实验六-相位干涉仪测向技术
学 院 通信工程学院 专 业 信息对抗技术 指导教师 雷老师/闽红老师
学生
邓斌
学 号
11073115
实验日期
2014.05.
实验六 相位干涉仪测向技术
一、实验目的
无线电测向和定位就是确定通信辐射源的来波方向和位置。对通信信号的测向和定位是通信侦察对抗领域的一个重要且相对独立的技术领域。干涉仪测向又称为相位法测向。本实验主要目的为通过实验,了解并掌握通信测向中相位法测向的基本原理和方法。
二、实验原理
1、相位干涉仪测向原理
图 1
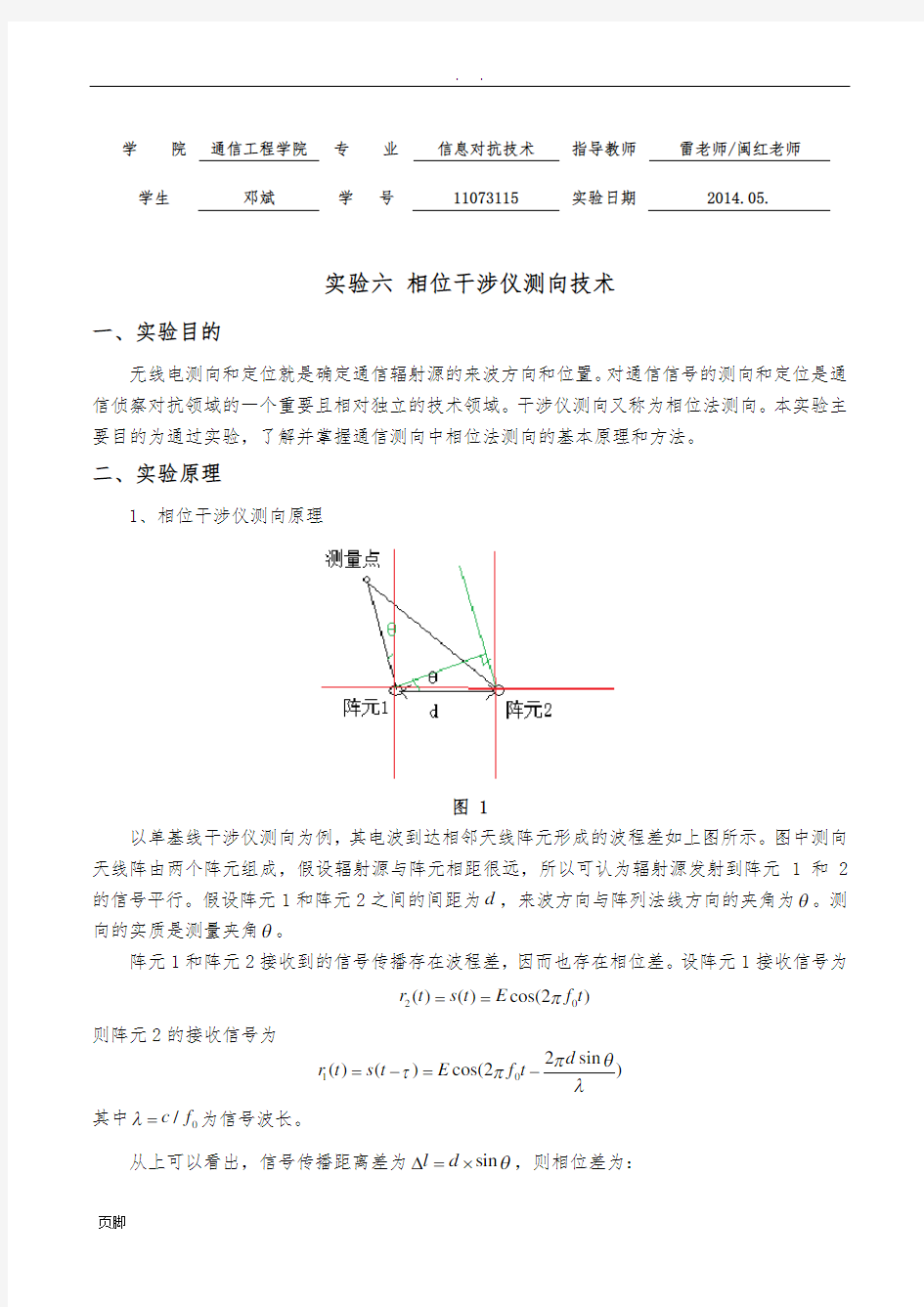
以单基线干涉仪测向为例,其电波到达相邻天线阵元形成的波程差如上图所示。图中测向天线阵由两个阵元组成,假设辐射源与阵元相距很远,所以可认为辐射源发射到阵元1和2的信号平行。假设阵元1和阵元2之间的间距为d ,来波方向与阵列法线方向的夹角为θ。测向的实质是测量夹角θ。
阵元1和阵元2接收到的信号传播存在波程差,因而也存在相位差。设阵元1接收信号为
20()()cos(2)r t s t E f t π==
则阵元2的接收信号为
102sin ()()cos(2)d r t s t E f t πθ
τπλ
=-=-
其中0/c f λ=为信号波长。
从上可以看出,信号传播距离差为θsin ?=?d l ,则相位差为:
λθπ?/sin 2??=?d
实际中d 、λ均已知,所以只要得到阵元1和2接收信号的相位差,便可以求出θ。需要注意的是,为了避免相位模糊问题,常需要满足条件π?
2、时域干涉仪测向方法
将12(),()r t r t 改写为复数形式得:
021()j f t r t Ee π= 0(2)2()j f t r t Ee π?-=
其中2sin /d ?πθλ=。
对1()r t 取共轭得
02*1()j f t r t Ee π-=
将*1()r t 与2()r t 相乘得
*221()()j r t r t E e ?-=
对上式求相角,再乘以/2d λπ-可得
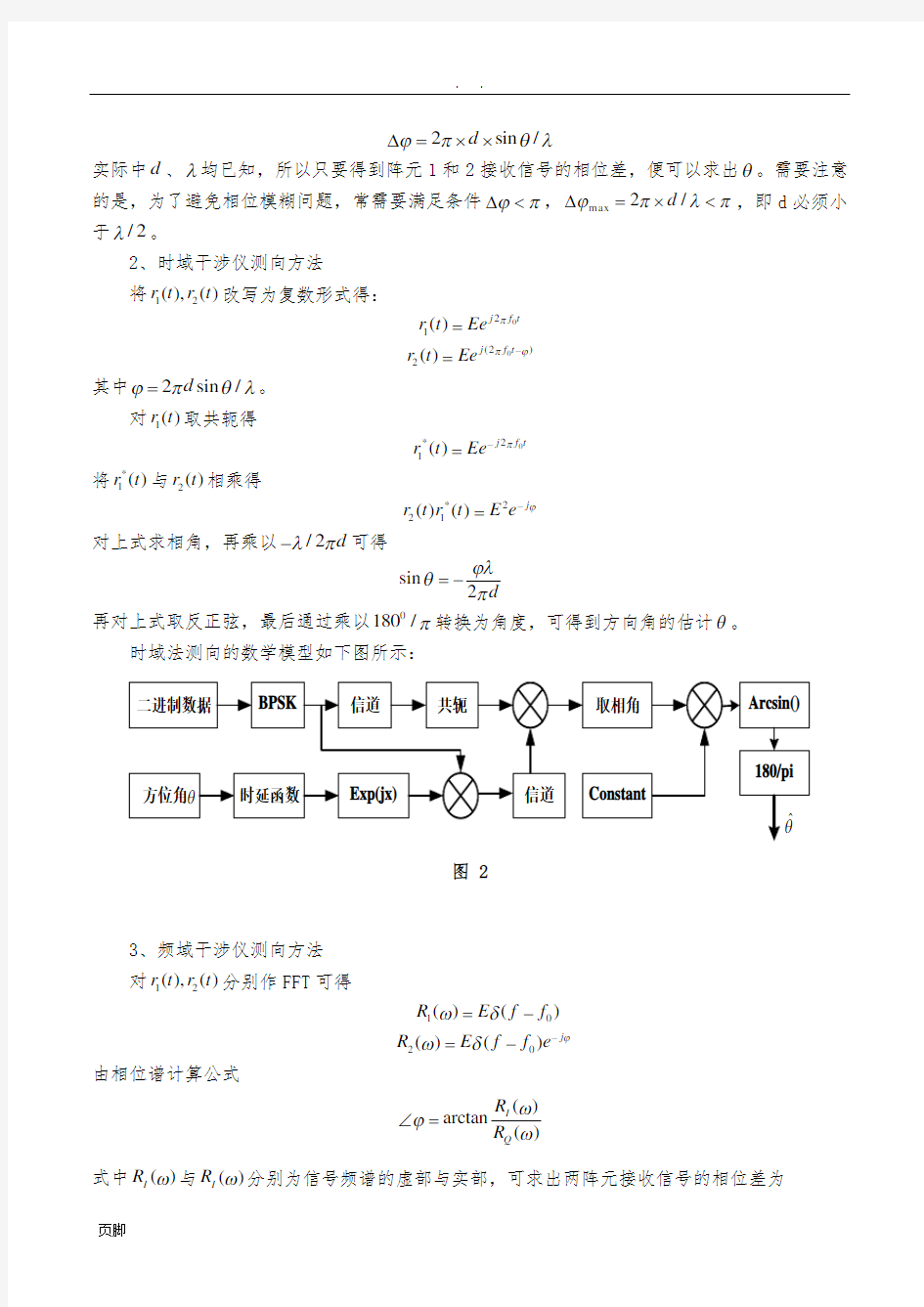
再对上式取反正弦,最后通过乘以0180/π转换为角度,可得到方向角的估计θ。
时域法测向的数学模型如下图所示:
图 2
3、频域干涉仪测向方法 对12(),()r t r t 分别作FFT 可得
10()()R E f f ωδ=-
20()()j R E f f e ?ωδ-=-
由相位谱计算公式
()
arctan
()
I Q R R ω?ω∠= 式中()I R ω与()I R ω分别为信号频谱的虚部与实部,可求出两阵元接收信号的相位差为
sin 2d
?λπθ=-
21
21
()()
arctan arctan
()()
I I
Q Q
R k R k
R k R k
?=-
然后可采用前述相同的方法得到方向角的估计θ。
频域法测向的数学模型如下图所示:
双信道
接收机
A/D变换
A/D变换
FFT变换
FFT变换
相位延迟
计算与综
合处理
方位计
算与综
合处理0
cos(2)
E f t
π
cos(2)
E f t
π?-
1
()
r n
2
()
r n2()
R k
1
()
R k
???θ
图 3
三、Simulink框图说明及参数设计:
A.模型框图:
图 4
其中Subsystem如图 5
图 5
Subsystem1如图 6
图 6
B.参数设计
Bernoulli模块参数
图 7
由于
2sin
d
πθ
?π
λ
=<
得,2
d
λ
<
, 由
m
f
c
5
3
8
10
3
10
1
10
3
?
=
?
?
=
=
λ
,可取1
d m
= . 则:
Subsystem1 Gain的参数
2
/1.5
d
pi
π
λ
-=-
;同理Gain1,Gain4的参数为
1.5/
2
pi
d
λ
π
-=-
.
Gain3和Gain5的参数:180/pi
四、仿真数据处理,图表及得出相关结论
假设: 0160θ= ;
0245θ= .
0160θ=
0245θ=
①由图得时域测向结果 O =98.591θ , O
=99.442θ;
测向误差%03.06098.59601=-=O O O ε, %02.04599.44452=-=O
O
O ε;
②由图得频域测向结果O =04.601θ , O
=03.452θ;
测向误差%
07.060
60.04-601==
O
O
O ε ,
%
07.045
45.03-452==
O
O
O ε.
偏振光干涉中的相位
偏振光干涉中o 光和e 光的相位 以课件上的问题为例: 设单色平面光波沿z 方向传播,即k //z : 1. 在偏振片P 1之后,晶片C 之前的光场是: )2cos(11z t e A E P λ πω?=r r 现在事先把它分解为o 光和e 光: )2cos( )()2cos()(11e e 1o o 1z t e e e A z t e e e A E P P λ πωλπω??+??=r r r r r r r (1) 这里1P e r 是沿偏振片P 1的偏振方向的单位矢量,o e r 和e e r 是o 光和e 光偏振方向的单位矢量,。上图表示出了所有的单位矢量,它们都在x -y 平面内。原则上讲,这些单位矢量的方向是可任意规定的,影响的只是它们之间点积的正负,但为了保证现在的o 光和e 光没有相位差,即cos 函数内不出现π(如果o e r 沿图中的反方向定义, 就会引起这个π),则o e r 、e e r 与1P e r 应保持上图所示关系。在上图的规定中,αcos )(1e =?P e e r r ,αsin )(1o =?P e e r r 。 2. 在晶片C 之后,偏振片P 2之前的光场是: )2cos()()2cos()(11e e 1o o 1z t e e e A z t e e e A E P P λ πωδλπω??++??=r r r r r r r (2) 与(1)式不同的是,(2)式中的o 光和e 光有了相位差δ,这是由晶片引起的。这时一般 y z k x
合成为椭圆偏振光。 3. 在偏振片P 2之后的光场是(对o 光和e 光,只有沿P 2方向的分量可通过): ) 2cos())(()2cos())((212212e e 1o o 1z t e e e e e A z t e e e e e A E P P P P P P λπωδλπω???++???=r r r r r r r r r r r 这时的情况是:振动都沿同方向-2P e r 方向的、相差恒定的两个波叠加,故可产生干涉。 具体分析相位,除了由晶片引起的δ,还存在可能由光矢量分解引起的π,表现在)(2o P e e r r ?和)(2e P e e r r ?差负号。在上面的情形中,的确引入了π的相位差。
实验六 相位干涉仪测向技术
学 院 通信工程学院 专 业 信息对抗技术 指导教师 沈雷老师/孙闽红老师 学生姓名 邓斌 学 号 11073115 实验日期 2014.05. 实验六 相位干涉仪测向技术 一、实验目的 无线电测向和定位就是确定通信辐射源的来波方向和位置。对通信信号的测向和定位是通信侦察对抗领域的一个重要且相对独立的技术领域。干涉仪测向又称为相位法测向。本实验主要目的为通过实验,了解并掌握通信测向中相位法测向的基本原理和方法。 二、实验原理 1、相位干涉仪测向原理 图 1 以单基线干涉仪测向为例,其电波到达相邻天线阵元形成的波程差如上图所示。图中测向天线阵由两个阵元组成,假设辐射源与阵元相距很远,所以可认为辐射源发射到阵元1和2的信号平行。假设阵元1和阵元2之间的间距为d ,来波方向与阵列法线方向的夹角为θ。测向的实质是测量夹角θ。 阵元1和阵元2接收到的信号传播存在波程差,因而也存在相位差。设阵元1接收信号为 20()()cos(2)r t s t E f t π== 则阵元2的接收信号为 102sin ()()cos(2)d r t s t E f t πθ τπλ =-=- 其中0/c f λ=为信号波长。 从上可以看出,信号传播距离差为θsin ?=?d l ,则相位差为:
λθπ?/sin 2??=?d 实际中d 、λ均已知,所以只要得到阵元1和2接收信号的相位差,便可以求出θ。需要注意的是,为了避免相位模糊问题,常需要满足条件π?
相位干涉仪测向
相位干涉仪测向 07083115 07083119 一、 题目要求 使用Simulink 模拟构建一个相位测向系统, 构造两个有时延的到来信号,对其进行捕获,分别在时域和频域上对接收的信号进行方向估计,并评估侧向效果。 二、 实验方案及公式推导 A. 公式推导 图 1 信号为0()cos(2)s t E f t π=,则如图 1所示天线长为d,信号方向与参考方向夹角为θ 设2点的接收信号为20()()cos(2)r t s t E f t π== (1) 则1点的接收信号为102sin ()()cos(2) d r t s t E f t πθ τπλ =-=- (2) 其中0 c f λ= 为信号波长 ①时域测向 将12(),()r t r t 改写为复数形式得 022()j f t r t Ee π= (3) 21()j f t r t Ee π?-= (4) 其中2sin d πθ ?λ =- 对(3)式取共轭得, 0 2*2()j f t r t Ee π-= (5) (4)式与(5)式相乘得, *212()()j r t r t E e ?-= (6)
对(6)式求相角,乘以2d λ π-得, sin 2d ?λ θ π= (7) 取反正弦,乘以0 180 π ,求出 θ ②频域测向 将(3)、(4)作FFT 得, 20()()R w E f f δ=- (8) 10()()j R w E f f e ? δ-=- (9) 由公式 ()arctan () I Q R k R k θ= 求出 2121()()arctan arctan () () I I Q Q R k R k R k R k ?=- (10) 同① ,可求出 θ B.方案论述 一、伯努利二进制码流经BPSK 产生2()r t 二、产生12()()j r t r t e ?-= 三、①时域法:*12()()r t r t 取出? ②频域法:对12(),()r t r t 作FFT,求出相位差? 四、根据?的值对应求出θ 三、Simulink 框图说明及参数设计: 依据方案的设计,建立Simulink 仿真模型 A.框图模块说明 : 相乘器 相加器 二进制数据流 高斯白噪声信道
干涉仪测向系统误差分析
龙源期刊网 https://www.360docs.net/doc/b710132485.html, 干涉仪测向系统误差分析 作者:李华龙 来源:《数字技术与应用》2011年第07期 摘要:本文根据干涉仪测向系统的测向原理,对基线的选择进行了分析,列出了影响测向结果的各项因素。分析了在试验条件允许的情况下,增加目标和测向系统间距离,将有助于从多个方面减小测向误差,提出了减小测向误差、提高测向精度的方法,取得了良好的试验结果。 关键词:干涉仪测向误差基线 中图分类号:TN98 文献标识码: A 文章编号:1007-9416(2011)07-0021-02 1、引言 无线电测向技术从二十世纪初开始出现,到现在已发展了上百年的时间,出现了各种各样的测向定位系统。目前根据测向体制划分主要有以下方法:比幅度法、相位法、多普勒法、时差测向法、空间谱估计测向法等方法。每一种测向方法都有其优点和缺点,测向体制的选择应根据不同的需要而确定,不存在最好的测向方法,而是在某种应用情况下必须考虑给定的环境条件下哪种方法能最好地满足要求。在车载平台中经常使用的是干涉仪测向系统。根据干涉仪测向基本原理可以得出单基线干涉仪测向系统的测向误差为: 即以下三大因素:波长测量精度(即频率测量精度)、选择的基线长度与信号波长的比值和测向设备的相位测量精度。还可以看出,在视场角范围内测向精度与信号的入射角有关,越靠近基线的垂直方向(小)测向精度越高。另外相关干涉仪测向有外场测试过程,因此在试验中测向天线阵场地和天线架设对最终的测向结果有很大的影响。 2、误差分析和改良 2.1波长测量精度 一般无线电侦察测向系统中,对频率测量误差要求在通信信号带宽的一半以内。在超短波频段,一般在系统中采用了运算速度较高的芯片组,通过FFT运算最后达到的测频精度为 5MHz/800=6.25kHz。 而系统工作频段为30~500MHz,因此将测频精度代入式(1)/中,其最大影响为0.2%。由此可见测频误差即使在单基线测量中对测向精度的影响也是很小的,因此在实际应用中一般可以忽略不计。以下为波长测量误差对不同频率影响情况:
一种 InSAR 干涉相位图的自适应滤波算法
收稿日期:2010?06?12 基金项目:国家自然科学基金资助项目(60802074,41001282);教育部新世纪优秀人才支持计划资助项目;中央高校基本科研业务费专项 资金资助项目(JY10000902011) 作者简介:郭 交(1984-),男,西安电子科技大学博士研究生,E?mail:jiao.g@https://www.360docs.net/doc/b710132485.html,.doi押10.3969/j.issn.1001?2400.2011.04.014 一种InSAR 干涉相位图的自适应滤波算法 郭 交,李真芳,刘艳阳,保 铮 (西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071) 摘要:提出了一种自适应的InSAR 干涉相位图滤波方法.干涉相位滤波算法的关键是独立同分布滤波 样本的选取,该方法以相位变化最小为准则,根据区域增长策略,在当前滤波像素的邻域空间内自适应 地选择滤波窗口,再在此窗口内进行复数平均得到滤波后的干涉相位值.以相位变化最小为准则进行滤 波样本的选取,使其满足独立同分布的条件,从而提高干涉相位滤波的性能.仿真数据和实测数据的处 理结果表明,该算法具有较好的滤波性能,能够充分保持干涉相位图像细节,并有效地去除噪声. 关键词:干涉合成孔径雷达;干涉相位图;相位滤波;自适应区域增长 中图分类号:TN957 文献标识码:A 文章编号:1001?2400(2011)04?0077?05 New adaptive noise suppressing method for interferometric phase images GUO Jiao熏LI Zhenfang熏LIU Yanyang熏BAO Zheng 穴National Key Lab.of Radar Signal Processing熏Xidian Univ.熏Xi’an 710071熏China雪 Abstract押 This paper proposes a new adaptive noise suppressing method for interferometric phase images.The key point of noise filtering for interferometric phase images is the selection of the independent and identically distributed 穴i.i.d.雪samples.The proposed method determines filtering samples with the criterion of the minimum phase differences according to the region?growing strategy熏and then computes the filtered phase in the complex domain.Due to the minimum phase difference熏the proposed method selects the filtering samples that obey the i.i.d.assumption more accurately熏thus improving the filtering performance.Finally熏experiments carried out on simulated and real data confirm that the proposed method possesses a better filtering performance and has the ability to suppres the noise effectively while maintaining the interferogram details adequately. Key Words押 synthetic aperture radar interferometry 穴InSAR雪鸦interferogram鸦phase filtering鸦adaptive region growing 干涉合成孔径雷达(InSAR)是获取地面数字高程图(DEM)的重要遥感技术.它通过对同一地区获得的两幅相干SAR 复图像进行干涉处理,得到观测区域的三维地形图[1].干涉相位图滤波是InSAR 数据处理中的关键步骤之一,相位滤波性能直接影响后续的二维相位展开处理,最终影响DEM 的高程精度[2].因此,研究稳健的相位图滤波算法具有重要的应用价值. 干涉相位图的滤波算法总是假定滤波窗口内的样本点满足独立同分布的假设,这样得到的均值滤波结果在统计意义上才等于滤波相位的均值[3?4].然而,在InSAR 数据的实际处理中,由于受地形起伏的影响和滤波样本的限制(最优的滤波结果应该是集合平均,而不是通常处理中所采用的空间平均),位于滤波窗口内的数据样本不可能严格满足独立同分布,尤其在地形变化剧烈的地区,这必然会导致滤波结果偏离理想真值. 最原始的圆周均值滤波方法根据经验值选取固定的滤波窗口(例如形状为规则正方形,大小为7×7),2011年8月第38卷 第4期 西安电子科技大学学报(自然科学版)JOURNAL OF XIDIAN UNIVERSITY Aug.2011Vol.38 No.4
光谱干涉图的傅立叶变换相位分析理论
3.1 干涉条纹图的傅立叶变换相位分析理论 在各种光学测量中,,条纹图形的数学表达式可以写成下面的形式: ()()()()[]y x x f y x b y x a y x g ,2cos ,,,0φπ++= (3.1) 上式中()y x ,φ是我们想要得到的相位信号,而()y x a ,和()y x b ,的振幅量是不需要的;在大多数情况下,()y x a ,、()y x b ,和()y x ,φ相对于空间载频0f 是慢变量。例如,当00=f 时, ()()()()[]y x y x b y x a y x g ,cos ,,,0φ+= (3.2) 上式中()y x g ,0表示一幅干涉图。 为了把(3.1)式表示的图形由图像传输仪器传送到计算机便于处理,重写(3.1)式,于是可以写成下面的形式: ()()()()()()x if y x c x if y x c y x a y x g 0*02exp ,2exp ,,,ππ?++= (3.3) 上式中,()y x c ,*是[]y x c ,的复共轭函数,()y x c ,表示如下: ()()()[]y x i y x b y x c ,exp ,2 1,φ= (3.4) 对(3.3)式进行快速傅立叶变换算法(Fast Fourier Transform: FFT ),得到以下结果: ()()y f f C y f f C y f A y f G ,),(),(,0*0?+?+= (3.5) 上式中()y f G ,、()y f A ,、()y f f C ,0?和()y f f C ,0*?表示(3.3)中对应的各个函数的傅立叶谱,f 表示在x 方向上的空间频率。方程(3.5)中各式对应于的表示在图3.2(A )上,()y f A ,、()y f f C ,0?和()y f f C ,0*?在空间频域由0f 分隔开。
相位干涉仪测向算法及其在TMS320C6711上的实现
摘要:对实施被动无源测向定位的主要工具之一的相位干涉仪进行了较为详细和系统的研究,给出了一维相位干涉仪的基本关系式,分析了五通道相位干涉仪测向定位算法及其性能指标?熏对解相位模糊问题进行了探讨。最后,在高速浮点数字信号处理器TMS320C6711系统上实现了五通道相位干涉仪测向定位算法,达到了性能指标及实时实现。关键词:相位干涉仪测向定位相位模糊定位误差实时处理相位干涉仪测向技术广泛应用于天文、雷达、声纳等领域。将干涉仪原理用于无线电测向始于上世纪五十年代和六十年代,随着数字信号处理器的出现,通过数字信号处理器来实现高精度实时测向成为可能。本文在对一维和二维相位干涉仪进行研究的基础上给出了五通道相位干涉仪的基本关系式,分析了测向精度,并对解相位模糊问题和信道校正问题进行了探讨。采用多基线五元圆形天线阵列为模型,由天线阵列接收到的信号求解出五元天线阵列的互相关信号,并由此提取测向所需的方位信息。本文以五通道相位干涉仪硬件实现为目标,采用高速浮点数字信号处理芯片TMS320C6711进行测向处理。1相位干涉仪测向原理1.1一维相位干涉仪测向原理图1所示为一个最简单的一维双阵元干涉仪模型。图中,间隔为d(d称为基线)的两根天线A1和A2所接收的远场辐射 φ=(4πd/λ)cosθ(1)式(1)中,λ为接收电磁波的波长。因此,只要测量出φ,就能算出辐射源的到达方向θ:θ=arccos(φλ/4πd)(2)1.2测向误差的分析在实际系统中,两根天线A1和A2接收的信号为:xi(t)=s(t)exp[(-1)jj2πd/λcosθ]+ni(t),i=1,2(3)其中,ni代表对应阵元i接收的噪声,两阵元的噪声统计相互独立,且与信号统计独立。两个阵元接收信号的互相关为:r=E{x1(t)x2*(t)}=Psexp(j4πd/λcosθ)(4)式中,E代表数学期望运算,“*”代表复共轭运算,Ps代表信号功率,相关以后噪声得到抑制。由(4)式有:θ=arccos[(λ/4πd)arg(r21)+kλ/2d(5)式中,arccos表示反余弦函数,arg代表复数取幅角运算,区间为[-π,π]。k为整数,且满足:-2d/λ-arg(r21)/2π≤k≤2d/λ-arg(r21)/2π(6)在(6)式中,当d/λ>0.5时,k的取值不唯一,θ有多个解,由此产生测向模糊。对(5)式求导,有:|Δθ|=λ/4πd|sinθ|Δarg(r21)(7)由(7)式可以得出以下结论:sinθ越大,即方位角与干涉仪法线方向的夹角越小,测向精度越高;反之,测向精度降低,直至测向无效。当θ=±90°(即信号从干涉仪法线方向入射)时,精度最高;θ=0°或180°(即信号从干涉仪基线方向入射)时,接收信号互相关的幅角arg(r21)反映不出方位角的变化,测向无效。但单基线干涉仪不能同时测量俯仰角和方位角,此时至少需要另一条独立基线的干涉仪对测得的数据联合求解。1.3二维干涉仪测向原理及去模糊处理1.3.1多基线五元圆形天线模型五通道相位干涉仪采用宽口径、多基线的五元圆形天线阵,五边形的五个阵元均匀分布在半径为R的圆上,五个阵源分别为1、2、3、4、5,如图2所示。天线阵平面与地面平行,测得的方位角θ为以天线到地面的垂足为原点,目标在地面上的方位角。测得的俯仰角φ对应于目标到原点的距离(俯仰角0°对应原点)。两个阵元接收信号之间的互相关为:ri,j+1=E{xi(t)x*i+1(t)}=GiGi+1Psexp{j2π(R/λ)sinφ?[cos(θ+54°-72°i)-cos(θ-18°-72°i)]}i=1~5,定义r56=r51方位角θ和俯仰角φ的具体计算如下:Qri,i+1的幅角为αi,i+1=arg(ri,i+1)+2k2π=4π(R/λ)cos54°sinφcos(θ+108°-72°i)ri+3,i+4的幅角为αi+3,i+4=arg(ri+3,i+4)+2k1π=4π(R/λ)cos54°sinφcos(θ-108°-72°i)∴θ=atan2[αi+3,i+4-αi,i+1)csc108°,(αi+3,i+4+αi,i+1)sec108°]+72°i(8)式中,i=1~5,令r56=r51、r67=r12、r78=r23、r89=r34;atan2(y,x)代表四象限求反正切函数;arcsin代表反正弦函数。k1、k2为整数,且满足: