汽车七自由度仿真
汽车平顺性仿真模拟
3080401174 姜波
摘要:利用振动理论,平顺性研究方法及计算机技术建立了汽车三维7自由度车辆振动模型,应用Matlab 开发了相应的车辆平顺性模拟程序。通过实验和单因素分析法对所建立的车辆振动模型的正确性及模拟计算机程序的有效性进行了验证。结果表明,计算机对分析和预测车辆平顺性是切实可行的。
关键词:车辆工程;平顺性;模拟计算。
引言
随着汽车工业的发展,如何改善汽车行驶平顺性,已经成为设计者十分关注的问题,汽车作为一个复杂的多自由度振动系统,定量分析和评价平顺性的关键在于建立理想的力学模型。因此,如何更好地建立汽车行驶平顺性模型,已经成为国内外学者研究汽车平顺性的关键问题。随着计算机技术和仿真技术的发展,建立多自由度的仿真模型已经成为可能,也为研究汽车行驶平顺性提供了有效途径。
在国内外汽车市场竞争日益激烈的今天,如何在汽车设计阶段就能对 汽车平顺性进行准确预测和评估,缩短设计周期,降低生产成本,已经成为在市场竞争中取胜的关键。为此,对汽车行驶平顺性进行了仿真同时对结果进行了分析。
主要研究内容
本文通过建立整震动的空间7自由度模型,对悬架进行平顺性仿真工作,具体可以分为以下几个部分:
1. 建立起空间七自由度的汽车振动数学模型。
2. 利用Matlab/Simulink 对悬架进行平顺性仿真。
3. 对论文的工作进行总结。
整车模型的建立及参数
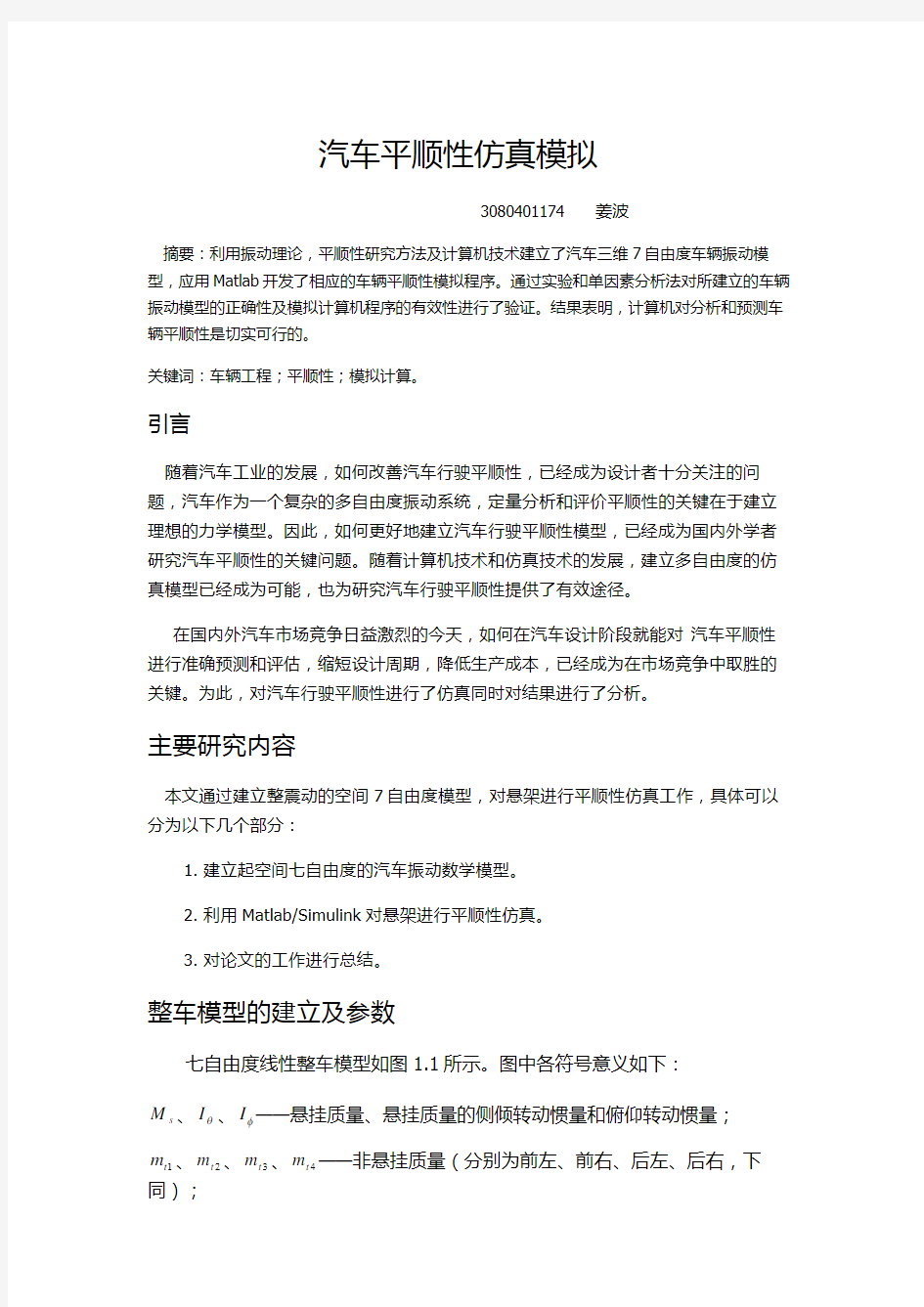
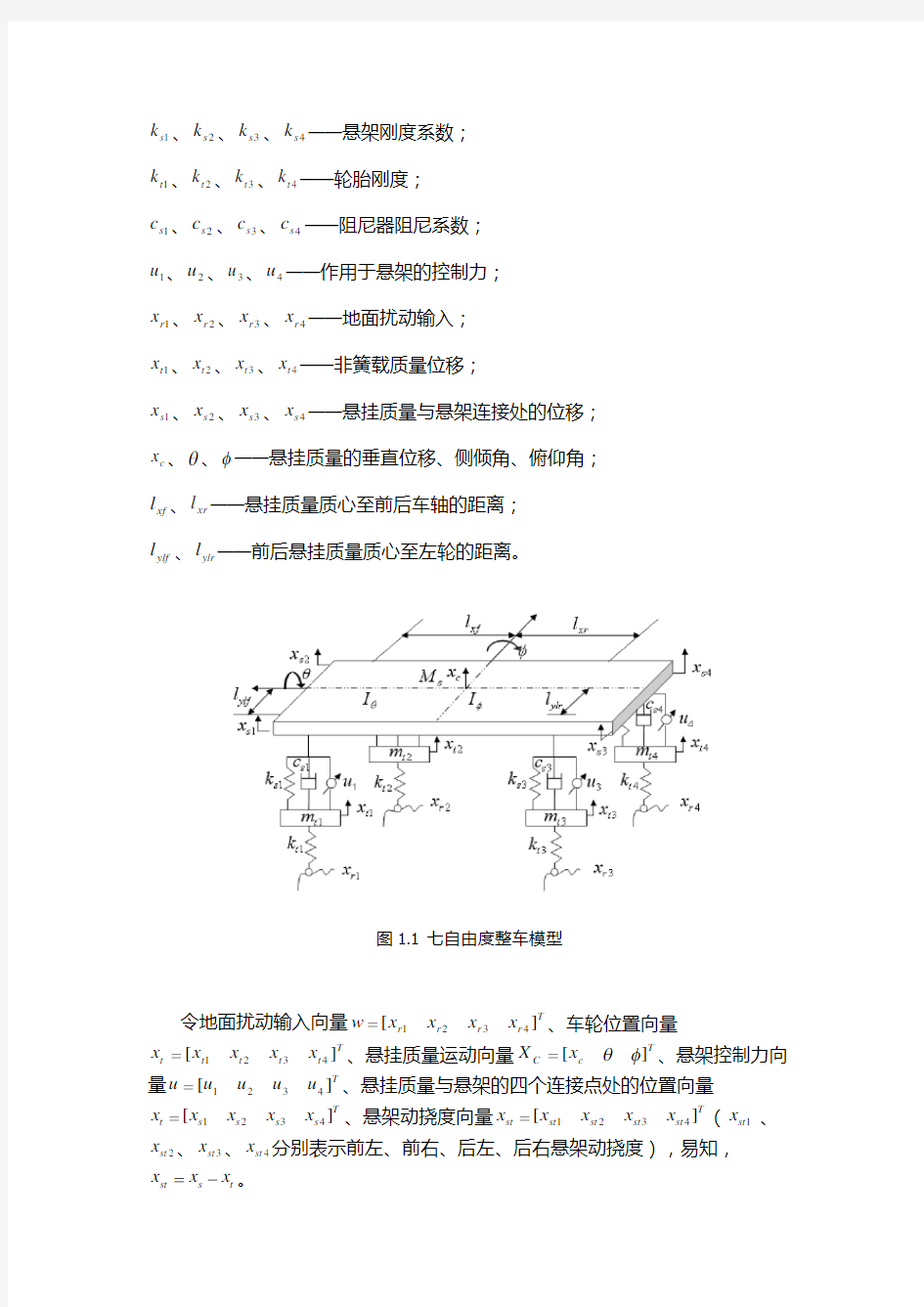
七自由度线性整车模型如图1.1所示。图中各符号意义如下:
s M 、θI 、φI ——悬挂质量、悬挂质量的侧倾转动惯量和俯仰转动惯量; 1t m 、2t m 、3t m 、4t m ——非悬挂质量(分别为前左、前右、后左、后右,下同);
1s k 、2s k 、3s k 、4s k ——悬架刚度系数;
1t k 、2t k 、3t k 、4t k ——轮胎刚度;
1s c 、2s c 、3s c 、4s c ——阻尼器阻尼系数;
1u 、2u 、3u 、4u ——作用于悬架的控制力;
1r x 、2r x 、3r x 、4r x ——地面扰动输入;
1t x 、2t x 、3t x 、4t x ——非簧载质量位移;
1s x 、2s x 、3s x 、4s x ——悬挂质量与悬架连接处的位移;
c x 、θ、φ——悬挂质量的垂直位移、侧倾角、俯仰角;
xf l 、xr l ——悬挂质量质心至前后车轴的距离;
ylf l 、ylr l ——前后悬挂质量质心至左轮的距离。
图1.1 七自由度整车模型
令地面扰动输入向量T r r r r x x x x w ][4321
=、车轮位置向量T t t t t t x x x x x ][432
1=、悬挂质量运动向量T c
C x X ][φθ=、悬架控制力向量T u u u u u ][4321
=、悬挂质量与悬架的四个连接点处的位置向量T s s s s t x x x x x ][4321=、悬架动挠度向量T st st st st st x x x x x ][432
1=(1st x 、2st x 、3st x 、4st x 分别表示前左、前右、后左、后右悬架动挠度),易知,t s st x x x -=。
根据悬架的特点和几何关系可以得出:
C s HX x = (1)
式中 ??????
????????----=xr ylr xr ylr xf ylf xf ylf l l l l l l l l H 1111 根据牛顿第二定律,系统总的运动方程可表示为:
)()()()()(w x K u x X H C x HX K x M u H x X H C H x HX K H X M t
t t C S t C s t t T t C S T t C s T C b ----+-=+----= (2) 式中
),,(φθI I M diag M s b =,),,,(4321s s s s s k k k k diag K =,),,,(4321s s s s s c c c c diag C =,),,,(4321t t t t t m m m m diag M =,),,,(4321t t t t t k k k k diag K =
令[]T t C x X x
=?则上述运动微分方程可以表示为: u E w E x K x D x
M 21???+=++ (3) 式中
??????=t b M M M ,??????+--=t s s s T s T K K H
K K H H K H K ,??
????--=s s s T s T C H C C H H C H D ,??????=t K E 01,??????-=I H E T 2 选取状态向量[]
T x x x ??~= ,则式(3.5)的状态空间形式为: u B w B x A x 21~~~~~
++= (4) 式中 ??????--=--D M K M I
A 110~,??????=-1110~E M
B ,??????=-2120~E M B 本次设计把u 都设为了0。
仿真模型
平顺性试验结果
T c C x X ][φθ=T t t t t t x x x x x ][4321=然后就是其对应的导数,然后就是xc 的加速度,xt3的加速度。图就是按这个顺序先后排列的。
结论
改变参数可以对悬架模型进行基本分析,如悬架参数包括悬架刚度系数悬阻尼系数等对模型振动的影响。随着悬架弹性系数的增加,加速度值不是单调减小。随着悬架阻尼系数的增加,加速度明显下降。所以从提高舒适性的角度出发,增加阻尼系数能有效提高舒适性。通过车辆行驶速度和簧上质量加速度响应之间的关系的研究也可以得到,随着行驶速度的增加,车辆的舒适性降低。这些研究为悬架的设计和参数的选择提供了理论依据。最后,通过这次仿真模型的建立,不仅对改善汽车平顺性有了更深的了解,同时也进一步掌握matlab的应用,提高了自身的科学文化素质。
参考文献
1.余志生汽车理论,北京:机械工业出版社。
2.M·米克奇汽车动力学,北京:人民交通出版社。
3.孙建成车辆行驶平顺性的预测及研究,汽车研究与开发。
4.徐镇、江浩斌、陈步达车辆行驶平顺性的计算机辅助分析,江苏理工大学学报。
5.王连明,宋宝玉,周岩等汽车平顺性建模及其仿真研究,哈尔滨工业大学学报。
详细步骤MATLAB车辆两自由度操纵稳定性模型分析
基于MATLAB的车辆两自由度操纵稳定性模型及分析 汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。 车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。 1二自由度汽车模 为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2 运动学分析 确定汽车质心的(绝对)加速度在车辆坐标系的分量 和。Ox 与Oy 为车辆坐标系的纵轴与横轴。质心速度 与t 时刻在Ox 轴上 的分量为u ,在oy 轴上的分量为v 。 2.1 沿Ox 轴速度分量的变化为: ()()cos sin cos cos sin sin u u u v v u u u v v θθ θθθθ+??--+??=?+??---?? 考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便 是汽车质心绝对加速度在车辆坐标系。
沿Ox 轴速度分量的变化为: u x r d d v u v dt dt a θω=-=- 同理,汽车质心绝对加速度沿横轴oy 上的分量为:y r v u a ω=+ 2.2 二自由度动力学方程 二自由度汽车受到的外力沿y 轴方向的合力与绕质心的力矩和为: 12 12cos a cos Y Y Y Z Y Y b F F F M F F δδ=+=-∑∑ 式中,,为地面对前后轮的侧向反作用力;为前轮转角。 考虑到很小,上式可以写上: 11221122 a Y Z b k k F k k M αα αα=+=-∑∑ 根据坐标系的规定,前后侧偏角为: ()12r r r a u v b b u u δξβδβωαωωα=--=+ --==- 由此,可以列出外力,外力矩与汽车参数的关系式为: 1212r r Y r r Z a b u u a b a b u u k k F k k M βδββδβωωωω????=+-+- ? ?????????=+--- ? ????? ∑∑ 所以,二自由度汽车的运动微分方程为: ()1212r r r r r z r a b m v u u u a b a b u u k k k k I βδββδβωωωωωω????+-+-=+ ? ?????????+---= ? ???? ? 上式可以变形为:
基于MATLAB的汽车平顺性的建模与仿真
(1) 基于MATLAB 的汽车平顺性的建模与仿真 车辆工程专硕1601 Z1604050 晨 1. 数学建模过程 1.1建立系统微分方程 如下图所示,为车身与车轮二自由度振动系统模型: 图中,m2为悬挂质量(车身质量);m1为非悬挂质量(车轮质量);K 为弹簧刚度;C 为减振器阻尼系数;Kt 为轮胎刚度;z1为车轮垂直位移;z2为车身垂直位移;q 为路面不平度。 车轮与车身垂直位移坐标为z1、z2,坐标原点选在各自的平衡位置,其运动方程为: 222121 ()()0m z C z z K z z +-+-=1112121()()()0t m z C z z K z z K z q +-+-+-=
(2) (3) (4) (5) (6) 1.2双质量系统的传递特性 先求双质量系统的频率响应函数,将有关各复振幅代入,得: 令: 232t A m j C K K ωω=-+++ 由式(2)得z 2-z 1的频率响应函数: 将式(4)代入式(3)得z 1-q 的频率响应函数: 式中: 下面综合分析车身与车轮双质量系统的传递特性。车身位移z 2对路面位移q 的频率响应函数,由式(4)及(5)两个环节的频率响应函数相乘得到: 2221()() z m j C K z j C K ωωω-++=+2111()()t t z m j C K K z j C K qK ωωω-+++=++1A j C K ω=+K C j m A ++-=ωω222212 122 z A j C K z m K j C A ωωω+==-++2321 N A A A =-212211=t t A K A K z z z A q z q A N N ==
七自由度车辆图和数学模型
图一.七自由度车辆动力学模型
纵向力平衡方程: 121234 ()()cos ()sin x y x x y y x x m V r V F F F F F F δδ? -?=+-+++侧向力平衡方程: 121234 ()()sin ()cos y x x x y y y y m V r V F F F F F F δδ? +?=+++++绕Z 轴力矩平衡方程: 1 121221122 4334[()sin ()cos ][()cos ()sin ] 2 ()()2 w z x x y y x x y y w x x y y t I r F F F F a F F F F t F F F F b δδδδ? ?=++++-+-+--+四个车轮的力矩平衡方程: tw w xi bi di I R F T T i w ? ?=-?-+ 上述方程中:δ为前轮转角;Vx ,Vy 分别为纵向、横向车速;β为质心侧偏角;γ为横摆角速度;Fxi 、Fyi 、Fzi 分别为轮胎纵向力、侧向力、垂向力;i=1、2、3、4,为分别对应的车轮;m 为整车质量;ms 为悬挂质量;a 、b 为前后轴到质 心的距离;l=a+b 为前后轴距;tw1为前轴轮距;tw2为后轴轮距;d= 12 2 tw tw +为 平均轮距;Iz 为整车绕Z 轴的转动惯量;h 为质心到地面的距离; 纵向加速度为x x y a V r V ? =-? 侧向加速度为 y y x a V r V ? =+?
各轮胎垂向载荷公式: 123422222222z s x s y z s x s y z s x s y z s x s y b h h b F mg m a m a l l d l b h h b F mg m a m a l l d l a h h a F mg m a m a l l d l a h h a F mg m a m a l l d l =--? =-+? =+-? =++? 各轮胎侧偏角公式: 1 1 2 2 12223242arctan()arctan()arctan()arctan()w w w w t t t t Vy ar Vx r Vy ar Vx r Vy br Vx r Vy br Vx r αδαδαα+=--+=-+-=---=-+
基于MATLAB的汽车振动控制仿真
摘要 机械振动主要是谐波,阻尼,强制三种。对于三个振动模型,列出了振动方程,然后给出了三个振动的初始条件。在模拟过程中产生的一系列速度和汽车行驶时候产生的振动,势能和机械能的三个功能可以通过MATLAB函数模拟,以随时间改变图像。然后,我们可以经过一系列的计算的出我们需要的函数方程和一些弹簧模拟图像,在后面可以进行一系列的导数计算,在MATLAB软件中可以画出不同的位移,汽车造成的损坏的函数图像,再通过在MATLAB的绘制,可以简单明细的看出汽车振动的能量变化。最后再比较不同的图像,可以得出不同的结果,可以进行汽车改良。就可以探索出最佳的方法来研究汽仿真。 关键词:简谐振动阻尼振动评价系数仿真软件。
Abstract Mechanical vibration is mainly harmonic, damping, forced three. For the three vibration models, the vibration equations are listed, and then the initial conditions for the three vibrations are given. The three functions produced during the simulation process and the three functions of vibration, potential energy and mechanical energy generated when the vehicle travels can be simulated by MATLAB functions to change the image over time. Then we can go through a series of calculations out of the functional equations we need and some of the spring simulations of the image, which can be followed by a series of derivative calculations that can be plotted in the MATLAB software for different displacements, , And then through the drawing in MATLAB, you can simply see the details of the car vibration energy changes. Finally compare the different images, you can get different results, you can improve the car. You can explore the best way to study the steam simulation. Keywords:simple harmonic oscillationdamping oscillationappraisement coefficientsimulation software.
基于MATLAB的汽车运动控制系统设计仿真
课程设计 题目汽车运动控制系统仿真设计学院计算机科学与信息工程学院班级2010级自动化班 姜木北:2010133*** 小组成员 指导教师吴 2013 年12 月13 日
汽车运动控制系统仿真设计 10级自动化2班姜鹏2010133234 目录 摘要 (3) 一、课设目的 (4) 二、控制对象分析 (4) 2.1、控制设计对象结构示意图 (4) 2.2、机构特征 (4) 三、课设设计要求 (4) 四、控制器设计过程和控制方案 (5) 4.1、系统建模 (5) 4.2、系统的开环阶跃响应 (5) 4.3、PID控制器的设计 (6) 4.3.1比例(P)控制器的设计 (7) 4.3.2比例积分(PI)控制器设计 (9) 4.3.3比例积分微分(PID)控制器设计 (10) 五、Simulink控制系统仿真设计及其PID参数整定 (11) 5.1利用Simulink对于传递函数的系统仿真 (11) 5.1.1 输入为600N时,KP=600、KI=100、KD=100 (12) 5.1.2输入为600N时,KP=700、KI=100、KD=100 (12) 5.2 PID参数整定的设计过程 (13) 5.2.1未加校正装置的系统阶跃响应: (13) 5.2.2 PID校正装置设计 (14) 六、收获和体会 (14) 参考文献 (15)
摘要 本课题以汽车运动控制系统的设计为应用背景,利用MATLAB语言对其进行设计与仿真.首先对汽车的运动原理进行分析,建立控制系统模型,确定期望的静态指标稳态误差和动态指标搬调量和上升时间,最终应用MATLAB环境下的.m 文件来实现汽车运动控制系统的设计。其中.m文件用step函数语句来绘制阶跃响应曲线,根据曲线中指标的变化进行P、PI、PID校正;同时对其控制系统建立Simulink进行仿真且进行PID参数整定。仿真结果表明,参数PID控制能使系统达到满意的控制效果,对进一步应用研究具有参考价值,是汽车运动控制系统设计的优秀手段之一。 关键词:运动控制系统 PID仿真稳态误差最大超调量
线性二自由度汽车模型的运动微分方程
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且 l r Z Z F F ; (3)汽车前进速度u 视为不变; (4)侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用。 在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 与 为车辆坐标系的纵轴和横轴。质心速度 于时刻在 轴上的分量为 ,在 轴上的分量为 。由于汽车转向行驶时伴有平移和转动,在时刻,车辆坐标系中质心速度的大小与方向均发生变 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿 轴速度分量变化为:
考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量 同理得: 下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成:
下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成: 汽车前后轮侧偏角与其运动参数有关。如上图所示,汽车前后轴中点的速度为,;前后轮侧偏角为, ;质心侧偏角为,;为与轴的夹角,其值为:
线性二自由度汽车模型的运动微分方程
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z轴的位移、绕y轴的俯仰角和绕x轴的侧倾角均为零,且F Zr Fzi ; (3)汽车前进速度u视为不变; (4)侧向加速度限定在0.4g —下,确保轮胎侧偏特性处于线性围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 閒代后护曲轮汽车枠即及车辆咐标丟 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 "T与W为车辆坐标系的纵轴和横轴。质心速度V l于f时刻在轴上的分量为|/<,在°匸轴上的分量为 卜。由于汽车转向行驶时伴有平移和转动,在'时刻,车辆坐标系中质心速度的大小与方向均发生变 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿'■轴速度分量变化为: (? + Av)sin A" =u cos A6? + cos A 0 it -vsin 0 Avsin \0 考虑到△ 6很小并忽略二阶微量,上式变成:\u -K A0
除以Ar并取极限,便是汽车质心绝对加速度在车辆坐标系\ox上的分量 du dO * a -- ----- v——= n-va) x dt dt r 同理得:叭"刊叫 下面计算二自由度汽车的动力学方程 < ------------------------------ --------------------------------------- ih 二自由度汽车受到的外力沿匸"|轴方向的合力与绕质心的力矩和为 》禺=洛心方"二11 式中,如,比为地面对前后轮的侧向反作用力,即侧偏力;/为前轮转角考虑到’很小,上式可以写成:
线性二自由度汽车模型的运动方程
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化: (1)忽略转向系统的影响,直接以前轮转角作为输入; (2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且 l r Z Z F F ; (3)汽车前进速度u 视为不变; (4)侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围; (5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用。 在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。 分析时,令车辆坐标系原点与汽车质心重合。 首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 与 为车辆坐标系的纵轴和横轴。质心速度 于时刻在 轴上的分量为 ,在 轴上的分量为 。由于汽车转向行驶时伴有平移和转动,在时刻,车辆坐标系中质心速度的大小与方向均发生变 化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿 轴速度分量变化为:
考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量 同理得: 下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成:
下面计算二自由度汽车的动力学方程 二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为 式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。 考虑到很小,上式可以写成: 汽车前后轮侧偏角与其运动参数有关。如上图所示,汽车前后轴中点的速度为,;前后轮侧偏角为,;质心侧偏角为,;为与轴的夹角,其值为:
基于Matlab的车牌识别(完整版)
基于Matlab的车牌识别 摘要:车牌识别技术是智能交通系统的重要组成部分,在近年来得到了很大的发展。本文从预处理、边缘检测、车牌定位、字符分割、字符识别五个方面,具体介绍了车牌自动识别的原理。并用MATLAB软件编程来实现每一个部分,最后识别出汽车车牌。 一、设计原理 车辆车牌识别系统的基本工作原理为:将摄像头拍摄到的包含车辆车牌的图像通过视频卡输入到计算机中进行预处理,再由检索模块对车牌进行搜索、检测、定位,并分割出包含车牌字符的矩形区域,然后对车牌字符进行二值化并将其分割为单个字符,然后输入JPEG或BMP格式的数字,输出则为车牌号码的数字。车牌自动识别是一项利用车辆的动态视频或静态图像进行车牌号码、车牌颜色自动识别的模式识别技术。其硬件基础一般包括触发设备、摄像设备、照明设备、图像采集设备、识别车牌号码的处理机等,其软件核心包括车牌定位算法、车牌字符分割算法和光学字符识别算法等。某些车牌识别系统还具有通过视频图像判断车辆驶入视野的功能称之为视频车辆检测。一个完整的车牌识别系统应包括车辆检测、图像采集、车牌识别等几部分。当车辆检测部分检测到车辆到达时触发图像采集单元,采集当前的视频图像。车牌识别单元对图像进行处理,定位出车牌位置,再将车牌中的字符分割出来进行识别,然后组成车牌号码输出。 二、设计步骤 总体步骤为: 车辆→图像采集→图像预处理→车牌定位
→字符分割→字符定位→输出结果 基本的步骤: a.车牌定位,定位图片中的车牌位置; b.车牌字符分割,把车牌中的字符分割出来; c.车牌字符识别,把分割好的字符进行识别,最终组成车牌号码。 车牌识别过程中,车牌颜色的识别依据算法不同,可能在上述不同步骤实现,通常与车牌识别互相配合、互相验证。 (1)车牌定位: 自然环境下,汽车图像背景复杂、光照不均匀,如何在自然背景中准确地确定车牌区域是整个识别过程的关键。首先对采集到的视频图像进行大范围相关搜索,找到符合汽车车牌特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,最后选定一个最佳的区域作为车牌区域,并将其从图象中分割出来。 流程图: (2)车牌字符分割 : 完成车牌区域的定位后,再将车牌区域分割成单个字符,然后进行识别。字符分割一般采用垂直投影法。由于字符在垂直方向上的投影必然在字符间或字符内的间隙处取得局部最小值的附近,并且这个位置应满足车牌的字符书写格式、字符、尺寸限制和一些其他条件。利用垂直投影法对复杂环境下的汽车图像中的字符分割有较好的效果。 导入原始图像 图像预处理增强效果图像 边缘提取 车牌定位 对图像开闭运算
基于MATLAB的汽车制动系统设计与分析软件开发.
基于MAT LAB 的汽车制动系统 3 设计与分析软件开发 孙益民(上汽汽车工程研究院 【摘要】根据整车制动系统开发需要, 利用MAT LAB 平台开发了汽车制动系统的设计和性能仿真软件。 该软件用户界面和模块化设计方法可有效缩短开发时间, 提高设计效率。并以上汽赛宝车为例, 对该软件的可行性进行了验证。 【主题词】制动系汽车设计 统分成两个小闭环系统, 使设计人员更加容易把 1引言 制动性能是衡量汽车主动安全性的主要指标。如何在较短的开发周期内设计性能良好的制动系统一直是各汽车公司争相解决的课题。 本文拟根据公司产品开发工作需要, 利用现有MA T LAB 软件平台, 建立一套面向设计工程师, 易于调试的制动开发系统, 实现良好的人机互动, 以提高设计效率、缩短产品开发周期。 握各参数对整体性能的影响, 使调试更具针对性。 其具体实施过程如图1所示。 3软件开发
与图1所示的制动系统方案设计流程对应, 软件开发也按照整车参数输入、预演及主要参数确定, 其他参数确定和生成方案报告4个步骤实现。3. 1车辆参数输入 根据整车产品的定位、配置及总布置方案得出空载和满载两种条件下的整车质量、前后轴荷分配、质心高度, 轮胎规格及额定最高车速。以便获取理想的前后轴制动力分配及应急制动所需面临的极限工况。 3. 2预演及主要参数确定 在获取车辆参数后, 设计人员需根据整车参数进行制动系的设计, 软件利用MAT LAB 的G U I 工具箱建立如图2所示调试界面。左侧为各主要参数, 右侧为4组制动效能仿真曲线, 从曲线可以查看给定主要参数下的制动力分配、同步附着系数、管路压力分配、路面附着系数利用率随路况的变化曲线, 及利用附着系数与国标和法规的符合现制动器选型、性能尺寸调节, 查看液压比例阀、感载比例阀、射线阀等多种调压工况的制动效能, 并通过观察了 2汽车制动系统方案设计流程的优化 从整车开发角度, 制动系统的开发流程主要包括系统方案设计、产品开发和试验验证三大环节。制动系统的方案设计主要包含结构选型、参数选择、性能仿真与评估, 方案确定4个环节。以前, 制动系统设计软件都是在完成整个流程后, 根据仿真结果对初始设计参数修正。因此, 设计人员往往要反复多次方可获得良好的设计效果, 而且, 在调试过程中, 一些参数在特定情况下的相互影响不易在调试中发现, 调试的尺度很难把握。 本文将整车设计流程划分为两个阶段:主要参数的预演和确定、其他参数的预演和参数确定。即根据模块化设计思想, 将原来一个闭环设计系 收稿日期:2004-12-27 3本文为上海市汽车工程学会2004年(第11届学术年会优秀论文。
线性二自由度汽车操纵稳定性Simulink仿真
线性二自由度汽车操纵稳定性Simulink 仿真 汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能够遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且遇到外界干扰时,汽车能够抵抗干扰而保持稳定行驶的能力,汽车的操纵稳定性是汽车主动安全性的重要评价指标之一。 操纵稳定性包括:汽车在转向盘输入或外界干扰输入下的侧向运动响应随时间而变化的特性称为时域响应特性;转向盘输入有角位移输入和力矩输入;外界干扰输入主要指侧向风和路面不平产生的侧向力。 1. 转向盘角阶跃输入下的响应 稳态响应,评价参量为 横摆角度速度增益—转向灵敏度 瞬态响应,评价参量为 反应时间;横摆角速度波动的无阻尼园频率。 2. 横摆角速度频率响应特性 转向盘转角正弦输入下,频率由0至∞变化时,汽车横摆角速度与转向盘转角的振幅比及相位差的变化规律。评价参量为:共振峰频率;共振时的振幅比;相位滞后角;稳态增益。 3. 转向盘中间位置操纵稳定性 转向盘小转角、低频正弦输入下,汽车高速行驶时的操纵稳定性。评价参量为:转向灵敏度、转向盘力特性、转向功灵敏度。 4. 回正性 转向盘力输入下的时域响应。评价参量为:回正后剩余横摆角速度与剩余横摆角;达到剩余横摆角速度的时间。 轮胎的侧偏特性为:αk F Y =,k 为侧偏刚度,Y F 一定时,侧偏角越小越好,因此k 越大越好;前轮侧偏角在4度内时,轮胎侧偏特性呈线性变化。 图1 线性二自由度汽车模型对前轮角输入的响应 建模假设:忽略转向系统的影响,直接以前轮转角为输入;忽略悬架的作用,车身仅作平行于地面的平面运动,绕z 轴的位移、绕y 轴的俯仰角和绕x 轴的侧倾角均为零;汽车前进速度不变。汽车被简化为只有侧向和横摆两个自由度的两轮汽车模型。
基于MATLAB的汽车道路模型研究毕业设计论文
武汉工业学院 毕业设计(论文) 毕业设计(论文)题目:基于MATLAB的汽车道路模型研究 院(系)机械工程学院 专业名称机械设计制造及其自动化
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
车辆系统动力学-复习提纲
1. 简要给出完整约束与非完整约束的概念2-23,24,25, 1)、约束与约束方程 一般的力学系统在运动时都会受到某些几何或运动学特性的限制,这些构成限制条件的具体物体称为约束,用数学方程所表示的约束关系称为约束方程。 2)、完整约束与非完整约束 如果约束方程只是系统位形及时间的解析方程,则这种约束称为完整约束。 完整约束方程的一般形式为: 式中,qi为描述系统位形的广义坐标(i=1,2,…,n);n为广义坐标个数;m为完整约束方程个数;t为时间。 如果约束方程是不可积分的微分方程,这种约束就称为非完整约束。 一阶非完整约束方程的一般形式为:
式中,qi为描述系统位形的广义坐(i = 1, 2, …,n);为广义坐标对时间的一阶与数;n为广义坐标个数;m为系统中非完整约束方程个数;t为时间。 2. 解释滑动率的概念3-7,8 1.滑动率S 车轮滑动率表示车轮相对于纯滚动(或纯滑动)状态的偏离程度,是影响轮胎产生纵向力的一个重要因素。 为了使其总为正值,可将驱动和被驱动两种情况分开考虑。驱动工况时称为滑转率;被驱动(包括制动,常以下标b以示区别)时称为滑移率,二者统称为车轮的滑动率。
参照图3-2,若车轮的滚动半径为rd,轮心前进速度(等于车辆行驶速度)为uw,车轮角速度为ω,则车轮滑动率s定义如下: 车轮的滑动率数值在0~1之间变化。当车轮作纯滚动时,即uw=rd ω,此时s=0;当被驱动轮处于纯滑动状态时,s=1。 3. 轮胎模型中表达的输入量和输出量有哪些?3-22,23 轮胎模型描述了轮胎六分力与车轮运动参数之间的数学关系,即轮胎在特定工作条件下的输入和输出之间的关系,如图3-7所示。 根据车辆动力学研究内容的不同,轮胎模型可分为:
基于Matlab的汽车制动性分析
基于Matlab的汽车制动性分析 摘要:如今汽车的安全性已经成为人们所关注的热点,由于汽车制动性直接关系到交通安全,重大交通事故往往与制动距离太长、紧急制动时发生侧滑等情况有关,故汽车的制动性是汽车安全行驶的重要保障。改善汽车的制动性,始终是汽车设计制造和使用部门的重要任务。 汽车的制动性能好坏直接决定汽车的安全性,在一定程度上它将决定驾驶员的生命安全,因此通过分析汽车的制动性能,就显得极为重要。改善汽车的制动性,首先应对其分析了解。为了更好的分析制动性,本文提出了基于Matlab软件汽车制动性能分析。利用Matlab软件建模方便、更易于对其进行分析。建立了地面制动力、制动器制动力与附着力之间的关系图,理想的前、后制动器制动力分配时,地面制动力,制动器制动力与附着力之间的关系图,同时还有f线组与r线组详细关系图。 关键词:制动性能;Matlab软件;建模;分析
Study on Braking Features of Car Based on Matlab Abstract:At present, the security of cars has become the focus of people' attention. Cars' braking has direct relation to the transportation safety. Some big incidents are often caused by the long distance and slipering when braking. so it is always the cars manufaturers' first and foremost task to improve the the function of braking. Cars' braking directly determine its safety, to some degree, the drivers' lives. So it seems very important to analyze car' braking feature. To improve the braking feature, we should first analyze it , and to have a better analysis of braking, we bring forward the analysis based on Matlab software, which has made our job easier and more convenient. Keywords:Features of braking; Matlab software; Models building; Analysis
基于MATLAB的汽车减震系统仿真建模
问题描述及空间状态表达式的建立 1.1问题描述 汽车减震系统主要用来解决路面不平而给车身带来的冲击,加速车架与车身振动的衰减,以改善汽车的行驶平稳性。如果把发动机比喻为汽车的“心脏”,变速器为汽车的“中枢神经”,那么底盘及悬挂减震系统就是汽车的“骨骼骨架”。减震系统不仅决定了一辆汽车的舒适性与操控性同时对车辆的安全性起到很大的决定作用,随着人们对舒适度要求的不断提高,减震系统的性能已经成为衡量汽车质量及档次的重要指标之一。 图1.悬架减震系统模型 汽车减震系统的目的是为了减小路面的颠簸,为人提供平稳、舒适的感觉。图2,是一个简单的减震装置的原理图。它由一个弹簧和一个减震器组成。 从减震的角度看,可将公路路面看作是两部分叠加的结果:一部分是路面的不平行度,在汽车的行驶过程中,它在高度上有一些快速的小幅度变化,相当于高频分量;另一部分是整个地形的坡度,在汽车的行驶过程中,地形的坡度有一个缓慢的高度变化,相当于低频分量。减震系统的作用就是要在汽车的行驶过程中减小路面不平所引起的波动。因此,可以将减震系统看成是一个低通滤波器。 图2.减震系统原理图
1.2空间状态表达式的建立 对该系统进行受力分析得出制约底盘运动的微分方程(数学模型)是: 22()()()()()d y t dy t dx t M b ky t kx t b dt dt dt ++=+ 其中,M 为汽车底盘的承重质量,k 为弹簧的弹性系数,b 为阻尼器的阻尼系数。将其转化为系统传递函数: 22 2()()()2()n n n n s H s s s ωεωεωω+=++ 其中,n ω为无阻尼固有频率,ε为阻尼系数。并且, n ω= 2n b M ξω= 通过查阅相关资料,我们知道,汽车减震系统阻尼系数ε=0.2~0.4,而我们希望n ω越大越好。在下面的计算中,我们规定n ω=6,ε=0.2。所以,系统传递函数,可以转化为: 2() 2.436() 2.436 Y s s U s s s +=++ 根据现代控制理论知识,结合MATLAB 工具,将传递函数转化为状态空间矩阵和输出矩阵表示。 在MATLAB 中输入, [][][]()A,B,C,D tf2ss 2.4 36,1 2.4 36= 能够得到: 2.4361 0A --??= ??? 10B ??= ??? []2.436C = [0]D =。 进而,通过现代控制理论,可以将系统状态变量图绘制出来。
七自由度整车模型及参数
七自由度整车模型及参数 七自由度线性整车模型如图1.1所示。图中各符号意义如下: s M 、θI 、φI ——悬挂质量、悬挂质量的侧倾转动惯量和俯仰转动惯量; 1t m 、2t m 、3t m 、4t m ——非悬挂质量(分别为前左、前右、后左、后右,下同); 1s k 、2s k 、3s k 、4s k ——悬架刚度系数; 1t k 、2t k 、3t k 、4t k ——轮胎刚度; 1s c 、2s c 、3s c 、4s c ——阻尼器阻尼系数; 1u 、2u 、3u 、4u ——作用于悬架的控制力; 1r x 、2r x 、3r x 、4r x ——地面扰动输入; 1t x 、2t x 、3t x 、4t x ——非簧载质量位移; 1s x 、2s x 、3s x 、4s x ——悬挂质量与悬架连接处的位移; c x 、θ、φ——悬挂质量的垂直位移、侧倾角、俯仰角; xf l 、xr l ——悬挂质量质心至前后车轴的距离; ylf l 、ylr l ——前后悬挂质量质心至左轮的距离。 图1.1 七自由度整车模型 令地面扰动输入向量T r r r r x x x x w ][4321 =、车轮位置向量T t t t t t x x x x x ][4321 =、悬挂质量运动向量T c C x X ][φθ=、悬架控制力向量T u u u u u ][4321 =、悬挂质量与悬架的四个连接点处的位置向量T s s s s t x x x x x ][4321=、悬架动挠度向量T st st st st st x x x x x ][4321=(1st x 、2st x 、3st x 、4st x 分别表示前左、前右、后左、后右悬架动挠度),易知,t s st x x x -=。 根据悬架的特点和几何关系可以得出: C s HX x = (1)
汽车五自由度建模
汽车振动大作业
、汽车悬架系统振动模型 汽车是一个复杂的振动系统,在振动分析的建模过程当中,要根据所分析的问题对汽车 进行简化,建立相应的模型。现在考虑汽车车身悬架的五自由度模型,如下图1所示,该模型主要考虑左右车辙的不平度差异和较小的轮胎阻尼而得到的,该模型中主要有车身的垂 直、俯仰两个自由度和前后车轴质量两个垂直自由度,汽车座椅一个垂直自由度,系统共五 个自由度,其中车身质量的垂直、俯仰两个自由度的振动对系统平顺性的影响较大,假设车身是具有垂直和俯仰两个自由度的刚体,其车身的质量和转动惯量分别为:m h和I h,前后车轮质量、悬架参数和轮胎刚度的符合前加入了分别表示前(front)和后(rear)的下标“ f”和“r”,如图1示: 图1五自由度汽车悬架系统 图1中:z1表示前轮转动位移自由度;z2表示车体垂直位移自由度;z3 z1表示后轮转动位移自由度;z4俯仰转动位移自由度;z5表示驾驶员座椅垂向自由度;m1表示驾驶员座椅质量;m2表示车体质量;m( f) m3表示前轮质量;m(r) m4表示后轮质量;k1表 示座椅弹簧刚度;k2,k3,k4,k5悬架弹簧刚度;c1表示座椅弹簧阻尼;c2,c3, c4, c5表示悬架弹簧阻尼;a表示车身质心至前轴距离;b车身质心至后轴距离,F(f), F(r)分别为前 后轮随机激励力。
、运动微分方程 d ( T) ( T) dt z z 可得到多自由度的运动微分方程: V —F Qi 0 (i 1,2, ,5) 乙 Mz(t) Cz(t) Kz(t) F(t) 式中: m i 0 0 0 0 0 m 2 0 0 0 M 0 0 m 3 0 0 0 0 0 0 0 0 0 0 m 5 C 1 C 1 dG Ci C 1 C 2 C 3 dCi ac 2 bC 3 C 2 C 3 C dC 1 dCi ac 2 bC 3 d 2G 2 .2 a C 2 b C 3 aC 2 bC 3 0 C 2 ac 2 C 3 C 4 0 C 3 bC 3 C 3 C T 1m 1z 12 1 2 m 2z 2 1 2 m 4z 4 1 2 m )5Z 5 1 5 2 -m i z (m 3 I) 2 2 2 2 2 2 i 1 由图1可得到下述理论值: (1)系统的动能为: (2)系统的势能为: (1-2) 1 2 1 2 2kl(z2 Z1 dZ3)尹⑵ Z2 az3) fk 3(Z 5 Z 2 bz 3)2 1 2 1 2 gk 4( Z 4 F(f))2 2k s (Z 5 F(r))2 (1-3) C G (Z 2 Z 1 dz 3)(GZ 2 GN dGZ 3) C 2(Z 4 Z 2 bZ 3)(C 2 Z 4 C 2Z 2 dC 2 Z 3) C s (Z 5 Z 2 bZ 3)(C 3Z 5 C 3Z 2 bQZ 3) C 4(Z 5 F (f))C 4 乙 C 5(Z 5 F (r))C 5Z 5 ⑶ 系统阻尼耗散的能量: 由拉格朗日运动方程: (1-4)
基于MATLAB的汽车悬架仿真研究
基于MATLAB的汽车悬架仿真研究 周新鹏 (昆明理工大学交通工程学院,云南昆明) 摘要:针对不同悬架的性能特点,分别建立了被动悬架、主动悬架的车身与车轮二自由度振动模型,基于Matlab 软件用白噪声法模拟了路面不平度随机输入,在此基础上,对被动悬架与主动悬架的性能进行了仿真对比。仿真结果表明:主动悬架能更好地衰减振动,因此具有更佳的平顺性。 关键词:汽车主动悬架被动悬架Matlab 引言 悬架是车架(或承载式车身)与车桥(或车轮)之间一切传力连接装置的总称,用以把路面作用于车轮上的各种力和力矩传递到车架上[1],同时还起到缓和冲击、吸收振动、提高平顺性与乘坐舒适性的作用。传统悬架的刚度和阻尼是按经验或优化设计的方法确定的,在汽车行驶过程中,其性能不变,也无法调节,从而使汽车平顺性与乘坐舒适性受到一定的影响,因此称这种悬架系统为被动悬架。主动悬架可根据汽车的行驶条件的变化对刚度和阻尼进行动态地自适应调节,因此能使悬架系统始终处于最佳状态[2]。车身垂直位移决定了汽车振动时振幅的大小,悬架行程直接影响撞击限位的概率,而车身加速度是评价汽车平顺性的主要指标[3],因此,本研究主要从车身垂直位移、车身加速度、悬架行程等几个方面比较主动悬架与被动悬架的特性。 1.汽车悬架相关理论 汽车悬架系统由弹性元件、导向元件和减振器等部分组成。弹性元件用来传递并承受垂直载荷,它也具有一定的吸振能力;导向元件用来传递纵向力、侧向力和由此产生的力矩;减振器用来迅速减小车身和车架的振动。 汽车悬架一般应具备以下功能: (1)承受汽车的重量; (2)承受并缓和汽车行驶时由路面通过车轮传给车身的冲击与振动; (3)在承受制动力、驱动力和转弯时产生的离心力时,要保证操纵的稳定性:
汽车2自由度和7自由度动力学建模仿真#精选.
1 路面模型的建立 在分析主动悬架控制过程时,路面输入是一个不可忽略的重要因素,本文利用白噪声信号为路面输入激励, )(2)(2)(0 00t w U G t x f t x g g ππ+-=? 其中,0f 为下截止频率,Hz ;G 0为路面不平度系数,m 3/cycle ;U 0为前进车速,m/sec ;w 为均值为零的随机输入单位白噪声。上式表明,路面位移可以表示为一随机滤波白噪声信号。这种表示方式来源于试验所测得的路面不平度功率谱密度(PSD )曲线的形状。我们可以将路面输入以状态方程的形式加到模型中: ???? ?=+=? X C Y W F X A X road road road road road 1,2,2,000==-==road road road g road C U G B f A x X ππ;D=0;考虑路面为普通路面,路面不平系数G 0=5e-6m 3/cycle ;车速U 0=20m/s ;建模中,路面随机白噪声可以用随机数产生(Random Number )或者有限带宽白噪声(Band-Limited White Noise )来生成。本文运用带宽白噪声生成,运用MATLAB/simulink 建立仿真模型如下: 图1 路面模型 2 汽车2自由度系统建模 图2 汽车2自由度系统模型
根据图2所示,汽车2自由度系统模型,首先建立运动微分方程: ()()()()()b b s b w s b w w w t w g s b w s b w m x K x x C x x m x K x x K x x C x x =----???=--+-+-?? 整理得: ?????? ?+--+-+-+-=-+-+-+-=g w t b w t s b w s b w s b w s w b b s b b s w b s b s b x m K x m K K x m K x m C x m C x x m K x m K x m C xb m C x 式中:s C 为悬架阻尼,s K 为悬架刚度,t K 为轮胎刚度,b m 为车身质量,w m 为 车轮质量,b b b x x x 、、分别为车身位移、速度、加速度,w w w x x x 、、分别为车轮位移、速度、加速度,g x 为路面输入。 选取状态变量和输入向量为: []w b w b x x x x X = g x U = 则可将系统运动方程及路面激励写成状态空间矩阵形式,即: BU AX X += 其中,A 为状态矩阵,B 为输入矩阵,其值如下: ?????? ?? ? ?????????---- -=00 1 0001w s s w s w s w s b s b s b s b s m K K m K m C m C m K m K m C m C A ???? ??????????=000w t m K B 将车身加速度、轮胎动变形、悬架动行程作为性能指标,即: T w b g w b x x x x x Y ][--= 将性能指标项写为状态变量以及输入信号的线性组合形式,即: DU CX Y += 其中: