道路SIR-20雷达数据分析指导

道路雷达数据分析指导
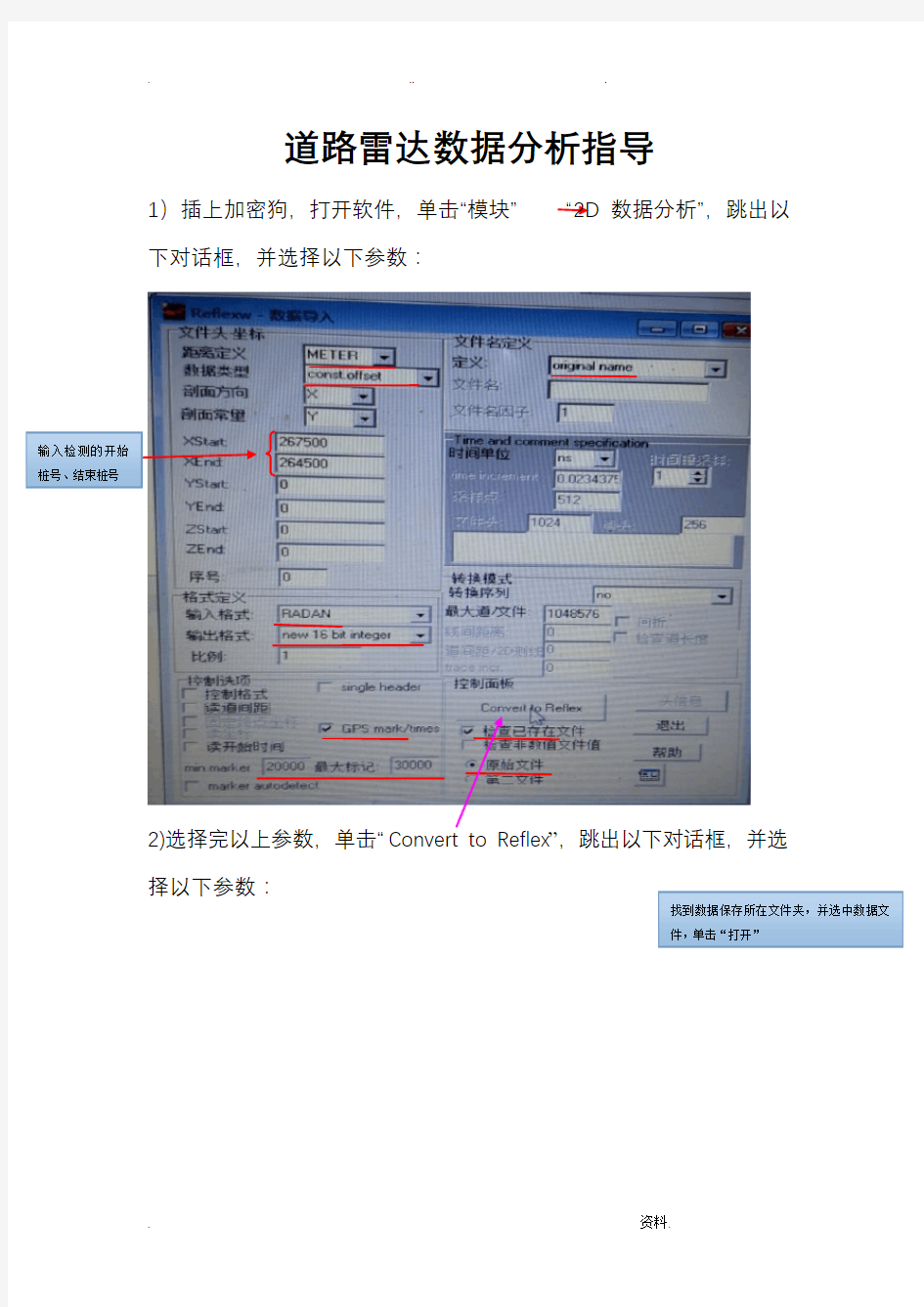
1)插上加密狗,打开软件,单击“模块”“2D数据分析”,跳出以
下对话框,并选择以下参数:
输入检测的开始
桩号、结束桩号
2)选择完以上参数,单击“
择以下参数:
找到数据保存所在文件夹,并选中数据文
件,单击“打开”
3)在以下对话框中,单击“文件”“编辑文件头”,记录下“道间距两个参数,如:0.1998 15015。
4)在已导入数据的软件里寻找检测时候所做的标记,检查是否与检测记录表上所记录的一致,应逐个对比桩号位置。单击“处理”
“道插值/重插值”。
5)在“道插值/重插值”对框在选择以下参数,并单击“开始”:
6)对空气层进去切除,在分析数据的软件里单击“拾取” “连续拾取”
表示共有
5个标记
此数值表示第1个标记到第2个标记距离1500m
同上,以此类推
此数值表示检测总长度,为3000m ,应与检测记录相附
在控件组1,输入第3步查找到道间距参数
第3步查找到道间距参数,应与此数值相附。如结束检测时没做标记,则应在最后输入道间距参数,且检测总长度也应与检测记录的长度测相附
选择0即可
“自动拾取”,如对话框所示:
当单击了“自动拾取”,会跳出以下对话框:
选出空气层与
路面层的交界
后,单击“开始”
如上图所示选择参数,单击“开始”后,应对“分层线”进检查,检查是
否信号有无漂移现象,并对其进行修正,最后保存,如下图:
7)“处理” “静校正/切除”,如下图所示,并选择相应参数后,单击“开始”:
分层线
选1即可
可选0.1
输入文件名
此处应为1
空气层
路面层
8)“处理”“增益”,如下图所示,并选择相应参数后,单击“开始”:
9)“处理”“2D滤波”,如下图所示,并选择相应参数后,单击“开始”:
10)“处理”“1D滤波”,如下图所示,并选择相应参数后,单击“开始”:此处应为2
通过增大或减小此数值来确保“滤波后”的波形图图刚好在“滤波后”的图框内即可
此处应为3
“2D 滤波”,选择第1个“running average ”选项,参数 ,处理标签应为5,单击“开始”。
12)通过钻芯取样得出的若干个厚度数与相对应的位置转波时间计算出该标段或评定段的转波速度(取平均值),最后可通过反算计算各点的误差值。
13)重复第6步的步骤,抽取出所需要的层厚,保存时在“平均(层)速度”栏输入通过计算得出的标段或评定段的转波速度,如下图参数。
此处应为4
低通选择800即可(公路检测选用2G 天线,选用天线一半以下即可)
高通选择3000即可(公路检测选用2G 天线,大于天线1000即可)
3
13)进行生成,单击图标,并选择相应参数后,单击“开始”:
增量选1即可
拾取第12步保存的数据文件
输入要保存的文件名
增量5
14)生成报表厚度、速度、时间、mm输出,
平均1
最后生成报表,并保存。
15)将数据导入Exell表格,跟据业主要求,或将桥涵的异常数据踢除,即可。
回弹仪数据处理软件用户手册V10
回弹仪数据处理软件
(V1.0)
用户操作手册
中测科仪(北京)科技有限公司
https://www.360docs.net/doc/d71297575.html,/
回弹仪数据处理软件用户手册 1. 关于本手册 ............................. 错误!未定义书签。
1.1. 本手册的内容 ....................... 错误!未定义书签。 1.2. 本手册的声明和条款 ................. 错误!未定义书签。 1.2.1. 免责声明 ...................... 错误!未定义书签。 1.2.2. 警告及注意事项................. 错误!未定义书签。 2. 概述................................... 错误!未定义书签。
2.1. 软件简介 ........................... 错误!未定义书签。 2.2. 升级服务 ........................... 错误!未定义书签。 2.3. 客户技术服务 ....................... 错误!未定义书签。 3. 安装与卸载 .............................................. 1
3.1. 系统安装要求 ........................................ 1 3.1.1. 硬件环境要求 ................................... 1 3.1.2. 操作系统要求 ................................... 1 3.2. 软件安装步骤 ........................................ 1 3.2.1. 安装向导 ....................................... 1 3.2.2. 欢迎界面 ....................................... 1 3.2.3. 许可证协议 ..................................... 2 3.2.4. 安装路径 ....................................... 2 3.2.5. 安装进度 ....................................... 2 3.2.6. 完成安装 ....................................... 2 3.2.7. 软件升级 ...................... 错误!未定义书签。 3.2.8. 软件卸载 ....................................... 3 4. 软件登录与主要功能介绍 .................................. 4
4.1. 软件特点 ............................................ 4 4.1.1. 使用方便 ....................................... 4 4.1.2. 功能齐全 ....................................... 4 4.1.3. 数据安全可靠 ................................... 4 4.1.4. 数据存储 ....................................... 4 4.1.5. 服务相应及时 ................................... 4 4.2. 软件登录及界面介绍 .................................. 4 4.2.1. 开启画面 ....................................... 5 4.2.2. 系统登录 ....................................... 5
雷达大数据处理步骤及效果展示
雷达数据处理步骤及效果展示 一、隧道衬砌质量检测数据处理步骤 1、打开软件RADAN,选择文件夹View→Customize→Directories; 2、打开文件File→Open(*.dzt); 3、扫描信息预编辑:选择一段扫描剖面,切除多余扫描信息Cut,保存特定扫描剖面; 4、文件测量方向反转:打开文件,选择File→Save As ,打勾,另存; 5、距离信息编辑:(1)编辑文件头内的距离信息Edit→File Header, 扫描/ 米[scans/m], 米/标记[m/mark],(2)编辑用户标记,(3)距离归一化处理; 6、里程编辑:Edit→File Header →3D option→X start输入里程起点坐标; 7、水平幅度调整:Process→Horizontal scale(叠加stacking、抽道skipping、加密stretching); 8、调整地面反射信号位置:方法有两种,(1)Edit→File Header→position(ns),(2)Process→Correct Position→delta pos (ns); 9、介电常数调整:利用经验或钻孔获得介电常数,通过Edit→File Header→DielConstant调整; 10、增益调整:Process→Range Gain,增益点数易选5个; 11、水平滤波:Process→FIR Filter; 12、背景去除:Process→FIR Filter; 13、一维频率滤波Process→IIR Filter; 14、反褶积、一维频率滤波:Process→Deconvolution;Process→IIR Filter; 15、文件拼接:选择File→Append files;
激光雷达高速数据采集系统解决方案
激光雷达高速数据采集系统解决方案 0、引言 1、 当雷达探测到目标后, 可从回波中提取有关信息,如实现对目标的距离和空间角度定位,并由其距离和角度随时间变化的规律中得到目标位置的变化率,由此对目标实现跟踪; 雷达的测量如果能在一维或多维上有足够的分辨力, 则可得到目标尺寸和形状的信息; 采用不同的极化方法,可测量目标形状的对称性。雷达还可测定目标的表面粗糙度及介电特性等。接下来坤驰科技将为您具体介绍一下激光雷达在数据采集方面的研究。 1、雷达原理 目标标记: 目标在空间、陆地或海面上的位置, 可以用多种坐标系来表示。在雷达应用中, 测定目标坐标常采用极(球)坐标系统, 如图1.1所示。图中, 空间任一目标P所在位置可用下列三个坐标确定: 1、目标的斜距R; 2、方位角α;仰角β。 如需要知道目标的高度和水平距离, 那么利用圆柱坐标系统就比较方便。在这种系统中, 目标的位置由以下三个坐标来确定: 水平距离D,方位角α,高度H。 图1.1 用极(球)坐标系统表示目标位置
系统原理: 由雷达发射机产生的电磁能, 经收发开关后传输给天线, 再由天线将此电磁能定向辐射于大气中。电磁能在大气中以光速传播, 如果目标恰好位于定向天线的波束内, 则它将要截取一部分电磁能。目标将被截取的电磁能向各方向散射, 其中部分散射的能量朝向雷达接收方向。雷达天线搜集到这部分散射的电磁波后, 就经传输线和收发开关馈给接收机。接收机将这微弱信号放大并经信号处理后即可获取所需信息, 并将结果送至终端显示。 图1.2 雷达系统原理图 测量方法 1).目标斜距的测量 雷达工作时, 发射机经天线向空间发射一串重复周期一定的高频脉冲。如果在电磁波传播的途径上有目标存在, 那么雷达就可以接收到由目标反射回来的回波。由于回波信号往返于雷达与目标之间, 它将滞后于发射脉冲一个时间tr, 如图1.3所示。 我们知道电磁波的能量是以光速传播的, 设目标的距离为 R, 则传播的距离等于光速乘上时间间隔, 即2R=ct r 或 2 r ct R
数据分析与可视化知识分享
数据分析与可视化
数据分析与可视化 1.什么是数据分析? 数据分析是基于商业目的,有目的的进行收集、整理、加工和分析数据,提炼有价信 息的一个过程。其过程概括起来主要包括:明确分析目的与框架、数据收集、数据处理、 数据分析、数据展现和撰写报告等6个阶段。 1、明确分析目的与框架 一个分析项目,你的数据对象是谁?商业目的是什么?要解决什么业务问题?数据分 析师对这些都要了然于心。基于商业的理解,整理分析框架和分析思路。例如,减少新客 户的流失、优化活动效果、提高客户响应率等等。不同的项目对数据的要求,使用的分析 手段也是不一样的。 2、数据收集 数据收集是按照确定的数据分析和框架内容,有目的的收集、整合相关数据的一个过 程,它是数据分析的一个基础。 3、数据处理 数据处理是指对收集到的数据进行加工、整理,以便开展数据分析,它是数据分析前 必不可少的阶段。这个过程是数据分析整个过程中最占据时间的,也在一定程度上取决于 数据仓库的搭建和数据质量的保证。 数据处理主要包括数据清洗、数据转化等处理方法。 4、数据分析 数据分析是指通过分析手段、方法和技巧对准备好的数据进行探索、分析,从中发现 因果关系、内部联系和业务规律,为商业目提供决策参考。 到了这个阶段,要能驾驭数据、开展数据分析,就要涉及到工具和方法的使用。其一 要熟悉常规数据分析方法,最基本的要了解例如方差、回归、因子、聚类、分类、时间序 列等多元和数据分析方法的原理、使用范围、优缺点和结果的解释;其二是熟悉1+1种数据分析工具,Excel是最常见,一般的数据分析我们可以通过Excel完成,后而要熟悉一个专业的分析软件,如数据分析工具SPSS/SAS/R/Matlab等,便于进行一些专业的统计分析、数据建模等。 5、数据展现 一般情况下,数据分析的结果都是通过图、表的方式来呈现,俗话说:字不如表,表 不如图。借助数据展现手段,能更直观的让数据分析师表述想要呈现的信息、观点和建 议。 常用的图表包括饼图、折线图、柱形图/条形图、散点图、雷达图等、金字塔图、矩 阵图、漏斗图、帕雷托图等。 6、撰写报告
数据库期末考试名词解释
1. 概念模式 是数据库中全部数据的整体逻辑结构的描述。它由若干个概念记录类型组成。概念模式不仅要描述概念记录类型,还要描述记录间的联系、操作、数据的完整性、安全性等要求。? 2. X封锁 如果事务T对数据R实现X封锁,那么其他的事务要等T解除X封锁以后,才能对这个数据进行封锁。只有获准X封锁的事务,才能对被封锁的数据进行修改。? 3. 复制透明性 即用户不必关心数据库在网络中各个结点的数据库复制情况,更新操作引起的波及由系统去处理。 4. 主属性 包含在任何一个候选键中的属性。 5. 事务的原子性 一个事务对数据库的操作是一个不可分割的操作系列,事务要么完整地被全部执行,要么全部不执行。 1. DML 数据操纵语言(Data Manipulation Language),由DBMS提供,用于让用户或程序员使用,实现对数据库中数据的操作。DML分成交互型DML和嵌入型DML两类。依据语言的级别,DML 又可分成过程性DML 和非过程性DML两种。 2. S封锁 共享型封锁。如果事务T对某数据R加上S封锁,那么其它事务对数据R的X封锁便不能成功,而对数据R的S封锁请求可以成功。这就保证了其他事务可以读取R但不能修改R,直到事务T释放S封锁。? 3. 分布式DBS 是指数据存放在计算机网络的不同场地的计算机中,每一场地都有自治处理能力并完成局部应用; 而每一场地也参与(至少一种)全局应用程序的执行,全局应用程序可通过网络通信访问系统中的多个场地的数据。 4.事务 数据库系统的一个操作系列,这些操作或者都做,或者都不做,是一个不可分割的工作单位 5. 丢失更新 当两个或以上的事务同时修改同一数据集合时,由于并发处理,使得某些事务对此数据集合的修改被忽视了. 1. 实体完整性规则 这条规则要求关系中元组在组成主键的属性上不能有空值。如果出现空值,那么主键值就起不了唯一标识元组的作用。 1. 域和元组 在关系中,每一个属性都有一个取值范围,称为属性的值域,简称域;记录称为元组。元组对应表中的一行;表示一个实体。? 2. 无损联接 设R是一关系模式,分解成关系模式ρ={R1,R2...,Rk},F是R上的一个函数依赖集。如果对R中满足 F 的每一个关系r都有r=πR1(r)πR2(r)... πRk(r)则称这个分解相对于F 是"无损联接分解"。 3. 事务的原子性?
地震数据处理vista软件使用手册
Vista 5.5的基本使用方法 数据输入 地震分析窗口 一维频谱 二维频波谱 观测系统 工作流 一、数据输入 1.1 把数据文件加入Project 首先选择File/New Project,新建一个Project,按住不放,出现按钮组合,可以选择不同类型 的数据集,选择,向Project中增加一个新的2-D数据集,按住不放,出现按钮组合, 可以选择加入不同类型的地震数据,选择,选择一个SEG-Y数据,即可将该数据文件加入新建的数据集。 1.2 命令流中数据的输入 双击进入如下界面 1.2.1 Input Data List 数据输入列表,选择已加入到Project的数据集,下面的文本框中会显示选择的数据的基本信息。 1.2.2 Data Order 选择输入数据的排列方式,对不同的处理步骤可以选择不同的数据排列方式 Sort Order a. NO SORT ORDER 输入数据原始排列方式 b. SHOT_POINT_NO 输入数据按炮点排列方式 c. FIELD_STATION_NUMBER d. CMP_NO 输入数据按共中心点排列方式 e. FIELD_STATION_NUMBER 1.2.3 Data Input Control 数据输入控制 右键-->Data Input Control a. Data Input 进入Flow Input Command(见上) b. Data Sort List 查看数据排列方式的种类 c. Data/header Selection 输入数据的选择,可以控制输入数据的道数和CMP道集 查看所有已经选择的数据 如果没有定义任何可选的数据信息,则如下图所示: 可以选择一种选择方式,单击并设置选择信息。定义有可选的数据信息后,在查看,则如下图所示,会显示选择的信息。 选择共炮点集 单击后,会弹出如下界面:
数据挖掘中的名词解释
第一章 1,数据挖掘(Data Mining),就是从存放在数据库,数据仓库或其他信息库中的大量的数据中获取有效的、新颖的、潜在有用的、最终可理解的模式的非平凡过程。 2,人工智能(Artificial Intelligence)它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器。 3,机器学习(Machine Learning)是研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能,重新组织已有的知识结构使之不断改善自身的性能。 4,知识工程(Knowledge Engineering)是人工智能的原理和方法,对那些需要专家知识才能解决的应用难题提供求解的手段。 5,信息检索(Information Retrieval)是指信息按一定的方式组织起来,并根据信息用户的需要找出有关的信息的过程和技术。 6,数据可视化(Data Visualization)是关于数据之视觉表现形式的研究;其中,这种数据的视觉表现形式被定义为一种以某种概要形式抽提出来的信息,包括相应信息单位的各种属性和变量。 7,联机事务处理系统(OLTP)实时地采集处理与事务相连的数据以及共享数据库和其它文件的地位的变化。在联机事务处理中,事务是被立即执行的,这与批处理相反,一批事务被存储一段时间,然后再被执行。 8, 联机分析处理(OLAP)使分析人员,管理人员或执行人员能够从多角度对信息进行快速 一致,交互地存取,从而获得对数据的更深入了解的一类软件技术。8,决策支持系统(decision support)是辅助决策者通过数据、模型和知识,以人机交互方式进行半结构化或非结构化决策的计算机应用系统。它为决策者提供分析问题、建立模型、模拟决策过程和方案的环境,调用各种信息资源和分析工具,帮助决策者提高决策水平和质量。 10,知识发现(KDD:Knowledge Discovery in Databases)是从数据集中别出有效的、新颖的、潜在有用的,以及最终可理解的模式的非平凡过程。 11,事务数据库(Transaction Database)一个事务数据库由文件构成,每条记录代表一个事务。 典型的事务包含唯一的事务标记,多个项目组成一个事务 12,分布式数据库(Distributed Database)是用计算机网络将物理上分散的多个数据库单元连接起来组成一个逻辑统一的数据库。 第三章 13,并行关联规则挖掘(Parallel Association Rule Mining)是指利用并行处理机,使用挖掘算法或在并行计算的环境下完成数据的高效挖掘工作。 14,数量关联规则挖掘(Quantitive Association Rule Mining)对含有非离散的数值属性的数据进行挖掘的技术 14, 频繁项目集(Frequent Itemsets)对项目集I和事务数据库D,T中所有满足用户指定的最小支持度(Minsupport)的项目集,即大于或等于Minsupport的I的非空子集 15,最大频繁项目集(Maximum Frequent Itemsets)在频繁项目集中挑选出所有不被其他元素包含的频繁项目集 16,闭合项目集(Close Itemset)如果项目的直接超集都不具有和它相同的支持度技术则该项目是闭合的 17,多层次关联规则:具有概念分层的关联规则挖掘产生的规则称为多层关联规则。 18,多维关联规则:在关联规则中的项或属性每个涉及多个维,则它就是多维关联规则。
数据可视化:柱状图、雷达图等六种基本图表的特点和适用场合
数据可视化:柱状图、雷达图等六种基本图表的特点和适用场合2014-11-30数据挖掘与数据分析 “数据可视化”可以帮助用户理解数据,一直是热门方向。 图表是”数据可视化”的常用手段,其中又以基本图表—-柱状图、折线图、饼图等等—-最为常用。 用户非常熟悉这些图表,但如果被问道,它们的特点是什么,最适用怎样的场合(数据集)?恐怕答得上来的人就不多了。 本文是电子书《Data Visualization with JavaScript》第一章的笔记,总结了六种基本图表的特点和适用场合,非常好地回答了上面的问题。
序言 进入正题之前,先纠正一种误解。 有人觉得,基本图表太简单、太原始,不高端,不大气,因此追求更复杂的图表。但是,越简单的图表,越容易理解,而快速易懂地理解数据,不正是”数据可视化”的最重要目的和最高追求吗? 所以,请不要小看这些基本图表。因为用户最熟悉它们,所以只要是适用的场合,就应该考虑优先使用。 一、柱状图(Bar Chart) 柱状图是最常见的图表,也最容易解读。 它的适用场合是二维数据集(每个数据点包括两个值x和y),但只有一个维度需要比较。年销售额就是二维数据,”年份”和”销售额”就是它的两个维度,但只需要比较”销售额”这一个维度。 柱状图利用柱子的高度,反映数据的差异。肉眼对高度差异很敏感,辨识效果非常好。柱状图的局限在于只适用中小规模的数据集。
通常来说,柱状图的X轴是时间维,用户习惯性认为存在时间趋势。如果遇到X 轴不是时间维的情况,建议用颜色区分每根柱子,改变用户对时间趋势的关注。 上图是英国足球联赛某个年度各队的赢球场数,X轴代表不同球队,Y轴代表赢球数。 二、折线图(Line Chart)数据 折线图适合二维的大数据集,尤其是那些趋势比单个数据点更重要的场合。
数据分析系统—用户操作手册
数据分析系统 操作手册 目录 一、前言 (2) 1.1、编写目的 (2) 1.2、读者对象 (2) 二、系统综述 (3) 2.1、系统架构 (3) 2.1.1系统浏览器兼容 (3) 三、功能说明 (4) 3.1、登录退出 (4) 3.1.1、登录 (4) 3.1.2、退出 (4) 3.1.3、用户信息 (5) 3.2、仪表盘 (5) 3.2.1、报表选择 (6) 3.2.2、布局方式 (7) 3.2.3、仪表盘管理 (8) 3.2.4、单个报表 (10) 3.3、应用中心 (13) 3.3.1、数据搜索 (13) 3.4、策略配置 (39)
3.4.1、数据采集 (39) 3.4.2、报表 (46) 3.4.3、数据类型 (53) 3.4.4、预设搜索 (58) 3.5、系统管理 (61) 3.5.1、代理注册设置 (61) 3.5.2、用户角色 (62) 3.5.3、系统用户 (65) 四、附件 (67) 一、前言 1.1、编写目的 本文档主要介绍日志分析系统的具体操作方法。通过阅读本文档,用户可以熟练的操作本系统,包括对服务器的监控、系统的设置、各类设备日志源的配置及采集,熟练使用日志查询、日志搜索功能,并掌握告警功能并能通过告警功能对及日志进行定位及分析。 1.2、读者对象 系统管理员:最终用户
项目负责人:即所有负责项目的管理人员 测试人员:测试相关人员 二、系统综述 2.1、系统架构 系统主界面为所有功能点的入口点,通过主菜单可快速定位操作项。系统主要分为四大模块,分别为 1):仪表盘 2):应用中心 3):策略配置 4):系统管理 2.1.1系统浏览器兼容 支持的浏览器 IE版本IE8至IE11等版本 Chrome 36及以上版本 Google chrome(谷歌 浏览器) Firefox 30及以以上版本 Mozilla Firefox (火 狐浏览器)
数据处理内容.
数据处理内容 1.标准曲线 作标准曲线时,对于可控性差的实验,可点数应多一些;对于可控性较的实验,取点数可少一些,但不应少于五个点。 r值应根据具体实验的要求,既要满足特定实验的要求,又不能过分人为的提高r值。 标准曲线完成后,检测样品时,测定值应落在标准曲线范围内。 2.有效数字 有效数字的保留应根据实验仪器的有效数字确定。 文字叙述中数字的表达应严谨,比如“精确称取2g样品”是一种典型错误,应表达为“精确称取2.0000g样品”,以表示所用天生秤为万分天秤。 再比如,1mL移液管的读数应为“0.683mL”,而不是“0.68mL”。 3.实验数据处理 实验数据的重复数应根据实验本身的要求决定。 对于可控性较差的实验,实验数据的重复数应增加;对于可控性较好的实验,实验数据的重复数可相应减少,但最少不应少于3个。 实验数据的表示方法应以“平均值(X)±标准差(SD)”表示,数据间应进行显著性分析,并标示出显著性水平和实验的重复数。比如: 表1 多酚对小鼠游泳竭耗实验的影响结果(X±SD) Table 1 Effects of polyphenol on swimming time of mice(X±SD) Group n Swimming time (s) Increase rate(%) 1 10 181.1±58.1 — 2 10 266.2±76.0ac47.0 3 10 354.7±103.9b95.9 4 10 261.7±62.1ac44.5
注:a:P<0.05,b :P<0.001,与1组相比较;c:P<0.05,与3组相比较 Note: a: P<0.05, b: P<0.001, compared with 1 group; c: P<0.05, compared with 3 group 对于表格中数字的描述也应标示其显著性水平。比如“第3组和第1组间有极著性差异”的说法是不完整的,应为“第3组和第1组间有极显著性差异(P<0.001)”。 对于正交实验,应根据极差分析和方差分析的结果综合考虑,以决定最终的结论,而不应只根据极差分析结果就得出结论。 对于论文中的图表应进行适当的说明,不应只把图表放在论文上,而不做任何说明。
雷达信号处理和数据处理
脉冲压缩雷达的仿真脉冲压缩雷达与匹配滤波的MATLAB仿真 姓名:-------- 学号:---------- 2014-10-28 - 0 - 西安电子科技大学
一、雷达工作原理 雷达,是英文Radar的音译,源于radio detection and ranging的缩写,原意为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。利用电磁波探测目标的电子设备。发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。 雷达发射机的任务是产生符合要求的雷达波形(Radar Waveform),然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由接收机接收,对雷达回波信号做适当的处理就可以获知目标的相关信息。 但是因为普通脉冲在雷达作用距离与距离分辨率上存在自我矛盾,为了解决这个矛盾,我们采用脉冲压缩技术,即使用线性调频信号。 二、线性调频(LFM)信号 脉冲压缩雷达能同时提高雷达的作用距离和距离分辨率。这种体制采用宽脉冲发射以提高发射的平均功率,保证足够大的作用距离;而接受时采用相应的脉冲压缩算法获得窄脉冲,以提高距离分辨率,较好的解决雷达作用距离与距离分辨率之间的矛盾。 脉冲压缩雷达最常见的调制信号是线性调频(Linear Frequency Modulation)信号,接收时采用匹配滤波器(Matched Filter)压缩脉冲。 LFM信号的数学表达式: - 1 -
- 2 - (2.1) 其中c f 为载波频率,()t rect T 为矩形信号: ( 2.2) 其中B K T =是调频斜率,信号的瞬时频率为()22c T T f Kt t + -≤≤,如图 (图2.1.典型的LFM 信号(a )up-LFM(K>0)(b )down-LFM(K<0)) 将式1改写为: (2.3) 其中
数据处理名词解释
名词解释: 第一章 试验设计与数据处理:是以概率论、数理统计及线性代数为理论基础,研究如何有效的安排试验、科学的分析和处理试验结果的一门科学。 试验考察指标(experimental index):依据试验目的而选定的衡量或考察试验效果的特征值. 试验因素;对特征值产生影响的原因或要素. 因素水平:试验实际考虑采用的(某一)因素变化的状态或条件的种类数称为因素水平,简称水平。 局部控制(local control)原则:控制隐藏变量对反应的效应。 重复(replication)原则:重复试验于许多试验单位,以降低结果的机会变异 随机化(randomization)原则:随机化(Randomization)安排试验单位接受指定的处理。实验的目标特性(实验考察指标)目标特性:就是考察和评价实验结果的指标。 定量指标:可以通过实验直接获得,便于计算和进行数据处理。 定性指标:不易确定具体的数值,为便于用数学方法进行分析和处理,必须是将其数字化后进行计算和处理。 因素:凡是能影响实验结果的条件或原因,统称为实验因素(简称为因素)。 水平:因素变化的各种状态和条件称为因素的水平 总体、个体:我们所研究对象的某特性值的全体,叫做总体,又叫母体;其中的每个单元叫做个体。 子样(样本)、样本容量:自总体中随机抽出的一组测量值,称为样本,又叫子样。样本中所含个体(测量值)的数目,叫做样本容量,即样本的大小。 抽样:从总体中随机抽取若干个个体观测其某种数量指标的取值过程称为抽样。 样本空间:就样本而言,一次抽取、观测的结果是n个具体数据x1,x2,…,xn,称为样本(X1,X2,…X n)的一个观测值,而样本观测值所有可能取值的全体称为样本空间。 重复性:由一个分析者,在一个给定的实验室中,用一套给定的仪器,在短时间内,对某物理量进行反复定量测量所得的结果。也称为室内精密度。 再现性;由不同的实验室的不同分析者和仪器,共同对一个物理量进行定量测量的结果。也称室间精密度。 误差:测量值和真值的差数 偏差:测量值和平均值的差数。也叫离差。 偏差平方和:测量值对平均值的偏差的平方的加和,叫偏差平方和。 方差(variance):是测量值在其总体均值周围分布状况的一种量度,方差表征随机变量分布的离散程度。 总体方差的定义是:测量值对总体均值的误差的平方的统计平均 样本方差:只作过有限次测量的样本方差,通常用s2表示。s2是测量值对样本均值的偏差的平方的平均 标准偏差(标准差):方差的平方根的正值,叫标准偏差,或标准差 自由度:是指可以自由取值的数据的个数。 相对标准偏差(变异系数)(relative standard deviation, RSD):是样本标准偏差与平均值的比值,表示偏差值与平均值的相对大小。 第二章
地面雷达数据处理系统设计
地面雷达数据处理系统设计 摘要:针对目前地面雷达数据处理中存在的目标多,机动性强,地面杂波强,虚警率高等问题,采用并设计了解速度模糊、点迹凝聚、航迹处理等算法,结合软件编程技术,对信号处理后的数据进行综合处理,经过雷达外场鉴定试验测试,数据处理使雷达的发现概率、虚警率、方位距离精度、速度分辨力等指标各提高了约十个百分点。 0 引言 数据处理作为雷达系统的一个重要组成部分,可以看成是雷达信号处理的后处理过程,可以对信号处理后的数据进行筛选,并且从零星探测的小目标进行综合分析,消除由杂波、虚假目标、干扰目标、诱饵目标等造成的虚假检测,提高对目标的发现概率,降低虚警率,对目标建立航迹,并预测目标运动方向、位置的后果,其精度和可靠性都高于雷达的一次观测,改善雷达信号处理结果,使雷达的使用价值和性能得以提高。 早期的雷达数据处理方法有最小二乘法、现代滤波理论、Kalman滤波、机动目标跟踪方法等。目前对雷达数据处理的研究,特别是航迹处理部分,大多都是对付空中目标和海上目标的,这样的目标机动性不强,背景简单,容易预测航迹。而地面目标具有强机动性、情况复杂、目标种类繁多、同一范围内目标遮挡等环境干扰因素较多,这些对目标的检测、归并、凝聚、建航都提出了高的要求。需要对以前在航空和航海领域应用较多的航迹处理方法进行发展和完善,发展出适合强机动目标的改良算法。 随着信息技术的发展,雷达数据处理的研究有以下几个发展方向:弱小目标的自动跟踪,可利用帧间滤波、检测前跟踪和先进算法来提升自动跟踪性能;高速计算与并行处理;多传感器信息融合与控制一体化;搜索、跟踪、引导、识别与指挥一体化。 1 数据处理的系统设计 雷达数据处理采用计算机作为载体,通过编写数据处理软件来实现,计算机能够非常灵活地完成各种类型的数据处理工作;数据处理的软件化也能使整个雷达系统的兼容性和可扩展性更强,功能更完善,界面更友好。 数据处理软件完成的功能主要包括:采集数据(信号处理的目标数据、定北数据、定位数据),对信号处理后的目标数据进行格式转换、点迹凝聚等优选目标数据后形成更加准确、精确的目标点迹数据;对点迹数据进行航迹处理后形成目标的航迹;把处理后的目标点迹、航迹数据进行输出。数据处理功能。 在研究和参考已有雷达数据处理算法的基础上,对模拟目标数据、同类型其他雷达试验中录取的实际目标数据进行了仿真处理,根据处理结果,对已有算法进行修改完善,以适用本雷达技术特点和指标的要求。 2 点迹形成的算法设计 由于雷达波束在连续扫描时,波束波瓣有一定宽度,至少有好几个脉冲连续扫到目标,每个脉冲都对应一个方位值,同一目标被捕捉到多次,多次捕获目标时的方位值都不同,这就造成了方位角的分裂程度较大。因此需要把一次扫描中同一目标的多个点迹凝聚成一个点迹。先在距离上进行凝聚,得到水平波瓣内不同方位上的距离值;再在方位上凝聚,可获得惟一方位估计值;然后把距离值进行线性内插获得惟一的距离估计值。 (1)同一目标在距离上的凝聚处理,需将在距离上连续或间隔一个量化单元的点迹按照式(1)求取质心,将质心作为目标点迹的距离估计值: 式中:n为目标的点迹个数;Ri,Vi分别为第i个目标点迹的距离和回波幅度值。 (2)同一目标在方位上的凝聚处理,需将在方位上相邻的点迹按照式(2)求取质心,将质心作
专业雷达数据分析模块
专业雷达数据分析模块 PCI Geomatica 高级SAR数据滤波:包括增强的Frost, Lee, Kuan 滤波功能 极化SAR数据分析:读取、分析并校准JPL aircraft SAR Stokes和散射矩阵数据. SAR 数据校准:包括生产校准的后向散射系数和雷达亮度。 SAR 数据分析:包括特征提取和变化检测 EarthView 产品系列 EarthView 套装软件提供从航天SAR数据生成高质量影像、DEM及变形图的完整的软件包。套装软件目前由四个产品组成: 1) EarthView APP v3.1 -- 完整解释为The Advanced Precision Processor,可将原始航天SAR数据转换为高质量影像产品。 2) EarthView InSAR v3.1 -- 干涉测量工作站可从处理的航天SAR影像生成DEM及变形图。CTM模块-- EarthView InSAR v3.1新增了CTM模块,CTM InSAR用来对连续性的目标进行变化监测。 3) EarthView Hypac -- 高光谱处理软件包,用来进行大数据量的高光谱图像处理。 4) EarthView Stereo v3.1 -- 三维模块应用一对SAR影像,生成区域的数字地形高程模型。产品特点 Atlantis致力于现代化其生产线,提供新水平的集成与交互操作能力、改进的易用性、常用的“look and feel”、对所有支持平台的可移植性。产品的几个主要特点包括: 1) 采用多CPU增强生产的能力; 2) 更新的生产“look and feel”以确保直观的版面、更新的设计及改进的交互生产连贯性; 3) 新的借助于硬件加速能力的可视化技术; 4) 简化的安装和授权程序; 5) 教育版,包含所有操作模式,但只支持有限数量的训练数据(注意教育版只能在Windows NT/2000下操作)。
数据处理总结
第一章 本课程的主要内容 一、资料的整理及统计分析 平均数 标准差 标准误 二、显著性检验 1. 平均数间差异显著性检验 2. F 检验法 三、相关与回归 四、试验设计 五、Excel 、DPS 统计软件系统 常用术语 1. 总体与样本 总体( polulation )是指根据研究目的确定的、符合指定条件的研究对象的全体。它是由相同性质的(个体)成员所构成的集团。样本( sample )是指从总体中抽取一定数量的个体所组成的集合。 2. 参数与统计量 参数( parameter )是指由总体计算的用来描述总体的特征性数值。它是一个真值,通常用希腊字母表示。如总体 平均数以□表示,总体标准差以b表示。 统计量( statistics )是指由样本计算的用来描述样本的特征性数值。 3. 误差与错误
误差( error )是指试验中由无法控制的非试验因素所引起的差异。它是不可避免的,试验中只能设法减少,而不能 消除。 错误( mistake )是指试验过程中人为的作用所引起的差错,在试验中完全可以避免。 4. 精确性与准确性 精确性( precision )是指试验或调查中同一试验指标或性状的重复观察值彼此的接近程度。 准确性( accuracy )是指试验或调查中某一试验指标或性状的观察值(统计量)与真值(或总体参数)之间的接近程度。 5. 试验指标 在某项试验设计中,用来衡量试验效果的特征量称为试验指标,也称试验结果。试验指标可分为定量指标和定性指标两类。 6. 试验因素试验中对试验指标可能产生影响的原因或要素称为试验因素,也称为因子。 7. 因素水平试验中试验因素所处的各种状态或取值称为因素水平,简称水平。 8. 试验处理试验中各试验因素的水平所形成的一种具体组合方式称为试验处理,简称处理,是在试验单位上的一种具体实现。 9. 试验单位 在试验中能接受不同试验处理的试验载体叫做试验单位。 10. 重复 在一项试验中,将1 个处理在两个或两个以上的试验单位上实施的称为重复。1 个处理所实施的试验单位数称为处理的重复数,或者说某个水平组合重复n 次试验,这个处理的重复数就是n。 试验设计应遵循的基本原则重复随机化局部控制第二章 第一节样品的采集与前处理 一、资料的来源 经常性记录 试验研究记录 调查记录
数据分析与可视化
数据分析与可视化 1.什么是数据分析? 数据分析是基于商业目的,有目的的进行收集、整理、加工和分析数据,提炼有价信息的一个过程。其过程概括起来主要包括:明确分析目的与框架、数据收集、数据处理、数据分析、数据展现和撰写报告等6个阶段。 1、明确分析目的与框架 一个分析项目,你的数据对象是谁?商业目的是什么?要解决什么业务问题?数据分析师对这些都要了然于心。基于商业的理解,整理分析框架和分析思路。例如,减少新客户的流失、优化活动效果、提高客户响应率等等。不同的项目对数据的要求,使用的分析手段也是不一样的。 2、数据收集 数据收集是按照确定的数据分析和框架内容,有目的的收集、整合相关数据的一个过程,它是数据分析的一个基础。 3、数据处理 数据处理是指对收集到的数据进行加工、整理,以便开展数据分析,它是数据分析前必不可少的阶段。这个过程是数据分析整个过程中最占据时间的,也在一定程度上取决于数据仓库的搭建和数据质量的保证。 数据处理主要包括数据清洗、数据转化等处理方法。 4、数据分析 数据分析是指通过分析手段、方法和技巧对准备好的数据进行探索、分析,从中发现因果关系、内部联系和业务规律,为商业目提供决策参考。 到了这个阶段,要能驾驭数据、开展数据分析,就要涉及到工具和方法的使用。其一要熟悉常规数据分析方法,最基本的要了解例如方差、回归、因子、聚类、分类、时间序列等多元和数据分析方法的原理、使用范围、优缺点和结果的解释;其二是熟悉1+1种数据分析工具,Excel是最常见,一般的数据分析我们可以通过Excel完成,后而要熟悉一个专业的分析软件,如数据分析工具SPSS/SAS/R/Matlab等,便于进行一些专业的统计分析、数据建模等。
地理信息系统名词解释大全(整理版本)
地理信息系统名词解释大全 地理信息系统Geographic Information System GIS作为信息技术的一种,是在计算机硬、软件的支持下,以地理空间数据库(Geospatial Database)为基础,以具有空间内涵的地理数据为处理对象,运用系统工程和信息科学的理论,采集、存储、显示、处理、分析、输出地理信息的计算机系统,为规划、管理和决策提供信息来源和技术支持。简单地说,GIS就是研究如何利用计算机技术来管理和应用地球表面的空间信息,它是由计算机硬件、软件、地理数据和人员组成的有机体,采用地理模型分析方法,适时提供多种空间的和动态的地理信息,为地理研究和地理决策服务的计算机技术系统。地理信息系统属于空间型信息系统。 地理信息是指表征地理圈或地理环境固有要素或物质的数量、质量、分布特征、联系和规律等的数字、文字、图像和图形等的总称;它属于空间信息,具有空间定位特征、多维结构特征和动态变化特征。 地理信息科学与地理信息系统相比,它更加侧重于将地理信息视作为一门科学,而不仅仅是一个技术实现,主要研究在应用计算机技术对地理信息进行处理、存储、提取以及管理和分析过程中提出的一系列基本问题。地理信息科学在对于地理信息技术研究的同时,还指出了支撑地理信息技术发展的基础理论研究的重要性。 地理数据是以地球表面空间位置为参照,描述自然、社会和人文景观的数据,主要包括数字、文字、图形、图像和表格等。 地理信息流即地理信息从现实世界到概念世界,再到数字世界(GIS),最后到应用领域。 数据是通过数字化或记录下来可以被鉴别的符号,是客观对象的表示,是信息的表达,只有当数据对实体行为产生影响时才成为信息。 信息系统是具有数据采集、管理、分析和表达数据能力的系统,它能够为单一的或有组织的决策过程提供有用的信息。包括计算机硬件、软件、数据和用户四大要素。 四叉树数据结构是将空间区域按照四个象限进行递归分割(2n×2n,且n ≥1),直到子象限的数值单调为止。凡数值(特征码或类型值)呈单调的单元,不论单元大小,均作为最后的存储单元。这样,对同一种空间要素,其区域网格的大小,随该要素分布特征而不同。 不规则三角网模型简称TIN,它根据区域有限个点集将区域划分为相连的三角面网络,区域中任意点落在三角面的顶点、边上或三角形内。如果点不在顶点上,该点的高程值通常通过线性插值的方法得到(在边上用边的两个顶点的高程,在三角形内则用三个顶点的高程)。 拓扑关系拓扑关系是指网结构元素结点、弧段、面域之间的空间关系,主要表现为拓扑邻接、拓扑关联、拓扑包含。根据拓扑关系,不需要利用坐标或距离,可以确定一种地理实体相对于另一种地理实体的位置关系,拓扑数据也有利于空间要素的查询。 拓扑结构为在点、线和多边形之间建立关联,以及彻底解决邻域和岛状信息处理问题而必须建立的数据结构。这种结构应包括以下内容:唯一标识,多边形标识,外包多边形指针,邻接多边形指针,边界链接,范围(最大和最小x、y坐标值)。 游程编码是逐行将相邻同值的网格合并,并记录合并后网格的值及合并网
基于无人船的雷达数据处理系统的制作方法
本技术公开了一种基于无人船的雷达数据处理系统,包括数据采集模块以及数据处理模块;所述数据采集模块包括雷达传感器、遥感影像接收器、摄像模块、船体数据采集模块,所述数据采集模块将所采集的信息预处理后传输至数据处理模块;所述雷达传感器,所述雷达传感器发射电磁波对覆盖水域上的目标进行照射并接收其回波,获得目标跟踪数据并将接收到的电磁波处理为模拟信号。优点在于:本技术的数据处理模块通过模拟建模分析,计算出三维雷达数据,再通过激光雷达得到激光点云分类图、数字高程模型DEM、等高线、数字表面模型DSM、数字正射影像图DOM,最终计算出障碍物点得到障碍信息与前文所得障碍信息比对,保证最终得出的障碍信息准确无误。 权利要求书 1.一种基于无人船的雷达数据处理系统,其特征在于,包括数据采集模块以及数据处理模块; 所述数据采集模块包括雷达传感器、遥感影像接收器、摄像模块、船体数据采集模块,所述数据采集模块将所采集的信息预处理后传输至数据处理模块; 所述雷达传感器,所述雷达传感器发射电磁波对覆盖水域上的目标进行照射并接收其回波,获得目标跟踪数据并将接收到的电磁波处理为模拟信号; 所述遥感影像接收器,用于实时接收卫星下传的遥感影像,并转化为数字信号; 所述摄像模块,至少包括10个全景摄像机,其中至少50%的全景摄像机位于船体的前进方向,用于获取船体周边的视频数据,并转化为数字信号; 所述船体数据采集模块,用于获取船体的位置数据数据、船体的行驶速度数据和船体的加速度数据,并将其电信号转化为数字信号;
所述数据处理模块处理数据采集模块所传输的数据处理后得到障碍信息。 2.根据权利要求1所述的基于无人船的雷达数据处理系统,其特征在于,所述数据处理模块包括模拟建模分析: S1、通过NVIDIA Tegra K1移动处理器进行将雷达传感器所传输的模拟信号进行三维雷达数据转换; S2、通过激光雷达数据处理,得到激光点云数据分类图、数字高程模型DEM、等高线、数字表面模型DSM、数字正射影像图DOM,并将三维数据点投影到栅格地图上; 将所有栅格相对高度大于某个阈值的栅格设定为障碍物点,即得到障碍信息。 3.根据权利要求2所述的基于无人船的雷达数据处理系统,其特征在于,使用分布式计算系统存储雷达数据,通过建立MapReduce模型以云计算的方式对雷达数据进行高速处理,将处理结果与障碍信息进行比对,将一致信息输出,将不一致的信息重新导入步骤S1计算。 4.根据权利要求2所述的基于无人船的雷达数据处理系统,其特征在于,所述数据采集模块在将数据传输至数据处理模块时,按照同一时间戳为时间基准,对每路数据按各自的固有帧周期进行顺序编号,并在存储数据的同时将各路数据帧编号的对应关系存储下来。 5.根据权利要求2所述的基于无人船的雷达数据处理系统,其特征在于,遥感影像的处理步骤如下: 1)遥感影像接收器在接收遥感影像后,确定遥感影像的分辨率并截取,对截取遥感影像进行数据标注; 2)使用Canny边缘检测算法对截取的遥感影像进行预处理,通过对图像边缘进行提取,并将提取得到的图像与原图像叠加,突出航道特征,用以加速分析; 3)搭建图像分类模型,通过在对基础的网络进行分类任务的训练中,在网络的参数存留下低