机械制图 第一角法与第三角法区别
6.8 第三角画法简介
当前位置:机械制图》第6章机械图样的表示法》6.8 第三角画法简介
返回目录
★6.8 第三角画法简介
★6.8.1 第三角投影法的概念
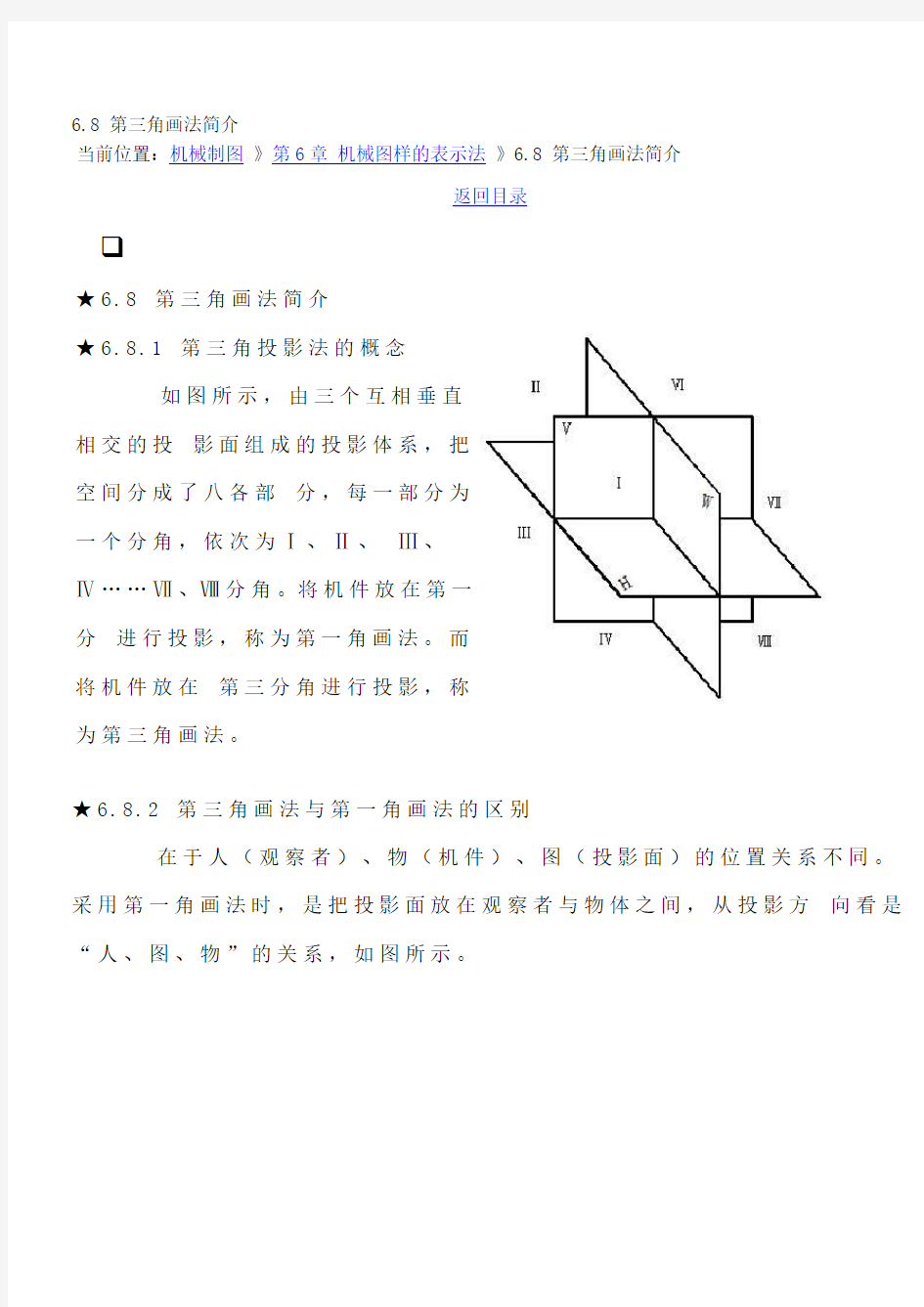
如图所示,由三个互相垂直相交
的投影面组成的投影体系,把空间
分成了八各部分,每一部分为一个
分角,依次为Ⅰ、Ⅱ、Ⅲ、Ⅳ……Ⅶ、
Ⅷ分角。将机件放在第一分进行投
影,称为第一角画法。而将机件放在
第三分角进行投影,称为第三角画
法。
★6.8.2 第三角画法与第一角画法的区别
在于人(观察者)、物(机件)、图(投影面)的位置关系不同。
采用第一角画法时,是把投影面放在观察者与物体之间,从投影方向看是“人、图、物”的关系,如图所示。
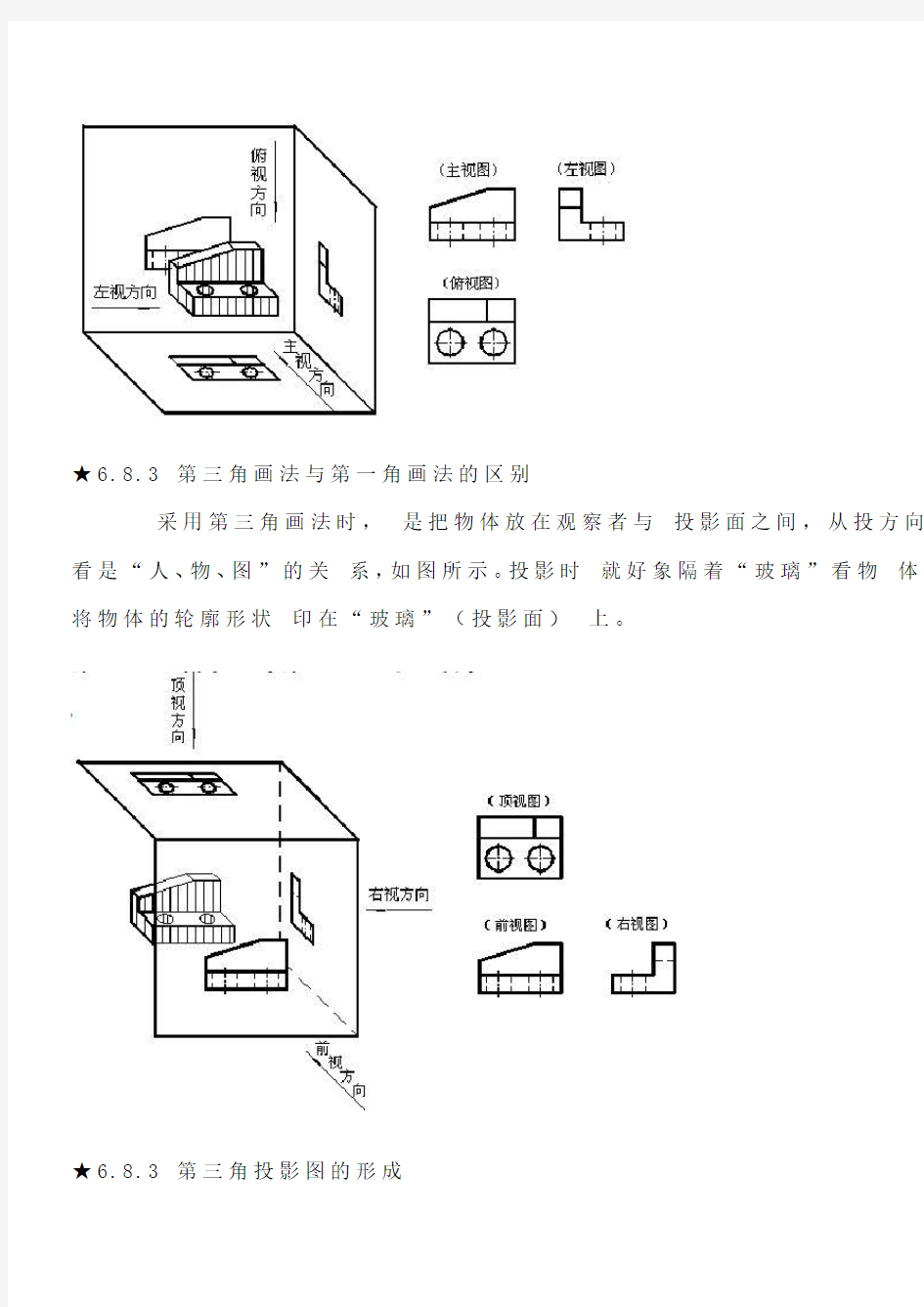
★6.8.3 第三角画法与第一角画法的区别
采用第三角画法时,是把物体放在观察者与投影面之间,从投方向看是“人、物、图”的关系,如图所示。投影时就好象隔着“玻璃”看物体,将物体的轮廓形状印在“玻璃”(投影面)上。
★6.8.3 第三角投影图的形成
采用第三角画法时,从前面观察物体在V面上得到的视图称为前视图从上面观察物体在H面上得到的视图称为顶视图;从右面观察物体在W 面上得到的视图称为右视图。各投影面的展开方法是:V面不动,H面向上旋转90°,W面向右旋转90°,使三投影面处于同一平面内。
采用第三角画法时也可以将物体放在正六面体中,分别从物体的六个方向向各投影面进行投影,得到六个基本视图,即在三视图的基础上增加了后视图(从后往前看)、左视图(从左往右看)、底视图(从下往上看)。
第三角画法投影面展开
第三角画法视图的配置
★6.8.4 第一角和第三角画法的识别符号
在国际标准中规定,可以采用第一角画法,也可以采用第三角画法。为了区别这两种画法,规定在标题栏中专设的格内用规定的识别符号表示。
机械制图的角法区分
三视图的第三角法和第一角法划分: 一、第一角投影法 1.凡将物体置於第一象限内,以「视点(观察者)」→「物体」→「投影面」关系而投影视图的画法,即称为第一角法。亦称第一象限法。, 2.第一角投影箱之展开方向,以观察者而言,为由近而远之方向翻转展开。 3.第一角法展开后之视图排列如下,以常用之三视图(前视、俯视、右侧视图)而言,其右侧视图位於前视图之左侧,俯视固则位於前视图之正下方。 二.、第三角投影法 1.凡将物体置於第三象限内,以「视点(观察者)」→「投影面」→「物体」关系而投影视图的画法,即称为第三角法。亦称第三象限法。 2.第三角投影箱之展开方向,以观察者而言,为由远而近之方向翻转展开。3.第三角法展开后之六个视固排列如下,以常用之三视图而言,其右侧视图位於前视图之右侧,而俯视图则位於前视图之正上方。 CNS 相关规定 CNS中国国家标准之象限投影符号,系将一截头圆锥之前视图与左侧视图,依投影之排列而得。主要之区别为第一角法符号(左侧视图排在右边),而第三角法符号(左侧视图位在左边)。 对於正投影方法之使用,CNS规定第一角法或第三角法同等适用。但在同一张图纸上不可混合使用,且须在标题概内或其他明显处绘制符号或加注「第一角法」或「第三角法」字样。以作为读图之识别。 由於第二象限投影与第四象限投影因水平投影面旋转后与直立投影面重叠,致使投影视图线条混淆不清,增加绘固及识图不便,故不予采用。 欧洲各国盛行第一角法投影制,所以第一角法投影亦有「欧式投影制」之称呼。例如德国(DIN)、瑞士(VSM)、法国(NF).挪威(NS)等国家使用之。 美国采用第三角投影制,故有「美式投影制」之称呼。除美国(ANSI)外,尚盛行於美洲地区。而中华民国(CNS)、国际标准化机构(ISO)与日本[JIS]则采第一角法及第三角两制并行。 视图之排列,应依投影原理上下左右对齐排列,不得任意更换或未依据投影方式排置。 六种视图中最常用之三视图组合为:前视图、上视圆及右侧视图,一般均以L字形或逆向L字形之方式排列於图纸上。 我们国内用的是第一角画法,国外用第三角画法的比较多 第一角画法和第三角画法的区别是视图放的位置 第一角画法:左视图放右边,右视图放左边,上视图放下面,依此类推 第三角画法:左视图放左边,右视图放右边,上视图放上面,依此类推
机械制图学习方法
我们怎样学习机械制图 发掘你的潜在能力,开发你的大脑,增强你的空间思维能力及形象思维能力和抽象思维能力。 一、了解机械制图的地位和任务 机械制图是机械类设计人员必须掌握的专业知识中一门实践性较强的技术基础知识,图示方法的掌握、制图标准的应用、绘图技能的提高、制图和读图能力的培养以及空间想象能力的增强,都是通过制图习题和作业要求来实现的。多做练习是学好机械制图的关键,因此要积极独立多做各种练习。不断提高机械制图的投影能力、表达能力、绘图能力、读图能力和计算机绘制能力。 二、学好机械制图的要求和目的 1.加深巩固基本内容; 2.通过练习和实践完成绘图基本技能的训练。 3.用正确的方法完成练习,巩固和提高所学的知识,在日常学习中抽查自己掌握知识的情况; 4.通过大量正确的练习实践来提高绘图技能,养成良好的习惯,有意识地进行基础素质训练。 三、重点内容及其基本要求 第一、制图的基本知识和技能 1.基本要求:通过实训掌握国家标准关于机械制图的基本规定(图幅、比例、字体、图线、尺寸标注)、能正确使用绘图工具和仪器、掌握常用的几何作图方法与平面图形画法,会分析和标注平面图形的尺寸。做到作图准确、图线分明、字体工整、符合国标。 2.内容: 1)图线练习:在a3图纸上抄画线型图。 2)尺寸标注、字体练习、几何作图练习。 3)几何作图大作业:a3图纸上画平面图形 第二、投影的基本知识: 1.基本要求:通过实训了解投影的基本知识和分类,掌握几何元素投影的基本特征和三视图的投影规律以及三视图的画法。培养绘图读图能力,具备初步的空间概念。 2.内容: 1)由轴测图绘三视图线练习。 2)根据已知条件完成物体的三视图练习。 3)根据三视图做模型。(课外完成) 4)根据物体的二视图补画第三视图。 第三、点、直线、平面的投影 1.基本要求:通过实训掌握点的投影规律、直线的投影的概念及各种位置直线的投影特性 会用直角三角形法求线段实长,理解二直线平行、相交、交叉、垂直的一般作图问题、掌握一般位置平面的投影特性、掌握特殊位置平面的投影特性、平面上点和线的一般作图问题。进一步培养空间概念。 2.内容: 1)点的投影练习。 2)直线的投影练习。
三角法测距
三角法红外测距原理介绍 工作原理: Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一 个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器 到物体的距离D就可以通过几何关系计算岀来了。 OCD检测器 滤镜 X 红外线发射器 图1:三角测量原理 可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但
是传感器反而看不到了。当物体距离D很大时,L值就会很小。这时CCD检测器能否分辨得岀这个很小 的L值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。要检测越是远的物体,CCD
的分辨率要求就越高。 非线性输岀: Sharp GS2XX 系列的传感器的输出是非线性的。没个型号的输出曲线都不同。所以,在实际使用前,最 好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实 有效的测量数据。下图是典型的 Sharp GP2D12的输出曲线图。 从上图中,可以看到,当被探测物体的距离小于 10cm 的时候, 输岀电压急剧下降,也就是说从电压读数来看,物体的距离应该是 越来越远了。但是实际上并不是这样的, 想象一下,你的机器人本 来正在慢慢的靠近障碍物,突然发现障碍物消失了, 一般来说,你 的控制程序会让你的机器人以全速移动,结果就是, "砰"的一声。 当然了,解决这个方法也不是没有, 这里有个小技巧。只需要改变 一下传感器的安装位置,使它到机器人的外围的距离大于最小探测 距离就可以了。如图3所示: 图2: Sharp GP2D12输出曲线 0.6 Q.2 価M 5ft 轴SO 帕M 90 DI MIMC 屯 to obiect leml 3.2.2.2.1 .uk V 1 Hr £ fly >m 冷"3 雷-<
三角法与向量法解平面几何题(正)
第27讲 三角法与向量法解平面几何题 相关知识 在ABC ?中,R 为外接圆半径,r 为内切圆半径,2 a b c p ++=,则 1,正弦定理: 2sin sin sin a b c R A B C ===, 2,余弦定理:2 2 2 2cos a b c bc A =+-,2 2 2 2cos b a c ac B =+-,2 2 2 2cos c a b ab C =+-. 3,射影定理:cos cos a b C c B =+,cos cos b a C c A =+,cos cos c a B b A =+. 4,面积:211sin 2sin sin sin 224a abc S ah ab C rp R A B C R = ==== = (sin sin sin )rR A B C ++ 2 221(cot cot cot )4 a A b B c C = ++. A 类例题 例1.在ΔABC 中,已知b =asinC ,c =asin (900 -B ),试判断ΔABC 的形状。 分析 条件中有边、角关系, 应利用正、余弦定理, 把条件统一转化为边或者是角的关系, 从而判定三角形的形状。 解 由条件c = asin (900 - B ) = acosB = c b c a ac b c a a 222 22222-+=-+ 2 2222c b c a =-+? 是直角A b c a ?+=?2 22 1sin sin sin =?=A A C c A a 是直角?? ?C a c C c a sin sin =?=?. Q C a b sin =?=? c b ΔABC 是等腰直角三角形。 例2.(1)在△ABC 中,已知cosA =13 5,sinB =53 ,则cosC 的值为( ) A .6516 B .6556 C .65566516或 D . 65 16- 解 ∵C = π - (A + B ),∴cosC = - cos (A + B ),又∵A ∈(0, π),∴sinA = 13 12,而sinB =53 显然sinA > sinB ,∴A > B , ∵A 为锐角, ∴B 必为锐角, ∴ cosB = 5 4 ∴cosC = - cos (A + B ) = sinAsinB - cosAcosB =65 1654135531312=?-?.选A . 说明 △ABC 中,sinA > sinB ?A > B . 根据这一充要条件可判定B 必为锐角。 (2)在Rt △ABC 中,C =90°,A =θ,外接圆半径为R ,内切圆半径为r ,
机械制图习题答案
《机械制图》 (第六版) 习题集答案 第3页图线、比例、制图工具的用法、尺寸注法、斜度和锥度 ●要掌握和理解比例、斜度、锥度的定义;各种图线的画法要规范。 第4页椭圆画法、曲线板用法、平面图形的尺寸注法、圆弧连接 1、已知正六边形和正五边形的外接圆,试用几何作图方法作出正六边形,用试分法作出正五边形,它们的底边都是水平线。 ●注意多边形的底边都是水平线;要规范画对称轴线。 ●正五边形的画法: ①求作水平半径ON的中点M; ②以M为圆心,MA为半径作弧,交水平中心线于H。 ③AH为五边形的边长,等分圆周得顶点B、C、D、E ④连接五个顶点即为所求正五边形。 2、用四心圆法画椭圆(已知椭圆长、短轴分别为70mm、45mm)。 ●参教P23四心圆法画椭圆的方法做题。注意椭圆的对称轴线要规范画。 3~4、在平面图形上按1:1度量后,标注尺寸(取整数)。 5、参照左下方所示图形的尺寸,按1:1在指定位置处画全图形。 第6页点的投影 1、按立体图作诸点的两面投影。 ●根据点的两面投影的投影规律做题。 2、已知点A在V面之前36,点B在H面之上,点D在H面上,点E在投影轴上,补全诸的两面投影。 ●根据点的两面投影的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。 3、按立体图作诸点的两面投影。 ●根据点的三面投影的投影规律做题。 4、作出诸点的三面投影:点A(25,15,20);点B距离投影面W、V、H分别为20、10、15;点C在A之左,A之前15,A之上12;点D在A之下8,与投影面V、H等距离,与投影面W的距离是与H面距离的倍。
●根据点的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。各点坐标为: A(25,15,20) B(20,10,15) C(35,30,32) D(42,12,12) 5、按照立体图作诸点的三面投影,并表明可见性。 ●根据点的三面投影的投影规律做题,利用坐标差进行可见性的判断。(由不为0的坐标差决定,坐标值大者为可见;小者为不可见。) 6、已知点A距离W面20;点B距离点A为25;点C与点A是对正面投影的重影点,y 坐标为30;点D在A的正下方20。补全诸点的三面投影,并表明可见性。 ●根据点的三面投影的投影规律、空间点的 直角坐标与其三个投影的关系、两点的相对 位置及重影点判断做题。 各点坐标为: A(20,15,15) B(45,15,30) C(20,30,30) D(20,15,10) 第7页直线的投影(一) 1、判断下列直线对投影面的相对位置,并 填写名称。 ●该题主要应用各种位置直线的投影特性进行判断。(具体参见教P73~77) AB是一般位置直线; EF是侧垂线; CD是侧平线; KL是铅垂线。 2、作下列直线的三面投影: (1)水平线AB,从点A向左、向前,β=30°,长18。 (2)正垂线CD,从点C向后,长15。 ●该题主要应用各种位置直线的投影特性进行做题。(具体参见教P73~77) 3、判断并填写两直线的相对位置。 ●该题主要利用两直线的相对位置的投影特性进行判断。(具体参见教P77) AB、CD是相交线; PQ、MN是相交线; AB、EF是平行线; PQ、ST是平行线; CD、EF是交叉线; MN、ST是交叉线;
第一角与第角投影法
第一角投影法,,与第三角投影法 一、第一角投影法 1.凡将物体置於第一象限内,以「视点(观察者)」→「物体」→「投影面」关系 而投影视图的画法,即称为第一角法。亦称第一象限法。, 2.第一角投影箱之展开方向,以观察者而言,为由近而远之方向翻转展开。 3.第一角法展开后之视图排列如下,以常用之三视图(前视、俯视、右侧视图)而 言,其右侧视图位於前视图之左侧,俯视固则位於前视图之正下方。 二、第三角投影法 1.凡将物体置於第三象限内,以「视点(观察者)」→「投影面」→「物体」关系 而投影视图的画法,即称为第三角法。亦称第三象限法。 2.第三角投影箱之展开方向,以观察者而言,为由远而近之方向翻转展开。 3.第三角法展开后之六个视固排列如下,以常用之三视图而言,其右侧视图位於前视图之右侧,而俯视图则位於前视图之正上方。 在工程图的配置文件修改,如图示: 附件 2005-5-15 20:52
06.jpg(22.62 KB) 自改革开放以来,我引进了不少国外设备、图纸和其它技术资料,有不少发达国家的机械图样投影方法与我国所采用的投影方法不同。为了更好地学习发达国家的先进技术,故快速看懂国外机械图纸很有必要。 1 概述 当今世界上,ISO国际标准规定,第一角和第三角投影同等有效。各国根据国情均有所侧重,其中俄罗斯、乌克兰、德国、罗马尼亚、捷克、斯洛伐克以及东欧等国均主要用第一角投影,而美国、日本、法国、英国、加拿大、瑞士、澳大利业、荷兰和墨西哥等国均主要用第三角投影。解放前我国也采用第三角投影,新中国成立后改用第一角投影。在引进的国外机械图样和科技书刊中经常会遇到第三角投影。ISO 国际标准规定了第一角和第三角的投影标记(图1和图2)。在标题栏中,画有标记符号,根据些符号可识别图样画法,但有的图纸无投影标记。
机械制图习题集答案.doc
《机械制图》(第六版) 习题集答案
第 3 页图线、比例、制图工具的用法、尺寸注法、斜度和锥度●要掌握和理解比例、斜度、锥度的定义;各种图线的画法要规范。
第 4 页椭圆画法、曲线板用法、平面图形的尺寸注法、圆弧连接 1、已知正六边形和正五边形的外接圆,试用几何作图方法作出正六边形,用试分法作出正五边形,它们的底边都是水平线。 ●注意多边形的底边都是水平线;要规范画对称轴线。 ●正五边形的画法: ①求作水平半径ON的中点 M; ②以 M为圆心, MA为半径作弧,交水平中心线于H。 ③AH为五边形的边长,等分圆周得顶点B、C、D、E ④连接五个顶点即为所求正五边形。 2、用四心圆法画椭圆(已知椭圆长、短轴分别为70mm、 45mm)。 ●参教 P23 四心圆法画椭圆的方法做题。注意椭圆的对称轴线要规范画。
3~4、在平面图形上按1:1 度量后,标注尺寸(取整数)。 5、参照左下方所示图形的尺寸,按1: 1 在指定位置处画全图形。 第6页点的投影 1、按立体图作诸点的两面投影。 ●根据点的两面投影的投影规律做题。 2、已知点 A 在 V 面之前 36,点 B 在 H 面之上,点 D 在 H 面上,点 E 在投影轴上,补全诸的两面投影。 ●根据点的两面投影的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对 位置做题。 3、按立体图作诸点的两面投影。 ●根据点的三面投影的投影规律做题。 4、作出诸点的三面投影:点 A( 25,15,20);点 B 距离投影面 W、V、H分别为 20、10、15;点 C 在 A 之左, A 之前 15,A 之上 12;点 D在 A 之下 8,与投影面 V、H 等距离,与投影面 W的距离是与 H 面距离的倍。
第三角法和第一角法
第三角法和第一角法 第三角法和第一角法划分: 一、第一角投影法 1.凡将物体置于第一象限内,以「视点(观察者)」→「物体」→「投影面」关系而投影视图的画法,即称为第一角法。亦称第一象限法。 2.第一角投影箱之展开方向,以观察者而言,为由近而远之方向翻转展开。 3.第一角法展开后之视图排列如下,以常用之三视图(前视、俯视、右侧视图)而言,其右侧视图位于前视图之左侧,俯视固则位于前视图之正下方。 二.、第三角投影法 1.凡将物体置于第三象限内,以「视点(观察者)」→「投影面」→「物体」关系而投影视图的画法,即称为第三角法。亦称第三象限法。 2.第三角投影箱之展开方向,以观察者而言,为由远而近之方向翻转展开。 3.第三角法展开后之视固排列如下,以常用之三视图而言,其右侧视图位于前视图之右侧,而俯视图则位于前视图之正上方。
CNS 相关规定 CNS中国国家标准之象限投影符号,系将一截头圆锥之前视图与左侧视图,依投影之排列而得。主要之区别为第一角法符号(左侧视图排在右边),而第三角法符号(左侧视图位在左边)。 对于正投影方法之使用,CNS规定第一角法或第三角法同等适用。但在同一张图纸上不可混合使用,且须在标题概内或其它明显处绘制符号或加注「第一角法」或「第三角法」字样。以作为读图之识别。 由于第二象限投影与第四象限投影因水平投影面旋转后与直立投影面重叠,致使投影视图线条混淆不清,增加绘固及识图不便,故不予采用。 欧洲各国盛行第一角法投影制,所以第一角法投影亦有「欧式投影制」之称呼。例如德国(DIN)、瑞士(VSM)、法国(NF).挪威(NS)等国家使用之。 美国采用第三角投影制,故有「美式投影制」之称呼。除美国(ANSI)外,尚盛行于美洲地区。而中华民国(CNS)、国际标准化机构(ISO)与日本[JIS]则采第一角法及第三角两制并行。 视图之排列,应依投影原理上下左右对齐排列,不得任意更换或未依据投影方式排置。六种视图中最常用之三视图组合为:前视图、上视圆及右侧视图,一般均以L字形或逆向L字形之方式排列于图纸上。 我们国内用的是第一角画法,国外用第三角画法的比较多 第一角画法和第三角画法的区别是视图放的位置 第一角画法:左视图放右边,右视图放左边,上视图放下面,依此类推 第三角画法:左视图放左边,右视图放右边,上视图放上面,依此类推 来自https://www.360docs.net/doc/c613935172.html,/hiautocad/blog/item/9464e903671ca088d43f7c97.html 第一角法与第三角法的区别 该贴对于那些对于对第一角法与第三角法不很清楚的同行有帮助! 1. 任何物体在空间位置都有八个位置,即所谓视角。因此就产生了不同的投影视图。第一角画法又叫“苏联”画法,也就是先见视图——再见实物。第三角画法又叫“ 美国”画法,其特点就是先见实物——再见视图。就其投影规律来讲第三角画法较为合理,因为它的视图名字就是它的视图位置,正象有的朋友讲的那样画轴侧图好象容易些。其实只要你熟练掌握了投影规律,两种画法都是一样的。目前以美国为代表的画法有日本,德国,加拿大等先进的资本主义国家,但英国除外。以前以苏联为首的东欧前社会主义国家都采用第一角视图画法,我们国家的整个工业体系,在五六十年代是全盘照搬前苏联那一套,当然采用的是第一角画法了。目前台湾翔虹CAD的画法属于美国画法,所以说了如上的话。 2. 简单地说,第一视角就是:图纸-实物-你的眼睛,即实物放在图纸和你的眼睛中间,从眼睛方向投影到图纸上;第三视角就是:实物-图纸-你的眼睛,即图纸放在实物和你的眼睛中间,实物往你的眼睛方向投影到图纸上.还有不能像以上所说的:简单说就是左视图在左边,右视图在右边! 3. 一角法又称投影法,而三角发又称镜象法
三角法测距
三角法红外测距原理介绍 Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。 图1:三角测量原理 可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小。这时CCD检测器能否分辨得出这个很小的L值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。要检测越是远的物体,CCD
的分辨率要求就越高。 Sharp GS2XX系列的传感器的输出是非线性的。没个型号的输出曲线都不同。所以,在实际使用前,最好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。下图是典型的Sharp GP2D12的输出曲线图。 从上图中,可以看到,当被探测物体的距离小于10cm的时候, 输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是 越来越远了。但是实际上并不是这样的,想象一下,你的机器人本 来正在慢慢的靠近障碍物,突然发现障碍物消失了,一般来说,你 的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。 当然了,解决这个方法也不是没有,这里有个小技巧。只需要改变 一下传感器的安装位置,使它到机器人的外围的距离大于最小探测 距离就可以了。如图3所示: 图2:Sharp GP2D12输出曲线
第一角和第三角视图
第五章第五章正投影 § 5一2 第一角投影與第三角投影與 一、第一角投影法 1.凡將物體置於第一象限內,以「視點(觀察者)」→「物體」→「投 影面」關係而投影視圖的畫法,即稱為第一角法。如圖5一3所示。 亦稱第一象限法。, 2.第一角投影箱之展開方向,以觀察者而言,為由近而遠之方向翻轉展 開。如圖5一4所示。 3.第一角法展開後之視圖排列如下,以常用之三視圖(前視、俯視、右 側視圖)而言,其右側視圖位於前視圖之左側,俯視固則位於前視圖之正下方。如圖5-5所示。 圖5一3 第一角投影箱圖5一4 第一角投影箱之展開 圖5-5 第一角法視圖之排列位置 二.、第三角投影法 1.凡將物體置於第三象限內,以「視點(觀察者)」→「投影面」→ 「物體」關係而投影視圖的畫法,即稱為第三角法。如固5一6所示。亦稱第三象限法。
圖5一6 第三角投影箱圖5一7 第三角投影箱之展開 2.第三角投影箱之展開方向,以觀察者而言,為由遠而近之方向翻轉展 開。如圖5一7所示。3〃第三角法展開後之六個視固排列如下,以常用之三視圖 而言,其右側視圖位於前視圖之右側,而俯視圖則位於前視圖之正上方。 如圖5一8所示。 圖5-8 第三角法視圖之排列位置 CNS 相關規定 CNS中國國家標準之象限投影符號,係將一截頭圓錐之前視圖與左側視 圖,依投影之排列而得。如圖5一9所示。主要之區別為第一角法符號(左側視圖排在右邊),而第三角法符號(左側視圖位在左邊)。 (a)截頭圓錐 (b)第一角法投影符號 (c)第三角法投影符號
圖5一9 投影符號之規定 對於正投影方法之使用,CNS規定第一角法或第三角法同等適用。但在 如前節所述:由於第二象限投影與第四象限投影因水平投影面旋轉後與直 立投影面重疊,致使投影視圖線條混淆不清,增加繪固及識圖不便,故不予採用。 歐洲各國盛行第一角法投影制,所以第一角法投影亦有「歐式投影制」之 稱呼。例如德國(DIN)、瑞士(VSM)、法國(NF).挪威(NS)等國家使用之。 美國採用第三角投影制,故有「美式投影制」之稱呼。除美國(ANSI)外, 尚盛行於美洲地區。而中華民國(CNS)、國際標準化機構(ISO)與日本[JIS] 則採第一角法及第三角兩制並行。 視圖之排列,應依投影原理上下左右對齊排列,不得任意更換或未依據 投影方式排置。 六種視圖中最常用之三視圖組合為:前視圖、上視圓及右側視圖,一般均 以L字形或逆向L字形之方式排列於圖紙上。
机械制图习题答案解析
第3页●要掌握和理解比例、斜度、锥度的定义;各种图线的画法要规范。 第4页椭圆画法、曲线板用法、平面图形的尺寸注法、圆弧连接3~4、在平面图形上按1:1度量后,标注尺寸(取整数)。
第6页点的投影 3、按立体图作诸点的两面投影。 ●根据点的三面投影的投影规律做题。 4、作出诸点的三面投影:点A(25,15,20);点B距离投影面W、V、H分别为20、10、15;点C在A之左,A之前15,A之上12;点D在A之下8,与投影面V、H等距离,与投影面W的距离是与H面距离的3.5倍。 ●根据点的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。各点坐标为: A(25,15,20) B(20,10,15) C(35,30,32) D(42,12,12) 6、已知点A距离W面20;点B距离点A为25;点C与点A是对正面投影的重影点,y 坐标为30;点D在A的正下方20。补全诸点的三面投影,并表明可见性。
●根据点的三面投影的投影规律、空间点的 直角坐标与其三个投影的关系、两点的相对 位置及重影点判断做题。 各点坐标为: A(20,15,15) B(45,15,30) C(20,30,30) D(20,15,10) 第7页直线的投影(一) 2、作下列直线的三面投影: (1)水平线AB,从点A向左、向前,β=30°,长18。 (2)正垂线CD,从点C向后,长15。 ●该题主要应用各种位置直线的投影特性进行做题。(具体参见教P73~77) 3、判断并填写两直线的相对位置。 ●该题主要利用两直线的相对位置的投影特性进行判断。(具体参见教P77) AB、CD是相交线; PQ、MN是相交线; AB、EF是平行线; PQ、ST是平行线; CD、EF是交叉线; MN、ST是交叉线; 5、分别在图(a)、(b)、(c)中,由点A作直线AB与CD相交,交点B距离H面20。 ●图(c)利用平行投影的定比性作图。
机械制图投影法
机械制图:三视图的第一角法和第三角法划分 三视图的第一角法和第三角法划分: 一、第一角投影法 1.凡将物体置於第一象限内,以「视点(观察者)」→「物体」→「投影面」关系而投影视图的画法,即称为第一角法。亦称第一象限法。, 2.第一角投影箱之展开方向,以观察者而言,为由近而远之方向翻转展开。 3.第一角法展开后之视图排列如下,以常用之三视图(前视、俯视、右侧视图)而言,其右侧视图位於前视图之左侧,俯视固则位於前视图之正下方。 二.、第三角投影法 1.凡将物体置於第三象限内,以「视点(观察者)」→「投影面」→「物体」关系而投影视图的画法,即称为第三角法。亦称第三象限法。 2.第三角投影箱之展开方向,以观察者而言,为由远而近之方向翻转展开。3.第三角法展开后之六个视固排列如下,以常用之三视图而言,其右侧视图位於前视图之右侧,而俯视图则位於前视图之正上方。 CNS 相关规定 CNS中国国家标准之象限投影符号,系将一截头圆锥之前视图与左侧视图,依投影之排列而得。主要之区别为第一角法符号(左侧视图排在右边),而第三角法符号(左侧视图位在左边)。 对於正投影方法之使用,CNS规定第一角法或第三角法同等适用。但在同一张图纸上不可混合使用,且须在标题概内或其他明显处绘制符号或加注「第一角法」或「第三角法」字样。以作为读图之识别。 由於第二象限投影与第四象限投影因水平投影面旋转后与直立投影面重叠,致使投影视图线条混淆不清,增加绘固及识图不便,故不予采用。 欧洲各国盛行第一角法投影制,所以第一角法投影亦有「欧式投影制」之称呼。例如德国(DIN)、瑞士(VSM)、法国(NF).挪威(NS)等国家使用之。 美国采用第三角投影制,故有「美式投影制」之称呼。除美国(ANSI)外,尚盛行於美洲地区。而中华民国(CNS)、国际标准化机构(ISO)与日本[JIS]则采第一角法及第三角两制并行。 视图之排列,应依投影原理上下左右对齐排列,不得任意更换或未依据投影方式排置。 六种视图中最常用之三视图组合为:前视图、上视圆及右侧视图,一般均以L字形或逆向L字形之方式排列於图纸上。 我们国内用的是第一角画法,国外用第三角画法的比较多 第一角画法和第三角画法的区别是视图放的位置 第一角画法:左视图放右边,右视图放左边,上视图放下面,依此类推 第三角画法:左视图放左边,右视图放右边,上视图放上面,依此类推
三角法红外测距原理介绍
三角法红外测距原理介绍 工作原理: Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。 图1:三角测量原理
可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小。这时CCD检测器能否分辨得出这个很小的L 值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。要检测越是远的物体,CCD的分辨率要求就越高。 非线性输出: Sharp GS2XX系列的传感器的输出是非线性的。没个型号的输出曲线都不同。所以,在实际使用前,最好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。下图是典型的Sharp GP2D12的输出曲线图。 图2:Sharp GP2D12输出曲线 从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。当然了,解决这个方法也不是没有,这里有个小技巧。只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。如图3所示:
说课稿机械制图正投影法及三视图
《机械制图——正投影法及三视图》说课 稿 今天我说课的题目是《正投影法及三视图》 首先我们来进行教材分析 一、说教材(2分钟) 1、教材地位及作用 (1)本节课选自 江西科学技术出版社出版的《机械制图》,江西职业学校指定教材的第二章第一节 (2)地位作用 机械制图课程是中职学校机械专业的一门专业基础课,具有很强的理论性和实践性,是工科类学生必不可少的实用技术。 本节课是学生学习机械制图的精髓和基础,工程中的图形90%都是利用正投影法三视图表示,学好本课是学习机械制图后续内容得基础,是培养学生空间想象能力,学生学习机械制图兴趣的关键。 我校选用教材是江西技工教材编委会主编,与之配套的《机械制图习题集》,江西省职业教育指定教材。 2、下面来说本节课的教学目标 (1)、知识目标(直接性目标):①理解投影法的概念,掌握正投影的特性;2、掌握三视图的形成过程及投影规律。③能初步利用所学知识解决实际问题;
(2)、能力目标(发展性目标):,培养学生空间抽象思维能力、识图绘图能力,掌握正投影法的基本理论和能运用正投影法绘制图样。。 (3)、情感目标(可持续性目标):养成认真、负责、严谨细致的制图作风,激发学生的学习兴趣,培养学生勇于提问,善于探索的思维方式。 3、教学重难点 教学重点:正投影法基本原理和三视图的形成过程及规律。 教学难点:三视图的形成过程及三视图的投影规律。 二、说学情(1分钟) 学生是学习的主体,机械制图是对中职一年级学生开设的基础课程,学生在15、6岁,思维活跃、求知欲强,对新鲜事物充满好奇,但中职学生基础较差,初中没有接触或立体几何,理解和接受新知识能力反应较慢,空间想象能力薄弱,但也有部分同学习兴趣浓厚,喜欢动手画图和动脑思考,具备一定的识图和绘图能力。 需要老师耐心教导、由简入难,并提供直观模型或图像与帮助。并且要求学生学习经过反复练习,能提高绘图能力。 三、说教法(5分钟) 为完成本课的教学目的和教学内容采用多种教学方法: 1.试验法 实物教学法:讲清重点突破难点加深对所学新知识的印象
三视图的第三角法和第一角法
三视图的第三角法和第一角法 2006年12月18日星期一 22:49 三视图的第三角法和第一角法划分: 一、第一角投影法 1.凡将物体置於第一象限内,以「视点(观察者)」→「物体」→「投影面」关系而投影视图的画法,即称为第一角法。亦称第一象限法。, 2.第一角投影箱之展开方向,以观察者而言,为由近而远之方向翻转展开。 3.第一角法展开后之视图排列如下,以常用之三视图(前视、俯视、右侧视图)而言,其右侧视图位於前视图之左侧,俯视固则位於前视图之正下方。 二.、第三角投影法 1.凡将物体置於第三象限内,以「视点(观察者)」→「投影面」→「物体」关系而投影视图的画法,即称为第三角法。亦称第三象限法。 2.第三角投影箱之展开方向,以观察者而言,为由远而近之方向翻转展开。3.第三角法展开后之六个视固排列如下,以常用之三视图而言,其右侧视图位於前视图之右侧,而俯视图则位於前视图之正上方。 CNS 相关规定 CNS中国国家标准之象限投影符号,系将一截头圆锥之前视图与左侧视图,依投影之排列而得。主要之区别为第一角法符号(左侧视图排在右边),而第三角法符号(左侧视图位在左边)。 对於正投影方法之使用,CNS规定第一角法或第三角法同等适用。但在同一张图纸上不可混合使用,且须在标题概内或其他明显处绘制符号或加注「第一角法」或「第三角法」字样。以作为读图之识别。 由於第二象限投影与第四象限投影因水平投影面旋转后与直立投影面重叠,致使投影视图线条混淆不清,增加绘固及识图不便,故不予采用。 欧洲各国盛行第一角法投影制,所以第一角法投影亦有「欧式投影制」之称呼。例如德国(DIN)、瑞士(VSM)、法国(NF).挪威(NS)等国家使用之。 美国采用第三角投影制,故有「美式投影制」之称呼。除美国(ANSI)外,尚盛行於美洲地区。而中华民国(CNS)、国际标准化机构(ISO)与日本[JIS]则采第一角法及第三角两制并行。 视图之排列,应依投影原理上下左右对齐排列,不得任意更换或未依据投影方式排置。 六种视图中最常用之三视图组合为:前视图、上视圆及右侧视图,一般均以L字形或逆向L字形之方式排列於图纸上。 我们国内用的是第一角画法,国外用第三角画法的比较多 第一角画法和第三角画法的区别是视图放的位置 第一角画法:左视图放右边,右视图放左边,上视图放下面,依此类推 第三角画法:左视图放左边,右视图放右边,上视图放上面,依此类推 类别:机械制图 | 添加到搜藏 | 浏览(3783) | 评论 (5)
第一、三角画法简介
第一角画法和第三角画法的区别 1.1基本概念 第一角投影法的概念 如图所示,由三个互相垂直相交的投影面组成的投影体系,把空间分成了八各部分,每一部分为一个分角,依次为Ⅰ、Ⅱ、Ⅲ、Ⅳ……Ⅶ、Ⅷ分角。将机件放在第一分进行投影,称为第一角画法。而将机件放在第三分角进行投影,称为第三角画法,第三角画法主要是欧美等西方国家采用,我国等一些国家采用第一角画法,下面将分别介绍并着重介绍第一角画法。 1.2 第一角画法概念 为了清晰地表达机件六个方向的形状,可在H、V、W三投影 面的基础上,再增加三个基本投影面。这六个基本投影面组成 了一个方箱,把机件围在当中,如图6—1(a)所示。机件在 每个基本投影面上的投影,都称为基本视图。图6—1(b)表示 机件投影到六个投影面上后,投影面展开的方法。展开后,六 个基本视图的配置关系和视图名称见图6—1(c)。按图6—1 (b)所示位置在一张图纸内的基本视图,一律不注视图名称。
六个基本视图的投影和展开 六个基本视图的配置 1.3 投影规律 六个基本视图之间,仍然保持着与三视图相同的投影规律,即: 主、俯、仰、(后):长对正; 主、左、右、后:高平齐; 俯、左、仰、右:宽相等。
此外,除后视图以外,各视图的里边(靠近主视图的一边),均表示机件的后面,各视图的外边(远离主视图的一边),均表示机件的前面,即“里后外前”。 1.4 向视图 有时为了便于合理地布置基本视图,可以采用向视图。向视图是可自由配置的视图,它的标注方法为:在向视图的上方注 写“×”(×为大写的英文字母,如“A”、“B”、“C”等),并在相应视图的附近用箭头指明投影方向,并注写相同的字母。 向视图的画法 1.2 局部视图 1.2.1概念 只将机件的某一部分向基本投影面投射所得到的图形,称为局部视图。 局部视图是不完整的基本视图,利用局部视图可以减少基本视图的数量,使表达简洁,重点突出。例如图6—3 (a)所示工件,画出了主视图和俯视图,已将工件基本部分的形状表达清楚,只有左、右两侧凸台和左侧肋板的厚度尚未表达清楚,此时便可象图中的A向和B向那样,只画出所需要表达的部分而成为局部
历史三角法教学
市级教研活动——优秀案例及教学设计评比 标题:历史三角法教学摘要:前提、升华、技巧、体验 人物 体验 事件思想 主题词:历史三角法教学 作者:李健伟 单位:贡井区五宝中学 组别:历史 时间:2011年9月16日
历史三角法教学案例 ——美国独立战争 历史是一门科学。既然历史是科学,透过现象就可以把握一定的规律;既然历史是科学,通过学习就可以指导人们的生活;既然历史是科学,在探索中就可以使人升华某种历史体验——趣味和感受。 于是,笔者经过多年教学形成了“历史三角法教学”法。 三角法教学可以用结构示意来直观的体现其有机关系。如下图: (姓名、引领文明) 人物 体验 事件思想 (名称、原因、性质、积极影响)(人物品质、事件价值)历史三角法教学中要处理好四个方面。 一、前提:诗化历史缘分,吸引学生。“曾经,千百次、千百次相遇,我们不曾相识;曾经,千百次、千百次相识,我们不曾相聚;曾经,千百次、千百次相聚,我们不曾相知。如今,第一次、第一次因教与学,我们终于在历史长河中,高唱同一首歌——缘分历史。 二、升华:趣味历史作用,感动学生。“历史科学,在于勤学;三角探课,要素掌握;夯实基础,整合知识;谈古论今,体验升华;学以致用,理家治国。”
三、技巧:三角历史教学,轻松学生。人物、事件、体验是不可分过的有机体,它们三者之间是什么关系呢?其中,人是核心,人总在做事,人总有思想。但事件和思想总是在人不知不觉的体验中左右人。所以学习历史,总可以把知识至于这三个有机体人物、事件、思想之中。 人物可按三要素来掌握,即姓名、评价。事件可依五要素来理解,即名称、原因、性质、积极影响、体验。思想可据四要素来剖析,即人物或文献名称、内容或主张、积极作用、体验。 四、案例:美国独立战争。 现以美国独立战争为案例解读“历史三角法教学“法。 美国独立战争可分解为三个部分来解读,即人物、事件、文献。 1、关于人物。请欣赏一段文字材料:他是“战争中的第一人,和平中的第一人,他的同胞心中的第一人”。 ——一个独立战争老兵的话由上述短文引发思考:他是谁?请你从贡献方面来评价他?我们应该学习他的什么有品质? 选举最后问题思考:我们应该学习华盛顿敢于斗争、不惧挫折,善于创新、遵守宪法等优秀平品质。 2、关于事件。请欣赏两幅图片材料:
线性代数化三角法
For personal use only in study and research; not for commercial use For personal use only in study and research; not for commercial use 1 化三角法 用行列式的性质将原行列式化为上(下)三角形行列式或对角形行列式,是计算三阶及三阶以上行列式基本方法和重要方法之一。 例1计算n阶行列式 解:含字母的行列式若直接化三角,会产生复杂的分数,庞大的计算量会造成解题困难甚至无法计算出结果。这种主对角线元素相同,其余元素相同的题型,可将第2行直至最后一行加到第一行,再化三角 2 降阶法 用行列式的性质使某行或某列零元素充分多,再按该行该列展开。 例2 计算行列式 化三角和降阶法是计算行列式的重要方法,甚至是有的高职学生仅会的方法,这显然是不够的。 3 加边法 有时为了计算行列式,在保值的前提下特意把原行列式加上一行一列使之更容易计算,这种计算行列式的方法称为加边法。加边法适用于所加边的元素与原行列式中的元素有相等或倍数关系等,或原行列式中有”大片”元素相同的行列式。 4 拆项法 由行列式拆项性质,将已知行列式拆成若干个行列式之和,计算各个行列式的值后再计算原式之值为拆项法。 5 递推法 用行列式的性质,把一个n阶行列式表示为具有相同结构的较低阶行列式(比如,n与n-1阶)的线性关系式,这种关系式称为递推关系式。根据递推关系式及某个低阶初始行列式(比如二阶或一阶行列式)的值,便可递推求得所给n阶行列式的值,这种计算行列式的方法称为递推法。使用递推法计算行列式,一般分三个步骤,首先找出递推关系式,然后算出结果,最后用数学归纳法证明结果正确。 6 数学归纳法 一般是利用不完全归纳法寻找出行列式的猜想值,再用数学归纳法给出猜想的证明。 通过上述例题的计算也可以看到计算一个行列式的值不仅局限一种方法,甚至有时要综合用到多种方法才能求出其值。因此,计算行列式时,要针对行列式的结构特点,选取恰当的方法,才能较快地算出行列式。 7 利用软件Matlable软件计算 在软件Matlable中,数据是以矩阵形式贮存和运算的,在输入行列式矩阵后,用函数det求职。 用该软件计算行列式虽然方便简单,但是不能起到锻炼学生的计算能力和思维能力的作用,不作为主要方法介绍,仅供参考。 参考文献: [1]朱长坤.应用高等数学基础.上海交通大学出版社.2005.189.
第三角与第一角投影的区分
第三角与第一角投影的区分 机械三视图的第三角法和第一角法划分 三视图的第三角法和第一角法划分: 一、第一角投影法 1.凡将物体置於第一象限内,以「视点(观察者)」→「物体」→「投影面」关系而投影视图的画法,即称为第一角法。亦称第一象限法。, 2.第一角投影箱之展开方向,以观察者而言,为由近而远之方向翻转展开。 3.第一角法展开后之视图排列如下,以常用之三视图(前视、俯视、右侧视图)而言,其右侧视图位於前视图之左侧,俯视固则位於前视图之正下方。 二.、第三角投影法 1.凡将物体置於第三象限内,以「视点(观察者)」→「投影面」→「物体」关系而投影视图的画法,即称为第三角法。亦称第三象限法。 2.第三角投影箱之展开方向,以观察者而言,为由远而近之方向翻转展开。 3.第三角法展开后之六个视固排列如下,以常用之三视图而言,其右侧视图位於前视图之右侧,而俯视图则位於前视图之正上方。 CNS 相关规定 CNS中国国家标准之象限投影符号,系将一截头圆锥之前视图与左侧视图,依投影之排列而得。主要之区别为第一角法符号(左侧视图排在右边),而第三角法符号(左侧视图位在左边)。 对于正投影方法之使用,CNS规定第一角法或第三角法同等适用。但在同一张图纸上不可混合使用,且须在标题概内或其他明显处绘制符号或加注「第一角法」或「第三角法」字样。以作为读图之识别。 由於第二象限投影与第四象限投影因水平投影面旋转后与直立投影面重叠,致使投影视图线条混淆不清,增加绘固及识图不便,故不予采用。 欧洲各国盛行第一角法投影制,所以第一角法投影亦有「欧式投影制」之称呼。例如德国(DIN)、瑞士(VSM)、法国(NF).挪威(NS)等国家使用之。 美国采用第三角投影制,故有「美式投影制」之称呼。除美国(ANSI)外,尚盛行於美洲地区。而中华民国(CNS)、国际标准化机构(ISO)与日本[JIS]则采第一角法及第三角两制并行。 视图之排列,应依投影原理上下左右对齐排列,不得任意更换或未依据投影方式排置。 六种视图中最常用之三视图组合为:前视图、上视圆及右侧视图,一般均以L字形或逆向L字形之方式排列於图纸上。 我们国内用的是第一角画法,国外用第三角画法的比较多 第一角画法和第三角画法的区别是视图放的位置 第一角画法:左视图放右边,右视图放左边,上视图放下面,依此类推 第三角画法:左视图放左边,右视图放右边,上视图放上面,依此类推 在我们国家有关制图方面的国家标准中规定,我国采用第一角投影法。但有些国家(如美国、日本)则采用第三角投影法。伴随着我国的对外开放和W TO的加入及对外贸易和国际间技术交流的日趋增多,我们会越来越多的接触到采用第三角投影法绘制的图纸。为了更好地进行国际间的技术交流和发展国际贸易的需要,我们应该了解和掌握第三角投