单片机的捕获功能,测试单片机能否准确捕获到来自传感器的信号。程序流程
如图4所示。
首先,对单片机进行初始化,定义单片机时钟、上升沿捕获、传输方式和输入输出端口设置等工作。然后开发中断程序,一旦有允许中断请求,CPU 被唤醒,进入活动模式,执行中断服务程序,执行完毕,系统返回到中断前的状态,继续低功耗模式。如图4所示,运行完主程序后,系统进入低功耗模式,如出现中断1,CPU 被唤醒,并将RAM 中某一地址的数据自加1;如出现中断2,CPU 被唤醒,通过传输线路可以将RAM 中某一地址的数据传输给PC 的串口界面。如出现中断1和中断2同时出现的特殊情况,通过实验,中断1的优先级高于中断2,即先执行完中断服务1后,再执行中断服务2。
4
结 论
从采集数据的安全性和可靠性
两个方面着手,选用新型传感器29
不以消耗节点的计算和存储资源为目的,而是着重消耗节点的能量。攻击者利用侵入节点,向网络注入大量的虚假数据,致使节点,尤其是路由节点,在大量的数据通信中耗尽能量而失效,从而导致整个网络瘫痪。由此而言,入侵者的首要目的是消耗路由节点的能量,其注入的虚假数据的传送距离越远,影响的节点数就越多。由于入侵者可能获得侵占节点的完全控制权,标准的验证机制对这类网络内部攻击的行为是没有作用的。
文献\[6\]提出的检出虚假数据机制,是在网络中设置汇流节点,并由汇流节点来认证传感器节点的身份和整合数据报,基站与汇流节点进行有效的分析和交互验证后检出虚假的数据报。该机制的重点是由基站检出入侵者注入的虚假数据以防止决策错误,而由于其不能减少虚假数据报的传送距离,故不能被用于能量攻击的防范措施。
为尽早检出和丢弃由被攻击节点注入的虚假数据包,以达到安全需要和降低由此产生的能源消耗,文献\[7\]将交互验证的思想进一步扩展,在簇首节点到基站的数据传送链路上的各个节点间建立关联关系,如图3所示,从而所有节点以一种交错的逐跳方式验证其要传递的数据包。只有t +1(t 是设定的安全上限,取簇内的节点数)个节点全部通过认证,数据包才能被传递到基站,因此,只要被攻击的节点数小于等于t ,基站或没有被攻击的节点就
能检测出并丢弃由入侵者注入的虚假数据包。
图3 节点关联示意图(t =3)
3 结 论
涉及传感器网络软件、硬件各个层面的能量消耗问题
至关网络生命周期。从网络构成及其运行过程而言,节点各个子系统的能量消耗又相互影响,此消彼长,针对单一
子系统的能量消耗控制策略并不能从根本上解决问题。因此必须结合网络的应用环境,从器件选择、数据处理算法的有效性和复杂性、数据通信量和网络运行机制等方面兼顾各个子系统的功能特点和性能要求,整体上评估能量消耗问题,必要时甚至适当降低性能标准,以设计相应的消耗控制策略,有效延长网络生命周期。总体上而言,传感器网络能量消耗控制策略应着重从器件本身的功耗特殊性、休眠进入原则、缩短通信距离和减少网络流量这几个方面进行量化和设计。然而到目前为止,传感器网络的能量有效性还没有被模型化和量化,也不具有被普遍接受的标准,需要更进一步地深入研究。
参考文献
1 李国华,沈树群.自组织无线传感器网络的研究.数据通信,
2004(4)
2 马祖长,孙怡宁,梅涛.无线传感器网络综述.通信学报,2004
(4)
3 Rhee S ,Seet haram D ,Liu S ,et al.i 2Beans :An Ultra 2low
Power Wireless Sensor Network.Interactive Poster in t he Fift h International Conference on Ubiquitous Computing (UBICOMP ),October ,2003
4 Dhanaraj M ,Manoj B S ,et al.A New Energy Efficient Proto 2col for Minimizing Multi 2hop Latency in Wireless Sensor Net 2works.Proc of t he 3rd IEEE Int ’l Conf.on Pervasive Compu 2ting and Communications ,2005
5 Tilak S ,Abu 2Ghazaleh NB ,et al.A Taxonomy of Wireless
Micro 2sensor Network Models.Mobile Computing and Com 2munications Review ,2002(2)
6 Sencun Zhu ,Sanjeev Setia ,et al.An Interleaved Hop 2by 2Hop
Aut hentication Scheme for Filtering of Injected False Data in
Sensor Networks.IEEE Symposium on Security and Privacy 2004
7 Cam H ,Ozdemi ,et al.ESPDA :Energy 2Efficient and Secure
Pattern 2based Data Aggregation for Wireless Sensor Net 2works.Proceedings of IEEE on Sensors ,October ,2003
(收稿日期:2005\|08\|23)
26
和低功耗MSP430系列单片机,设计出了用于远传抄表的
数据采集系统。该系统采用M BSU 总线进行数据传输。在M UBS 调试器软件环境下的实验结果表明,采集部分捕获信号准确率高,电路设计和软件设计合理,而且价格相对便宜,具有很好的应用前景。
参考文献
1 魏小龙.MSP430系列单片机接口技术及系统设计实例.北
京:北京航空航天大学出版社,20022 王华秋,张邦礼,向力.基于M BUS 现场总线协议的自动计
量系统.自动化与仪表,2003(1):29~31
3 董文军,汪仁煌.基于MSP430的极低功耗系统设计.单片
机与嵌入式系统应用,2003,(6):18~20
4 T exas Instruments Incorporated.MSP430Flash Self 2Programming
https://www.360docs.net/doc/5812810904.html,
5 T exas Instruments Incorporated.A Low 2C ost Single 2Phase Elec 2tricity Meter Using the MSP430C11x.1999
刘立群,硕士;孙志毅,教授:主要研究方向为智能控制理论与应用。
(收稿日期:2005\|08\|09)
最高效的四旋翼无人机数据采集建模
最高效的四旋翼无人机 数据采集建模 CKBOOD was revised in the early morning of December 17, 2020.
最高效的四旋翼无人机数据采集建模 一、简介 近年来,微小型四翼无人机已经成为了无人飞行器研究领域的一个热点。它结构简单、机动性强、便于维护,能够在空中悬停、垂直起飞和降落。在军用和民用方面具有较大的潜在应用价值,国内外许多研究单位纷纷致力于四旋翼无人机飞行控制的架构设计与飞行控制研究,以实现四旋翼无人机的自主飞行。机载传感器系统是四旋翼无人机飞行控制系统的重要组成部分,它为机载控制系统提供可靠的飞行状态信息,是实现四旋翼无人机自主飞行的重要设备。 现在无人机应用最广的是倾斜摄影技术优势或者说最吸引用户的,就是利用倾斜摄影技术可以全自动、高效率、高精度、高精细的构建地表全要素三维模型。 二、四旋翼无人机特点 1、机动性能灵活,低空性能出色。能在城市、森林等复杂环境下完成各种任务。可完成空中悬停监视侦查。实现对动力要地低,能在狭小空间穿行,能垂直起降,对起降环境要求低。 2、对动力要求较小,产生的噪音低,隐蔽性能高,安全性能出色。四旋翼无人机采用四个马达提供动力,可使飞行更加稳定和精确。 3、结构简单,运行、控制原理相对容易掌握。 4、成本较低,零件容易更换,维护方便。
三、飞行软件 目前无人机种类繁多,针对无人机开发的飞控软件也有很多,目前比较好用的是DJI GS Pro、DJI GO4、Litchi Vue、Pix4d等。 四、数据采集,使用DJI GS pro 1、打开DJI GS pro软件,点击新建任务 2、点击测绘航拍区域模式 3、点击地图选点(飞行定点比较耗飞机电量,无特殊情况建议不使用) 4、点击屏幕就会出现一个航测区域,手动拖拽四个定点可以改变航测的面积和形状,同时也可以手动增加拐点,让航测面积更加的灵活多样。并且在右边的菜单栏里选择好对应的云台相机;设置好任务的高度,任务的高度和拍摄的清晰度,成图的分辨率有很大的关系;大面积的时候尽量选择等时间拍照,因为能上传的航点是有限的。 5、点击进入右侧菜单的高级选项之中,重新设置一下航测的重叠了,一般航向和旁向重叠率是700%和70%(最好不要低于70%);设置好云台俯仰角,正射影像图一般为-90°,拍摄3D立体时一般为-45°;设置好返航高度,确保返航时不会碰撞到障碍物。 6、点击右上角飞机左边更多选项,点击高级设置(地图优化限中国大陆地区使用打开);这点也是最关键的一点,这时候一定要点开中国大陆这个选项,不然飞行器的位置是偏移的。会导致航测任务区域整体偏移,有一部分任务没有拍摄到。
信息采集系统解决方案
信息采集系统解决方案
信息采集系统解决方案 1系统概述 信息采集是信息服务的基础,为信息处理和发布工作提供数据来源支持。信息数据来源的丰富性、准确性、实时性、覆盖度等指标是信息服务的关键一环,对信息服务质量的影响至关重要。针对交通流信息数据,包括流量、速度、密度等,目前主要是基于微波、视频、地磁等固定车辆检测器以及浮动车等移动式车辆检测器进行采集,各种采集方式都存在响应的利弊。针对车驾管以及出入境数据,包括车辆信息、驾驶人信息、出入境办证进度信息等,主要是通过和公安相关的数据库进行对接,此类信息将在信息分析处理系统进行详细介绍。 针对目前交通信息来源的多样性以及今后服务质量水平发展对信息来源种类扩展要求,需要建设一套统一的,具备良好兼容性和前瞻性的交通信息统一接入接口。一方面,本期项目的各种交通信息来源可以使用该接口进行数据接入,另一方面,当新的或第三方的交通信息来源需要加入到本系统中来时,可以使用该接口进行数据接入,不需要再次投入资源进行额外开发。 统一接入接口建成后,根据各种数据来源系统的网络环境、系统技术特性和交通流信息数据特点,开发相应的交通信息数据对接程序,逐一完成微波采集系统、浮动车分析系统、人工采集等来源的交通信息数据采集接入。 2系统架构及功能介绍 2.1统一接入接口 统一接入接口的建设的关键任务包括接口技术规范制定、路网路段编码规则约定及交通信息数据结构约定等多个方面。
2.1.1接口技术规范 一方面由于本系统接入的交通信息数据来源多样,开发语言和系统运行的环境均存在差异,不具备统一的技术特性;另一方面,考虑到以后可能需要接入更多新的或第三方的信息系统作为数据来源,应当选择较成熟和通用的接口实现技术作为本项目的交通流信息采集统一接入接口实现技术。 根据目前信息系统建设的行业现状,选择Web Service和TCP/UDP Socket 作为数据传输接口的实现技术是较优的选择。Web Service和TCP/UDP Socket 具有实时性强、通用性强、应用广泛、技术支持资源丰富等优势,可以实现跨硬件平台、跨操作系统、跨开发语言的数据传输和信息交换。 项目实施时需要根据现有的信息采集系统的技术特点来具体分析,以选定采用Web Service或TCP/UDP Socket作为接口实现技术,必要时可以两种方式并举,提供高兼容度的接口形式。 为了保护接入接口及其数据传输的安全性,避免恶意攻击访问,避免恶意数据窃取,可以使用身份认证、加密传输等技术来加以保证。 统一数据采集接口的工作流程可以如下进行:
高速数据采集系统设计
高速数据采集系统 设计
基于FPGA和SoC单片机的 高速数据采集系统设计 一.选题背景及意义 随着信息技术的飞速发展,各种数据的实时采集和处理在现代工业控制和科学研究中已成为必不可少的部分。高速数据采集系统在自动测试、生产控制、通信、信号处理等领域占有极其重要的地位。随着SoC单片机的快速发展,现在已经能够将采集多路模拟信号的A/D转换子系统和CPU核集成在一片芯片上,使整个数据采集系统几乎能够单芯片实现,从而使数据采集系统体积小,性价比高。FPGA为实现高速数据采集提供了一种理想的实现途径。利用FPGA高速性能和本身集成的几万个逻辑门和嵌入式存储器块,把数据采集系统中的数据缓存和控制电路全部集成在一片FPGA芯片中,大大减小了系统体积,提高了灵活性。FPGA 还具有系统编程功能以及功能强大的EDA软件支持,使得系统具有升级容易、开发周期短等优点。 二.设计要求 设计一高速数据采集系统,系统框图如图1-1所示。输入模拟信号为频率200KHz、Vpp=0.5V的正弦信号。采样频率设定为25MHz。经过按键启动一次数据采集,每次连续采集128点数据,单片机读取128点数据后在LCD模块上回放显示信号波形。
图1-1 高速数据采集原理框图 三.整体方案设计 高速数据采集系统采用如图3-1的设计方案。高速数据采集系统由单片机最小系统、FPGA最小系统和模拟量输入通道三部分组成。输入正弦信号经过调理电路后送高速A/D转换器,高速A/D 转换器以25MHz的频率采样模拟信号,输出的数字量依次存入FPGA内部的FIFO存储器中,并将128字节数据在LCD模块回放显示。 图3-1 高速数据采集系统设计方案 四.硬件电路设计 1.模拟量输入通道的设计 模拟量输入通道由高速A/D转换器和信号调理电路组成。信号调理电路将模拟信号放大、滤波、直流电平位移,以满足A/D转换器对模拟输入信号的要求。
激光雷达高速数据采集系统解决方案
激光雷达高速数据采集系统解决方案 0、引言 1、 当雷达探测到目标后, 可从回波中提取有关信息,如实现对目标的距离和空间角度定位,并由其距离和角度随时间变化的规律中得到目标位置的变化率,由此对目标实现跟踪; 雷达的测量如果能在一维或多维上有足够的分辨力, 则可得到目标尺寸和形状的信息; 采用不同的极化方法,可测量目标形状的对称性。雷达还可测定目标的表面粗糙度及介电特性等。接下来坤驰科技将为您具体介绍一下激光雷达在数据采集方面的研究。 1、雷达原理 目标标记: 目标在空间、陆地或海面上的位置, 可以用多种坐标系来表示。在雷达应用中, 测定目标坐标常采用极(球)坐标系统, 如图1.1所示。图中, 空间任一目标P所在位置可用下列三个坐标确定: 1、目标的斜距R; 2、方位角α;仰角β。 如需要知道目标的高度和水平距离, 那么利用圆柱坐标系统就比较方便。在这种系统中, 目标的位置由以下三个坐标来确定: 水平距离D,方位角α,高度H。 图1.1 用极(球)坐标系统表示目标位置
系统原理: 由雷达发射机产生的电磁能, 经收发开关后传输给天线, 再由天线将此电磁能定向辐射于大气中。电磁能在大气中以光速传播, 如果目标恰好位于定向天线的波束内, 则它将要截取一部分电磁能。目标将被截取的电磁能向各方向散射, 其中部分散射的能量朝向雷达接收方向。雷达天线搜集到这部分散射的电磁波后, 就经传输线和收发开关馈给接收机。接收机将这微弱信号放大并经信号处理后即可获取所需信息, 并将结果送至终端显示。 图1.2 雷达系统原理图 测量方法 1).目标斜距的测量 雷达工作时, 发射机经天线向空间发射一串重复周期一定的高频脉冲。如果在电磁波传播的途径上有目标存在, 那么雷达就可以接收到由目标反射回来的回波。由于回波信号往返于雷达与目标之间, 它将滞后于发射脉冲一个时间tr, 如图1.3所示。 我们知道电磁波的能量是以光速传播的, 设目标的距离为 R, 则传播的距离等于光速乘上时间间隔, 即2R=ct r 或 2 r ct R
过程装备中数据采集系统的低功耗设计
收稿日期:2002 08 05 作者简介:黄志勇(1978 ),男,江西南昌人,硕士生,研究方向为便携式数据采集系统的开发与研制。 过程装备中数据采集系统的低功耗设计 黄志勇,邹久朋 (大连理工大学过程装备与控制工程系,辽宁大连116012) [摘 要] 从理论分析和实际应用两个方面阐述和讨论了低功耗大容量便携式数据采集仪的研制方案。主要从芯片的选型、外围电路的设计、软件设计等方面入手来分析如何使电池供电的数据采集系统长时间工作于无人看管的场所。 [关键词] 单片机;低功耗;外围电路;数据采集 [中图分类号]TM911 [文献标识码]A [文章编号]1000 0682(2003)01 0034 03 The Low dissipation design of a data acqusition system in process equipment HUANG Zhi yong,ZOU Jiu Peng (Proc ess Equi pment &Cont rol Engineering De pt o f DaLian U niversity o f Tec hnology ,Liaoning Dalian 116012,China ) Abstract:This paper expatiates on the method of designing a portable and large capacity microcontroller system with low power dissipation and discusses its development through both theoretic analysis and actual ap plications.Proceeding from the circuits,design,components and selection to software configuration,the paper analyses how the design conception can realize the function that keeps the battery operated data acquisition sys tem working for a long time at its working field without tenders. Key words:Microcontroller;Lo w power dissipation;Peripheral circuit;Data acquisition 1 前 言 由单片机组成的数据采集系统已经广泛的应用在过程装备的各个领域。通常在野外偏远地区、高温高压场所要进行压力、温度和应力等的数据采集时,由于没有持续的电力供给,而且工作温度有限制,不太适合使用笔记本电脑等设备进行数据采集,只能使用电池供电的数据采集系统。而一般情况下数据采集需持续几天到几个月,这样整个系统的功耗成为影响系统设计的关键问题。 2 低功耗的硬件设计 在实际应用中数据采集系统主要由传感器、A/ D 转换器、单片机、存储器、与微机接口电路等组成。除传感器外,设计人员基本上是选用低功耗C MOS 或HCMOS 型工艺制造的IC 。而CMOS 电路的功耗由静态功耗(Ps )和动态功耗(Pd )组成。静态功耗是在电路的所有输入信号保持状态不变时的直流功 耗。它包括PN 结反向漏电流引起的功耗和MOS 晶体管的亚阈电流引起的功耗。由于它一般在微安( A)量级[1],可以忽略。动态功耗是C MOS 电路在正常操作时所消耗的能量。它一般在毫安级(mA)。所以在低功耗设计时,应尽量减少动态功耗。 动态功耗Pd 是对电路节点负载电容进行充放电所消耗的功率。表示为: Pd =RC L V L V dd f (2 1) 式中:C L 负载电容; V L 逻辑摆幅;V dd 电源电压;f 工作频率; R 能量状态转换活动几率。 R 又简称 开关活动率 ,它是指节点一个周期内做耗能状态转换所用的时间与时钟周期之比,它的大小与电路结构、逻辑功能、输入数据的组合状态及节点的初始状态有关。一般情况下C MOS 电路的逻辑摆幅V L 与电源电压V dd 近似,故(2 1)式可简化为: P d =RC L V 2dd f (2 2) 由上式可知,降低动态功耗的主要途径是:降低耗能状态转换活动几率、减少负载电容、降低工作电 34 工业仪表与自动化装置 2003年第1期
基于Zigbee的低功耗数据采集系统设计
密级一般 分类号TP393硕士学位论文 作者:杨朋伟 指导教师:侯宏录教授 申请学位学科: 2009年4月20日 XI’ANTECHNOLOGICAL UNIVERSITY 基于Zigbee的低功耗数据采集系统设计 测试计量技术及仪器 题目:
基于Zigbee的低功耗数据采集系统设计 学科:测试计量技术及仪器 研究生签字: 指导教师签字: 摘要 Zigbee无线传感器网络技术是一种全新的短距离无线通信技术,广泛应用于智能控制、无线监控及环境监测等领域。目前,对于Zigbee无线传感器网络技术的应用还存在诸多问题,本文重点对无线传感器网络时间同步算法、低功耗系统设计开展深入研究。 1.对Zigbee无线传感器网络时间同步算法进行了全面分析研究,从降低同步开销和关键路径长度的角度出发,提出了两种应用于不同环境下的时间同步算法。1)当网络规模较小时,采用二层拓扑结构的Zigbee时间同步算法,该算法通过构造二层拓扑结构和时延估计的方法实现了ms级的时间同步精度.降低了时间同步开销;2)当网络规模较大时,采用多跳传感器网络时间同步算法,该算法通过构造较优拓扑结构和累计时延估计的办法降低了时间同步开销及关键路径长度。 2.通过对Zigbee协议栈的研究及分析,从低功耗设计的角度出发,完成了Zigbee低功耗无线数据采集及传输系统设计。主要内容包括如下几个方面: 1)完成了Zigbee无线网络节点的电路设计及相关应用电路设计,在此基础上,应用IAR7.20H开发平台完成了Zigbee无线网络节点的功能软件设计。 2)使用TI公司的CC2430芯片完成了Zigbee节点点对点无线通信的设计及Zigbee 简单网络节点通信设计。 3)完成了多路传感器数据采集接口的设计及Zigbee无线网络监控管理软件设计。 4)研究了无线网络节点功能软件的低功耗设计方法。 5)搭建了Zigbee低功耗无线数据采集及传输系统,对其进行了调试和实验,结果表明该系统在70m范围内工作稳定,误码率较低,时间同步精度较高,能够满足工业环境下的参数远程监控。 关键词:数据采集及传输;低功耗;无线传感器网络;时间同步算法;Zigbee
实时数据采集系统方案
实时数据采集系统项目解决方案
目录 1、背景 (2) 1. 1、引言 (2) 1.2、项目目标 (2) 2、应用系统体系结构 (3) 2.1、实时数据采集系统的原理构架 (3) 3、实时数据采集系统的主要功能….. .............................................................. .3 4、实时数据采集系统主要技术特征 (4) 4.1、数据传输方面 (5) 4.2、数据存储方面 (5) 4.3、历史数据 (5) 4.4、图形仿真技术 (5) 5、实时数据采集系统性能特征 (5) 5.1、数据具有实时性 (6) 5.2、数据具有稳定性 (6) 5.3、数据具有准确性 (6) 5.4、数据具有开放性 (6) 6、DCS及实时数据采集机连接说明 (6) 7、系统运行环境说明 (7) 7.1系统网络环境说明 (8) 7.2硬件环境说明 (8)
1、背景 1. 1、引言 随着国家大力推进走新型工业化道路,以信息化带动工业化,以工业化促进信息化。电力企业面临着日趋激烈的竞争。降低成本,提高生产效率,快速响应市场,是电力企业不断追求的目标。要实现上述目标,必须把企业经营生产中的各个环节,包括市场分析、经营决策、计划调度、过程监控、销售服务、资源管理等全部生产经营活动综合为一个有机的整体,实现综合信息集成,使企业在经营过程中保持柔性,因此,建立全厂统一的生产实时数据平台,就成了流程企业今后生产信息化的关键。 1.2、项目目标 “实时数据采集系统”是为生产过程进行实时综合优化服务信息系统提供数据基础。 企业信息化建设的关键问题是集成,即在获取生产流程所需全部信息的基础上,将分散的控制系统、生产调度系统和管理决策系统有机地 集成起来,不同业务和系统间能够实时的交换和共享数据。 ?建立统一的企业数据模型。 ?解决分期建设的不同应用系统、不同电厂之间彼此隔离、互不匹配、 互不共享的“信息孤岛”问题。 ?保证数据来源一致性,提高数据经过层层抽取之后的可信度。 ?汇总、分析和展示企业历史的业务数据。 ?企业管理层能够直接根据各个电厂的真实数据进行统计数据、分析 逐步钻取直到数据根源。 ?透明底层的数据,监督统计分析数据的准确性。
数据采集系统简介研究意义和应用
一前言 1.1 数据采集系统简介 数据采集,是指从传感器和其它待测设备等模拟和数字被测单元中自动采集信息的过程。数据采集系统是结合基于计算机(或微处理器)的测量软硬件产品来实现灵活的、用户自定义的测量系统。该数据采集系统是一种基于TLC549模数转换芯片和单片机的设备,可以把ADC采集的电压信号转换为数字信号,经过微处理器的简单处理而交予数码管实现电压显示功能,并且通过与PC的连接可以实现计算机更加直观化显示。 1.2 数据采集系统的研究意义和应用 在计算机广泛应用的今天,数据采集的在多个领域有着十分重要的应用。它是计算机与外部物理世界连接的桥梁。利用串行或红外通信方式,实现对移动数据采集器的应用软件升级,通过制订上位机(PC)与移动数据采集器的通信协议,实现两者之间阻塞式通信交互过程。在工业、工程、生产车间等部门,尤其是在对信息实时性能要求较高或者恶劣的数据采集环境中更突出其应用的必要性。例如:在工业生产和科学技术研究的各行业中,常常利用PC或工控机对各种数据进行采集。这其中有很多地方需要对各种数据进行采集,如液位、温度、压力、频率等。现在常用的采集方式是通过数据采集板卡,常用的有A/D 卡以及422、485等总线板卡。卫星数据采集系统是利用航天遥测、遥控、遥监等技术,对航天器远地点进行各种监测,并根据需求进行自动采集,经过卫星传输到数据中心处理后,送给用户使用的应用系统。 1.3 系统的主要研究内容和目的 本课题研究内容主要包括:TLC549的工作时序控制,常用的单片机编辑C语言,VB 串口通信COMM控件、VB画图控件的运用等。 本课题研究目的主要是设计一个把TLC549(ADC)采集的模拟电压转换成八位二进制数字数据,并把该数据传给单片机,在单片机的控制下在实验板的数码管上实时显示电压值并且与计算机上运行的软件示波器连接,实现电压数据的发送和接收功能。
无人机激光雷达扫描系统
Li-Air无人机激光雷达扫描系统 Li-Air无人机激光雷达扫描系统可以实时、动态、大量采集空间点云信息。根据用户不同应用需求可以选择多旋翼无人机、无人直升机和固定翼无人机平台,可快速获取高密度、高精度的激光雷达点云数据。 硬件设备 Li-Air无人机激光雷达系统可搭载多种类型扫描仪,包括Riegl, Optech, MDL, Velodyne等,同时集成GPS、IMU和自主研发的控制平台。 图1扫描仪、GPS、IMU、控制平台 无人机激光雷达扫描系统设备参数见表格1: 表格 1 Li-Air无人机激光雷达扫描系统 图2 八旋翼无人机激光雷达系统图3 固定翼无人机激光雷达系统 设备检校
公司提供完善的设备检较系统,在设备使用过程中,定期对系统的各个组件进行重新标定,以保证所采集数据的精度。 图1扫描仪检校前(左)扫描仪检校后(中)检校前后叠加图(右) 图4(左)为检校前扫描线:不连续且有异常抖动;图4(中)为检校后扫描线:数据连续且平滑变化;图4(右)为检校前后叠加图,红线标记的部分检校效果对比明显。 图5从左至右依次为校正前(侧视图)、校正后(侧视图)、叠加效果图图5(左)为检校前扫描线:不在同一平面;图4(中)为检校后扫描线:在同一平面;图4(右)为检校前后叠加图。 成熟的飞控团队 公司拥有成熟的软硬件团队以及经验丰富的飞控手,保证数据质量以及设备的安全性,大大节约了外业成本和时间。
图6无人机激光雷达系统以及影像系统 完善的数据预处理软件 公司自主研发的无人机系统配备有成套的激光雷达数据预处理软件Li-Air,该软件可对无人机实时传回的激光雷达数据进行航迹解算、数据生成、可视化等。 图7 Li-Air数据预处理功能 成功案例 2014年7月,本公司利用Li-Air无人机激光雷达扫描系统进行中关村软件园园区扫描项目,采集园区高清点云以及影像数据。飞行高度200m,点云密度约50点/平方米,影像地面分辨率为5cm。通过POS数据解算,完成对点云和影像数据的整合,得到地形信息和DOM等。
实时数据采集系统方案
实时数据采集系统方案
实时数据采集系统《项目解决方案》 实时数据采集系统 项目解决方案 0 实时数据采集系统《项目解决方案》 目录 1、背 景 ..................................................................... .................................... 2 1. 1、引 言 ..................................................................... ..................... 2 1(2、项目目 标 ..................................................................... ............. 2 2、应用系统体系结 构 ..................................................................... .............. 3 2.1、实时数据采集系统的原理构架…………………………………..3 、实时 数据采集系统的主要功 能….. ........................................................... .3 3 4、实时数据采集系统主要技术特 征 .............................................................. 4
4.1、数据传输方面……………………………………………………..5 4.2、数据存储方面……………………………………………………..5 4.3、历史数据…………………………………………………………...5 4.4、图形仿真技术……………………………………………………..5 5、实时 数据采集系统性能特 征 ...................................................................... 5 5.1、数据具有实时性…………………………………………………..6 5.2、数据具有稳定性…………………………………………………..6 5.3、 数据具有准确性…………………………………………………6 5.4、数据具有开放性…………………………………………………..6 6、DCS 及实时数据采集机连接说 明 ............................................................. 6 7、系 统运行环境说 明 ..................................................................... ................ 7 7.1 系统网络环境说明………………….……………………………....8 7.2 硬件环境说明……………………………………………………….8 1 实时数据采集系统《项目解决方案》 1、背景 1. 1、引言 随着国家大力推进走新型工业化道路,以信息化带动工业化,以工业化促进信 息化。电力企业面临着日趋激烈的竞争。降低成本,提高生产效率,快速响应市
高速数据采集系统
目录 1系统摘要 (2) 2系统设计理论 (2) 3系统设计方案 (4) 3.1AD7891高速数据采集系统 (4) 3.1.1 AD7891结构及功能 (4) 3.1.2工作时序和极限参数 (5) 3.1.3 AD7891的应用 (6) 3.1.4 AD7891与微处理器的接口 (8) 3.2PCI-1714高速数据采集系统……………………………….…,,,.9 3.2.1 PCI- 1714 功能结构和特点 (9) 3.2.2 PCI- 1714的系统构成..............................,.. (10) 3.3基于AT89C51的数据采集通信系统设计 (12) 3.3.1系统硬件设计 (12) 3.3.2系统软件设计 (14) 4各种方案的比较 (16) 5心得体会 (17) 6参考文献 (18)
1.系统简介 随着数字技术的飞速发展,高速数据采集系统也迅速地得到了广泛的应用。在生产过程中,应用这一系统可以对生产现场的工艺参数进行采集、监视和记录,为提高生产质量,降低成本提供了信息和手段。在科学研究中,应用数据采集系统可以获取大量的动态数据,是研究瞬间物理过程的有力工具,为科学活动提供了重要的手段。而当前我国对高速数据采集系统的研究开发都处于起步阶段,因此,开发出高速数据采集系统就显得尤为重要了。 所谓高速数据采集系统,是用计算机控制的多路数据自动检测或巡回检测(其对象包括数字和模拟信号),并且能够对数据实行某些处理(包括存储、处理、分析计算以及从检测的数据中提取可用的信息),以供显示、记录、打印或描绘的系统。 在数字技术日新月异的今天,数据采集技术的重要性是十分显著的。它是数字世界和外部物理世界连接的桥梁。而随着现代工业和科学技术的发展,对数据采集技术的要求日益提高,在雷达、声纳、图像处理、语音识别、通信、信号测试等科研实践领域中,都需要高精度,高数据率的数据采集系统。它的关键技术为高速高精度的ADC 技术,高数据率的存储和缓存技术以及系统高可靠性保证等。通过数据采集技术,科研人员在实验现场可以根据需要实时记录原始数据,用于实验室后期的分析和处理,对工程实践和理论分析探索具有重大意义。 2.系统设计理论 整个高速数据系统主要分为四个部分:数据采集部分、数据控制部分、数据处理部分、数据传输部分。 在数据采集部分,主要应用的就是采样定理、模数转换器ADC 及A/D 转换技术。采用定理说明采样频率与信号频谱之间的关系,是连续信号离散化的基本依据。具体内容是,频带为F 的连续信号f(t)可用一系列离散的采样值)1(t f ,)1(t t f ?±,)1(t t f ?±,……来表示,只要这些采样点的时间间隔F t 21≤?,便可根据各采样值完全恢复原来的信号)(t f 。模数转换器ADC 用来把连续变化的模拟信号转换为一定格式的数字量。ADC 转换器实际上就是一个编码器,输
数据采集系统的历史与发展
数据采集系统的历史与发展 数据采集系统起始于20设计50年代,1956年美国首先研究了用在军事上的测试系统,目标是测试中不依靠相关的测试文件,由非熟练人员进行操作,并且测试任务是由测试设备高速自动控制完成的。由于该种数据采集测试系统具有高速性和一定的 灵活性可以满足众多传统方法不能完成的数据采集和测试任务,因而得到了初步的认可。大约在60年代后期,国外就有成套的数据采集设备产品进入市场,此阶段的数据采集设备和系统多属于专业的系统。 20世纪70年代中后期,随着微型的发展,诞生了采集器,仪表同计算机溶于一 体的数据采集系统。由于这种数据采集系统的性能优良,超过了传统的自是这一类的 典型代表。这种接口系统采用积木式结构,把相应的接口卡装在专用的机箱内,然后 由一台计算机控制。第二类系统在工业现场应用较多。这两种系统中,如果采集测试 任务改变,只需将新的仪用电缆接入系统,或将新卡在添加的专业的机箱里即可完成 硬件平台中建,如果采集测试任务改变,只需将新的仪用电缆接入系统,或将新卡再 添加到专用的机箱即可完成硬件平台重建,显然,这种系统比专用系统灵活得多。20 世纪80年代后期,数据采集系统发生了极大的变化,工业计算机,单片机和大规模集成电路的组合,用软件管理,使系统的成本降低,体积减小,功能成倍增加,数据处 理能力大大加强。 20世纪90年代至今,在国际上技术先进的国家,数据采集技术已经在军事,航 空电子设备及宇航技术,工业等领域被广泛应用。由于集成电路制造技术的不断提高,出现了高性能,高可靠性的单片数据采集系统(DAS)。目前有的DAS产品精度已达16位,采集速度每秒达到几十万次以上。数据采集技术已经成为一种专门的技术,在工业领域得到了广泛的应用。该阶段数据采集系统采用更先进的模块式结构,根据不 同的应用要求,通过简单的增加和更改模块,并结合系统编程,就可扩展或修改系统,迅速地组成一个新的系统。该阶段并行总线数据采集系统高速,模块化和即插即用方 向发展,典型系统有VXI总线系统,PCI,PXI总线系统等,数据位以达到32位总线宽度,采用频率可以达到100MSps。由于采用了高密度,屏蔽型,针孔式的连接器和卡 式模块,可以充分保证其隐定性急可靠性,但其昂贵的价格是阻碍它在自动化领域取 得了成功的应用。 串行总线数据采集系统向分布式系统结构和智能化方向发展,可靠性不断提高。 数据采集系统物理层通信,由于采用RS485双绞线,电力载波,无线和光纤,所以其技术得到了不断发展和完善。其在工业现场数据采集和控制等众多领域得到了广泛的 应用。由于目前局域网技术的发展,一个工厂管理层局域网,车间层的局域网和底层 的设备网已经可以有效地连接在一起,可以有效地把多台数据采集设备联在一起,以 实现生产环节的在线实时数据采集与监控。
一种高速数据采集系统的研究
第31卷第5期 唐山师范学院学报 2009年9月 Vol. 31 No. 5 Journal of Tangshan Teachers College Sep. 2009 ────────── 收稿日期:2008-12-12 作者简介:李洋(1982-),男,河北衡水人,唐山师范学院基础教育部教师。 -66- 一种高速数据采集系统的研究 李 洋,郭小松 (唐山师范学院 基础教育部,河北 唐山 063000) 摘 要:由于高速数据采集对信号完整性、信号干扰、高速布线及数据处理和高速实时存储要求极高,而其应用环境又往往非常复杂,所以在目前的实际应用中,很难实现一种既能进行长时间高速数据采集、又能进行大容量存储的数据采集系统。在此背景下,提出了一种高速数据采集及存储的解决方案,采用高速FPGA 加嵌入式微处理器作为中央处理器来进行高速数据传输和磁盘阵列数据存储,实现高速数据采集及大容量实时存储。 关键词:数据采集;模数转换;海量存储;RAID0 中图分类号: T N919.5 文献标识码:A 文章编号:1009-9115(2009)05-0066-03 Study of High-Speed Data Acquisition and Storage System LI Yang, GUO Xiao-song (Department of Foundation Education, Tangshan Teachers College, Tangshan Hebei 063000, China) Abstract: Because of the extreme requirements of signal integrity, noise jamming, high-speed layout, high-speed real-time storage and the complex application environments, it is very difficult to realize a high-speed data acquisition system which is suitable for long-time data acquisition and mass storage. Against this background, a solution of high-speed data acquisition and storage system is introduced in this thesis, which is using of high-speed FPGA and embedded microprocessors as the central processing device for high-speed data transfer and data storage of redundant array of inexpensive disks , realized on-time data acquisition and mass storage. Key words: data acquisition; A/D convert; mass storage; RAID 现代工业生产和科学研究对数据采集的要求日益提高,在雷达、声纳、软件无线电、瞬态信号测量等一些高速、高精度的测量中,需要进行高速数据采集。目前,数据采集系统在高速A/D 、D/A 器件发展的带动下,采集带宽在稳步提高,具有100MSPS 采集能力以上的高速数据采集系统产品己较成熟。然而国外厂商的高速采集系统往往都价格不菲,而且由于高速数据采集对信号完整性、信号干扰、高速布线及数据处理和高速实时存储要求极高,国内完全掌握这个技术的厂商并不多,所以在实际应用中,很难找到一种满足需要的高速采集系统。这种情况长期限制了高速数据采集技术在我国工业生产和科学研究中的应用。 在这样的背景下,本文提出一种高速数据采集与实时存储系统的解决方案,解决以往在高速技术、数据存储与传输技术等方面的几个技术难点,采用FPGA 作为核心器件,集成中央逻辑控制及硬盘接口,直接将高速数据存入有多块硬 盘组成的实时RAID 存储系统中,实现了高速采集和实时存储,并可脱机运行。这种方案成本低廉,能提高采集速度,增加系统可靠性,并大大提高可持续采集时间,具有较大的灵活性。 1 总体系统方案硬件设计 高速数据采集系统的主要目的是把采集到的模拟信号转化为数字信号,所以模拟信号进入数据采集系统的第一步就是通过AD 采集电路进行模数转换;采集到的数据为了以后研究调用,就需要存储到存储器中,所以系统的最后一步是使用高速海量存储器对数据进行存储;系统的启动、停止和数据传输的方式还需要使用中央逻辑控制电路,所以在AD 采集电路与高速海量存储器之间增加中央逻辑控制电路来作为AD 采集电路与高速海量存储器之间的桥梁;系统通过人机接口与PC 机连接,可以对数据采集系统进行调试,还方便调用存储数据进行研究测试,并实现
数据采集系统
湖南工业大学科技学院 毕业设计(论文)开题报告 (2012届) 教学部:机电信息工程教学部 专业:电子信息工程 学生姓名:肖红杰 班级: 0801 学号 0812140106 指导教师姓名:杨韬仪职称讲师 2011年12 月10 日
题目:基于单片机的数据采集系统的控制器设计 1.结合课题任务情况,查阅文献资料,撰写1500~2000字左右的文献综述。 近年来,数据采集及其应用技术受到人们越来越广泛的关注,数据采集系统在各行各业也迅速的得到应用。如在冶金、化工、医学、和电器性能测试等许多场合需要同时对多通道的模拟信号进行采集、预处理、暂存和向上位机传送、再由上位机进行数据分析和处理,信号波形显示、自动报表生成等处理,这些都需要数据采集系统来完成。但很多数据采集系统存在功能单一、采集通道少、采集速率低、操作复杂、并且对操作环境要求高等问题。人们需要一种应用范围广、性价比高的数据采集系统,基于单片机的数据采集系统具有实现处理功能强大、处理速度快、显示直观,性价比高、应用广泛等特点,可广泛应用于工业控制、仪器、仪表、机电一体化,智能家居等诸多领域。总之,无论在那个应用领域中,数据采集与处理越及时,工作效率就超高,取得的经济效益就越大。 数据采集系统的任务,就是采集传感器输出的模拟信号转换成计算机能识别的信号,并送入计算机,然后将计算得到的数据进行显示或打印,以便实现对某些物理量的监测,其中一些数据还将被生产过程中的计算机控制系统用来控制某些物理量。 数据采集系统的市场需求量大,特别是随着技术的发展,可用数据器为核心构成一个小系统,而目前国内生产的主要是数据采集卡,存在无显示功能、无记忆存储功能等问题,其应用有很大的局限性,所以开发高性能的,具有存储功能的数据采集产品具有很大的市场前景。 随着电子技术的迅速发展,,一些高性能的电子芯片不断推出,为我们进行电子系统设计提供的更多的选择和更多的方便,单片机具有体积小、低功耗、使用方便、处理精度高、性价比高等优点,这些都使得越来越广泛的选用单片机作为数据采集系统的核心处理器。一些高性能的A/D转换芯片的出现也为数据采集系统的设计提供了更多的方便,无论是采集精度还是采样速度都比以前有了较大的提高。其中一些知名的大公司如MAXIM公司、TI公司、ADI公司都有推出性能比效突出的 A/D转换芯片,这些芯片普通具有低功耗、小尺寸的特点,有些芯片还具有多通道的同步转换功能。这些芯片的出现,不仅因为芯片价格便宜,能够降低系统设计的成本,而且可以取代以前繁琐的设计方法,提高系统的集成度。 数据采集器是目前工业控制中应用较多的一类产品,数据采集器的研制已经相当成熟,而且数据采集器的各类不断增多,性能越来越好,功能也越来越强大。 在国外,数据采集器已发展的相当成熟,无论是在工业领域,还是在生活中的应用,比如美国FLUKE公司的262XA系列数据采集器是一种小型、便携、操作简单、使用灵活的数据采集器,它既可单独使用又可和计算机连接使用,它具有多种测量
无人机数据传输系统-手册
1.概论: 无人机,即无人驾驶的飞机。是指在飞机上没有驾驶员,只是由程序控制自动飞行或者由人在地面或母机上进行遥控的飞机。它装有自动驾驶仪、程序控制系统、遥控与遥测系统、自动导航系统、自动着陆系统等,通过这些系统可以实现远距离飞行并得以控制。无人机与有人驾驶的飞机相比而言,重量轻、体积小、造价低、隐蔽性好,特别宜于执行危险性大的任务,因此被广泛应用。 二、无人机的特点及技术要求 无人机没有飞行员,其飞行任务的完成是由无人飞行器、地面控制站和发射器组成的无人机系统在地面指挥小组的控制一下实现的。据此,无人机具有以下特点: (1)结构简单。没有常规驾驶舱,无人机结构尺寸比有人驾驶飞机小得多。有一种无尾无人机在结构上比常规飞机缩小40%以上。重量减轻,体积变小,有利于提高飞行性能和降低研制难度。 (2)安全性强。无人机在操纵人员培训和执行任务时对人员具有高度的安全性,保护有生力量和稀缺的人力资源。可以用来执行危险性大的任务。 (3)性能提高。无人机在设计时不用考虑飞行员的因素。许多受到人生理和心理所限的技术都可在无人机上使用,从而突破了有人在机的危险,保证了飞行的安全性。 (4)一机多用,稍作改进后发展为轻型近距离对地攻击机。
(5)采用成熟的发动机和主要机载设备,以减少研制风险与经费投入,加快研制进度。联合研制以减小投资风险、解决经费不足有利于扩大出口及扬长技术与设备优势。 (6)研制综合训练系统。技术要求有: (1)信息技术包括信息的收集和融合,信息的评估和表达,防御性的信息战、自动目标确定和识别等; (2)设备组成包括低成本结构、小型化及模块化电子设备、低可见性天线、小型精确武器、可储存的高性能发动机及电动作动器等; (3)性能实现包括先进的低可见性和维护性技术、任务管理和规划、组合模拟和训练环境等。 三、无人机系统按照功能划分,主要包括四部分: (1)飞行器系统 包括空中和地面两大部分。空中部分包括:无人机、机载电子设备和辅助设备等,主要完成飞行任务。地面部分包括:飞行器定位系统、飞行器控制系统、导航系统以及发射回收系统,主要完成对飞行器的遥控、遥测和导航任务,空中与地面系统通过数据链路建立起紧密联系。 (2)数据链系统 包括:遥控、遥测、跟踪测量设备、信息传输设备、数据中继设备等用以指挥操纵飞机飞行,并将飞机的状态参数及侦察信息数据传到控制站。 (3)任务设备系统 包括:为完成各种任务而需要在飞机上装载的任务设备。
移动信息数据采集解决方案
移动数据采集解决方案 由于移动终端的携带方便,信号覆盖广,操作便捷等优势,使得移动终端已经成为生活必带随身用品,人们对其给予了越来越高的关注与期望。 企业和政府依托移动终端,采用无线数据传输技术、定位技术、通过事件分类编码体系、地理编码体系,形成科学的数据采集和更新机制,完成对流程、管理问题的表单、图像、声音和位置信息实时传递,实现精确、快捷、高效、可视化、全时段、全方位覆盖的管理模式,实现应用与管理方式的多样化。 一、移动终端应用分析 传统的数据采集方式的问题: 依赖于纸质表格和手工填报,之后输入至相关的计算机系统。这样的操作方式存在很多问题,如手段单一、数据传递不及时、无法确认数据采集的地理位置、时间等。 数据质量难以保证。 数据采集的过程无法监控。 大量繁杂的事后录入工作,不但增加了工作量,录入错误的几率也很高。
传统数据获取方式的问题: 要求复杂的数据交互,同时兼顾现场数据查询和数据录入。 需要固定场所、固定布局的企业和政府信息化建设。 人们需要在企业、政府的内网完成数据查询与阅览。而随时随地的获取所需信息至关重要。人们不可能将海量数据带在身边,尤其是当这些数据存储在内网的数据库中的时候。 二、数据采集解决方案 移动数据采集系统以移动终端为载体,结合2G/3G等移动通信网络,建立起一套可移动化的信息系统,通过将企业、政府的内部办公、业务系统扩展到移动终端的方式,帮助用户摆脱时间和空间的限制,使用户随时随地关联内网系统,获取所需任务与信息,按照标准化的工作流程,快速执行采集任务的填报工作,完成对文字、表单、图像、声音和位置信息的采集和实时传递,保证采集任务的快速构建和及时传输、摆脱地域性和网络资源设备的限制,实现精确、快捷、高效、可视化的数据采集模式。 通过整合移动数据采集、信息查询、第三方系统等,形成一套完备的移动应用平台,终端应用可完成数据录入、查询展示等功能,后台管理系统用于接收终端上报的采集数据、管理任务分类和派发、查看任务进展、信息反馈、数据统计、分析和展示以及工作监督等相关工作。