【CN209486883U】一种低功耗数据采集系统【专利】
(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号 (45)授权公告日 (21)申请号 201920460114.2
(22)申请日 2019.04.08
(73)专利权人 北京航天拓扑高科技有限责任公
司
地址 100176 北京市大兴区北京经济技术
开发区永昌南路21号
(72)发明人 史翔 刘涛 郭东 张晓烨 崔瑶
王之海 唐淼 谭金彪 许明
张祎 王猛 靳志军 张安英
张丽 关超
(74)专利代理机构 北京国林贸知识产权代理有
限公司 11001
代理人 李瑾 李连生
(51)Int.Cl.
G08C 17/02(2006.01)
(54)实用新型名称
一种低功耗数据采集系统
(57)摘要
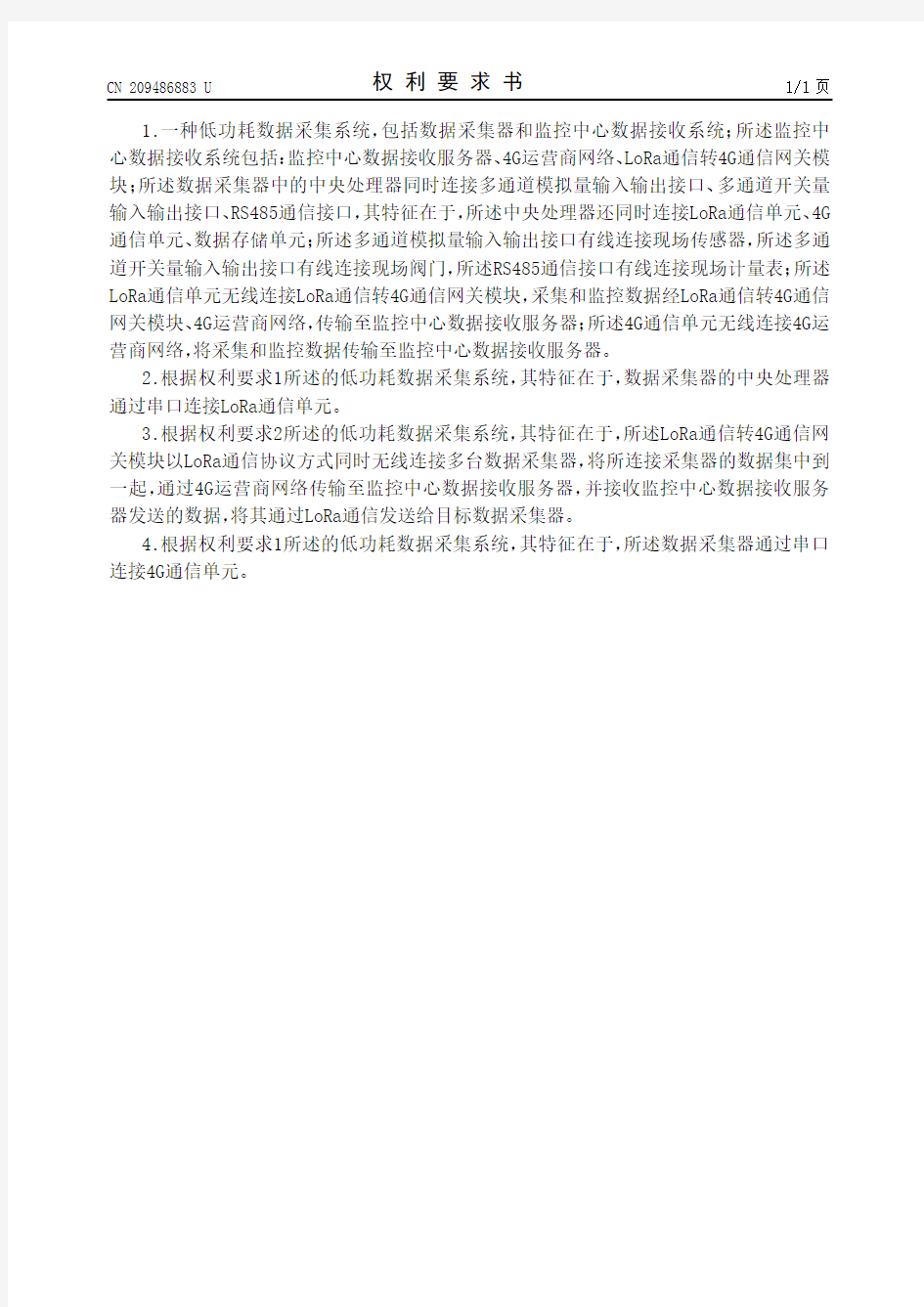
本实用新型公开了一种低功耗数据采集系
统,包括数据采集器和监控中心数据接收系统;
数据采集器中的中央处理器同时连接多通道模
拟量输入输出接口、多通道开关量输入输出接
口、RS485通信接口、LoRa通信单元、4G通信单元、
数据存储单元,多通道模拟量输入输出接口有线
连接现场传感器,多通道数字量输入输出接口有
线连接现场阀门,RS485通信接口有线连接现场
计量表,LoRa通信单元无线连接LoRa通信转4G通
信网关模块,4G通信单元无线连接4G运营商网
络。本实用新型适用于燃气、热力、电力、水务等
能源管网的生产运行数据监控,系统的低功耗性
能适用于工业现场没有市电供应的工作条件。权利要求书1页 说明书3页 附图1页CN 209486883 U 2019.10.11
C N 209486883
U
权 利 要 求 书1/1页CN 209486883 U
1.一种低功耗数据采集系统,包括数据采集器和监控中心数据接收系统;所述监控中心数据接收系统包括:监控中心数据接收服务器、4G运营商网络、LoRa通信转4G通信网关模块;所述数据采集器中的中央处理器同时连接多通道模拟量输入输出接口、多通道开关量输入输出接口、RS485通信接口,其特征在于,所述中央处理器还同时连接LoRa通信单元、4G 通信单元、数据存储单元;所述多通道模拟量输入输出接口有线连接现场传感器,所述多通道开关量输入输出接口有线连接现场阀门,所述RS485通信接口有线连接现场计量表;所述LoRa通信单元无线连接LoRa通信转4G通信网关模块,采集和监控数据经LoRa通信转4G通信网关模块、4G运营商网络,传输至监控中心数据接收服务器;所述4G通信单元无线连接4G运营商网络,将采集和监控数据传输至监控中心数据接收服务器。
2.根据权利要求1所述的低功耗数据采集系统,其特征在于,数据采集器的中央处理器通过串口连接LoRa通信单元。
3.根据权利要求2所述的低功耗数据采集系统,其特征在于,所述LoRa通信转4G通信网关模块以LoRa通信协议方式同时无线连接多台数据采集器,将所连接采集器的数据集中到一起,通过4G运营商网络传输至监控中心数据接收服务器,并接收监控中心数据接收服务器发送的数据,将其通过LoRa通信发送给目标数据采集器。
4.根据权利要求1所述的低功耗数据采集系统,其特征在于,所述数据采集器通过串口连接4G通信单元。
2
最高效的四旋翼无人机数据采集建模
最高效的四旋翼无人机 数据采集建模 CKBOOD was revised in the early morning of December 17, 2020.
最高效的四旋翼无人机数据采集建模 一、简介 近年来,微小型四翼无人机已经成为了无人飞行器研究领域的一个热点。它结构简单、机动性强、便于维护,能够在空中悬停、垂直起飞和降落。在军用和民用方面具有较大的潜在应用价值,国内外许多研究单位纷纷致力于四旋翼无人机飞行控制的架构设计与飞行控制研究,以实现四旋翼无人机的自主飞行。机载传感器系统是四旋翼无人机飞行控制系统的重要组成部分,它为机载控制系统提供可靠的飞行状态信息,是实现四旋翼无人机自主飞行的重要设备。 现在无人机应用最广的是倾斜摄影技术优势或者说最吸引用户的,就是利用倾斜摄影技术可以全自动、高效率、高精度、高精细的构建地表全要素三维模型。 二、四旋翼无人机特点 1、机动性能灵活,低空性能出色。能在城市、森林等复杂环境下完成各种任务。可完成空中悬停监视侦查。实现对动力要地低,能在狭小空间穿行,能垂直起降,对起降环境要求低。 2、对动力要求较小,产生的噪音低,隐蔽性能高,安全性能出色。四旋翼无人机采用四个马达提供动力,可使飞行更加稳定和精确。 3、结构简单,运行、控制原理相对容易掌握。 4、成本较低,零件容易更换,维护方便。
三、飞行软件 目前无人机种类繁多,针对无人机开发的飞控软件也有很多,目前比较好用的是DJI GS Pro、DJI GO4、Litchi Vue、Pix4d等。 四、数据采集,使用DJI GS pro 1、打开DJI GS pro软件,点击新建任务 2、点击测绘航拍区域模式 3、点击地图选点(飞行定点比较耗飞机电量,无特殊情况建议不使用) 4、点击屏幕就会出现一个航测区域,手动拖拽四个定点可以改变航测的面积和形状,同时也可以手动增加拐点,让航测面积更加的灵活多样。并且在右边的菜单栏里选择好对应的云台相机;设置好任务的高度,任务的高度和拍摄的清晰度,成图的分辨率有很大的关系;大面积的时候尽量选择等时间拍照,因为能上传的航点是有限的。 5、点击进入右侧菜单的高级选项之中,重新设置一下航测的重叠了,一般航向和旁向重叠率是700%和70%(最好不要低于70%);设置好云台俯仰角,正射影像图一般为-90°,拍摄3D立体时一般为-45°;设置好返航高度,确保返航时不会碰撞到障碍物。 6、点击右上角飞机左边更多选项,点击高级设置(地图优化限中国大陆地区使用打开);这点也是最关键的一点,这时候一定要点开中国大陆这个选项,不然飞行器的位置是偏移的。会导致航测任务区域整体偏移,有一部分任务没有拍摄到。
浅谈输电线路巡视中无人机的应用
浅谈输电线路巡视中无人机的应用 近年来,我国电力行业的发展规模不断的扩大,无论其输电网还是输配电设备都呈不断增加的趋势,这无形中也增加了巡视的工作量。单纯依靠运行人员的巡视已无法满足当前电力行业发展规模的要求。在这种情况下,运行维护部门也加大了在实践工作中的探索力度,开始转变思路,提出了状态巡视的思想。本文对现阶段输电线路巡视的主要问题进行了分析,同时对国内小型无人机的应用发展进行了介绍,并一步对小型无人机在输电线路巡视中的应用进行了具体的阐述。 标签:电力系统;输电线路;无人机;巡视 前言 当前人们用电量的不断增加,对电力系统的稳定性和安全性有了更高的要求,但电力系统的正常运行,离不开对输电线路的运行和维护工作。这是确保电网稳定运行的基础,所以需要加强对输电线路的建设工作。以安全第一、预防为主的原则来确保输电线路运行的稳定性,这就需要运行维护部门需要在日常工作中做好线路的巡视、检测、维修和管理工作,利用先进的技术,不断在工作中积累经验,从而使线路能够保证在安全运行的状态。 1 现阶段输电线路巡视的主要问题 1.1 输电线路巡视检查的主要内容 1.1.1 线路本体。地面与基面:回填土下沉或缺土、水淹、冻胀、堆积杂物;杆塔基础:破损、酥松、露筋、基础下沉、保护帽破损等;接地装置:断裂、严重锈蚀、螺栓松脱、接地带丢失、接地带外露等;拉线及基础:拉线金具等拆卸、拉线棒严重锈蚀或蚀损、拉线松弛、断股等;绝缘子:伞群破损、严重污秽、有放电痕迹、弹簧销、钢帽破损等;导线、地线、引流线、屏蔽线、OPGW的散股、断股、断线、放电烧伤、悬挂漂浮物、弧垂过大或过小、严重锈蚀、覆冰、舞动、风偏过大、对交叉跨越物距离不够等;线路金具:线夹断裂、裂纹、磨损、销钉脱落或严重锈蚀,均压环、屏蔽环、螺栓松动,防震锤跑位等。 1.1.2 附属设施。防雷装置:避雷器动作异常、计数器失效、破损、变形、引线松脱等;防鸟装置:鸟刺的破损、变形、螺栓松脱等;各种监测装置:缺失、损坏、功能失效等;杆号、警告、防护、指示、相位等标识的缺失、损坏、字迹或颜色不清、严重锈蚀等;防雾防冰装置的缺失、损失等。 1.1.3 架空线路环境通道。建筑物、树木与导线的安全距离不足等;线下有危及线路安全的施工作业等;线路附近有烟火,有易燃、易爆物堆积等;采动影响区,地面出现裂缝、坍塌等情况;线路附近有危及线路安全的漂浮物等。
数据采集软件用户使用手册范本
省应急平台 数据采集软件用户使用手册 辰安科技股份 2020年6月
前言 省应急平台数据采集软件是省应急平台的配套软件,用于收集省应急平台的基础信息数据库、地理信息数据库、预案库、案例库、知识库和文档库等数据,地理信息数据库的地名库和专业地理专题图可通过本软件收集,其他地理信息数据和事件信息数据库、模型库的数据不通过本软件收集。
目录 1.第一章软件安装与启动 (1) 1.1光盘文件说明 (1) 1.2运行环境要求 (1) 1.3系统安装与卸载 (1) 1.3.1安装 (2) 1.3.2卸载 (8) 1.3.3可能问题 (9) 1.4软件启动 (10) 2.第二章数据录入 (11) 2.1选择数据类别 (11) 2.2录入界面简介 (12) 2.3添加记录 (13) 2.4保存记录 (15) 2.5删除记录 (17) 2.6关联数据录入 (17) 2.7扩展数据录入 (19) 3.第三章数据导航 (21) 3.1查找记录 (21) 3.2第一项记录 (22) 3.3前一项记录 (23) 3.4下一项记录 (24) 3.5最后一项记录 (24) 3.6数据列表区导航 (25) 4.第四章最佳实践 (27)
第一章软件安装与启动 1.1 光盘文件说明 光盘上的文件包括setup.bat、数据采集软件.msi文件、Access 2010 Runtime.exe文件,说明如下表: 1.2 运行环境要求 数据采集软件所需运行环境的最低要求如下表: 1.3 系统安装与卸载 如果机器已安装过本程序,请先卸载(参照 1.3.2 卸载),再安装(参照1.3.1)。
过程装备中数据采集系统的低功耗设计
收稿日期:2002 08 05 作者简介:黄志勇(1978 ),男,江西南昌人,硕士生,研究方向为便携式数据采集系统的开发与研制。 过程装备中数据采集系统的低功耗设计 黄志勇,邹久朋 (大连理工大学过程装备与控制工程系,辽宁大连116012) [摘 要] 从理论分析和实际应用两个方面阐述和讨论了低功耗大容量便携式数据采集仪的研制方案。主要从芯片的选型、外围电路的设计、软件设计等方面入手来分析如何使电池供电的数据采集系统长时间工作于无人看管的场所。 [关键词] 单片机;低功耗;外围电路;数据采集 [中图分类号]TM911 [文献标识码]A [文章编号]1000 0682(2003)01 0034 03 The Low dissipation design of a data acqusition system in process equipment HUANG Zhi yong,ZOU Jiu Peng (Proc ess Equi pment &Cont rol Engineering De pt o f DaLian U niversity o f Tec hnology ,Liaoning Dalian 116012,China ) Abstract:This paper expatiates on the method of designing a portable and large capacity microcontroller system with low power dissipation and discusses its development through both theoretic analysis and actual ap plications.Proceeding from the circuits,design,components and selection to software configuration,the paper analyses how the design conception can realize the function that keeps the battery operated data acquisition sys tem working for a long time at its working field without tenders. Key words:Microcontroller;Lo w power dissipation;Peripheral circuit;Data acquisition 1 前 言 由单片机组成的数据采集系统已经广泛的应用在过程装备的各个领域。通常在野外偏远地区、高温高压场所要进行压力、温度和应力等的数据采集时,由于没有持续的电力供给,而且工作温度有限制,不太适合使用笔记本电脑等设备进行数据采集,只能使用电池供电的数据采集系统。而一般情况下数据采集需持续几天到几个月,这样整个系统的功耗成为影响系统设计的关键问题。 2 低功耗的硬件设计 在实际应用中数据采集系统主要由传感器、A/ D 转换器、单片机、存储器、与微机接口电路等组成。除传感器外,设计人员基本上是选用低功耗C MOS 或HCMOS 型工艺制造的IC 。而CMOS 电路的功耗由静态功耗(Ps )和动态功耗(Pd )组成。静态功耗是在电路的所有输入信号保持状态不变时的直流功 耗。它包括PN 结反向漏电流引起的功耗和MOS 晶体管的亚阈电流引起的功耗。由于它一般在微安( A)量级[1],可以忽略。动态功耗是C MOS 电路在正常操作时所消耗的能量。它一般在毫安级(mA)。所以在低功耗设计时,应尽量减少动态功耗。 动态功耗Pd 是对电路节点负载电容进行充放电所消耗的功率。表示为: Pd =RC L V L V dd f (2 1) 式中:C L 负载电容; V L 逻辑摆幅;V dd 电源电压;f 工作频率; R 能量状态转换活动几率。 R 又简称 开关活动率 ,它是指节点一个周期内做耗能状态转换所用的时间与时钟周期之比,它的大小与电路结构、逻辑功能、输入数据的组合状态及节点的初始状态有关。一般情况下C MOS 电路的逻辑摆幅V L 与电源电压V dd 近似,故(2 1)式可简化为: P d =RC L V 2dd f (2 2) 由上式可知,降低动态功耗的主要途径是:降低耗能状态转换活动几率、减少负载电容、降低工作电 34 工业仪表与自动化装置 2003年第1期
输电线路无人机巡视分析及推广应用刘荣
输电线路无人机巡视分析及推广应用刘荣 摘要:我国经济发展水平的提升促使我国的电力行业迎来发展契机,随着输电 线路分布的愈发广泛,实现我国供电范围的不断扩大。但是因自然条件等因素限制,使得部分地区输电线路无法依靠人工巡检方式完成,并且现阶段人工巡检方 式的应用已经无法满足当前输电线路稳定运行具体需求。所以,需要借助无人机 巡检技术来完善巡检工作,避免巡检期间受到地理、气温、天气等条件影响,提 高故障巡查精准度,实现输电线路整体运行情况的全面掌握。也正因此,进行无 人机巡检技术应用的深入分析,具有至关重要的现实意义。 关键词:输电线路;无人机巡视;推广;应用 1?输电线路巡视内容阐述 巡检工作内容具体包括对线路本体、附属设施、电力设备、所处环境的检查 与巡视,明确掌握巡查范围内输电线路的具体运行情况,对输电线路运行期间存 在的故障问题第一时间发现并上报,为线路的稳定可靠运行提供保障。现阶段输 电线路巡查作业开展,具体包括故障巡视、正常巡视以及特殊巡视3种方式,在 以往工作期间,无论开展哪种类型巡视,所采用的模式均为人工地面巡查,只有 在突发特殊情况时,才会出现人员灯塔巡视的情况,此巡查模式的应用无法发挥 出巡检工作的最大作用与功能。传统人工巡检方式的应用,无法与现阶段不同运 行状况线路的不同巡视要求相契合,影响到巡检工作开展有效性,无法帮助电力 企业精确且及时的获取输电线路的具体运行状态与情况,不仅造成人力资源的浪费,甚至对输电线路的稳定、安全运行产生影响。 2输电线路巡视中无人机应用的重要性 无人机技术是通过无线电技术对不载人飞行器进行远程控制的技术,无人机 本身具有成本低、易控制、小巧灵活等特点,因此在不同的领域都得了广泛应用,尤其在输电线路巡视中应用的效果更为突出。 输电线路巡视中应用无人机可以极大地提高巡视效率,减少电力企业对于巡 视资金的投入,在巡视过程中只需调动一小部分人和无人机即可,无需像传统的 巡视那样耗费大量物力、人力。在人工巡视过程中需要用到高空架线,因此导致 了费用大大提高,使用无人机进行巡视,一次性可使用4h,进行长达30km的线 路巡视,相当于30个巡视人员一天的工作量,且面对复杂地形时不会受其影响,不仅有效缩短了工作时间,还减少了巡视工作的费用,为企业带来了更大的利润。采用无人机进行输电线路巡视,发现的问题较为准确,且可以及时通知相关部门 进行仔细查看。无人机还可以对输电线路周围的树木、建筑进行排查,防止出现 违规违章建筑、植被,从而使输电线路的安全运行得到更好的保障,防止恶劣环 境对线路巡视造成影响。此外,无人机相对于人工巡视而言,范围更加广、更加 全面,能从多角度进行巡视,如果遇到雷击等自然灾害造成的故障,无人机可以 在空中及时发现故障位置,极大地提高了巡视效率和质量,减少了巡视人员的工 作量。 3无人机输电线路巡视方面面临的问题 无人机输电线路巡视方面的应用还处在初期,没有成型的工作模式可遵循, 需要在实践中不断的摸索和总结。无人机应用方面面临的问题主要表现在如下方面: 3.1需加强对无人机应用技术人才的培养 无人机应用技术人才是无人机实现输电系统巡视作业的关键,不仅仅要实现
第三章 空间数据采集与处理练习..
一、单选题 1、对于离散空间最佳的内插方法 是: A.整体内插法 B.局部内插法 C.移动拟合法 D.邻近元法 2、下列能进行地图数字化的设备 是: A.打印机 B.手扶跟踪数字化仪 C.主 机 D.硬盘 3、有关数据处理的叙述错误的 是: A.数据处理是实现空间数据有序化的必要过程 B.数据处理是检验数据质量的关键环节 C.数据处理是实现数据共享的关键步骤 D.数据处理是对地图数字化前的预处理 4、邻近元法 是: A.离散空间数据内插的方法 B.连续空间内插的方法 C.生成DEM的一种方法 D.生成DTM的一种方法 5、一般用于模拟大范围内变化的内插技术是: A.邻近元法 B.整体拟合技术 C.局部拟合技术 D.移动拟合法 6、在地理数据采集中,手工方式主要是用于录入: A.属性数据 B.地图数据 C.影象数 据 D.DTM数据
7、要保证GIS中数据的现势性必须实时进行: A.数据编辑 B.数据变换 C.数据更 新 D.数据匹配 8、下列属于地图投影变换方法的 是: A.正解变换 B.平移变换 C.空间变 换 D.旋转变换 9、以信息损失为代价换取空间数据容量的压缩方法是: A.压缩软件 B.消冗处理 C.特征点筛选 法 D.压缩编码技术 10、表达现实世界空间变化的三个基本要素是。 A. 空间位置、专题特征、时间 B. 空间位置、专题特征、属性 C. 空间特点、变化趋势、属性 D. 空间特点、变化趋势、时间 11、以下哪种不属于数据采集的方式: A. 手工方式 B.扫描方式 C.投影方 式 D.数据通讯方式 12、以下不属于地图投影变换方法的是: A. 正解变换 B.平移变换 C.数值变 换 D.反解变换 13、以下不属于按照空间数据元数据描述对象分类的是: A. 实体元数据 B.属性元数据 C.数据层元数据 D. 应用层元数据 14、以下按照空间数据元数据的作用分类的是: A. 实体元数据 B.属性元数据 C. 说明元数据 D. 分类元数据 15、以下不属于遥感数据误差的是: A. 数字化误差 B.数据预处理误差 C. 数据转换误差 D. 人工判读误差
34970A数据采集器中文说明书
Agilent34970A 数据采集仪基本操作实验 一、实验目的 1.了解Agilent34970A数据采集仪的基本结构和功能。 2.了解Agilent34901A测量模块的基本功能和工作原理。 3.学习Agilent34970A数据采集仪使用面板进行数据采集的方法。 二、实验要求 1.根据Agilent34970A数据采集仪用户手册,掌握各开关、按钮的功能与作用。 2.通过Agilent34901A测量模块,分别对J型热电偶、Pt100、502AT热敏电组、直流电压、直流电流进行测量。 三、实验内容与步骤 1.实验准备 Agilent34970A数据采集仪的基本功能与性能。Agilent 34970A数据采集仪是一种精度为6位半的带通讯接口和程序控制的多功能数据采集装置,外形结构如图1、图2所示:
其性能指标和功能如下: 1.仪器支持热电偶、热电阻和热敏电阻的直接测量,具体包括如下类型: 热电偶:B、E、J、K、N、R|T型,并可进行外部或固定参考温度冷端补偿。 热电阻:R0=49?至?,α=(NID/IEC751)或α=的所有热电阻。 热敏电阻:k?、5 k?、10 k?型。
2.仪器支持直流电压、直流电流、交流电压、交流电流、二线电阻、四线电阻、频率、周期等11种信号的测量。 3.可对测量信号进行增益和偏移(Mx+B)的设置。 4.具有数字量输入/输出、定时和计数功能。 5.能进行度量单位、量程、分辨率和积分周期的自由设置。 6.具有报警设置和输出功能。 7.热电偶测量基本准确度:℃,温度系数:℃。 8.热电阻测量基本准确度:℃,温度系数:℃。 9.热敏电阻测量基本准确度:℃,温度系数:℃。 10.直流电压测量基本准确度:+(读数的℅+量程的℅)。 11.直流电流测量基本准确度:+(读数的℅+量程的℅)。 12.电阻测量基本准确度:+(读数的℅+量程的℅)。 13.交流电压测量基本准确度:+(读数的℅+量程的℅)(10Hz~20kHz 时)。 14.交流电流测量基本准确度:+(读数的℅+量程的℅)(10Hz~5kHz 时)。 15.频率、周期测量基本准确度:(读数的℅)(40Hz~300kHz时)。16.具有系统状态、校准设置和数据存储等功能。 Agilent34970A 数据采集仪的面板按钮功能与作用。 1. 在所显示的通道上配置测量参数:
基于PDA的地下管线数据采集系统
基于PDA的地下管线数据采集系统 1、管线普查现状存在的主要问题 1)目前管线普查所采用的基本流程图(图1) 2)管线普查中目前存在的主要问题 (1)手工纸质记录维护难度大、查找困难: 由于纸质记录的局限性,当数据量增大时,对图纸记录维护和查询将变得越来越来困难,如果作业小组的草图没有及时的建立成内业数据库,则重号、错连、漏入等人为出错几率会直线增加。 (2)由外业管线探测到内业建立数据库,中间环节多,出错几率大:现有的管线普查流程可以看出,由外业管线探测到内业建立数据库,白天外业采集作业,晚上内业加班录入数据,现在还有的做法是同一管线属性(如埋深、管径数值型属性)事先记录在草图上,再由草图抄写管线探测手簿,然后根据管线探测手簿由内业人员建立成管线数据库,管线属性和连接关系至少经过两到三道工序才能建立到数据库中,在不同人员,不同工序的影响下,加大了的数据出错的几率。 (3)填写管线探测手簿与内业建库加大了内业处理工作量: 由于管线外业探测的不确定性,同一管线属性可能会多次进行修改,此过程在整个管线普查的过程持续存在。因此对每一项管线属性的修改必须同时修改草图、数据库、管线探测手簿,特别是对管线探测手簿的填写,平均必须抄写两遍以上或更多,加大了内业处理工作量。 (4)项目部无法对作业进度和各物探小组的作业情况进行全面跟踪掌握:对于纸质记录的外业管线探测手簿,如果没有及时进行整理或内业没有及时录入到数据库中,则项目部无法对实际已经完成的物探外业工作量进行情细的统计与查询,也无法对各物探小组每天的工作情况进行细致全面的进行跟踪了解。 2、系统总体介绍 1)为什么要采用PDA方式进行数据采集
基于Zigbee的低功耗数据采集系统设计
密级一般 分类号TP393硕士学位论文 作者:杨朋伟 指导教师:侯宏录教授 申请学位学科: 2009年4月20日 XI’ANTECHNOLOGICAL UNIVERSITY 基于Zigbee的低功耗数据采集系统设计 测试计量技术及仪器 题目:
基于Zigbee的低功耗数据采集系统设计 学科:测试计量技术及仪器 研究生签字: 指导教师签字: 摘要 Zigbee无线传感器网络技术是一种全新的短距离无线通信技术,广泛应用于智能控制、无线监控及环境监测等领域。目前,对于Zigbee无线传感器网络技术的应用还存在诸多问题,本文重点对无线传感器网络时间同步算法、低功耗系统设计开展深入研究。 1.对Zigbee无线传感器网络时间同步算法进行了全面分析研究,从降低同步开销和关键路径长度的角度出发,提出了两种应用于不同环境下的时间同步算法。1)当网络规模较小时,采用二层拓扑结构的Zigbee时间同步算法,该算法通过构造二层拓扑结构和时延估计的方法实现了ms级的时间同步精度.降低了时间同步开销;2)当网络规模较大时,采用多跳传感器网络时间同步算法,该算法通过构造较优拓扑结构和累计时延估计的办法降低了时间同步开销及关键路径长度。 2.通过对Zigbee协议栈的研究及分析,从低功耗设计的角度出发,完成了Zigbee低功耗无线数据采集及传输系统设计。主要内容包括如下几个方面: 1)完成了Zigbee无线网络节点的电路设计及相关应用电路设计,在此基础上,应用IAR7.20H开发平台完成了Zigbee无线网络节点的功能软件设计。 2)使用TI公司的CC2430芯片完成了Zigbee节点点对点无线通信的设计及Zigbee 简单网络节点通信设计。 3)完成了多路传感器数据采集接口的设计及Zigbee无线网络监控管理软件设计。 4)研究了无线网络节点功能软件的低功耗设计方法。 5)搭建了Zigbee低功耗无线数据采集及传输系统,对其进行了调试和实验,结果表明该系统在70m范围内工作稳定,误码率较低,时间同步精度较高,能够满足工业环境下的参数远程监控。 关键词:数据采集及传输;低功耗;无线传感器网络;时间同步算法;Zigbee
无人机电力巡线
无人机电力巡线 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
无人机电力巡检 无人机(unmannedaerialvehicle,UAV)是一种先进的无人驾驶自行飞行器。无人机输电巡线系统是一个复杂的集航空、输电、电力、气象、遥测遥感、通信、地理信息(GIS)、图像识别、信息处理的一体系统,涉及飞行控制技术、机体稳定控制技术、数据链通讯技术、现代导航技术、机载遥测遥感技术、快速对焦摄像技术以及故障诊断等多个高尖技术领域。现代无人机具备高空、远距离、快速、自行作业的能力,可以穿越高山、河流对输电线路进行快速巡线,对架空线的铁塔、支架、导线、绝缘子、防震锤、耐张线夹、悬垂线夹等进行全光谱的快速摄像和故障监测。 中文名:无人机电力巡检 外文名:UAV? electricpowerinspection 目录 简介 背景 无人机巡线优势 发展前景 简介 无人机自身具有携带方便、操作简单、反应迅速、载荷丰富、任务用途广泛、起飞降落对环境的要求低、可自主飞行等优势。 将无人机应用到电力巡线方面可大大提高电力维护和检修的速度和效率,使许多工作能在完全带电的环境下迅速完成,确保了用电安全;采用无人机进
行常规输电线路巡查,可降低劳动强度,与有人直升机巡线相比,可提高巡线作业人员的安全性,并且降低了成本;且无人机巡线速度快、应急瞬速,能及时发现缺陷,及时提供信息,避免了线路事故停电,挽回了高额的停电费用损失。 通过旋翼和固定翼无人机联合线路巡检,即可实现对输电线路走廊的大范围快速普查,又可高效获取高清晰度线路设备照片,清晰分辨出常见输电线路的缺陷,大大增强输电线路巡检效率,为现代化输电线路维护工作提供了一种先进的、有实用价值的技术手段。利用无人机搭载可见光拍摄红外、紫外检测等任务,机载设备对输电线路进行飞行巡检,并实时将现场情况回传地面监控系统,以便作出正确判断及时排除线路故障,还可围绕目标进行360度全方位拍摄,做到零死角。 背景 随着我国经济的快速发展,社会对电力能源提出了巨大需求。我国目前已形成华北、东北、华东、华中、西北和南方电业共6个跨省区电网,110KV以上输电线路已达到近万km,为满足社会需求,国家电网正在进行超高压大容量电力线路扩建,线路将穿越各种复杂地形,如何解决电力线路检测的精度和效率,是困扰电力行业的重大难题。 针对高压输电线路的运行管理模式和常规作业方式,表明传统巡线方式面临的困难有:劳动强度大、工作条件艰苦,而且劳动效率低,遇到电网紧急故障和异常气候条件下,线路维护人员不具备有利的交通优势、利用普通仪器或肉眼来巡查设施。这种方式已经不能完全适应现代化电网建设与发展的需求。超、特高压电网急需先进、科学、高效的电力巡线方式。
DCS数据采集及展现系统使用说明书
中粮生化能源有限公司信息系统工程DCS数据采集及展现系统使用说明书 哈尔滨工业大学慧通新意信息技术有限公司 HIT HUITON CINEE INFO & TECHNOLOGY CO.,LTD 2007年12月
版本说明 本手册是随同中粮ERP产品一同发布的,产品如有扩展,该手册中将不再体现。 版权声明 Copyright ? 2006 by 哈尔滨工大慧通新意信息技术有限公司 All rights reserved. 未经本公司书面许可,本书任何部分内容不得以任何方式抄袭、节录、翻印或传播。
目录 第1章阅读指南......................................... 错误!未定义书签。 手册内容结构......................................错误!未定义书签。 使用约定..........................................错误!未定义书签。第2章系统综述......................................... 错误!未定义书签。 关于本系统........................................错误!未定义书签。 系统操作角色......................................错误!未定义书签。 与其他系统的联系..................................错误!未定义书签。第3章公用功能说明..................................... 错误!未定义书签。 界面图标按钮说明..................................错误!未定义书签。 界面文字按钮说明..................................错误!未定义书签。第4章基础配置......................................... 错误!未定义书签。 功能概述..........................................错误!未定义书签。 测点信息..........................................错误!未定义书签。 功能概述......................................错误!未定义书签。 数据项说明....................................错误!未定义书签。 操作说明......................................错误!未定义书签。 机组信息..........................................错误!未定义书签。 功能概述......................................错误!未定义书签。 数据项说明....................................错误!未定义书签。 操作说明......................................错误!未定义书签。 颜色配置..........................................错误!未定义书签。 功能概述......................................错误!未定义书签。 数据项说明....................................错误!未定义书签。 操作说明......................................错误!未定义书签。 分组信息配置......................................错误!未定义书签。
数据采集系统
湖南工业大学科技学院 毕业设计(论文)开题报告 (2012届) 教学部:机电信息工程教学部 专业:电子信息工程 学生姓名:肖红杰 班级: 0801 学号 0812140106 指导教师姓名:杨韬仪职称讲师 2011年12 月10 日
题目:基于单片机的数据采集系统的控制器设计 1.结合课题任务情况,查阅文献资料,撰写1500~2000字左右的文献综述。 近年来,数据采集及其应用技术受到人们越来越广泛的关注,数据采集系统在各行各业也迅速的得到应用。如在冶金、化工、医学、和电器性能测试等许多场合需要同时对多通道的模拟信号进行采集、预处理、暂存和向上位机传送、再由上位机进行数据分析和处理,信号波形显示、自动报表生成等处理,这些都需要数据采集系统来完成。但很多数据采集系统存在功能单一、采集通道少、采集速率低、操作复杂、并且对操作环境要求高等问题。人们需要一种应用范围广、性价比高的数据采集系统,基于单片机的数据采集系统具有实现处理功能强大、处理速度快、显示直观,性价比高、应用广泛等特点,可广泛应用于工业控制、仪器、仪表、机电一体化,智能家居等诸多领域。总之,无论在那个应用领域中,数据采集与处理越及时,工作效率就超高,取得的经济效益就越大。 数据采集系统的任务,就是采集传感器输出的模拟信号转换成计算机能识别的信号,并送入计算机,然后将计算得到的数据进行显示或打印,以便实现对某些物理量的监测,其中一些数据还将被生产过程中的计算机控制系统用来控制某些物理量。 数据采集系统的市场需求量大,特别是随着技术的发展,可用数据器为核心构成一个小系统,而目前国内生产的主要是数据采集卡,存在无显示功能、无记忆存储功能等问题,其应用有很大的局限性,所以开发高性能的,具有存储功能的数据采集产品具有很大的市场前景。 随着电子技术的迅速发展,,一些高性能的电子芯片不断推出,为我们进行电子系统设计提供的更多的选择和更多的方便,单片机具有体积小、低功耗、使用方便、处理精度高、性价比高等优点,这些都使得越来越广泛的选用单片机作为数据采集系统的核心处理器。一些高性能的A/D转换芯片的出现也为数据采集系统的设计提供了更多的方便,无论是采集精度还是采样速度都比以前有了较大的提高。其中一些知名的大公司如MAXIM公司、TI公司、ADI公司都有推出性能比效突出的 A/D转换芯片,这些芯片普通具有低功耗、小尺寸的特点,有些芯片还具有多通道的同步转换功能。这些芯片的出现,不仅因为芯片价格便宜,能够降低系统设计的成本,而且可以取代以前繁琐的设计方法,提高系统的集成度。 数据采集器是目前工业控制中应用较多的一类产品,数据采集器的研制已经相当成熟,而且数据采集器的各类不断增多,性能越来越好,功能也越来越强大。 在国外,数据采集器已发展的相当成熟,无论是在工业领域,还是在生活中的应用,比如美国FLUKE公司的262XA系列数据采集器是一种小型、便携、操作简单、使用灵活的数据采集器,它既可单独使用又可和计算机连接使用,它具有多种测量
数据采集系统简介研究意义和应用
一前言 1.1 数据采集系统简介 数据采集,是指从传感器和其它待测设备等模拟和数字被测单元中自动采集信息的过程。数据采集系统是结合基于计算机(或微处理器)的测量软硬件产品来实现灵活的、用户自定义的测量系统。该数据采集系统是一种基于TLC549模数转换芯片和单片机的设备,可以把ADC采集的电压信号转换为数字信号,经过微处理器的简单处理而交予数码管实现电压显示功能,并且通过与PC的连接可以实现计算机更加直观化显示。 1.2 数据采集系统的研究意义和应用 在计算机广泛应用的今天,数据采集的在多个领域有着十分重要的应用。它是计算机与外部物理世界连接的桥梁。利用串行或红外通信方式,实现对移动数据采集器的应用软件升级,通过制订上位机(PC)与移动数据采集器的通信协议,实现两者之间阻塞式通信交互过程。在工业、工程、生产车间等部门,尤其是在对信息实时性能要求较高或者恶劣的数据采集环境中更突出其应用的必要性。例如:在工业生产和科学技术研究的各行业中,常常利用PC或工控机对各种数据进行采集。这其中有很多地方需要对各种数据进行采集,如液位、温度、压力、频率等。现在常用的采集方式是通过数据采集板卡,常用的有A/D 卡以及422、485等总线板卡。卫星数据采集系统是利用航天遥测、遥控、遥监等技术,对航天器远地点进行各种监测,并根据需求进行自动采集,经过卫星传输到数据中心处理后,送给用户使用的应用系统。 1.3 系统的主要研究内容和目的 本课题研究内容主要包括:TLC549的工作时序控制,常用的单片机编辑C语言,VB 串口通信COMM控件、VB画图控件的运用等。 本课题研究目的主要是设计一个把TLC549(ADC)采集的模拟电压转换成八位二进制数字数据,并把该数据传给单片机,在单片机的控制下在实验板的数码管上实时显示电压值并且与计算机上运行的软件示波器连接,实现电压数据的发送和接收功能。
无人机激光雷达扫描系统
Li-Air无人机激光雷达扫描系统 Li-Air无人机激光雷达扫描系统可以实时、动态、大量采集空间点云信息。根据用户不同应用需求可以选择多旋翼无人机、无人直升机和固定翼无人机平台,可快速获取高密度、高精度的激光雷达点云数据。 硬件设备 Li-Air无人机激光雷达系统可搭载多种类型扫描仪,包括Riegl, Optech, MDL, Velodyne等,同时集成GPS、IMU和自主研发的控制平台。 图1扫描仪、GPS、IMU、控制平台 无人机激光雷达扫描系统设备参数见表格1: 表格 1 Li-Air无人机激光雷达扫描系统 图2 八旋翼无人机激光雷达系统图3 固定翼无人机激光雷达系统 设备检校
公司提供完善的设备检较系统,在设备使用过程中,定期对系统的各个组件进行重新标定,以保证所采集数据的精度。 图1扫描仪检校前(左)扫描仪检校后(中)检校前后叠加图(右) 图4(左)为检校前扫描线:不连续且有异常抖动;图4(中)为检校后扫描线:数据连续且平滑变化;图4(右)为检校前后叠加图,红线标记的部分检校效果对比明显。 图5从左至右依次为校正前(侧视图)、校正后(侧视图)、叠加效果图图5(左)为检校前扫描线:不在同一平面;图4(中)为检校后扫描线:在同一平面;图4(右)为检校前后叠加图。 成熟的飞控团队 公司拥有成熟的软硬件团队以及经验丰富的飞控手,保证数据质量以及设备的安全性,大大节约了外业成本和时间。
图6无人机激光雷达系统以及影像系统 完善的数据预处理软件 公司自主研发的无人机系统配备有成套的激光雷达数据预处理软件Li-Air,该软件可对无人机实时传回的激光雷达数据进行航迹解算、数据生成、可视化等。 图7 Li-Air数据预处理功能 成功案例 2014年7月,本公司利用Li-Air无人机激光雷达扫描系统进行中关村软件园园区扫描项目,采集园区高清点云以及影像数据。飞行高度200m,点云密度约50点/平方米,影像地面分辨率为5cm。通过POS数据解算,完成对点云和影像数据的整合,得到地形信息和DOM等。
数据采集软件使用说明书
量表数据采集程序说明 (适用系统XP,2000,VISTA) 一.把量表用数据线连接到电脑,打开光盘数据包里面的“新版电脑采集程序”文件夹,再打开里面的“中文采集软件”文件夹,然后打开“FYData.exe”,出现如下窗口: 1→“打开”:打开原保存的测试数据记录;2→“保存”:保存当前的测试数据; 3→“预览”:打印预览;4→“打印”:打印; 5→“连接”:将量表的数据接口与计算机连接上; →“断开连接”:断开连接; 6→“提示”:数据超差时,出现“嘟”提示音; →“无提示”:数据超差时不提示; 7→“设置”:设置;详细说明见下文; 8→“退出”: 退出软件;
9→“清除”:删除所有已采集的数据; 10→“删除”:删除当前光标指定的数据; 11→“自动”:自动采样(采样时间在“setup”中设置); 12→“手动”:手动采样,按下此按钮,采样一次; 13→“序号”:采样序列号;14→“数据值”:采样数据值; 15→“误差值”:误差值=Value(数据值)-STD(标准值); 16→“P”:超差提示,“+NG”:超上公差;“-NG”:超下公差;“OK”: 在公差范围内,合格; 16→“4800”:显示的值是当前与计算机通信的连接速率; 17→“COM1”:显示与计算机连接的串口; 二.点击设置,出现如下界面: 操作者可以不填,自动采集间隔为2000毫秒每次,端口为连接电脑端口 三.点击公差进入公差设置,
单位:可选公制,英制 标准值:不能输入负数 上公差:输入上公差值 下公差:输入下公差值 注:拔出或者更换数据线时记得先点击“断开”,否则下次连接可能出现死机或者运行缓慢的情况。
数据采集系统数据库.
create table treaty_table ( TID INT identity(1,1, Tname varchar(20, F-route varchar(50, period int, filename varchar(50, Type_ID INT, constraint PK_TREATY_TABLE primary key (TID create table type_table ( Type_ID INT identity(1,1, typename varchar(20, bourse varchar(40, constraint PK_TYPE_TABLE primary key (Type_ID ; create table CY_table ( CY_ID INT identity(1,1, MF varchar(20, pt datetime, Type_ID INT, constraint PK_CY_TABLE primary key (CY_ID ; create table Time_table ( Time_ID INT identity(1,1, DATE DATETIME, constraint PK_TIME_TABLE primary key (Time_ID ; create table K_table ( Root_ID INT identity(1,1, Type_ID INT, period INT, date datetime, rootnum INT, constraint PK_K_TABLE primary key (Root_ID ; create table Min1_table ( Min1_ID INT identity(1,1, treaty_name varchar(20, date datetime, open money, Close money, Heigh money, low money, Vol money, OPI money, S money, constraint PK_MIN1_TABLE primary key (Min1_ID ; create table Min5_table ( Min5_ID INT identity(1,1, treaty_name varchar(20, date datetime, open money, Close money, Heigh money, low money, Vol money, OPI money, S money, constraint PK_MIN1_TABLE primary key (Min5_ID ; create table Min15_table ( Min15_ID INT identity(1,1, treaty_name varchar(20, date datetime, open money, Close money, Heigh money, low money, Vol money, OPI money, S money, constraint PK_MIN1_TABLE primary key (Min15_ID ; create table Min30_table ( Min30_ID INT identity(1,1, treaty_name varchar(20, date datetime, open money, Close money, Heigh money, low money, Vol money, OPI money, S money, constraint PK_MIN1_TABLE primary key (Min30_ID ; create table Hour1_table ( H our1_ID INT identity(1,1, treaty_name varchar(20, date datetime, open money, Close money, Heigh money, low money, Vol money, OPI money, S money, constraint PK_MIN1_TABLE primary key (Hour1_ID ; create table Hour4_table ( Hour4_ID INT identity(1,1, treaty_name varchar(20, date datetime, open money, Close money, Heigh money, low money, Vol money, OPI money, S money, constraint PK_MIN1_TABLE primary key (Hour4_ID ; create table Day_table ( Day_ID INT identity(1,1, treaty_name