七自由度整车模型及参数
七自由度整车模型及参数
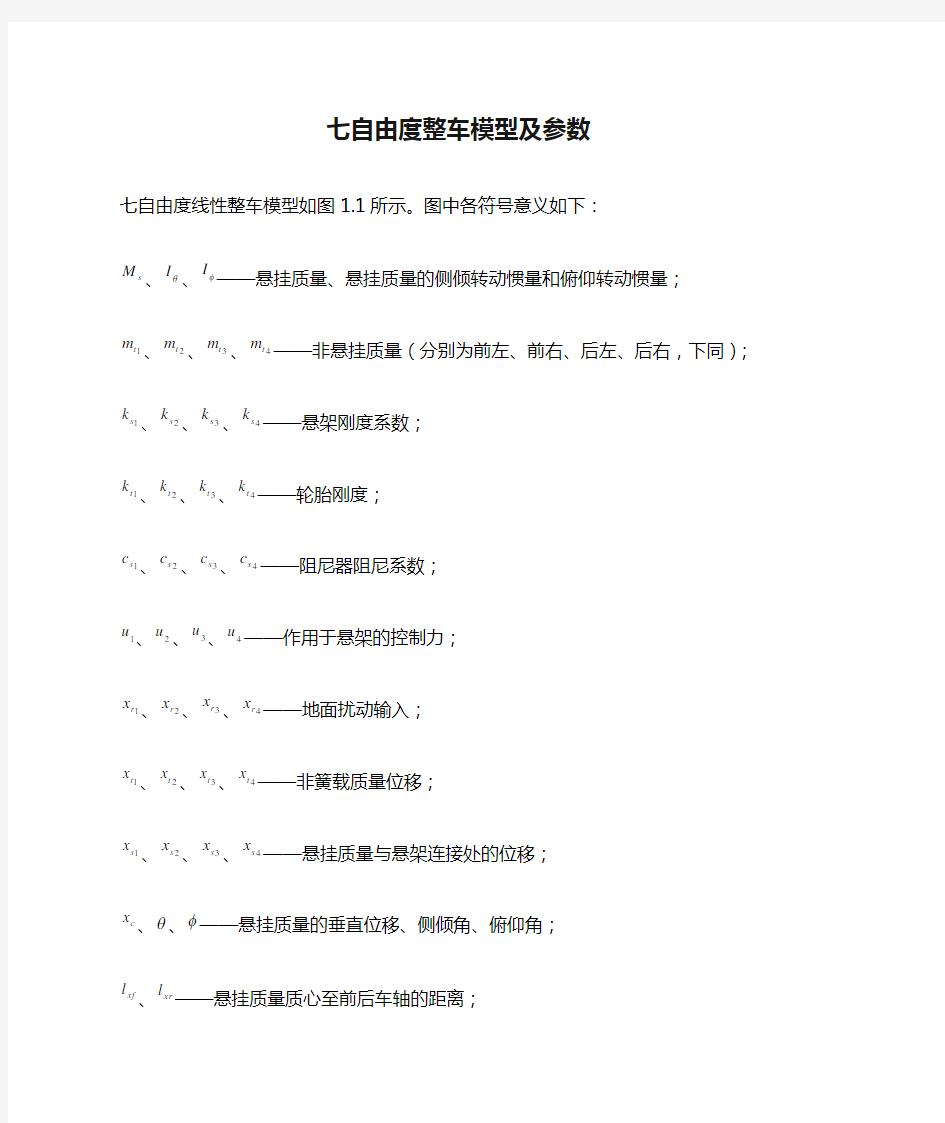
七自由度线性整车模型如图1.1所示。图中各符号意义如下: s M 、θI 、φI ——悬挂质量、悬挂质量的侧倾转动惯量和俯仰转动惯量; 1t m 、2t m 、3t m 、4t m ——非悬挂质量(分别为前左、前右、后左、后右,下同); 1s k 、2s k 、3s k 、4s k ——悬架刚度系数;
1t k 、2t k 、3t k 、4t k ——轮胎刚度;
1s c 、2s c 、3s c 、4s c ——阻尼器阻尼系数;
1u 、2u 、3u 、4u ——作用于悬架的控制力;
1r x 、2r x 、3r x 、4r x ——地面扰动输入;
1t x 、2t x 、3t x 、4t x ——非簧载质量位移;
1s x 、2s x 、3s x 、4s x ——悬挂质量与悬架连接处的位移;
c x 、θ、φ——悬挂质量的垂直位移、侧倾角、俯仰角;
xf l 、xr l ——悬挂质量质心至前后车轴的距离;
ylf l 、ylr l ——前后悬挂质量质心至左轮的距离。
图1.1 七自由度整车模型
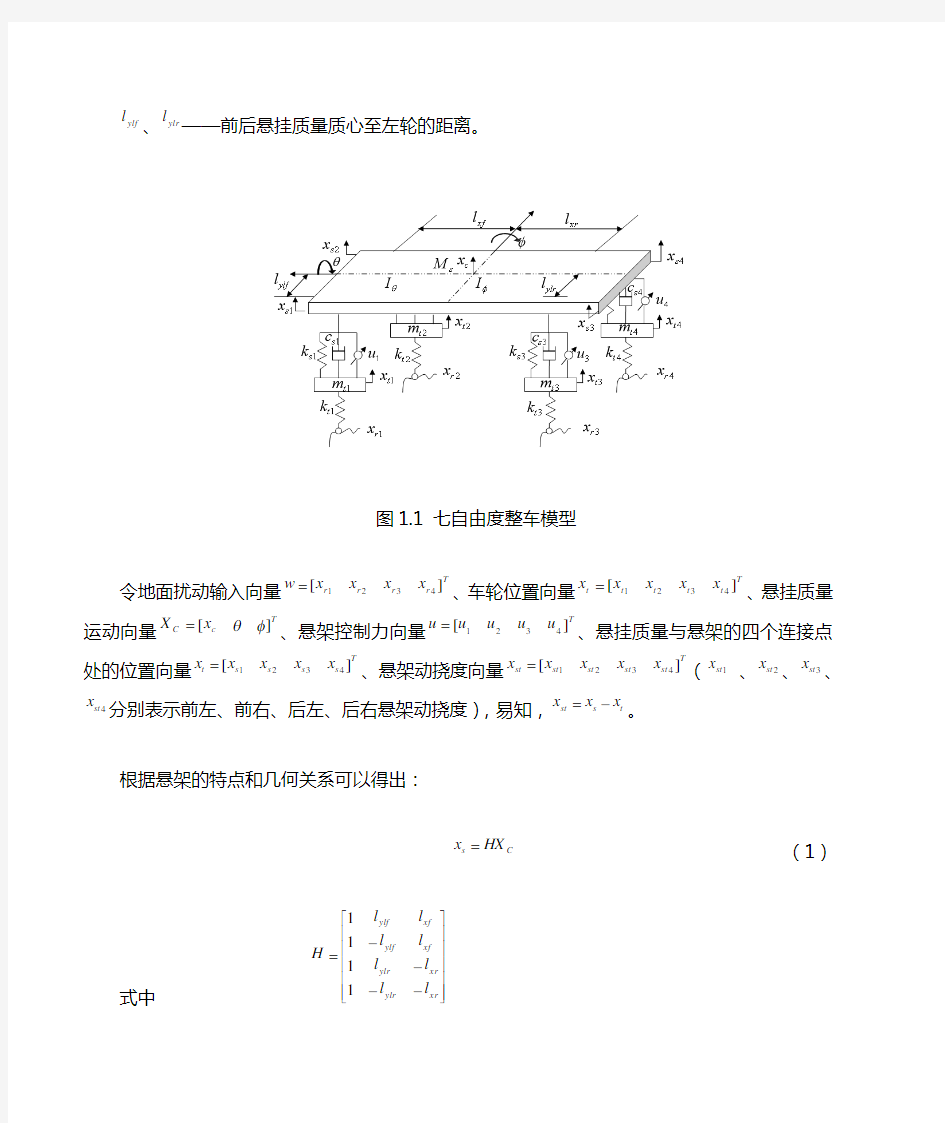
令地面扰动输入向量T r r r r x x x x w ][4321
=、车轮位置向量T t t t t t x x x x x ][4321
=、悬挂质量运动向量T c C x X ][φθ=、悬架控制力向量T u u u u u ][4321
=、悬挂质量与悬架的四个连接点处的位置向量T s s s s t x x x x x ][4321=、悬架动挠度向量T st st st st st x x x x x ][4321=(1st x 、2st x 、3st x 、4st x 分别表示前左、前右、后左、后右悬架动挠度),易知,t s st x x x -=。 根据悬架的特点和几何关系可以得出:
C s HX x = (1)
式中 ??????
????????----=xr ylr xr ylr xf ylf xf ylf l l l l l l l l H 1111 根据牛顿第二定律,系统总的运动方程可表示为:
)()()()()(w x K u x X H C x HX K x M u H x X H C H x HX K H X M t
t t C S t C s t t T t C S T t C s T C b ----+-=+----= (2) 式中
),,(φθI I M diag M s b =,),,,(4321s s s s s k k k k diag K =,),,,(4321s s s s s c c c c diag C =,),,,(4321t t t t t m m m m diag M =,),,,(4321t t t t t k k k k diag K =
令[]T t C x X x
=?则上述运动微分方程可以表示为: u E w E x K x D x
M 21???+=++ (3) 式中
??????=t b M M M ,??
????+--=t s s s T s T K K H K K H H K H K ,??????--=s s s T s T C H C C H H C H D ,??????=t K E 01,??
????-=I H E T 2 选取状态向量[]
T x x x ??~= ,则式(3.5)的状态空间形式为: u B w B x A x 21~~~~~++= (4) 式中 ??????--=--D M K
M I A 110~,??????=-1110~E M B ,??????=-2120~E M B
详细步骤MATLAB车辆两自由度操纵稳定性模型分析
基于MATLAB的车辆两自由度操纵稳定性模型及分析 汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。 车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。 1二自由度汽车模 为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2 运动学分析 确定汽车质心的(绝对)加速度在车辆坐标系的分量 和。Ox 与Oy 为车辆坐标系的纵轴与横轴。质心速度 与t 时刻在Ox 轴上 的分量为u ,在oy 轴上的分量为v 。 2.1 沿Ox 轴速度分量的变化为: ()()cos sin cos cos sin sin u u u v v u u u v v θθ θθθθ+??--+??=?+??---?? 考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便 是汽车质心绝对加速度在车辆坐标系。
沿Ox 轴速度分量的变化为: u x r d d v u v dt dt a θω=-=- 同理,汽车质心绝对加速度沿横轴oy 上的分量为:y r v u a ω=+ 2.2 二自由度动力学方程 二自由度汽车受到的外力沿y 轴方向的合力与绕质心的力矩和为: 12 12cos a cos Y Y Y Z Y Y b F F F M F F δδ=+=-∑∑ 式中,,为地面对前后轮的侧向反作用力;为前轮转角。 考虑到很小,上式可以写上: 11221122 a Y Z b k k F k k M αα αα=+=-∑∑ 根据坐标系的规定,前后侧偏角为: ()12r r r a u v b b u u δξβδβωαωωα=--=+ --==- 由此,可以列出外力,外力矩与汽车参数的关系式为: 1212r r Y r r Z a b u u a b a b u u k k F k k M βδββδβωωωω????=+-+- ? ?????????=+--- ? ????? ∑∑ 所以,二自由度汽车的运动微分方程为: ()1212r r r r r z r a b m v u u u a b a b u u k k k k I βδββδβωωωωωω????+-+-=+ ? ?????????+---= ? ???? ? 上式可以变形为:
七自由度车辆图和数学模型
图一.七自由度车辆动力学模型
纵向力平衡方程: 121234 ()()cos ()sin x y x x y y x x m V r V F F F F F F δδ? -?=+-+++侧向力平衡方程: 121234 ()()sin ()cos y x x x y y y y m V r V F F F F F F δδ? +?=+++++绕Z 轴力矩平衡方程: 1 121221122 4334[()sin ()cos ][()cos ()sin ] 2 ()()2 w z x x y y x x y y w x x y y t I r F F F F a F F F F t F F F F b δδδδ? ?=++++-+-+--+四个车轮的力矩平衡方程: tw w xi bi di I R F T T i w ? ?=-?-+ 上述方程中:δ为前轮转角;Vx ,Vy 分别为纵向、横向车速;β为质心侧偏角;γ为横摆角速度;Fxi 、Fyi 、Fzi 分别为轮胎纵向力、侧向力、垂向力;i=1、2、3、4,为分别对应的车轮;m 为整车质量;ms 为悬挂质量;a 、b 为前后轴到质 心的距离;l=a+b 为前后轴距;tw1为前轴轮距;tw2为后轴轮距;d= 12 2 tw tw +为 平均轮距;Iz 为整车绕Z 轴的转动惯量;h 为质心到地面的距离; 纵向加速度为x x y a V r V ? =-? 侧向加速度为 y y x a V r V ? =+?
各轮胎垂向载荷公式: 123422222222z s x s y z s x s y z s x s y z s x s y b h h b F mg m a m a l l d l b h h b F mg m a m a l l d l a h h a F mg m a m a l l d l a h h a F mg m a m a l l d l =--? =-+? =+-? =++? 各轮胎侧偏角公式: 1 1 2 2 12223242arctan()arctan()arctan()arctan()w w w w t t t t Vy ar Vx r Vy ar Vx r Vy br Vx r Vy br Vx r αδαδαα+=--+=-+-=---=-+
线性二自由度汽车模型的运动微分方程
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且 l r Z Z F F ; (3)汽车前进速度u 视为不变; (4)侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用。 在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 与 为车辆坐标系的纵轴和横轴。质心速度 于时刻在 轴上的分量为 ,在 轴上的分量为 。由于汽车转向行驶时伴有平移和转动,在时刻,车辆坐标系中质心速度的大小与方向均发生变 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿 轴速度分量变化为:
考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量 同理得: 下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成:
下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成: 汽车前后轮侧偏角与其运动参数有关。如上图所示,汽车前后轴中点的速度为,;前后轮侧偏角为, ;质心侧偏角为,;为与轴的夹角,其值为:
线性二自由度汽车模型的运动微分方程
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z轴的位移、绕y轴的俯仰角和绕x轴的侧倾角均为零,且F Zr Fzi ; (3)汽车前进速度u视为不变; (4)侧向加速度限定在0.4g —下,确保轮胎侧偏特性处于线性围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 閒代后护曲轮汽车枠即及车辆咐标丟 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 "T与W为车辆坐标系的纵轴和横轴。质心速度V l于f时刻在轴上的分量为|/<,在°匸轴上的分量为 卜。由于汽车转向行驶时伴有平移和转动,在'时刻,车辆坐标系中质心速度的大小与方向均发生变 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿'■轴速度分量变化为: (? + Av)sin A" =u cos A6? + cos A 0 it -vsin 0 Avsin \0 考虑到△ 6很小并忽略二阶微量,上式变成:\u -K A0
除以Ar并取极限,便是汽车质心绝对加速度在车辆坐标系\ox上的分量 du dO * a -- ----- v——= n-va) x dt dt r 同理得:叭"刊叫 下面计算二自由度汽车的动力学方程 < ------------------------------ --------------------------------------- ih 二自由度汽车受到的外力沿匸"|轴方向的合力与绕质心的力矩和为 》禺=洛心方"二11 式中,如,比为地面对前后轮的侧向反作用力,即侧偏力;/为前轮转角考虑到’很小,上式可以写成:
线性二自由度汽车模型的运动方程
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且 l r Z Z F F ; (3)汽车前进速度u 视为不变; (4)侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用。 在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 与 为车辆坐标系的纵轴和横轴。质心速度 于时刻在 轴上的分量为 ,在 轴上的分量为 。由于汽车转向行驶时伴有平移和转动,在时刻,车辆坐标系中质心速度的大小与方向均发生变 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿 轴速度分量变化为:
考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量 同理得: 下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成:
下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成: 汽车前后轮侧偏角与其运动参数有关。如上图所示,汽车前后轴中点的速度为,;前后轮侧偏角为,;质心侧偏角为,;为与轴的夹角,其值为:
线性二自由度汽车操纵稳定性Simulink仿真
线性二自由度汽车操纵稳定性Simulink 仿真 汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能够遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且遇到外界干扰时,汽车能够抵抗干扰而保持稳定行驶的能力,汽车的操纵稳定性是汽车主动安全性的重要评价指标之一。 操纵稳定性包括:汽车在转向盘输入或外界干扰输入下的侧向运动响应随时间而变化的特性称为时域响应特性;转向盘输入有角位移输入和力矩输入;外界干扰输入主要指侧向风和路面不平产生的侧向力。 1. 转向盘角阶跃输入下的响应 稳态响应,评价参量为 横摆角度速度增益—转向灵敏度 瞬态响应,评价参量为 反应时间;横摆角速度波动的无阻尼园频率。 2. 横摆角速度频率响应特性 转向盘转角正弦输入下,频率由0至∞变化时,汽车横摆角速度与转向盘转角的振幅比及相位差的变化规律。评价参量为:共振峰频率;共振时的振幅比;相位滞后角;稳态增益。 3. 转向盘中间位置操纵稳定性 转向盘小转角、低频正弦输入下,汽车高速行驶时的操纵稳定性。评价参量为:转向灵敏度、转向盘力特性、转向功灵敏度。 4. 回正性 转向盘力输入下的时域响应。评价参量为:回正后剩余横摆角速度与剩余横摆角;达到剩余横摆角速度的时间。 轮胎的侧偏特性为:αk F Y =,k 为侧偏刚度,Y F 一定时,侧偏角越小越好,因此k 越大越好;前轮侧偏角在4度内时,轮胎侧偏特性呈线性变化。 图1 线性二自由度汽车模型对前轮角输入的响应 建模假设:忽略转向系统的影响,直接以前轮转角为输入;忽略悬架的作用,车身仅作平行于地面的平面运动,绕z 轴的位移、绕y 轴的俯仰角和绕x 轴的侧倾角均为零;汽车前进速度不变。汽车被简化为只有侧向和横摆两个自由度的两轮汽车模型。
车辆系统动力学-复习提纲
1. 简要给出完整约束与非完整约束的概念2-23,24,25, 1)、约束与约束方程 一般的力学系统在运动时都会受到某些几何或运动学特性的限制,这些构成限制条件的具体物体称为约束,用数学方程所表示的约束关系称为约束方程。 2)、完整约束与非完整约束 如果约束方程只是系统位形及时间的解析方程,则这种约束称为完整约束。 完整约束方程的一般形式为: 式中,qi为描述系统位形的广义坐标(i=1,2,…,n);n为广义坐标个数;m为完整约束方程个数;t为时间。 如果约束方程是不可积分的微分方程,这种约束就称为非完整约束。 一阶非完整约束方程的一般形式为:
式中,qi为描述系统位形的广义坐(i = 1, 2, …,n);为广义坐标对时间的一阶与数;n为广义坐标个数;m为系统中非完整约束方程个数;t为时间。 2. 解释滑动率的概念3-7,8 1.滑动率S 车轮滑动率表示车轮相对于纯滚动(或纯滑动)状态的偏离程度,是影响轮胎产生纵向力的一个重要因素。 为了使其总为正值,可将驱动和被驱动两种情况分开考虑。驱动工况时称为滑转率;被驱动(包括制动,常以下标b以示区别)时称为滑移率,二者统称为车轮的滑动率。
参照图3-2,若车轮的滚动半径为rd,轮心前进速度(等于车辆行驶速度)为uw,车轮角速度为ω,则车轮滑动率s定义如下: 车轮的滑动率数值在0~1之间变化。当车轮作纯滚动时,即uw=rd ω,此时s=0;当被驱动轮处于纯滑动状态时,s=1。 3. 轮胎模型中表达的输入量和输出量有哪些?3-22,23 轮胎模型描述了轮胎六分力与车轮运动参数之间的数学关系,即轮胎在特定工作条件下的输入和输出之间的关系,如图3-7所示。 根据车辆动力学研究内容的不同,轮胎模型可分为:
七自由度整车模型及参数
七自由度整车模型及参数 七自由度线性整车模型如图1.1所示。图中各符号意义如下: s M 、θI 、φI ——悬挂质量、悬挂质量的侧倾转动惯量和俯仰转动惯量; 1t m 、2t m 、3t m 、4t m ——非悬挂质量(分别为前左、前右、后左、后右,下同); 1s k 、2s k 、3s k 、4s k ——悬架刚度系数; 1t k 、2t k 、3t k 、4t k ——轮胎刚度; 1s c 、2s c 、3s c 、4s c ——阻尼器阻尼系数; 1u 、2u 、3u 、4u ——作用于悬架的控制力; 1r x 、2r x 、3r x 、4r x ——地面扰动输入; 1t x 、2t x 、3t x 、4t x ——非簧载质量位移; 1s x 、2s x 、3s x 、4s x ——悬挂质量与悬架连接处的位移; c x 、θ、φ——悬挂质量的垂直位移、侧倾角、俯仰角; xf l 、xr l ——悬挂质量质心至前后车轴的距离; ylf l 、ylr l ——前后悬挂质量质心至左轮的距离。 图1.1 七自由度整车模型 令地面扰动输入向量T r r r r x x x x w ][4321 =、车轮位置向量T t t t t t x x x x x ][4321 =、悬挂质量运动向量T c C x X ][φθ=、悬架控制力向量T u u u u u ][4321 =、悬挂质量与悬架的四个连接点处的位置向量T s s s s t x x x x x ][4321=、悬架动挠度向量T st st st st st x x x x x ][4321=(1st x 、2st x 、3st x 、4st x 分别表示前左、前右、后左、后右悬架动挠度),易知,t s st x x x -=。 根据悬架的特点和几何关系可以得出: C s HX x = (1)
汽车五自由度建模
汽车振动大作业
、汽车悬架系统振动模型 汽车是一个复杂的振动系统,在振动分析的建模过程当中,要根据所分析的问题对汽车 进行简化,建立相应的模型。现在考虑汽车车身悬架的五自由度模型,如下图1所示,该模型主要考虑左右车辙的不平度差异和较小的轮胎阻尼而得到的,该模型中主要有车身的垂 直、俯仰两个自由度和前后车轴质量两个垂直自由度,汽车座椅一个垂直自由度,系统共五 个自由度,其中车身质量的垂直、俯仰两个自由度的振动对系统平顺性的影响较大,假设车身是具有垂直和俯仰两个自由度的刚体,其车身的质量和转动惯量分别为:m h和I h,前后车轮质量、悬架参数和轮胎刚度的符合前加入了分别表示前(front)和后(rear)的下标“ f”和“r”,如图1示: 图1五自由度汽车悬架系统 图1中:z1表示前轮转动位移自由度;z2表示车体垂直位移自由度;z3 z1表示后轮转动位移自由度;z4俯仰转动位移自由度;z5表示驾驶员座椅垂向自由度;m1表示驾驶员座椅质量;m2表示车体质量;m( f) m3表示前轮质量;m(r) m4表示后轮质量;k1表 示座椅弹簧刚度;k2,k3,k4,k5悬架弹簧刚度;c1表示座椅弹簧阻尼;c2,c3, c4, c5表示悬架弹簧阻尼;a表示车身质心至前轴距离;b车身质心至后轴距离,F(f), F(r)分别为前 后轮随机激励力。
、运动微分方程 d ( T) ( T) dt z z 可得到多自由度的运动微分方程: V —F Qi 0 (i 1,2, ,5) 乙 Mz(t) Cz(t) Kz(t) F(t) 式中: m i 0 0 0 0 0 m 2 0 0 0 M 0 0 m 3 0 0 0 0 0 0 0 0 0 0 m 5 C 1 C 1 dG Ci C 1 C 2 C 3 dCi ac 2 bC 3 C 2 C 3 C dC 1 dCi ac 2 bC 3 d 2G 2 .2 a C 2 b C 3 aC 2 bC 3 0 C 2 ac 2 C 3 C 4 0 C 3 bC 3 C 3 C T 1m 1z 12 1 2 m 2z 2 1 2 m 4z 4 1 2 m )5Z 5 1 5 2 -m i z (m 3 I) 2 2 2 2 2 2 i 1 由图1可得到下述理论值: (1)系统的动能为: (2)系统的势能为: (1-2) 1 2 1 2 2kl(z2 Z1 dZ3)尹⑵ Z2 az3) fk 3(Z 5 Z 2 bz 3)2 1 2 1 2 gk 4( Z 4 F(f))2 2k s (Z 5 F(r))2 (1-3) C G (Z 2 Z 1 dz 3)(GZ 2 GN dGZ 3) C 2(Z 4 Z 2 bZ 3)(C 2 Z 4 C 2Z 2 dC 2 Z 3) C s (Z 5 Z 2 bZ 3)(C 3Z 5 C 3Z 2 bQZ 3) C 4(Z 5 F (f))C 4 乙 C 5(Z 5 F (r))C 5Z 5 ⑶ 系统阻尼耗散的能量: 由拉格朗日运动方程: (1-4)
汽车2自由度和7自由度动力学建模仿真#精选.
1 路面模型的建立 在分析主动悬架控制过程时,路面输入是一个不可忽略的重要因素,本文利用白噪声信号为路面输入激励, )(2)(2)(0 00t w U G t x f t x g g ππ+-=? 其中,0f 为下截止频率,Hz ;G 0为路面不平度系数,m 3/cycle ;U 0为前进车速,m/sec ;w 为均值为零的随机输入单位白噪声。上式表明,路面位移可以表示为一随机滤波白噪声信号。这种表示方式来源于试验所测得的路面不平度功率谱密度(PSD )曲线的形状。我们可以将路面输入以状态方程的形式加到模型中: ???? ?=+=? X C Y W F X A X road road road road road 1,2,2,000==-==road road road g road C U G B f A x X ππ;D=0;考虑路面为普通路面,路面不平系数G 0=5e-6m 3/cycle ;车速U 0=20m/s ;建模中,路面随机白噪声可以用随机数产生(Random Number )或者有限带宽白噪声(Band-Limited White Noise )来生成。本文运用带宽白噪声生成,运用MATLAB/simulink 建立仿真模型如下: 图1 路面模型 2 汽车2自由度系统建模 图2 汽车2自由度系统模型
根据图2所示,汽车2自由度系统模型,首先建立运动微分方程: ()()()()()b b s b w s b w w w t w g s b w s b w m x K x x C x x m x K x x K x x C x x =----???=--+-+-?? 整理得: ?????? ?+--+-+-+-=-+-+-+-=g w t b w t s b w s b w s b w s w b b s b b s w b s b s b x m K x m K K x m K x m C x m C x x m K x m K x m C xb m C x 式中:s C 为悬架阻尼,s K 为悬架刚度,t K 为轮胎刚度,b m 为车身质量,w m 为 车轮质量,b b b x x x 、、分别为车身位移、速度、加速度,w w w x x x 、、分别为车轮位移、速度、加速度,g x 为路面输入。 选取状态变量和输入向量为: []w b w b x x x x X = g x U = 则可将系统运动方程及路面激励写成状态空间矩阵形式,即: BU AX X += 其中,A 为状态矩阵,B 为输入矩阵,其值如下: ?????? ?? ? ?????????---- -=00 1 0001w s s w s w s w s b s b s b s b s m K K m K m C m C m K m K m C m C A ???? ??????????=000w t m K B 将车身加速度、轮胎动变形、悬架动行程作为性能指标,即: T w b g w b x x x x x Y ][--= 将性能指标项写为状态变量以及输入信号的线性组合形式,即: DU CX Y += 其中:
基于simulink的线性二自由度汽车模型稳态响应
基于simulink的线性二自由度汽车模型稳态响应 1.项目背景 进行控制器的设计以及验证控制器是否正确的必要前提在于建立一个正确 且可靠的整车数学模型。如果能够建立同实际车辆更加接近的整车虚拟样机模型就能更好的反映车辆响应特性以及控制效果。因此本实验将会在一定的假设条件之下,基于汽车理论以及牛顿力学在MATLAB/Simulink的环境下将整车动力学数学模型建立出来,在此基础上求前轮角输入下的响应曲线。 2.二自由度车辆模型 如果要准确的对车辆的动力学状态进行描述,则需要知道车辆的上百个参数,譬如轮胎半径、前后轮的侧偏刚度等,但这当中有许多的参数是不变的,而有些却在车辆的行驶过程中会不断地发生变化,我们难以知道所有的参数的精确值,有些参数甚至于是不可以被测得的。而且,车辆的动力学状态也受到外部的行驶环境的影响,譬如汽车和空气的相对运动所产生的空气阻力、地面坡度所产生的道路的阻力等都会对汽车的状态有明显的影响,然而这些力的大小方向都会实时发生变化,就算根据相关的经验公式也只能得到它们的估计值,不容易被直接地测出。除此之外,汽车的许多参数相互之间都存在耦合关系,某一个参数的改变也可能会导致其它的参数改变,譬如汽车横向速度以及纵向速度间的耦合关系、非线性的轮胎横向力和纵向力间的耦合关系。有的参数之间的耦合关系并不能够用准确的数学公式来表达,这会使得所创建的数学模型的精度受到严重的影响。显而易见,如果要建立一个能精确地描述汽车的运动状态的车辆数学模型很明显是不太可能的。 本实验根据实际情况的需要进行适当地简化后把多自由度的整车模型简化成为二自由度车辆动力学模型。在分析中,直接以前轮转角作为输入而忽略了转向系统的影响;也忽略了悬架的作用,认为汽车的车厢只作平行于地面的平面运动,汽车只有沿着y轴的侧向运动以及绕着z轴的横摆运动。在建立运动微分方程的时候还假设:不考虑地面切向力对轮胎侧偏特性的影响,也忽略左右车轮的轮胎由于载荷变化而引起的轮胎特性的变化以及轮胎回正力矩的作用。如下图1,它是一个有前后两个有侧向弹性的轮胎支承于地面、具有侧向及横摆运动的二
将车辆的二自由度模型用能控标准型状态方程来表示
将车辆的二自由度模型用能控标准型状态方程来表示 系统状态方程的表达式不是唯一的,可根据需要建立不同形式的状态方程,如能控标准型、能观标 准型、约当型等。 状态方程是一阶微分方程或一阶差分方程,便于采用数值解法。系 统内部的物理量都可用状态矢量的分量来表示。 dX(t)/dt=AX(t)+BU(t) Y(t)=CX(t)+DU(t) X(t0)=X0 模型参数: 简记为(A,B,C,D) 系统系数矩阵A ?(nxn 维) 系统输入矩阵B ?(nxm 维) 系统输出矩阵C ?(rxn 维) 直接传输矩阵D ?(rxm 维 下面为横向动力学模型1/2车辆模型, 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且 l r Z Z F F ; (3)汽车前进速度u 视为不变; (4)侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用。 在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
与为车辆坐标系的纵轴和横轴。质心速度于时刻在轴上的分量为,在轴上的分量为 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿轴速度分量变化为: 考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量 下面计算二自由度汽车的动力学方程
基于Simulink的车辆两自由度操纵稳定性模型
基于Simulink的车辆两自由度操纵稳定性模型汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。 车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。 1.二自由度汽车模型 为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自 由度的汽车模型,忽略转向系统的 影响,直接一前轮转角作为输入; 忽略悬架的作用,认为汽车车厢只 作用于地面的平面运动。
2.运动学分析 分析时,令车辆坐标系原点与汽车质心重合。首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 确定汽车质心的(绝对)加速度在车辆坐标系的分量B和B。Ox 与Oy 为车辆坐标系的纵轴与横轴。质心速度1与t 时刻在Ox 轴上的分量为u ,在Oy 轴上的分量为v 。 2.1 沿Ox 轴速度分量的变化为: 由于汽车转向行驶时伴有平移和转动,在t+△t 时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿x 轴速度分量变化为: ()cos ()sin cos cos sin sin u u u v v u u u v v θθ θθθθ+??--+??=?+??---??
汽车七自由度仿真
汽车平顺性仿真模拟 3080401174 姜波 摘要:利用振动理论,平顺性研究方法及计算机技术建立了汽车三维7自由度车辆振动模型,应用Matlab 开发了相应的车辆平顺性模拟程序。通过实验和单因素分析法对所建立的车辆振动模型的正确性及模拟计算机程序的有效性进行了验证。结果表明,计算机对分析和预测车辆平顺性是切实可行的。 关键词:车辆工程;平顺性;模拟计算。 引言 随着汽车工业的发展,如何改善汽车行驶平顺性,已经成为设计者十分关注的问题,汽车作为一个复杂的多自由度振动系统,定量分析和评价平顺性的关键在于建立理想的力学模型。因此,如何更好地建立汽车行驶平顺性模型,已经成为国内外学者研究汽车平顺性的关键问题。随着计算机技术和仿真技术的发展,建立多自由度的仿真模型已经成为可能,也为研究汽车行驶平顺性提供了有效途径。 在国内外汽车市场竞争日益激烈的今天,如何在汽车设计阶段就能对 汽车平顺性进行准确预测和评估,缩短设计周期,降低生产成本,已经成为在市场竞争中取胜的关键。为此,对汽车行驶平顺性进行了仿真同时对结果进行了分析。 主要研究内容 本文通过建立整震动的空间7自由度模型,对悬架进行平顺性仿真工作,具体可以分为以下几个部分: 1. 建立起空间七自由度的汽车振动数学模型。 2. 利用Matlab/Simulink 对悬架进行平顺性仿真。 3. 对论文的工作进行总结。 整车模型的建立及参数 七自由度线性整车模型如图1.1所示。图中各符号意义如下: s M 、θI 、φI ——悬挂质量、悬挂质量的侧倾转动惯量和俯仰转动惯量; 1t m 、2t m 、3t m 、4t m ——非悬挂质量(分别为前左、前右、后左、后右,下同);
汽车二自由度振动模型计算
建立系统的动力学方程 建立系统的动力学方程的方法:1、牛顿力学:牛顿第二定律;2、分析力学:拉格朗日方程。 以x 、θ为两个变量建立二自由度系统动力学方程;3、影响系数法-张量算法 1、 根据牛顿第二定律, 2、 拉格朗日方程, ()n ,.....2,1Q i ==??-??i q L q L dt d i i -------------拉格朗日第二类方程 V T L -=,称为拉氏函数,泛函; 势能函数:()n q q q V V ,.......,21=; 动能函数:()n q q q ,.......,T T 21=; 广义坐标()n i i ,.....2,1q =对应的非保守力:()n i ,.....2,1Q i = ()n i q L q L dt d i i ,.....2,10==??-?? -------------保守系统的拉氏方程 -------------------利用上诉拉氏方程求解-------------------------------------
q q 21T T M = ;q q 2 1V T K = )J (mx 21T 2 2 θ += ])l (x k )l -(x [k 2 1V 2 22211θθ++= 将L=T-V 代入拉氏方程可解的: 可见:与牛顿第二定律求得的结果一致。 M q +K q =Q;对保守系统Q=0; ()n i q k q m n j j i j ij ,.....2,1Q )(i 1 j ==+∑= M =( J 0m ) K=( 2 2 22 111 122112221l k l k l k l k l k l k k k +--+) q =(θx ) M q +K q =Q 和()n i q k q m n j j i j ij ,.....2,1Q )(i 1j ==+∑= 有明确的物理意义:弹性恢复力-Kq 、惯性力-M q 与保守力Q 平衡。如张量理论,j i j i k m 、可认为是张量的坐标,j i k 表示:使系统仅产生沿j q 坐标的单位位移时,沿i q 坐标必须施加的外力i Q ,或者说Q 的i 分量在q 的j 分量上的影响量的投影。 3、影响系数法-张量算法 !!!!!!!下面由张量分量投影计算理论直接求解-----------!!!!!!!! 设 m11 m12 * x” + k11 k12 * x m21 m22 θ” + k21 k22 θ k11:仅当x 动1单位时,x 向的作用力为k1*1+k2*1=k1+k2;