将车辆的二自由度模型用能控标准型状态方程来表示
将车辆的二自由度模型用能控标准型状态方程来表示
系统状态方程的表达式不是唯一的,可根据需要建立不同形式的状态方程,如能控标准型、能观标
准型、约当型等。
状态方程是一阶微分方程或一阶差分方程,便于采用数值解法。系 统内部的物理量都可用状态矢量的分量来表示。 dX(t)/dt=AX(t)+BU(t) Y(t)=CX(t)+DU(t) X(t0)=X0
模型参数: 简记为(A,B,C,D) 系统系数矩阵A ?(nxn 维) 系统输入矩阵B ?(nxm 维) 系统输出矩阵C ?(rxn 维) 直接传输矩阵D ?(rxm 维
下面为横向动力学模型1/2车辆模型, 为了便于建立运动方程,做以下简化:
(1)忽略转向系统的影响,直接以前轮转角作为输入;
(2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且
l
r Z Z F F ;
(3)汽车前进速度u 视为不变;
(4)侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围;
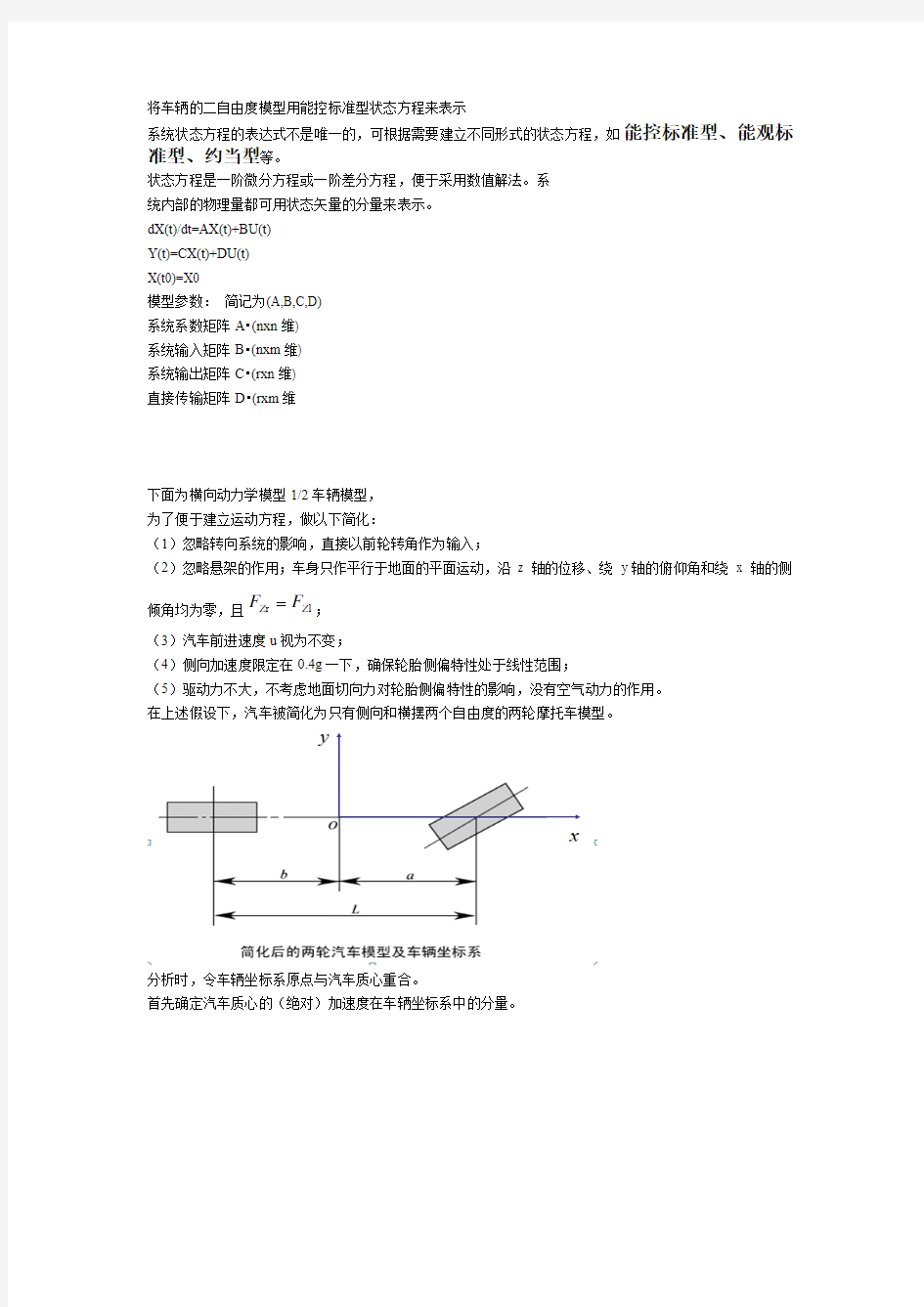
(5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用。 在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。
分析时,令车辆坐标系原点与汽车质心重合。
首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
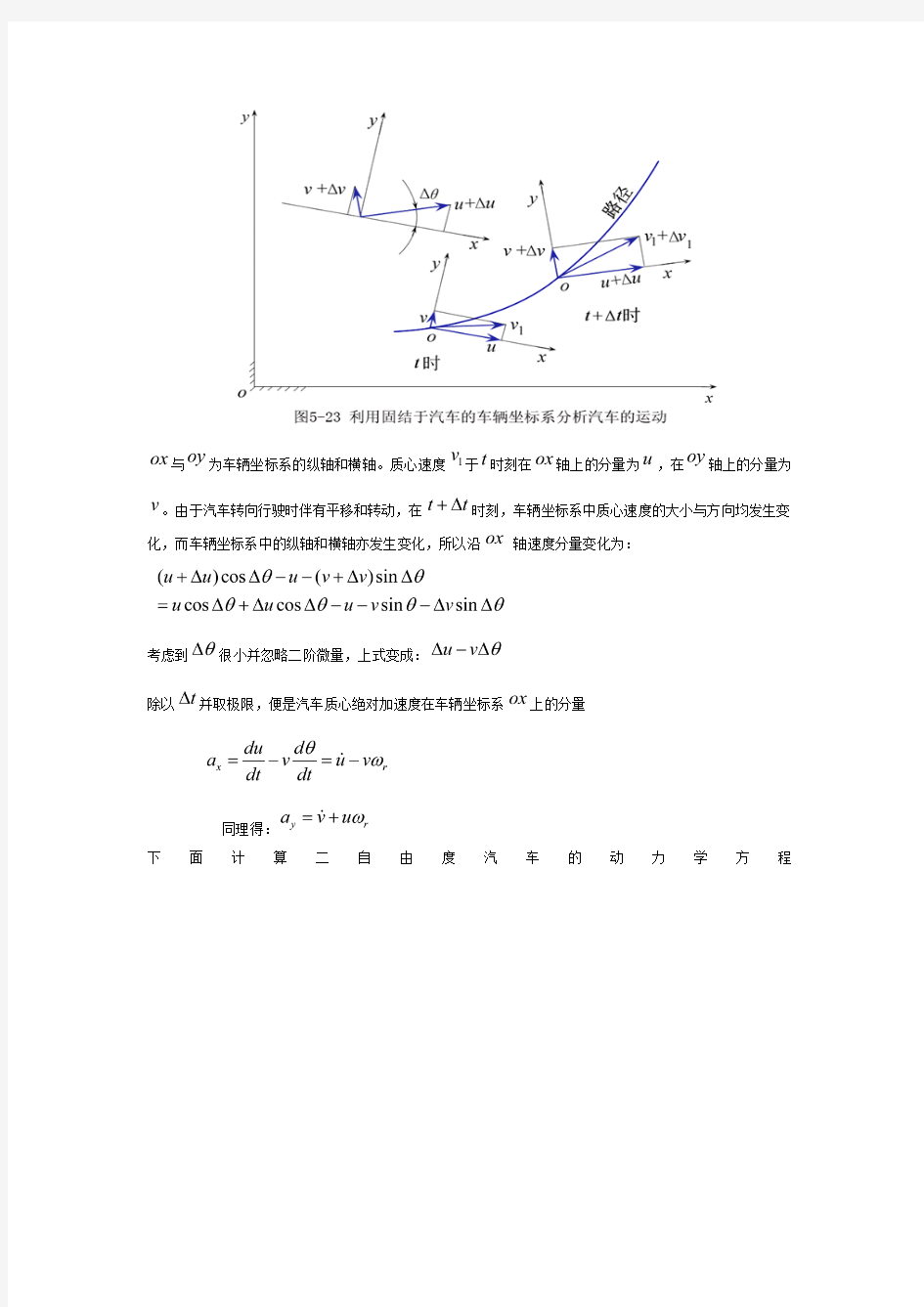
与为车辆坐标系的纵轴和横轴。质心速度于时刻在轴上的分量为,在轴上的分量为
化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿轴速度分量变化为:
考虑到很小并忽略二阶微量,上式变成:
除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量
下面计算二自由度汽车的动力学方程
二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为
式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。
考虑到很小,上式可以写成:
下面计算二自由度汽车的动力学方程
二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为
式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。
考虑到很小,上式可以写成:
汽车前后轮侧偏角与其运动参数有关。如上图所示,汽车前后轴中点的速度为,;前后轮侧偏角为,
;质心侧偏角为,;为与轴的夹角,其值为:
根据坐标系的关系,前后轮侧偏角为
由此,可以列出外力,外力矩与汽车参数的关系式为
所以,二自由度汽车的运动微分方程为
由此,可以列出外力,外力矩与汽车参数的关系式为
所以,二自由度汽车的运动微分方程为
上式可以变形为:
写成可控标准型状态方程为:
如下
中
汽车模型的背景、现状与前景
汽车模型的背景、现状与前景 1927年美国通用汽车公司将油泥应用到汽车设计开发模型上,1955年日本首次使用工业油泥进行汽车模型的设计开发,我国则在70年代初开始应用这一技术。汽车模型工是在80年代初期形成的,目前从业人员大约有1000多人,分布在全国20多个省100多家汽车生产企业。 汽车模型工是设计师与工程师之间的桥梁,没有这个桥梁汽车设计将无法进行。由于汽车车身设计程序要经过汽车效果图、小比例模型制作、1:1模型制作、模型数据采集、修线修面、结构设计等设计过程,因此汽车模型工水平的高低将直接影响到汽车产品开发的进度和质量。一个1:1的汽车油泥模型需要四人同时制作,制作周期为3-4个月,1:1内饰模型需要两人同时制作,制作周期为2-3个月,小比例模型制作周期为2个月。一般规模的汽车生产企业一年能开发2个或更多个新产品。 在欧美国家,汽车模型工可在专门的职业培训机构进行系统培训,在日本也有一些职业培训学校开设了汽车模型工的专业课程。国内目前没有专门的汽车模型工职业培训学校,汽车模型工都是各汽车厂内部自己培养的技术工人。一些有条件的汽车厂,如:解放汽车公司、东风汽车公司只能将该厂的汽车模型工送到国外进行培训,或通过国外代理商组织的专业培训班来提高技术水平。如,日本在中国的汽车模型工代理商每年在上海举办一次汽车模型工培训班,为国内汽车厂家培训了大批的汽车模型工。一方面,企业不可能大批量的培养人才,导致了汽车模型工人才的紧缺,使得国内很多的汽车生产企业无自主产品开发能力;另一方面,国内的汽车模型工与国外的汽车模型工的技术水平相比较还有很大的差距,从而限制了我国汽车工业的发展。
详细步骤MATLAB车辆两自由度操纵稳定性模型分析
基于MATLAB的车辆两自由度操纵稳定性模型及分析 汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。 车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。 1二自由度汽车模 为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2 运动学分析 确定汽车质心的(绝对)加速度在车辆坐标系的分量 和。Ox 与Oy 为车辆坐标系的纵轴与横轴。质心速度 与t 时刻在Ox 轴上 的分量为u ,在oy 轴上的分量为v 。 2.1 沿Ox 轴速度分量的变化为: ()()cos sin cos cos sin sin u u u v v u u u v v θθ θθθθ+??--+??=?+??---?? 考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便 是汽车质心绝对加速度在车辆坐标系。
沿Ox 轴速度分量的变化为: u x r d d v u v dt dt a θω=-=- 同理,汽车质心绝对加速度沿横轴oy 上的分量为:y r v u a ω=+ 2.2 二自由度动力学方程 二自由度汽车受到的外力沿y 轴方向的合力与绕质心的力矩和为: 12 12cos a cos Y Y Y Z Y Y b F F F M F F δδ=+=-∑∑ 式中,,为地面对前后轮的侧向反作用力;为前轮转角。 考虑到很小,上式可以写上: 11221122 a Y Z b k k F k k M αα αα=+=-∑∑ 根据坐标系的规定,前后侧偏角为: ()12r r r a u v b b u u δξβδβωαωωα=--=+ --==- 由此,可以列出外力,外力矩与汽车参数的关系式为: 1212r r Y r r Z a b u u a b a b u u k k F k k M βδββδβωωωω????=+-+- ? ?????????=+--- ? ????? ∑∑ 所以,二自由度汽车的运动微分方程为: ()1212r r r r r z r a b m v u u u a b a b u u k k k k I βδββδβωωωωωω????+-+-=+ ? ?????????+---= ? ???? ? 上式可以变形为:
岩土类材料弹塑性力学模型及本构方程
岩土类材料弹塑性力学模型及本构方程 TYYGROUP system office room 【TYYUA16H-TYY-TYYYUA8Q8-
岩土类材料的弹塑性力学模型及本构方程 摘要:本文主要结合岩土类材料的特性,开展研究其在受力变形过程中的弹性及塑性变形的特点,描述简化的力学模型特征及对应的适用条件,同时在分析研究其弹塑性力学模型的基础上,探究了关于岩土类介质材料的各种本构模型,如M-C、D-P、Cam、D-C、L-D及节理材料模型等,分析对应使用条件,特点及公式,从而推广到不同的材料本构模型的研究,为弹塑性理论更好的延伸发展做一定的参考性。 关键词:岩土类材料,弹塑性力学模型,本构方程 不同的固体材料,力学性质各不相同。即便是同一种固体材料,在不同的物理环境和受力状态中,所测得的反映其力学性质的应力应变曲线也各不相同。尽管材料力学性质复杂多变,但仍是有规律可循的,也就是说可将各种反映材料力学性质的应力应变曲线,进行分析归类并加以总结,从而提出相应的变形体力学模型。 第一章岩土类材料 地质工程或采掘工程中的岩土、煤炭、土壤,结构工程中的混凝土、石料,以及工业陶瓷等,将这些材料统称为岩土材料。 岩土塑性力学与传统塑性力学的区别在于岩土类材料和金属材料具有不同的力学特性。岩土类材料是颗粒组成的多相体,而金属材料是人工形成的晶体材料。正是由于不同的材料特性决定了岩土类材料和金属材料的不同性质。归纳起来,岩土材料有3点基本特性:1.摩擦特性。2.多相特性。3.双强度特性。另外岩土还有其特殊的力学性质:1.岩土的压硬性,2.岩土材料的等压屈服特性与剪胀性,3.岩土材料的硬化与软化特性。4.土体的塑性变形依赖于应力路径。 对于岩土类等固体材料往往在受力变形的过程中,产生的弹性及塑性变形具备相应的特点,物体本身的结构以及所加外力的荷载、环境和温度等因素作用,常使得固体物体在变形过程中具备如下的特点。 固体材料弹性变形具有以下特点:(1)弹性变形是可逆的。物体在变形过程中,外力所做的功以能量(应变能)的形式贮存在物体内,当卸载时,弹性应变能将全部释放出来,物体的变形得以完全恢复;(2)无论材料是处于单向应力状态,还是复杂应力状态,在线弹性变形阶段,应力和应变成线性比例关系;(3)对材料加载或卸载,其应力应变曲线路径相同。因此,应力与应变是一一对应的关系。 固体材料的塑性变形具有以下特点:(l)塑性变形不可恢复,所以外力功不可逆。塑性变形的产生过程,必定要消耗能量(称耗散能或形变功);(2)在塑性变形阶段,应力和应变关系是非线性的。因此,不能应用叠加原理。又因为加载与卸载的规律不同,应力与应变也不再存在一一对应的关系,也即应力与相应的应变不能唯一地确定,而应当考虑到加载的路径(即加载历史);(3)当受力固体产生塑性变形时,将同时存在有产生弹性变形的弹性区域和产生塑性变形的塑性区域。并且随着载荷的变化,两区域的分界面也会产生变化。 第二章弹塑性力学中常用的简化力学模型 对于不同的材料,不同的应用领域,可以采用不同的变形体模型。在确定力学模型时,要特别注意使所选取的力学模型必须符合材料的实际情况,这是非常重要的,因为只有这样才能使计算结果反映结构或构件中的真实应力及应
二自由度简易云台增稳控制系统设计
二自由度简易云台增稳控制系统设计 项目简介:本课题要求学生在查阅相关资料的基础上,利用单片机、IMU姿态测量元件、舵机等设备搭建二自由度增稳控制平台,设计姿态数据的读取程序,设计舵机的控制程序,设计增稳平台的机械结构,对所设计的程序进行调试,实现云台的增稳控制。 项目方案: 本课题分以下步骤展开研究: 2014年4月~ 2014年10月 收集有单片机接口程序设计方面的资料,学习相关理论知识; 2014年11月~2014年12月 学习MWC飞行控制板的程序设计技术; 2015年1月~2015年4月 设计板载姿态传感器数据读取; 2015年5月~ 2015年8月 设计舵机控制程序和平台机械结构,测试平台增稳性能; 2015年9月~2015年10月 撰写研究报告、结题,项目鉴定。 本项目主要使用MWC飞行控制板和舵机实现二自由度平台的增稳控制 预期成果: 本项目要求完成如下成果: 设计并实现二自由度增稳平台的软、硬件系统,搭建增稳平台的机械结构,完成系统的负载测试。完成研究报告一份。 二自由度云台概述: 云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的联结。其英文名称为Pan-Tilt(简称PT),即可以在水平方向和俯仰方向旋转的机械装置。主要用于安装监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接方便;在需要摇摆和摆动的机构中,如机械臂等,也利用云台来实现可接触范围的延伸和扩展。 根据云台的回转特点可以分为只能左右旋转的水平旋转平台和既能左右旋转又能上下旋转的全方位云台,即二自由度(2-Degree of Freedom)云台,简称2-DOF云台。 增稳的意义: 比如飞行器在飞行过程中,由于自身的抖动以及外界因素对它的影响,它的姿态不断变化,装在上面的图像采集装置一起变化,导致图像的不稳定。如果采用反馈控制原理,先测量姿态变化,再传输到控制装置(舵机),达到稳像的目的。将一个二自由度的稳像平台与遥控直升机恰当地结合在一起,实现了在飞行过程中跟踪目标稳定图像,保持图像质量的功能。
双自由度控制器
第一章绪论 在工程和科学技术发展过程中,自动控制担负着重要的角色。除了在宇宙飞船系统、导弹制导系统和机器人系统等领域中,自动控制具有特别重要的作用之外,它已成为现代机器制造业和工业生产过程中的重要而不可缺少的组成部分。例如,在制造工业的数控机床控制中,在航空和航天工业的自动驾驶仪系统设计中,以及在汽车工业的小汽车和大卡车设计中,自动控制都是必不可少的。此外,在工业中的过程控制,对压力、温度、湿度、黏性和流量的控制等工业操作过程,自动控制也是不可缺少的。 自动控制理论和实践的不断发展,为人们提供了获得动态系统最佳性能的方法,提高了生产率,并且使人们从繁重的体力劳动和大量重复性的手工操作中解放出来。 1.2控制系统的分类 1.2.1 反馈控制系统 能对输出量与参考输入量进行比较,并且将它们的偏差作为控制手段,以 保持两者之间预定关系的系统,称为反馈控制系统。室温控制系统就是反馈系统的例子。通过实际室温,并且将其与参考温度(希望的室温)进行比较,温室调机器就会按照某种方式,加温或冷却设备打开或关闭,从而将室温保持在使人们感到舒适的水平上,且与外界条件无关。反馈系统并不限于工程系统,在各种不同的非工程领域,同样存在着反馈控制系统。 1.2.2 闭环控制系统 反馈控制系统通常属于闭环控制系统。在实践中,反馈控制和闭环控制这两个术语通常交换使用。在闭环控制系统中,作为输入信号与反馈信号(反馈信号可以是输出信号本身,也可以是输出信号的函数及其导数和/或其积分)之差的作用误差信号被传送到控制器,以便减小误差,并且使系统的输出达到希望的值。闭环控制这个术语,总是意味着采用反馈控制作用,以减小系统误差。
线性二自由度汽车模型的运动微分方程
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且 l r Z Z F F ; (3)汽车前进速度u 视为不变; (4)侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用。 在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 与 为车辆坐标系的纵轴和横轴。质心速度 于时刻在 轴上的分量为 ,在 轴上的分量为 。由于汽车转向行驶时伴有平移和转动,在时刻,车辆坐标系中质心速度的大小与方向均发生变 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿 轴速度分量变化为:
考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量 同理得: 下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成:
下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成: 汽车前后轮侧偏角与其运动参数有关。如上图所示,汽车前后轴中点的速度为,;前后轮侧偏角为, ;质心侧偏角为,;为与轴的夹角,其值为:
高分子 材料成型 本构方程
本构方程在高分子科学和高分子工程中的应用 (吴其晔,高分子材料流变学) 判断一个本构方程的优劣主要考察: 1)方程的立论是否科学合理,论据是否充分,结论是否简单明了。 2)一个好的理论,不仅能正确描写已知的实验事实,还应能预言至今未知,但可能发生的事实。 3)有承前启后的功能。例如我们提出一个描写非线性粘弹流体的本构方程,当条件简化时,它应能还原为描写线性粘弹流体的本构关系。 4)最后也是最重要的一条,即实验事实(实验数据)是判断一个本构方程优劣的出发点和归宿。实践是检验真理的唯一标准。 对高分子液体流变本构方程理论和实验规律的研究对于促进高分子材料科学,尤其高分子物理的发展和解决聚合物工程中(包括聚合反应工程和聚合物加工工程)若干重要理论和技术问题都具有十分重要的意义。 一则由于高分子材料复杂的流变性质需要精确地加以描述,二则由于高新技术对聚合物制品的精密加工和完美设计提出越来越高的要求,因此以往那些对材料流动性质的经验的定性的粗糙认识已远远不够。 众所周知,高分子结构研究(包括链结构、聚集态结构研究)以及这种结构与高分子材料作为材料使用时所体现出来的性能、功能间的关系研究始终是高分子物理研究的主要线索。与“静态”的结构研究相比,高分子“动态”结构的研究,诸如分子链运动及动力学行为、聚集态变化的动力学规律、
高分子流体的非线性粘弹行为等,更是近年来引人注目的前沿领域。按现代凝聚态物理学的概念,高分子体系被称为软物质(soft matter)或复杂流体(complex fluids)。所谓软物质,即材料在很小的应变下就会出现强烈的非线性响应,表现出独特的形态选择特征。这正是高分子流体的本征特点。如果能精确描述出高分子液体的复杂应力-应变关系,找出这种关系与材料的各级结构间的联系,无疑对高分子凝聚态理论的发展具有重要意义。 在高分子工程方面,当前各种各样新型合成技术及新成型方法、新成型技术(如反应加工成型、气辅成型、振动剪切塑化成型、特种纤维的纺制、新成纤技术等)陆续问世,在每一种技术发展过程中,研究高分子液体(熔体、溶液)的流动规律以及新工艺过程与高分子材料结构性能控制的关系,都是最重要的课题。高分子材料的特点之一是它们的物理力学性能不完全取决于化学结构。化学结构一定的高分子材料可以由于不同的聚集状态(凝聚态结构)而显示出不同性质。在工业上,这不同的凝聚态大多是由于不同的加工成型方法而造成的。因此采用流变本构方程精确地研究和设计成型方法和成型设备,通过在成型过程中对高分子形态的主动控制来获得性能更为优越的新型材料,是高分子工程中的重要热点课题。 要完成这些任务,仅有对高分子熔体和溶液的流动性质粗浅的认识(比如仅仅测量粘度)是不够的。取而代之的是要对大形变下高分子材料的反常的流变性质给出全面的定量的理性描写,要为解决高分子材料合成和加工中出现的流体动力学和应力分析问题提供一种解决问题的手段。目前,高分子流变学的基本原理和方法已深入到高分子科学研究和高分子材料合成和加工工程的各个领域。许多领域中,如高分子材料设计、配方设计、模
线性二自由度汽车模型的运动微分方程
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z轴的位移、绕y轴的俯仰角和绕x轴的侧倾角均为零,且F Zr Fzi ; (3)汽车前进速度u视为不变; (4)侧向加速度限定在0.4g —下,确保轮胎侧偏特性处于线性围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 閒代后护曲轮汽车枠即及车辆咐标丟 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 "T与W为车辆坐标系的纵轴和横轴。质心速度V l于f时刻在轴上的分量为|/<,在°匸轴上的分量为 卜。由于汽车转向行驶时伴有平移和转动,在'时刻,车辆坐标系中质心速度的大小与方向均发生变 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿'■轴速度分量变化为: (? + Av)sin A" =u cos A6? + cos A 0 it -vsin 0 Avsin \0 考虑到△ 6很小并忽略二阶微量,上式变成:\u -K A0
除以Ar并取极限,便是汽车质心绝对加速度在车辆坐标系\ox上的分量 du dO * a -- ----- v——= n-va) x dt dt r 同理得:叭"刊叫 下面计算二自由度汽车的动力学方程 < ------------------------------ --------------------------------------- ih 二自由度汽车受到的外力沿匸"|轴方向的合力与绕质心的力矩和为 》禺=洛心方"二11 式中,如,比为地面对前后轮的侧向反作用力,即侧偏力;/为前轮转角考虑到’很小,上式可以写成:
最新ANSYS材料模型汇总
A N S Y S材料模型
第七章材料模型 ANSYS/LS-DYNA包括40多种材料模型,它们可以表示广泛的材料特性,可用材料如下所示。本章后面将详细叙述材料模型和使用步骤。对于每种材料模型的详细信息,请参看Appendix B,Material Model Examples或《LS/DYNA Theoretical Manual》的第十六章(括号内将列出与每种模型相对应的LS-DYNA材料号)。 线弹性模型 ·各向同性(#1) ·正交各向异性(#2) ·各向异性(#2) ·弹性流体(#1) 非线弹性模型 ·Blatz-ko Rubber(#7) ·Mooney-Rivlin Rubber(#27) ·粘弹性(#6) 非线性无弹性模型 ·双线性各向同性(#3) ·与温度有关的双线性各向同性(#4) ·横向各向异性弹塑性(#37) ·横向各向异性FLD(#39) ·随动双线性(#3) ·随动塑性(#3) ·3参数Barlat(#36) ·Barlat各向异性塑性(#33)
·与应变率相关的幂函数塑性(#64) ·应变率相关塑性(#19) ·复合材料破坏(#22) ·混凝土破坏(#72) ·分段线性塑性(#24) ·幂函数塑性(#18) 压力相关塑性模型 ·弹-塑性流体动力学(#10) ·地质帽盖材料模型(#25) 泡沫模型 ·闭合多孔泡沫(#53) ·粘性泡沫(#62) ·低密度泡沫(#57) ·可压缩泡沫(#63) ·Honeycomb(#26) 需要状态方程的模型 ·Bamman塑性(#51)·Johnson-Cook塑性(#15)·空材料(#9) ·Zerilli-Armstrong(#65) ·Steinberg(#11) 离散单元模型 ·线弹性弹簧
云台两自由度控制
云台两自由度控制 作者:04——715班王天指导老师:李 云台是搭载激光测距仪座,摄像头座,机械手座之物,为这些仪器部件提供更大的适用范围。 此品主要采用蜗轮蜗杆的结构来作为传动机构。 其优点是可以得到很大的传动比,比交错轴斜齿轮机构紧凑,因为线接触,故承载能力比交错轴斜齿轮大得多,另外传动平稳无噪音,这样仿生蛇可以执行更隐蔽的任务。还有蜗杆的到程角r小于轮齿间的当量摩擦角时,机构具有自锁性,即只能由蜗杆带动蜗轮,而不能有蜗轮带动蜗杆,这样便于抬板稳定在某一位置工作。而蜗轮蜗杆将纵向转动变为侧向转动方可以使我们的布局更合理。 当然蜗轮蜗杆机构也具有一定的缺点,(1)齿合时相对滑动速度v较大,以磨损,以发热股效率低,而对于具有自锁性的蜗杆传动其效率更低。(2)为了散热和减小摩擦,常需贵重的抗磨材料和良好的润滑装置,故成本较高(3)蜗杆的轴向力较大。看起来去点多多,但在我们的设备本身的运作状况下这些也便不再是缺点了。首相我们的设备转速要求不大,阻力也不大,并不要求时刻保持运作,因此以磨损,易发热,效率较低情况便可忽略。也因如此便不用采用贵重的材料了,所以成本的问题也便不再成为问题。因为阻力不大,轴向力大的问题也便不是问题了。 我们用的电机是瑞士产的ZGR17AL支流减速电机。每分钟转速15转。正好可以迎合我们的设备不需要告诉运作的要求,而起匀速,慢速转动的特性,可以很好的进行控制,在开环控制的情况下获得较大的精度。 控制用数字化控制,利用双极坐标控制,(X,Y).X为底盘转角。Y为台办的转角。X介于0度到360度之间,Y介于0度到90度之间。我们并没有安装测算转过角度的设备,我们通过测算电机转动时间来推算转过的角度,此过程在我们要求转动精度不高的情况下是一种很实用经济有效的手法。我们的转盘上安装一个触碰开关,这样在每次反应前,反转,当碰及触碰开关时停止,以此作为基准。这个既为校准的过程,此位置作为0度。在开始转动命令要求的角度。如此,可以是误差不累加化,提高了工作精度! 我们的电子系统主要是利用plcc封装的51单片机来进行控制,其优点在于功能全面执行能力强,开发工具完善,衍生产品丰富,大量的设计资源可以继承和共享。此单片机成本较低,可以反复擦写1000次左右,可以在没有仿真器的情况下进行反复测试。有效的降低了成本,而plcc封装是正方形而且体积小重量轻,安装于抬板上,云台上,其重心较为稳定,可避免在蛇身高速运动,灵活转向时出现不必要的问题。而运抬要升高到很高高度时,其承载能力较差,所以减轻重量是必要之举。而且使用此单片机可是总体电路紧凑,简明,便于制作和日后维修。 工作原理简述:从并口输入坐标值(X,Y).经过程序中的一套算法,其中包括蜗轮蜗杆的传动比,电机转速,时钟,底座(齿轮)半径,始终,最后转化为电机开启时间,使设备转到预定位置。
材料模型与状态方程
1 John-Cook 材料本构模型 )1)(ln 1)((**m n p y T C B A -++=εεσ& 式中, p ε —— 等效塑性应变; * ε & —— 0.10=ε&s -1的无量纲塑性比,0 * εεε&&&p =; *T —— 相对温度,room melt room T T T T T --= * A —— 屈服应力,Pa ; B —— 应变硬化系数,Pa ; n —— 应变硬化指数; C —— 应变率相关系数; m —— 温度相关系数。 表达式的第一项)(n B A ε+ 表示对于0.1*=ε&和0*=T (等温状态)时的应力与应变的函数关系;表 达式的第二项)ln 1(* ε &C +和第三项)1(*m T -分别表示应变和率温度的影响。 表 Johnson 和Cook 给出的值 韩永要《弹道学报》第16卷第2期
603钢 7.85 210 0.220 792 180 0.016 0.12 1.0 1520 294 (断裂破坏时的)应变 ]1][ln 1][[*5*421* 3 T D D e D D D f +++=εεσ 其中,D 1、D 2、D 3、D 4、D 5输入参数, *是压力与有效应力之比,eff p σσ /* =。 当破坏参数∑ ?=f p D ε ε 达到1时,发生破坏。 * Hirofumi Iyama, Kousei Takahashi, Takeshi Hinata, Shigeru Itoh .Numerical Simulation of Aluminum Alloy Forming Using Underwater Shock Wave .8th International LS-DYNA Users Conference E/GPa A/MPa B/MPa C n m T melt /K T room /K A7039 337 343 0.01 0.41 1.00
二自由度机器人的位置控制
实验二自由度机器人的位置控制 一、实验目的 1. 运用Matlab语言、Simulink及Robot工具箱,搭建二自由度机器人的几何模 型、动力学模型, 2. 构建控制器的模型,通过调整控制器参数,对二自由度机器人的位姿进行控 制,并达到较好控制效果。 二、工具软件 1.Matlab软件 2.Simulink动态仿真环境 3.robot工具箱 模型可以和实际中一样,有自己的质量、质心、长度以及转动惯量等,但需要注意的是它所描述的模型是理想的模型,即质量均匀。这个工具箱还支持Simulink的功能,因此,可以根据需要建立流程图,这样就可以使仿真比较明了。 把robot 工具箱拷贝到MATLAB/toolbox文件夹后,打开matalb软件,点击file--set path,在打开的对话框中选add with subfolders,选中添加MATLAB/toolbox/robot,保存。这是在matlab命令窗口键入roblocks就会弹出robot 工具箱中的模块(如下图)。
三、实验原理 在本次仿真实验中,主要任务是实现对二自由度机器人的控制,那么首先就要创建二自由度机器人对象, 二自由度机器人坐标配置 仿真参数如下表1: 表1 二连杆参数配置
1.运动学模型构建二连杆的运动学模型,搭建twolink模型在MATLAB命令窗口下用函数drivebot(WJB)即可观察到该二连杆的动态位姿图。 %文件名命名为自己名字的首字母_twolink %构造连杆一 L{1}=link([0 0.45 0 0 0],'standard') ; L{1}.m=23.9 ;
汽车模型的设计及数控加工
2012届本科毕业论文(设计)论文题目:汽车模型的设计及数控加工 学生姓名: 所在院系:机电学院 所学专业:机械设计制造及其自动化 导师姓名: 完成时间:2012年5月18日
摘要 数控机床是典型的机电相融合的机电一体化产品,CAD/CAM是计算机科学同机械工程交叉的结果。本课题主要是对汽车模型进行设计并用数控机床加工,在设计和加工过程中,用Solid Works进行造型设计, CAXA制造工程师来生成加工轨迹路线和加工代码,然后采用数控机床进行各个零件的加工,最终完成模型组装。 关键词:数控机床,造型设计,Solid Works ,CAXA制造工程师,数控加工 Abstract CNC machine tool is typical of combining electromechanical integration of the mechanical and electronic products,CAD/CAM is computer science with mechanical engineering cross results. This topic is mainly to the car model design and CNC machine tool processing, in the design and processing process, with Solid Works on model design, CAXA manufacturing engineers to generate processing track route and processing code, then the CNC machine tools for various pats processing ,finally complete assembly model. Keywords:CNC Machine Tool , Model Design ,Solid Works ,CAXA Manufacturing Engineers ,CNC Machining
线性二自由度汽车模型的运动方程
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且 l r Z Z F F ; (3)汽车前进速度u 视为不变; (4)侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用。 在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 与 为车辆坐标系的纵轴和横轴。质心速度 于时刻在 轴上的分量为 ,在 轴上的分量为 。由于汽车转向行驶时伴有平移和转动,在时刻,车辆坐标系中质心速度的大小与方向均发生变 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿 轴速度分量变化为:
考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量 同理得: 下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成:
下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成: 汽车前后轮侧偏角与其运动参数有关。如上图所示,汽车前后轴中点的速度为,;前后轮侧偏角为,;质心侧偏角为,;为与轴的夹角,其值为:
制作简单汽车模型教学设计实施方案
目录 一、教学设计 课程名称汽车机械基础教学时间90课时 学习单元制作简单汽车模型教学时间45课时 学习目标(细化) 1、学生通过与顾客沟通,掌握与顾客沟通地技巧; 2、学生根据顾客地描述,确认顾客委托任务; 3、学生通过查找资料收集相关信息,制定出制作简单汽车模型地工作计划; 4、学生能够初步掌握常用工具、量具地操作方法与技能以及维护保养知识; 5、能正确解释汽车常用金属材料牌号地意义,知道汽车常用材料机械性能和适宜采用地工艺方法;能解释汽车零件地材料性能、牌号及加 工地方法. 1 / 21
6、学生能够掌握识读汽车基本地零件图和简单装配图、各种结构、工作示意图,对图地理解正确,并能说明结构、工作示意图所表达地意 思. 7、学生能够掌握钳工基础知识,钳工工艺加工地编程;钳工工艺基础理论知识; 8、合理选择和正确使用改锥及各类扳手等常用通用工具; 合理选择和正确使用外径千分尺、游标卡尺、百分表等通用量具,测量结果准确. 9、让学生在实践中培养安全和维护质量意识,并且认真履行工作安全和环境保护地规定; 10、学生对工作结果进行记录并对结果加以分析总结; 11、学生要对实习设备工具、车辆、仪器、环境、人身安全认真负责; 12、通过小组学习培养团队协作意识; 13、与顾客,上级和同事进行沟通并对工作情况进行说明; 14、提升环保和节约意识,对可重复利用材料合理使用; 15、严格遵守用电安全、生产条例,规范操作 工作任务工作过程导向教学突破点教学设备设施要求 情境模拟:机修工人从销售商处接受制作金属汽车模型地任务,加工后成品收购进行销售. 零件加工尺寸、加工余量 金属零件钳工加工 汽车维修钳工基本工具: 划线:划针、划线盘、高度游标卡尺、划规、 2 / 21
汽车销售管理系统概念模型设计
电子科技大学 标准实验报告(实验)课程名称数据库原理综合实验 电子科技大学教务处制表
电子科技大学 实验报告 学生姓名: 学号: 指导教师: 实验地点: 实验时间:2017年5月2日 一、实验室名称: 二、实验项目名称:汽车销售管理系统概念模型设计 三、实验学时:4 四、实验原理: 概念结构是对现实世界的一种抽象(常用抽象有:分类、聚类、概括),从实际的人、物、事和概念中抽取所关心的共同特性,忽略非本质的细节,把这些特性用各种概念精确地加以描述,这些概念组成了某种模型。通常用E-R图描述实体、属性、实体之间的关系。将不能再具有描述性质以及不与其他实体有联系的事物作为属性对待,常用的属性有单个属性和组合属性,单值属性和多值属性以及派生属性。 将不同实体型的实体集之间的联系称为联系把参与联系的实体型的数目称为联系的度,常用的联系有1对1、1对多、多对多。 在开发一个大型信息系统时,最经常采用的策略是自顶向下地进行
需求分析,然后再自底向上地设计概念结构。即首先设计各子系统的分E-R图,然后通过合并、修改与重构将它们集成起来,得到全局E-R图。在各子系统进行合并时将涉及到E-R图之间的冲突,主要有三种类型的冲突:属性冲突:属性域冲突、属性取值单位冲突;命名冲突:同名异义、异名同义;结构冲突:同一对象在不同应用中具有不同的抽象、同一实体在不同子系统的E-R图中所包含的属性个数和属性排列次序不完全相同、实体间的联系在不同的E-R图中为不同的类型。修改与重构主要是为了消除冗余的数据以及实体间联系的冗余。 五、实验目的: 熟练掌握局部E-R图和全局E-R图的建立方法,熟练掌握概念模型向数据模型(关系模式)的转化 六、实验内容: 根据所选题目汽车销售管理系统需求分析内容,进行局部概念模型分析与设计,然后进行全局概念模型设计。 七、实验器材(设备、元器件):计算机、Microsoft Visio2013软件 八、实验步骤: 1、对需求分析阶段收集到的数据进行分类、组织,确定实体、实体的属性、实体之间的联系类型,形成E-R图。 2、合并E-R图,生成初步E-R图。 3、消除不必要的冗余,设计基本E-R图。
线性二自由度汽车操纵稳定性Simulink仿真
线性二自由度汽车操纵稳定性Simulink 仿真 汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能够遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且遇到外界干扰时,汽车能够抵抗干扰而保持稳定行驶的能力,汽车的操纵稳定性是汽车主动安全性的重要评价指标之一。 操纵稳定性包括:汽车在转向盘输入或外界干扰输入下的侧向运动响应随时间而变化的特性称为时域响应特性;转向盘输入有角位移输入和力矩输入;外界干扰输入主要指侧向风和路面不平产生的侧向力。 1. 转向盘角阶跃输入下的响应 稳态响应,评价参量为 横摆角度速度增益—转向灵敏度 瞬态响应,评价参量为 反应时间;横摆角速度波动的无阻尼园频率。 2. 横摆角速度频率响应特性 转向盘转角正弦输入下,频率由0至∞变化时,汽车横摆角速度与转向盘转角的振幅比及相位差的变化规律。评价参量为:共振峰频率;共振时的振幅比;相位滞后角;稳态增益。 3. 转向盘中间位置操纵稳定性 转向盘小转角、低频正弦输入下,汽车高速行驶时的操纵稳定性。评价参量为:转向灵敏度、转向盘力特性、转向功灵敏度。 4. 回正性 转向盘力输入下的时域响应。评价参量为:回正后剩余横摆角速度与剩余横摆角;达到剩余横摆角速度的时间。 轮胎的侧偏特性为:αk F Y =,k 为侧偏刚度,Y F 一定时,侧偏角越小越好,因此k 越大越好;前轮侧偏角在4度内时,轮胎侧偏特性呈线性变化。 图1 线性二自由度汽车模型对前轮角输入的响应 建模假设:忽略转向系统的影响,直接以前轮转角为输入;忽略悬架的作用,车身仅作平行于地面的平面运动,绕z 轴的位移、绕y 轴的俯仰角和绕x 轴的侧倾角均为零;汽车前进速度不变。汽车被简化为只有侧向和横摆两个自由度的两轮汽车模型。
二自由度PID控制系统设计
二自由度PID控制系统设计与研究 孙维(安庆师范学院物理与电气工程学院安徽安庆246011) 指导老师:杨伟 摘要:传统的PID控制是一自由度的PID控制,只能对系统的一个控制参数进行设定,所以很难在实际控制中得到理想的控制效果。而二自由度PID控制系统可以独立设定两个控制参数,使系统的设定值跟踪效果和抑制干扰的效果同时达到最优。本文首先对二自由度PID控制方式做以介绍。其次,根据事先选定的被控对象的传递函数对被控系统加以分析,建立被控对象频域特性的二阶系统模型,对控制参数加以整定。再次,根据对几种控制方式的控制效果的比较,做出二自由度PID控制方式的选择。最后通过Matlab软件进行仿真,并对结果加以分析。 关键词:二自由度PID控制,设定值跟踪,干扰抑制 一、引言 PID控制方式在工业控制过程中是最常见的方式。但传统的PID控制器,无法做到既可以跟踪设定值又可以抑制各种外界干扰。原因在于传统PID控制只可以设定一个PID控制参数,即一自由度PID 控制器。在这种控制方法中,PID控制参数的整定只可以是将目标值跟踪特性和抑制外界干扰特性的折中的处理方法。 二自由度的PID控制方式是在传统的PID控制中想办法整定两套能独立整定的PID控制参数,从而使被控制系统的目标值跟踪特性和外界干扰抑制特性可以同时达到最佳的控制效果的控制方式。基于这种理论的基础之上,人们发展了很多智能型的PID控制器,比如专家型的PID控制器、神经网络PID 控制器、基于遗传算法PID控制器等等。本文采用专家型的二自由度PID控制器来提升被控制系统的控制效果。 二、二自由度的PID控制方式及其选择 2.1控制方式介绍 2.1.1前馈型PID控制方式(专家式) 目前实际应用中的二自由度PID控制方式包括前馈型和滤波型两种。当控制系统中的被控对象参数发生变化时,利用人工改变相应PID控制参数及二自由度化系数是比较繁琐的。为了克服这一问题人们设计了一种前馈型的二自由度PID控制方式,即专家式自动整定调节器。 前馈型PID调节器再根据阶跃响应法辨识出被控制对象G(s)的大致参数后依据整定公式求出使干扰抑制特性达到最佳的PID控制参数值,然后依据系统的参数以及为满足系统不同控制品质要求而设定的超调量δ的大小,查找出比例尺增益二自由度化系数α的值、积分时间二自由度化系数β矩阵表,得到相对应的α、β值,使系统响应趋于控制效果最佳的设定目标。在本文中将采用滤波型二自由度PID 控制方式的结构设计控制器。所以重点研究滤波型二自由度PID控制方式的结构特点。 2.1.2设定值滤波型控制
2.1 制作简单汽车模型 教学设计
北京昌平职业学校汽车系 制作简单汽车模型 教学设计 Beijing ChangPing V ocational School Automobiles Application and Maintenance.(CPVS-AAM) 第 1 页 共 17 页 目 录 一、教学设计 课程名称 汽车机械基础 教学时间 90课时 学习单元 制作简单汽车模型 教学时间 45课时 学习目标(细化) 1、学生通过与顾客沟通,掌握与顾客沟通的技巧; 2、学生根据顾客的描述,确认顾客委托任务; 3、学生通过查找资料收集相关信息,制定出制作简单汽车模型的工作计划; 4、学生能够初步掌握常用工具、量具的操作方法与技能以及维护保养知识; 5、能正确解释汽车常用金属材料牌号的意义,知道汽车常用材料机械性能和适宜采用的工艺方法;能解释汽车零件的材料性能、牌号及加工的方法。
北京昌平职业学校汽车系 制作简单汽车模型 教学设计 Beijing ChangPing V ocational School Automobiles Application and Maintenance.(CPVS-AAM) 第 2 页 共 17 页 6、学生能够掌握识读汽车基本的零件图和简单装配图、各种结构、工作示意图,对图的理解正确,并能说明结构、工作示意图所表达的意思。 7、学生能够掌握钳工基础知识,钳工工艺加工的编程;钳工工艺基础理论知识; 8、合理选择和正确使用改锥及各类扳手等常用通用工具; 合理选择和正确使用外径千分尺、游标卡尺、百分表等通用量具,测量结果准确。 9、让学生在实践中培养安全和维护质量意识,并且认真履行工作安全和环境保护的规定; 10、 学生对工作结果进行记录并对结果加以分析总结; 11、 学生要对实习设备工具、车辆、仪器、环境、人身安全认真负责; 12、 通过小组学习培养团队协作意识; 13、 与顾客,上级和同事进行沟通并对工作情况进行说明; 14、 提升环保和节约意识,对可重复利用材料合理使用; 15、 严格遵守用电安全、生产条例,规范操作 工作任务 工作过程导向 教学突破点 教学设备设施要求 情境模拟:机修工人从销售商处接受制作金属汽车模型的任务,加工后成品收购进行销售。 利用计算机设计零件图; 正确选择汽车模型部件金属材料; 零件加工尺寸、加工余量 金属零件钳工加工 简单金属汽车模型装配 汽车维修钳工基本工具: 划线:划针、划线盘、高度游标卡尺、划规、样冲。 锉刀、手锯、
汽车模型制作
签: 杂谈 汽车模型制作 传统的汽车车身设计过程是基于手工设计完成的,其特点是整个过程通过实物、模型、图样、样板等来传递信息,至少进行1:5油泥模型、全尺寸油泥模型和样车制作等阶段;还要利用1:5油泥模型、1:1全尺寸油泥模型以及实车进行三次风洞试验,考察其外形的空气动力学性能。随着计算机技术的发展,高速图形终端和工作站的出现,使CAD/CAE/CAM等现代设计方法得以应用于车身设计中。这种方法的一个主要工作是利用计算机辅助几何设计(CAGD)方法来进行车身几何造型设计,即在计算机上建立一个车身表面模型,以部分取代传统设计中的三维实体模型。但是,即便是采用以计算机辅助的现代车身设计方法,在一个车型的开发过程中也不能完全没有实体模型的制作,只是为了缩短开发时问和降低开发成本,用计算机的数学模型替代一部分实体模型。 目前,较为常见的汽车造型设计流程中,汽车模型制作(尤其是油泥模型制作)是不可或缺的重要一环。汽车模型制作是将汽车平面草图立体化的过程。它提供了一个立体的汽车形态,在此基础上确定方案或进一步推敲外形的优缺点就比较容易了。 在模型制作阶段有很多的制作方式可供选择,而将油泥模型作为首选,是由汽车造型设计的特殊性和油泥本身具有的特点所决定的。首先,汽车外形相对复杂,它由许多光滑的曲面组合而成,这就要求一种可以灵活生成各种曲面的制作方法。相对于其他方法,油泥可以方便地被刮切成任意的形态,非常适合表现汽车曲面制作。其次,汽车外形设计不可避免地有许多反复的过程,要对模型作反复的推敲修改,这需要模型本身具有重复可塑性。油泥模型的特点恰好符合这样的要求:①与普通材料不同,油泥经过加温,其硬度会迅速降低,得到相当好的柔软性,特别适合重塑;②温度回落,其硬度又很快恢复,适合对细节的刻画; ③这个过程还可以多次反复,丝毫不影响油泥本身的质量。再次,汽车外形设计对表面质感的光滑要求极高,一些普通材料的表面无法满足要求,而油泥的质感细腻光滑,符合近乎严酷的表面要求。从制作时间上来看,油泥模型也是比较快捷的一种。因此,它自然地成为目前汽车造型设计模型制作的主要手段。 当然,近年来计算机辅助设计发展迅速,尤其是新开发的虚拟现实技术也给实体油泥模型制作的必要性带来了疑问 油泥是一种价钱跟巧克力一样的汽车模型专用材料。一般的比例模型用建筑油泥就可以了,其他规格的相对价格太高,只有企业里或者极其专业的汽车设计公司才会舍得用。油泥材料有轻微毒性,并且有比较明显的味道,如果在油泥模型室里面待几个小时,味道会渗透到衣物当中,很难散掉,所以出于各种考虑,制作油泥模型的人通常都会穿着工作装。它是一种人造材料。凝固后极软,较软,坚硬。油泥可塑性强,黏性、韧性比黄泥(黏土模型)强。它在塑造时使用方便,成型过程中可随意雕塑、修整,成型后不易干裂,可反复使用。油泥价格较高,易于携带,制作一些小巧、异型和曲面较多的造型更为合适。一般像车类、船类造型用油泥极为方便。所以选用褐油泥作为油泥的最外层是很明智的选择。油泥的材料主要成分有滑石粉62%,凡士林30%,工业用蜡8%。 新买来的油泥质感跟巧克力差不多,这样的油泥暂时是不能使用的,它需要烤箱加热,达到一定柔软程度才行。油泥除了贵还很沉,一个1:4的比例模型,需要三到四个体力好的男性才能勉强抬动。 早期的汽车车身模型多用石膏和木板为材料,木质模型特点是变形小、不易破损、可长期保存。石膏较便宜,但强度较低,而且不便于反复修改。1955年日本首次使用工业油泥进行汽车模型的设计开发。1972年美国通用汽车公司将油泥应用到汽车设计开发模型上,使汽车设计摆脱了受限于呆板的石膏、木板的历史。我国是在70年代初开始应用这一技术。