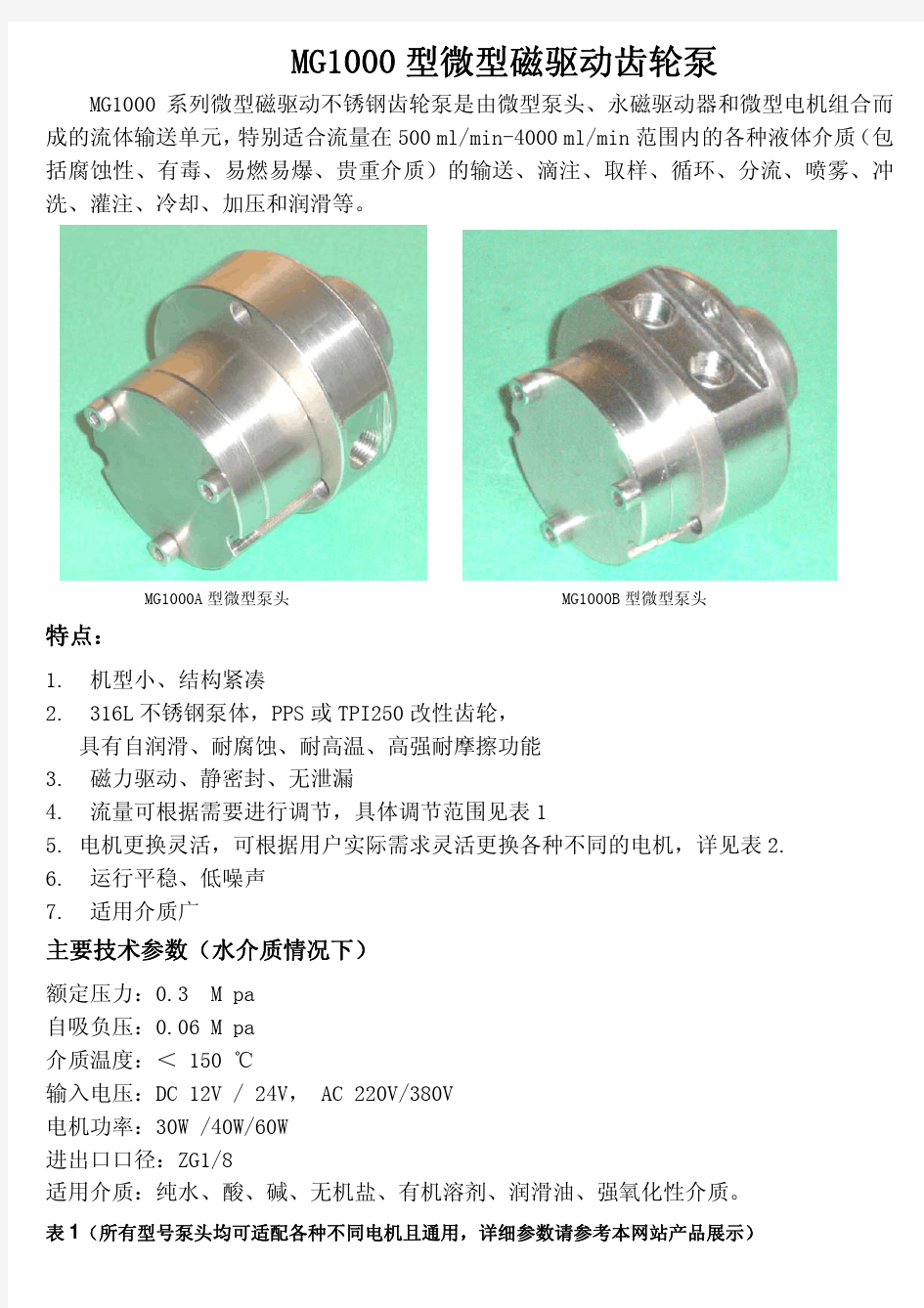
MG1000 型微型磁驱动齿轮泵

NP系列微型磁力齿轮泵中文样本
NP- Fluid Technology solution -微型磁力齿轮泵 Specialist 索 富 您忠实的伙伴
您忠实的伙伴 上海索富实业有限公司成立于2010,是一家以市场需求为先导、技术创新为核心、坚持为客户提供优质产品和服务的微型磁力齿轮泵公司。我们的目标是成为世界领先的微型泵设计和生产者。公司目前在上海拥有研发和销售中心,在福建三明市拥有生产基地。公司人员来自外企管理和技术团队以及国内技师团队,具有微型特种泵15年以上的技术和市场经验以及40年的产品生产和管理经验。公司拥有特种材料应用、专业型线设计、高精度加工、一次注塑成型、精密装配到检测的全套自主技术,已经获得12项专利,包含4项发明专利。公司适应市场需求,每年都有新产品推向市场,都有新技术得到开发和应用。项目进入中国创新创业大赛全国总决赛并获得省级二等奖。全系列产品获得欧盟CE认证。多年来我们的产品行销国内外,在医疗设备、化工装置、工程机械、商用机械、实验室分析、柴油机尾气后处理(SCR)、润滑系统、植保无人机、工业雾化系统、冷却系统、燃料电池、锂电池生产等领域得到广泛应用。产品的稳定、长寿命、高压性能达到甚至超过欧美同类进口产品,获得国内外客户的好评。 我们一直致力于以高度的专业性和贴近客户的服务为您提供最适合需求的完整解决方案。您的需求就是我们的使命。企业简介Company pro le 上海索富实业有限公司成立于2010,是一家以市场需求为先导、技术创新为核心、坚持为客户 提供优质产品和服务的微型磁力齿轮泵公司。我们的目标是成为世界领先的微型泵设计和生产者。公司目前在上海拥有研发和销售中心,在福建三明市拥有生产基地。公司人员来自外企管理和技术团队以及国内技师团队,具有微型特种泵15年以上的技术和市场经验以及40年的产品生产和管理经验。 公司拥有特种材料应用、专业型线设计、高精度加工、一次注塑成型、精密装配到检测的全套自主技术,已经获得12项专利,包含4项发明专利。公司适应市场需求,每年都有新产品推向市场,都有新技术得到开发和应用。 项目进入中国创新创业大赛全国总决赛并获得省级二等奖。全系列产品获得欧盟CE认证。多年来我们的产品行销国内外,在医疗设备、化工装置、工程机械、商用机械、实验室分析、 柴油机尾气后处理(SCR)、润滑系统、植保无人机、工业雾化系统、冷却系统、燃料电池、锂电池生产等领域得到广泛应用。产品的稳定、长寿命、高压性能达到甚至超过欧美同类进口产品,获得国内外客户的好评。 我们一直致力于以高度的专业性和贴近客户的服务为您提供最适合需求的完整解决方案。您的需求就是我们的使命。 企业简介 Company pro le
CQ型磁力驱动泵性能参数及价格
【CQ 型磁力驱动泵】性能参数: 型 号 口径 流量 (m 3 /h) 扬程 (m) 电机功率 (kW) 电 压 (V) 材质 进口(mm) 出口(mm) 14CQ-5 14 10 1.2 5 0.12 220/380 不 锈 钢 16CQ-8 16 12 1.8 8 0.18 220/380 20CQ-12 20 12 3 12 0.37 220/380 25CQ-15 25 20 5.4 15 1.1 380 32CQ-15 32 25 6.5 15 1.1 380 32CQ-25 32 25 4.8 25 1.1 380 40CQ-20 40 32 10 20 2.2 380 40CQ-32 40 32 11.5 32 4 380 50CQ-25 50 40 14.4 25 4 380 50CQ-32 50 40 13.2 32 4 380 50CQ-50 50 32 7.8 50 5.5 380 65CQ-25 65 50 16.8 25 5.5 380 65CQ-32 65 50 25 32 7.5 380 80CQ-32 80 65 50 32 11 380 80CQ-50 80 65 50 50 15 380 100CQ-32 100 80 60 32 15 380 100CQ-50 100 80 60 50 18.5 380 注:表中16CQ-8---100CQ-50都可配防爆电机 CQ 型系列磁力泵价格 编号 型号 进口 出口 流量 扬程 电机功率 电压 单价{元) (MM) (MM) (M3/H) (m) (kw) (v) 普通型 防爆型 1 16CQ-8 16 12 1.8 8 0.18 220 1043 2 20CQ-12 20 12 3 12 0.37 220 1195 3 16CQ-8 16 12 1.8 8 0.18 380 1001 4 20CQ-12 20 12 3 12 0.37 380 1084 1460 5 25CQ-15 25 20 5.4 15 1.1 380 1668 2224 6 32CQ-15 32 25 6.6 15 1.1 380 1779 2294 7 32CQ-25 4.8 25 1.1 380 2016 2502 8 32CQ-25N 4.8 25 2.2 380 2502 3336 9 40CQ-20 40 32 10.8 20 2.2 380 2502 3336 10 40CQ-32 12 32 2 380 3336 4031
磁力齿轮泵品牌公司排名总榜
1.上海阳光泵业制造有限公司 上海阳光泵业是集设计/生产/销售泵、给水设备及泵用控制设备于一体的大型综合性泵业集团,是中国泵行业的龙头企业。总资产达38亿元,在上海、浙江、河北、辽宁、安徽等省市拥有7家企业,5个工业园区,占地面积67万平方米,建筑面积35万平方米。上海阳光获得了“上海市质量金奖”、“上海市科技百强企业”、“上海市名牌产品”、“中国质量信用AAA级”、“全国合同信用等级AAA 级”、“质量、信誉、服务三优企业”、“中国最具竞争力的商品商标”、“五星级服务认证”等荣誉,连续多年入选全国机械500强。高端人才和高素质的员工队伍是阳光发展的动力。集团现有员工4500余人,其中工程技术人员500多名,主要由国内知名水泵专家教授、博士硕士、中高级工程师、高级工艺师组成,形成了具有创新思维的梯队型人才结构。科技创新,是阳光基业长青的生命之源。集团是上海市高新技术企业、上海市知识产权示范企业和上海市专利示范企业。上海市级的“企业技术中心”,每年以销售总额的5%,用于技术创新和新产品研发。 2.天昊泵业集团有限公司 天昊泵业集团是经工商总局批准成立的集团公司,位于京津冀一体化的青县经济开发区南区,是专业生产水泵和控制柜的大型厂家。从设计、研发、铸造、精加工、装配、试验全部自己生产完成。 主要产品:全贯流潜水电泵(单向、双向排水)、QZ/QZB潜水轴流泵(下吸、中吸、井筒式、卧式等)、QJ深井泵、矿用潜水泵(含浮箱、箱式)、不锈钢泵、ZLB立式轴流泵、污水泵等上百种规格型号。 研发中心具有几十年水泵设计丰富经验的专业研究人员,又有年轻的本科毕业生的新生力量和操作能力较强的技术工人。集团研发设备先进、研究方法科学,具有较强的产品研发、试制、测试能力,测试中心的测试水池总容积达200000m3,测试能力:口径Φ32-Φ3000mm,流量0-200000m3,压力 0-10MPa,功率0-600kw/380V,200-3000kw/6KV-10KV。测试系统精度达到GB/T32-2005《回转动力泵水力性能验收实验1级和2级》。集团生产的产品广泛用于农田灌溉、抗旱排涝、市政工程、电厂、工矿、冶金等行业。 3.上海康大泵业制造有限公司 上海康大泵业制造有限公司创建于七十年代末期,是国内著名的专业化研发、生产各种水泵、给排水成套设备的企业。公司集设计、生产、销售、服务于一体,多年来,上海康大本着“用户满意是
体内微型机器人的全方位旋进驱动特性
文章编号:100220446(2006)0620560205 体内微型机器人的全方位旋进驱动特性3 张永顺,张凯,张林燕 (大连理工大学精密与特种加工教育部重点实验室,辽宁大连 116024) 摘 要:提出了一种由外旋转磁场驱动的体内微机器人.它以相邻径向异向磁化瓦状多磁极圆筒形NdFe B永磁体为外驱动器,以机器人内嵌同结构的NdFe B永磁体为内驱动器,外驱动器旋转时产生旋转磁场,通过磁机耦合作用于内嵌驱动器形成机器人驱动力矩,在本体外表面螺纹与流体动压力的作用下,实现机器人在管道内的在线旋进.在建立微机器人游动模型的基础上,以垂直管道为试验环境,研究了机器人的全方位驱动特性,试验结果表明机器人可以实现管道内全方位驱动. 关键词:体内微型机器人;旋转磁场;游动特性;全方位驱动 中图分类号: TP24 文献标识码: B Sp i ra l D r i ve Character isti cs of a M i cro Robot I n si de Human Body Z HANG Yong2shun,Z HANG Kai,ZHANG L in2yan (Key L aboratory for Precision&N on2traditional M achining of M inistry of Education,D alian U niversity of Technology,D alian116024,China) Abstract:A ne w m icr o r obot inside hu man body driven by exteri or r otating magnetic field is p r oposed.It takes a cylindri2 cal NdFe B multi pole per manentmagnet composed of several neighboring tegular magnetsmagnetized anis otr op ically al ong ra2 dial directi on as exteri or actuat or,and a magnet with the same structure e mbedded inside the r obot body as the inner actua2 t or.The r obot scre ws for ward inside p i pe under the acti on bet w een s p iral rib on the exteri or surface of r obot body and fluid dyna m ic p ressure when r obot r otates by magnetic t orque,which is generated by magnet o2mechanical coup ling fr om r otating exteri or actuat or t o inner one.Based on a ne wly devel oped s wi m m ing mathe matical model,its characteristics of omni2direc2 ti onal drive is studied in the envir on ment of erect p i pe.Experi m ental results show that the r obot can realize omni2directi onal drive. Keywords:m icr o r obot inside hu man body;r otating magnetic field;s wi m m ing characteristics;omni2directi onal drive 1 引言(I n troducti on) ME MS技术的发展,使微机器人进入体内执行无创或微创介入医疗作业成为可能.为了安全、可靠地进行肠道内的检查及手术作业,减少病人的痛苦,人们已经研究出微型肠道胶囊内窥镜和胶囊电子药丸.胶囊内窥镜可以无线传输检查图像,电子药丸可以通过在肠道内脉冲放电来医治胃肠疾病.它们均随肠道蠕动来完成整个区域检查与作业,并随排泄物排出体外,其过程安全、可靠,但速度缓慢,效率低下,尤其是错过病变组织时,不能主动返程进行集中局部观察与治疗,使肠道内的一些医疗作业无法完成. 为了实现胶囊式机器人的体内作业,有必要对其实施安全有效的主动驱动控制和姿态调整,尤其要求机器人具有全方位驱动功能,这样才能实现机器人的可靠作业. 日本Ishiya ma等人利用三轴亥姆霍兹线圈提供空间旋转磁场,通过加载电流控制磁场强度及方向,作用于胶囊内嵌磁体带动其旋转,在胶囊表面螺纹与液体的作用下实现旋进[1,2],通过调整外旋转磁场平面的方向对微机器人进行姿态控制[3,4].但通电线圈所产生的驱动力矩小,驱动不安全,尤其当驱动频率较高时,线圈的能量损耗较大,大大降低了机器人的效率. 第28卷第6期 2006年11月机器人 ROBO T Vol.28,No.6 Nov.,2006 3基金项目:国家自然科学基金资助项目(60275034);辽宁省自然科学基金资助项目(20021061,20032119). 收稿日期:2006-01-13
磁力驱动离心泵型号及使用方法
磁力驱动离心泵型号及使用方法 一、磁力驱动离心泵产品概述: 磁力驱动离心泵(简称磁力泵),通常由电动机,磁力偶合器和耐腐蚀离心泵组成。其主要特点是利用磁力偶合器传递动力,完全无泄漏,当电动机带动磁力偶合器的外磁钢旋转时,磁力线穿过问隙和隔离套,作用于内磁钢上,使泵转子与电动机同步旋转,无机械接触地传递扭矩。在泵轴的动力输入端,由于液体被封闭在静止的隔离套内,没有动密封因而完全无泄漏。 磁力驱动离心泵是磁力泵全国联合设计组开发的新型完全无泄漏耐腐蚀泵,其技术经济指标与国外同类产品八十年代末的水平相当。 磁力驱动离心泵型式及基本参数符合JB/T 7742—1995《小型磁力驱动离心泵型式与基本参数》标准和《小型磁力驱动离心泵三个标准的补充规定》。 二、磁力驱动离心泵耐腐蚀性能供参考
符号说明:?一优良,√一良好,?一可用,但腐蚀明显。X—腐蚀严重,不适用。
三、磁力驱动离心泵型号意义: 四、磁力驱动离心泵安装和使用: 1、磁力驱动泵应水平安装,不宜竖立,塑料泵体不得承受管路重量,对于特殊要求垂直安装的场合,电机务必朝上。 2、当CQB磁力泵抽吸液面高于泵轴心线时,磁力驱动泵起动前打开吸入管道阀门即可,若抽吸液面低于泵轴心线时,管道需配备底阀。
3、磁力驱动泵使用前应进行检查,电机风叶转动要灵活,无卡住无异常声响,各紧固件要紧固。 4、检查电机旋转方向是否与磁力泵转向标记一致。 5、磁力驱动泵电机启动后,缓慢打开排出阀,待泵进入正常工作状态后,再将排出阀调到所需开度。 6、磁力驱动泵停止工作前,应先关闭排出阀门,然后关闭吸入管阀门。 五、磁力驱动离心泵使用注意事项: 1、因磁力泵轴承的冷却和润滑是靠被输送的介质,所以绝对禁止空动转,同时避免在工作中途停电后再启动时所造成时空载运转。 2、被输送介质中,若含有固体颗粒,磁力驱动泵入口要加过滤网:如含有铁磁质微粒,需加磁性过滤器。 3、磁力驱动离心泵在使用中环境温度应小于40℃,电机温升不得超过75℃。 4、磁力驱动离心泵被输送的介质及其温度应在泵材允许范围内(详见附表)。工程塑料泵的使用温度<60℃,金属泵的使用温度<100℃,输送吸入压力不大于0.2mpa,最大工作压力1.6mpa、密度不大于1600kg/m3,粒度不大于30 ×10-6m2/s的不含硬颗粒和纤维的液体。 5、磁力驱动离心泵对于输送液为易沉淀结晶的介质,使用后应及时清洗,排净泵内积液。 6、磁力驱动离心泵运行100小时后,应拆检轴承和端面动环的磨损情况,并更换不宜再用的易损件。
TUTHILL磁力驱动泵MG_Series_Service_Manual(中文)
Service Instruction No. 67(MG)安装和服务说明磁 耦合GLOBALGEAR的? MG系列泵
注意经营或工作上塔海尔磁力驱动泵前阅读手册。 目录 第4页:概述/磁力驱动模型, 第5页:工作原理 第5-6页:正确安装/压力限制 第6页:磁铁的温度限制 第7页:驱动器/燃油泵位置/滤网保护方法 第8页:启动 第8-9页:泵的拆卸步骤 第10页:泵查看 第11-12页:泵的装配过程 第13-14页:故障排除 第14页:物料返回
注意 磁耦合泵的磁铁建立非常强大的磁场。特别小心,必须采取下列要求: 心脏起搏器 - 磁铁可以扰乱心脏起搏器的时机。这些磁铁应远离所有起搏器。由于涉及的健康风险,这一点的重要性不能被夸大。 信用卡 - 磁铁可以扰乱信用卡的磁带上的信息。 计算机,计算机磁带,计算机磁盘 - 磁石可以争夺的存储设备上的信息。 手表 - 磁铁会影响传统的机械弹簧驱动手表的运作,以及芯片和电控设计。 电子仪器 - 敏感的电子仪器和设备可能会改变校准或由一个强大的磁场会损坏。 爆炸性气体环境 - 稀土磁体和磁性材料可能产生的火花通过接触在处理。切勿处理稀土磁铁在爆炸性气体环境,因为火花会点燃气氛。 注意 MG磁耦合泵(无泄漏 - 液压研究所定义的)不包含任何动态密封。因此,泄漏的可能性大大降低。 然而,所有的材料都受到磨损和压力,可能最终导致失败,而造成渗漏。如果没有适当的保护措施, 危险液体泄漏有潜在的危险,并可能导致严重伤害或死亡,或创建一个环境危害。 用户必须理解和处理这种潜在的危险,无论是用来制造商的泵。如果被泵送的流体是危险的,必须采 用适当的监控,提供早期预警的任何泄漏。如果您不确定可用的方法来监视你的应用程序,你应该联 系能力的工程公司设计指导。 磁耦合泵可能脱钩,必须停下来重新搞。脱钩单位的操作可能会破坏磁铁和处理时具有低闪点液体, 因为非常快速的热量积聚,会导致严重的爆炸危险。 磁耦合泵设计运行干燥。
微型机器人
职业教育机电一体化专业教学资源库新技术新工艺 名称:微型机器人 编制人: 邮箱: 电话: 编制时间:2014.11 编制单位:辽宁省交通高等专科学校
微型机器人 机器人技术是一门快速发展的高新技术,在许多领域得到了日益广泛的应用,并对人类社会产生着日益重大的影响。微型机器人(Micro-Robotics)是指集成了微型作业工具、各种微小型传感器,具有通用编程能力的小型移动机构。 微机电系统(Micro Electromechanical System,MEMS)是指可批量制作的,将微型机构、微型传感器、微型执行器、信号处理和控制电路、以及接口通信和电源等集于一体的微型器件或系统。20世纪80年代后期,随着大规模和超大规模集成电路的迅速发展,微电子技术与机械、光学等学科的交叉融合促进了MEMS技术的迅速发展。MEMS 是目前正在飞跃发展的微米/纳米技术中的一项十分重要的技术,它的成熟和产业化,对经济建设、国防建设乃至社会发展都将产生深远影响。 微型机器人是利用IC(集成电路)微细加工技术,将驱动器和传动装置、传感器、控制器、电源等集成在一起的功能完备的MEMS系统。MEMS技术可将机器人系统的尺寸缩小到几毫米甚至几百微米,这种微型化的趋势经逐渐成为机器人发展领域的一个重要方向。微型机器人的研究方向可以归纳为三个方面:微操作机器人技术,微定位机器人技术和微型机器人技术。 微型机器人结构尺寸微小,器件精密,可进行微细操作,具有小惯性、快速响应、高谐振频率、高附加值等特点。然而,微型机器人并不是简单意义上普通机器人的微小化,微型机器人一般集成有传感、控制、执行和能量单元,是机械、电子、材料、控制、计算机和生物医学等多学科技术的交叉融合。微型机器人的研究,是一个新颖又具有重大实际意义和挑战性的课题。该技术有利于实现真正意义上的微小系统,充分展示了微小系统的巨大魅力;而且建立微型机器人需要更为微小的驱动器、执行器、传感器、处理器等,由此展开的对微型机器人本体加工和微部件的研制,将有利于实现更高意义上的微系统集成,推动MEMS技术继续前进。 ◎微型机器人的组成、关键技术及分类 微型机器人系统一般由四部分组成:微执行器,微传感器,微能源,控制系统。相应的微执行器技术、检测技术、能源供给和控制技术就是微型机器人的关键技术。 ◆微执行器技术
磁力泵样本
企业简介 本公司生产的磁力驱动泵是由上海化工研究院研究的一种新型无泄漏泵。一九八二年完成了化工部第一台国产CSB型氟塑料磁力泵的任务,并通过化工部技术鉴定,八三年获化工部科技三等奖。一九八四年至今同上海化工研究院保持长期技术合作,我公司被化工部列为定点企业,黄金管理局指定产品。产品载入化工设计手册、医药设计手册、机电设计手册、电力设计手册、暖通设备手册、中国汉英产品大字典。2000年通过ISO9002质量体系认证。 主要产品:一、IMC型(符合HG/T2730-95标准)磁力传动金属、塑料化工流程泵(江苏省高新技术产品),流量:3-200m3/h,扬程:10-125m。二、CGB型金属磁力泵,流量:2.8-20m3/h,扬程:10—20m,使用温度:250度,特殊设计450度。三、CSH磁力齿轮泵,流量:0.037-3m3/h,压力:0.2—0.6MPa。四、CKW型金属、塑料磁力旋涡泵,流量:0.2-6.4m3/h,扬程:15-130m。 五、CSB型塑料磁力泵,流量:1-30m3/h,扬程:3-25m。六、特种规格的磁力泵及釜用磁力传动联轴器。七、PTFE、HDPE旋转成型钢塑复合管及管配件。 我们采用碳化硅、碳化钨滑动轴承和稀土永磁,使磁力泵经久耐用。 泵的过流部件材质根据需要可分别采用304、304L、316、316L、钛等金属材料和玻璃纤维及碳纤维增强F2、F3、F46、PPS、PES、PEEK等塑料。 Company brief introduction The magnetic-driving pump is new type non-leakage pump which is researched by shanghai Chemical Institute and is manufactured in our company. The first product of CSB fluoride plastic magnetic driving pump has been finished in 1982. It has been technically appraised and awarded third price in science and technology by the Ministry of Chemical Industry in1983. Our company has kept technical cooperation with Shanghai Chemical Industry since 1984. Our products are produced under the supervision of quality control center under the Ministry of Chemical Industry and are designated products used by China National Gold Administration. It was as an entry recorded in the Designing Books of Chemical Engineering、Pharmaceutical Industry Machinery & Electric Engineering、Heating Equipment and Chinese English Dictionary of China’s products respectively and so on. Our company has passed the quality system authentication of ISO 9002 in 2000. The following is our main products: 1.IMC magnetic driving pumps(conforming to HG/T2730-95 standard) of both metal and plastics in suspension and vertical types with flow capacity of 3-200m3/h and high lift 10-125m. 2.CGB metal magnetic pumps with flow capacity of 2.8-20m3/h and high lift 10-20m which can be used under the temperature of 250℃ and 450℃if it is specially designed. 3.CSH metal magnetic gear pumps with flow capacity of 0.037-3m3/h and it’s pressure 0.2-0.6MPa. 4.CKW metal or plastic magnetic eddy pumps with flow capacity of 0.2-6.4m3/h and high lift 15-130m. 5.CSB plastic magnetic pumps with flow capacity of 1-30m3/h and high lift 3-25m. 6.Sepecially designed magnetic pumps and magnetic driving coupling for cauldron use. 7.PTFE、HDPE rotomolding pipes. We use sliding bearings made of silicon carbide、tungsten carbide and rare earth magnetic material to make the pump durable. In accordance with various desires, 304,304L、316, 316L, , Ti-alloy, F2, F3, F46,PPS,PES, PEEK and so on. Can be selected as material of overflow component. They have good resistance.
微型机器人驱动技术
微型机器人驱动技术 目前,微型机器人常用的驱动技术概括起来主要有:气动、热驱动、微电机驱动、智能材料驱动和能量场驱动。其中,智能材料驱动常用的有形状记忆合金( SMA)、人工肌肉材料( IPMC)、压电材料( PZT)、巨磁致伸缩材料( GMA);能量场驱动常用的有微波、光波、磁场和超声波等。 一、气动形式 韩国研制出了单气动线路驱动的蚯蚓型管道检测微机器人。该机器人由前气室、后气室和伸展模块 3 部分组成,3 个气室被一个充气管道连接起来。首先,后气室逐渐充入空气并膨胀,机器人身体后部的夹钳紧贴到被检测管道表面; 然后空气使伸展模块内的气室充气、膨胀,机器人就向前伸展身体; 随着空气的不断充入,前气室也逐渐膨胀并达到特定气压值,身体前部的夹钳紧贴到管道表面; 然后通过排气使后气室在气流反作用力下前进,同时伸展模块收缩。通过气阀使充气和排气循环交替进行,就实现了像蚯蚓一样的运动。
图1、蚯蚓型管道检测微机器人 第二、热驱动形式 美国研制出一种热驱动机器人,它的运动主要由热敏晶片的热胀冷缩来完成,热敏晶片由热膨胀系数不同的两层聚合物中夹一个钛钨合金电阻构成,当加热电流通过回路时,热敏晶片向热膨胀系数小的聚合物一侧弯曲,就实现了单自由度运动。 图2、热驱动机器人 第三、微电机驱动形式 南京航空航天大学研制出了微电机驱动的精子形微机器人。该微机器人由椭圆形的头部和 4 个柔软的鞭毛组成,鞭毛由机器人头部内置的 4 个微电机驱动,当柔软的鞭毛被微电机带动在液体环境中旋转时,它们将形成又长又细的螺旋,液体作用于鞭毛的粘滞力将对微机器人产生推力从而使其前进。
图3、精子形微机器人 第四、智能材料驱动形式 韩国研制了一种形状记忆合金( SMA) 驱动的仿蚯蚓型微机器人。形状记忆合金和波纹管组合使微机器人伸缩前行,具体移动过程是: 硅树脂波纹管作为弹簧提供变形力,当 SMA 弹簧被加热收缩时,微机器人前部的微针钳住接触面,躯干后部向前滑动,同时 SMA 外部的硅树脂波纹管收缩储存变形能;然后,SMA 弹簧冷却,波纹管储存的变形能使 SMA 弹簧伸长,同时,后部的微针钳住接触面,躯干前部向前滑动;最后,波纹管和 SMA 弹簧回到初始平衡状态,二者弹力相等。SMA 的伸缩靠控制系统对形状记忆合金加热-冷却循环交替实现。 图4、仿蚯蚓型微机器人
电动汽车轮边驱动系统设计开题报告
安徽工程大学机电学院 本科毕业设计(论文)开题报告题目:电动汽车轮边驱动系统设计 课题类型:设计 学生姓名:秦雨生 学号: 3102114335 专业班级:车辆2103 教学单位:机械与汽车工程学院 指导教师:时培成 开题时间: 2014.2 24 2014年 2月 24日
一选题的依据和意义 目前新兴汽车发展的前景看轮毂式电动汽车是新兴的一种电动汽车驱动形式。轮毂式电驱动系统有直接驱动式电动轮和带轮边减速器电动轮两种基本形式。它直接将电机安装在车轮轮毂中,省略了传统的离合器、变速箱、主减速器及差速器等部件,大大简化了整车结构,提高了传动效率,并且能通过控制技术实现对电动轮的电子差速控制。并且在节能环保方面比现在燃烧燃料的普通汽车具有很大的优势。 我们国家在传统的汽车领域内目前还无法和国外的几乎任何产品比拼,因为我们国家的在传统的工业领域比国外起步晚得多,且在发展过程中曾经遭遇了困难。目前新兴汽车产业在快速的发展,我们可以看到在新兴的汽车产业中,我国和外国发展的差距并不差的太远,就目前的对新型汽车的研究与发展可以说是几乎不落下风。因此我们有信心在未来汽车发展的路途上尤其是在新兴汽车产业的发展上我国有能力赶上发达国家甚至处于领先地位,因为新兴能源汽车对全人类来说还并不是全能掌握目前都几乎还处在研发的地步。因此我们对新兴能源汽车的关注度要提高。这也可以使我国追赶外国在汽车产业方面的一个途径。
二国内外研究的现状和发展趋势 国外著名汽车公司都十分重视研究开发电动汽车, 世界发达国家不惜投入巨资进行研究开发, 并制定了一些相关的政策、法规来推动电动汽车的发展。 目前国际上对轮毂式电动汽车的研究主要以日本为主。日本庆应义塾大学环境信息学部清水浩教授领导的电动汽车研究小组在过去的十几年中已试制了5种不同形式的样车。其中,1991年与东京电力公司共同开发的4座电动汽车IZA,采用Ni-Cd电池为动力源,以4个额定功率为6.8kW、峰值功率达到25kW的外转子式永磁同步轮毂电机驱动,最高速度可达176km/h。1996年,该小组联合日本国家环境研究所研制了采用电动轮驱动系统的后轮驱动电动汽车ECO,该车的电动轮驱动系统选用永磁直流无刷电动机,额定功率为6.8kW,峰值功率为20kW,并匹配行星齿轮减速机,该电动轮采用机械制动与电机再生制动相结合的方式。2001年,该小组又推出了以锂电池为动力源,采用8个大功率交流同步轮毂电机独立驱动的电动轿车KAZ。该车安装了8个车轮,大大增加了该车的动力,从而使该车的最高速度可以达到惊人的311km/h。KAZ 的电动轮系统中采用高转速的高性能内转子型电动
磁力驱动泵基本结构及工作原理
磁力泵由泵、磁力耦合器、电动机三部分组成。关键部件磁力耦合器由外磁转子、内转子及不导磁的隔离套组成。当电动机带动外磁转子旋转时,磁场能穿透空气间隙和非磁性物质,带动与叶轮相连的内磁转子作同步旋转,实现动力的无接触传递,将动密封转化为静密封。由于泵轴、内磁转子被泵体、隔离套完全封闭,从而彻底解决了“跑、冒、滴、漏”问题,消除了炼油化工行业易燃、易爆、有毒、有害介质通过泵密封泄漏的安全隐患,有力地保证了职工的身心健康和安全生产。 入口/suction side 叶轮/impeller 出口 /discharge side 滑动轴承/slide bearing 外磁缸体/rotor outer 内磁缸体/inner rotor 隔离套/can 滑动轴承/slide bearing m a g n e t i c d r i v e p u m p s 磁力泵
一、磁力泵工作原理 将n对磁体(n为偶数)按规律排列组装在磁力传动器的内、外磁转子上,使磁体部分相互组成完整藕合的磁力系统。当内、外两磁极处于异极相对,即两个磁极间的位移角Φ=0,此时磁系统的磁能最低;当磁极转动到同极相对,即两个磁极间的位移角Φ=2π/n,此时磁系统的磁能最大。去掉外力后,由于磁系统的磁极相互排斥,磁力将使磁体恢复到磁能最低的状态。于是磁体产生运动,带动磁转子旋转。 二、结构特点 1.永磁体 由稀土永磁材料制成的永磁体工作温度范围广(-45-400℃),矫顽力高,磁场方向具有很好的各向异性,在同极相接近时也不会发生退磁现象,是一种很好的磁场源。钐钴稀土合金(Sm2Co17) 2.隔离套 在采用金属隔离套时,隔离套处于一个正弦交变的磁场中,在垂直于磁力线方向的截面上感应出涡电流并转化成热量。涡流的表达式为:。其中Pe-涡流;K—常数;n—泵的额定转速;T-磁传动力矩;F-隔套内的压力;D-隔套内径;一材料的电阻率;—材料的抗拉强度。当泵设计好后,n、T是工况给定的,要降低涡流只能从F、D、、等方面考虑。选用高电阻率、高强度的非金属材料制作隔离套,在降低涡流方面效果十分明显。
微型机器人
微型机器人的发展与展望 摘要:微型机器人是微电子机械系统的一个重要分支, 由于它能进入人类和宏观机器人所不及的狭小空间内作业, 近几十年来受到了广泛的关注。本文首先给出了近年来国内外出现的几种微型机器人, 在分析了其特点和性能的基础上, 讨论了目前微型机器人研究中所遇到的几个关键问题, 并且指出了这些领域未来一段时间内的主要研究和发展方向。 关键词:微型机器人; 关键技术;应用
前言 机器人技术是一门快速发展的高新技术,在许多领域得到了日益广泛的应用,并对人类社会产生着日益重大的影响。微型机器人(Micro-Robotics)是指集成了微型作业工具、各种微小型传感器,具有通用编程能力的小型移动机构。微型机器人是利用IC(集成电路)微细加工技术,将驱动器和传动装置、传感器、控制器、电源等集成在一起的功能完备的MEMS系统。MEMS技术可将机器人系统的尺寸缩小到几毫米甚至几百微米,这种微型化的趋势经逐渐成为机器人发展领域的一个重要方向。微型机器人的研究方向可以归纳为三个方面:微操作机器人技术,微定位机器人技术和微型机器人技术。 微型机器人结构尺寸微小,器件精密,可进行微细操作,具有小惯性、快速响应、高谐振频率、高附加值等特点。然而,微型机器人并不是简单意义上普通机器人的微小化,微型机器人一般集成有传感、控制、执行和能量单元,是机械、电子、材料、控制、计算机和生物医学等多学科技术的交叉融合。微型机器人的研究,是一个新颖又具有重大实际意义和挑战性的课题。该技术有利于实现真正意义上的微小系统,充分展示了微小系统的巨大魅力;而且建立微型机器人需要更为微小的驱动器、执行器、传感器、处理器等,由此展开的对微型机器人本体加工和微部件的研制,将有利于实现更高意义上的微系统集成,推动MEM S技术继续前进。 1 微型机器人的发展概况 近年来,采用MEMS技术的微型卫星、微型飞行器和能进入狭窄空间的微型机器人展示了诱人的应用前景和军民两用的战略意义。因此, 作为微机电系统技术发展方向之一的基于精密机械加工微机器人技术研究已成为国际上的一个热点, 这方面的研究不仅有强大的市场推动, 而且有众多研究机构的参与。以日本为代表的许多国家在这方面开展了大量研究, 重点是发展进入工业狭窄空间微机器人、进入人体狭窄空间医疗微系统和微型工厂。国内在国家自然科学基金、863 高技术研究发展计划等的资助下, 有清华大学、上海交通大学、哈尔滨工业大学、广东工业大学、上海大学等科研院所针对微型机器人和微操作系统进行了大量研究, 并分别研制了原理样机。 目前国内对微型机器人的研究主要集中在三个领域: (1)面向煤气、化工、发电设备细小管道探测的微型机器人。(2)针对人体、进入肠道的无创诊疗微型机器人。(3)面向复杂机械系统非拆卸检修的微型机器人。 国外:日本、欧美发达国家开展了大量研究,重点发展工业及医疗用管道微机器人和微型工厂。 国内:MEMS技术已列入863计划,促进了微型机器人研究的进步。我国的MEMS技术包括微型机器人技术与国外的差距较大,仍处于不断追赶的过程中。 2 微型机器人的组成 微型机器人系统一般由四部分组成:微执行器,微传感器,微能源,控制系统。相应的微执行器技术、检测技术、能源供给和控制技术就是微型机器人的关键技术。 3 微型机器人的关键技术 3.1 微执行器技术
基于纵向力分配的轮边驱动电动汽车稳定性控制
第38卷第3期2010年3月 同济大学学报(自然科学版) JO URNAL OF TON GJI UNIVERSITY(NATURAL SCIEN CE)Vol.38No .3 Mar.2010 文章编号:0253-374X(2010)03-0417-05DO I :10.3969/j.issn.0253-374x.2010.03.019 收稿日期:2009-03-24 基金项目:国家/八六三0高技术研究发展计划资助项目(2006AA11A101);上海市优秀学科带头人计划资助项目(08XD14043)作者简介:熊 璐(1978)),男,讲师,工学博士,主要研究方向为汽车系统动力学与控制.E -mail:xiong_lu@https://www.360docs.net/doc/f06694223.html, 基于纵向力分配的轮边驱动电动汽车稳定性控制 熊 璐,余卓平,姜 炜,蒋造云 (同济大学汽车学院,上海201804) 摘要:采用层次化整车稳定性控制方法和加权二乘法优化分配算法,通过纵向力在约束范围内的合理分配形成直接横摆力矩,改善车辆的行驶姿态.实车试验结果显示,控制器根据各轮状态实现了四轮纵向力有效分配,车辆横摆角速度能够很好地跟踪参考横摆角速度;通过控制,降低了车辆横摆角速度与侧向加速度,提高了车辆的操纵稳定性. 关键词:四驱电动汽车;稳定性控制;纵向力分配;控制分配;加权最小二乘法中图分类号:U 461.6 文献标识码:A Re search on V ehicle Stability Control of 4WD Electric V ehicle Base d on Longitudinal Force Control Allocation XIONG Lu ,YU Zhuopin g,JIANG Wei ,JIANG Zaoyun (C ollege o f Auto motive Studies,Tongji University,Sha nghai 201804,C hina) Abstract :A vehicle stability control based on hierarc hica l c ontrol approach was introduced.Through the Weighted Lea s-t Squares (WLS)control allocation a lgorithm,the longitudina l force of ea ch tire (m otor torque)was distributed c onsidering the constraints to form the direct ya w m om ent.The experiment results show the respec tive longitudinal force of the four wheels has been effectively distributed ac cording to the status of eac h wheel.And a lso the vehic le .s yaw rate can follow the reference yaw rate exc ellently.The vehic le .s yaw rate a nd latera l a cceleration ha ve been reduced,meanwhile,the vehic le handling a nd stability have been enhanc ed instead.Key word s : 4WD elec tric vehicle; stability control; longitudinal force distribut ion;control a lloc ation;weighted least -squares (WLS) 汽车电动化是汽车驱动系统的发展趋势,混合 动力电动汽车(H EV )、燃料电池电动汽车(FCEV)和纯电动汽车(EV)都是各大汽车公司研发的重点.电动汽车在驱动形式和控制方式上与传统内燃机汽车有很大区别.对于轮毂电机驱动的四轮驱动电动汽车来说,多执行器是其具有的独特优势,各个电机的扭矩可以独立、精确地加以控制,为稳定性控制带来更多自由度 [1-2] . 传统内燃机汽车上,采用制动器为执行元件利用制动力进行车辆稳定性控制技术 [3] .轮毂电机轮 边驱动既可以输出驱动力也可以输出制动力.文献[4-5]对电动汽车横摆控制展开了初步研究,采用简单的分配方法,即一侧增加驱动/制动扭矩$T ,另一侧减小$T ,改善车辆侧向动力学性能,该控制方法没有考虑各轮的不同状态以及车辆的约束条件.借鉴飞行控制中的控制分配方法[6],文献[7]对以PI (比例积分)控制器为参考模型的运动控制器,通过仿真研究了约束条件下的以车辆稳定性为控制目标的分配控制方法.文献[8]对轮边驱动电动汽车的纵向力控制分配进行了仿真研究,显示了分配控制算法实现车辆稳定性控制的有效性.文献[9]通过计算机仿真,对3种考虑约束条件的扭矩分配算法:重新分配广义逆法(RPI)、层叠广义逆法(CGI)和加权最小二乘法(WLS),在计算速度、迭代情况和计算精度等方面进行了对比评价,显示加权最小二乘法在计算速度与迭代精度方面具有优势. 本文采用由包含前馈反馈控制的运动控制器与基于加权最小二乘法的控制分配器相结合,通过纵向力(电机扭矩)在电机约束范围内的合理分配形成直接横摆力矩,实现对车辆稳定性的控制;在所开发的四轮驱动电动汽车上进行双移线和蛇形等典型操纵稳定性实车试验,实车试验结果显示所开发的控 制算法能很好地提高车辆的操纵稳定性.
自吸式磁力驱动泵原理及参数
自吸式磁力驱动泵原理及参数 在很多时候由于不清楚自吸式磁力泵在使用时的注意事项往往导致水泵漏水或者出现其他故障,今天我们这里来介绍一下自吸式磁力驱动泵使用注意事项。 自吸式磁力泵常用的型号为:自吸式磁力驱动泵,材质为不锈钢304材质,也可订做316L不锈钢。ZCQF型氟塑料自吸磁力泵,材质为塑料或者氟塑料。 1.防止颗粒进入 (1)不允许有铁磁杂质、颗粒进入磁力传动器和轴承摩擦副。 (2)输送易结晶或沉淀的介质后要及时冲洗(停泵后向泵腔内灌注清水,运转1min后排放干净),以保障滑动轴承的使用寿命。 (3)输送含有固体颗粒的介质时,应在泵流管入口处过滤。 2.防止退磁 (1)磁力矩不可设计得过小。 (2)应在规定温度条件下运行,严禁介质温度超标。可在磁力泵隔离套外表面装设铂电阻温度传感器检测环隙区域的温升,以便温度超限时报警或停机。 3.防止干摩擦 (1)严禁空转。 (2)严禁介质抽空。 (3)在出口阀关闭的情况下,泵连续运转时间不得超过2min,以防磁力传动器过热而失效。 由于磁力泵泵腔中存在一定的间系及磁力泵内使用的是静轴承,由此该系列泵绝不可以使用在有压力的系统中,正压与负压均不可行。
(一)因磁力泵轴承的冷却和润滑是靠被输送的介质,所以绝对禁止空运转,同时避免在工作中途停电后再启动时所造成时空载运转。 (二)被输送介质中,若含有固体颗粒,泵入口要加过滤网:如含有铁磁质微粒,需加磁性过滤器。 (三)泵在使用中环境温度应小于40℃,电机温升不得超过75℃。 (四)被输送的介质及其温度应在泵材允许范围内。工程塑料泵的使用温度<60℃,金属泵的使用温度<100℃,输送吸入压力不大于0.2MPa,最大工作压力1.6MPa,密度不大于1600Kg/m3,粘度不大于30X10-6m2/S的不含硬颗粒和纤维的液体。 (五)对于输送液为易沉淀结晶的介质,使用后应及时清洗,排净泵内积液。 (六)磁力泵正常运行1000小时后,应拆检轴承和端面动环的磨损情况,并更换不宜再用的易损件。