摆式飞剪设计计算
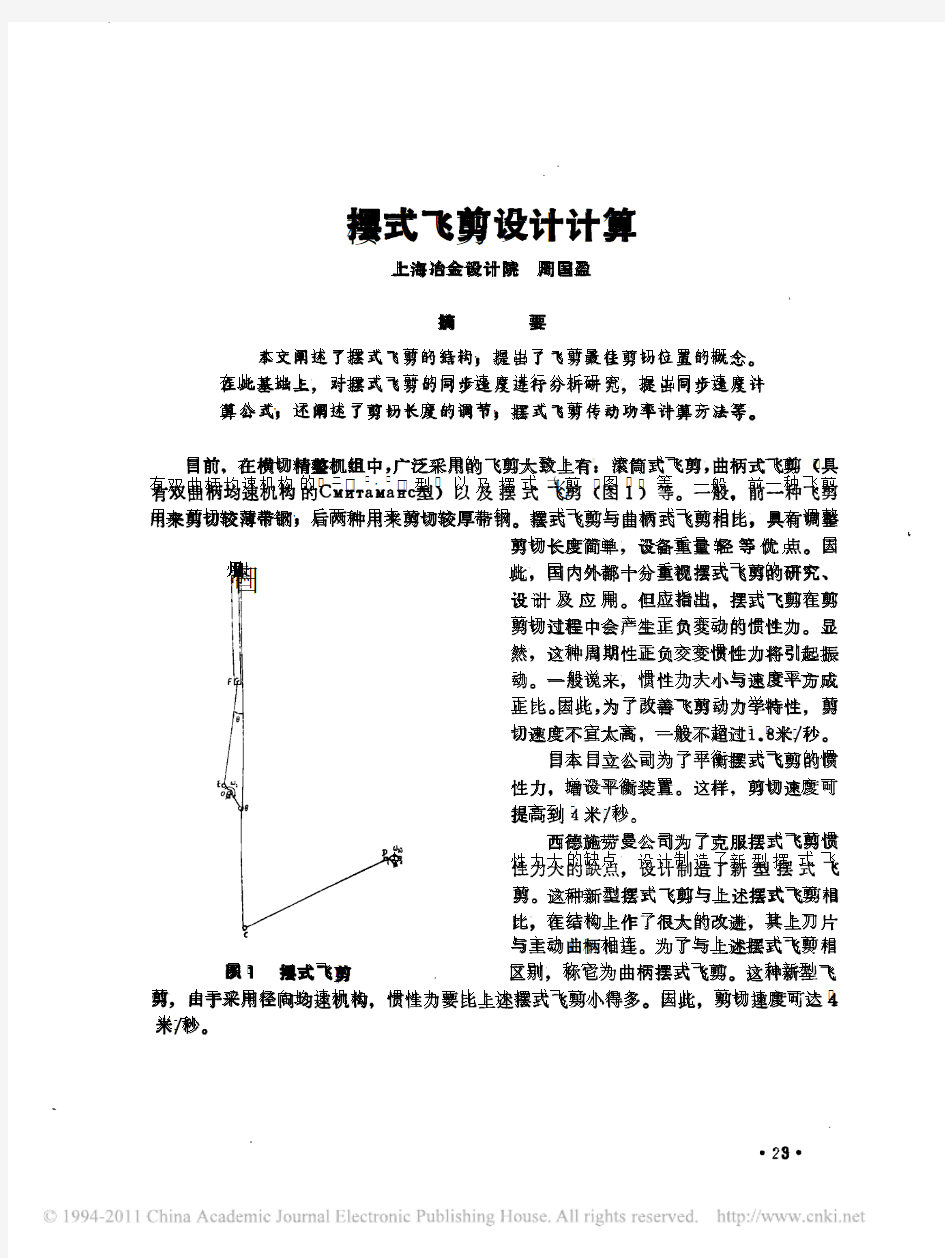

飞剪的机构分析与设计
《机械原理课程设计》 廖汉元孔建益 闻欣荣李佳 编撰 武汉科技大学 机械自动化学院 机械设计与制造教研室 1999年5月(02年再版) 飞剪机构分析与设计任务书 一.工艺要求1.剪切运动速度为V t=2m/s的钢板,拉钢系数=V 刀/ V t =[], []=~2.两种钢板定尺(长度)L=1m; ; 3.剪切时上下剪刃有间隙,剪切后上下剪刃不发生干涉(相碰); 4.剪切时上、下剪刃沿钢板运动速度方向的速度相对误差: ΔV刀[]二.给定参数 1.工艺参数 图 1
剪切力F=10T=98kN; 支座A距辊道面高约为 h250mm(如图1);刀刃重合量Δh5mm; 钢板厚度Δb=1mm;2.机构设计参数 按定尺L=1m给出机构的行程速比系数k 、远极位传动角2、摇杆摆角: 表1 参数与方案 三.设计内容 1.根据工艺要求制定机构方案,定性比较各方案的优、劣; 2.设计出满足工艺要求的机构尺寸及上下剪刃的位置尺寸; 3.根据最终设计结果按比例绘制机构运动简图及上下剪刃的轨迹; 4.进行机构的运动及 力分析,检验上下剪刃的速度相对误差、拉钢系数是否满要求,并求出曲柄上的平衡力矩M b 《飞剪机构分析与设计》 指导书二,对剪机运动的要求:
1.曲柄转一圈对钢材剪切一次; 2.剪切时,上、下剪刃速度相对误差小于其许用值: V 刀=2|V Et -V Ft |/(V Et +V Ft ) = .3.剪切时,上下剪刃应与钢材运动同步。 一般希望剪刃速度略大于钢材运动速度,即拉钢系数>1: V 刀= (V Et +V Ft )/2; = V 刀/ V t = =~. 4.能调节钢材的剪切长度L 三,设定参数 1.工艺参数 剪切力F=10T=98kN 支座A 距辊道面高约为h 250mm 刀刃重合量Δh5mm 钢板厚度Δb=1mm 2.机构设计参数
剪切力的计算方法
第3章 剪切和挤压的实用计算 3.1 剪切的概念 在工程实际中,经常遇到剪切问题。剪切变形的主要受力特点是构件受到与其轴线相垂直的大小相等、方向相反、作用线相距很近的一对外力的作用(图3-1a),构件的变形主要表现为沿着与外力作用线平行的剪切面(n m -面)发生相对错动(图3-1b)。 图3-1 工程中的一些联接件,如键、销钉、螺栓及铆钉等,都是主要承受剪切作用的构件。构件剪切面上的力可用截面法求得。将构件沿剪切面n m -假想地截开,保留一部分考虑其平衡。例如,由左部分的平衡,可知剪切面上必有与外力平行且与横截面相切的力Q F (图3-1c)的作用。Q F 称为剪力,根据平衡方程∑=0Y ,可求得F F Q =。 剪切破坏时,构件将沿剪切面(如图3-la 所示的n m -面)被剪断。只有一个剪切面的情况,称为单剪切。图3-1a 所示情况即为单剪切。 受剪构件除了承受剪切外,往往同时伴随着挤压、弯曲和拉伸等作用。在图3-1中没有完全给出构件所受的外力和剪切面上的全部力,而只是给出了主要的受力和力。实际受力和变形比较复杂,因而对这类构件的工作应力进行理论上的精确分析是困难的。工程中对这类构件的强度计算,一般采用在试验和经验基础上建立起来的比较简便的计算方法,称为剪切的实用计算或工程计算。 3.2 剪切和挤压的强度计算 3.2.1 剪切强度计算 剪切试验试件的受力情况应模拟零件的实际工作情况进行。图3-2a 为一种剪切试验装置的简图,试件的受力情况如图3-2b 所示,这是模拟某种销钉联接的工作情形。当载荷F 增大至破坏载荷b F 时,试件在剪切面m m -及n n -处被剪断。这种具有两个剪切面的情况,称为双剪切。由图3-2c 可求得剪切面上的剪力为 2 F F Q =
飞剪机传动装置设计说明书 -
机械设计课程设计计算说明书 设计题目:飞剪机传动装置设计 院系:机械工程及自动化学院 班级:130715班 指导老师:张建斌 2016年6月6日
目录 目录 ...................................................................................... 错误!未定义书签。 一、飞剪机总体方案设计: ............................................................................. - 4 - 1.1 滚筒式飞剪机 ................................................................................... - 4 - 1.2 曲柄连杆式飞剪机............................................................................. - 5 - 1.3曲柄摇杆式飞剪机............................................................................. - 5 - 二、电动机选型:........................................................................................... - 8 - 2.1类型和结构形式的选择: ................................................................... - 9 - 2.2确定电机的额定功率:....................................................................... - 9 - 2.3确定电机的转速:............................................................................. - 9 -三.传动系统的运动和动力参数....................................................................... - 9 - 3.1计算传动比.................................................................................. - 10 - 3.2传动比分配..................................................................................... - 10 - 3.3确定各轴运动和动力参数 ................................................................. - 10 - 四、齿轮的设计与校核.................................................................................. - 12 - 4.1高速级齿轮的设计与校核 .................................................................. - 12 - 4.2低速级齿轮的设计与校核 .................................................................. - 18 - 4.3开式齿轮的设计与校核...................................................................... - 24 -五.轴的设计与校核 ..................................................................................... - 28 - 5.1高速轴的设计与校核......................................................................... - 28 - 5.2中间轴的设计与校核......................................................................... - 31 - 5.3低速轴的设计与校核......................................................................... - 34 -
飞剪的应用与自动控制原理方法
飞剪的工作原理 吕建东2014年3月18号 飞剪的逻辑控制过程由PLc系统实现,在上位机系统可设定定尺剪的控制参数 (其中包括定尺的长度Ll、定尺数量N、剪切因子等)、启动,停止,测试定尺剪,在生产过程中,由18#机架后面的热金属探测器检测到钢材头部的时间Tn,同时开始计时,根据时问和成品机架的线速度S、热金属探测器到定尺剪交叉位之间的距离LO 可以计算出定尺剪启动剪切的时间点Tn+1。 其中:Tn+1=Tn+(LO+L1‘N)/S PLC系统根据不同的速度、品种规格计算和优化出最佳的剪切曲线㈣,通过DP 总线把速度的给定值传送到定尺剪的直流传动系统,完成每一个剪切周期。 1硬件构成及功能 棒材生产线一般配置三台剪子,本生产线根据实际的需要增加了一台飞剪,因此本系统又四台飞剪,分别为1#、2#、3#、3B#剪,l#、2#飞剪用于生产过 程的切头、切尾、碎断,3#、3B#剪根据上位机系统的设定完成不同规格品种的定 尺剪切,把轧件跟据预先设定的长度按不同的倍数进行剪切,分段送到冷床,确保定尺的精度,以提高定尺率,优化产品的技术经济指标。飞剪动作执行过程包括剪切及定位。飞剪在正常剪切过程下有三个可能运行状态(运行速度):自动速度、碎断速度、测试速度。在生产过程中使用最多的之中状态是自动状态。碎断速度的使用是轧件在生产过程如果出现不正常现象,需要对轧件进行碎断处理时用到。测试速度主要是作为准备生产前对设备时候正常状态的测试。 飞剪系统由两部分组成:一是直流传动装置,二是逻辑控制单元(属于基础自动化级)。飞剪的自动速度匹配信号是基础自动化级给定的。飞剪在剪刀位置安装由位
置检测编码器和定位接近开关,在剪机前有热会属探测器。它的基本原理是:当有轧件来时,热金属检测器HMD检测到轧件信号后,飞剪电机经过启动延时,以超前于前一架轧机线速度一定量的速度启动,达到自动剪切速度值,先加速后匀速,运行至剪切点时,剪刃闭合,对轧件进行剪切。然后,飞剪进入定位过程。开始减速,控制系统将飞剪速度将到一个比较低的值,这个过程叫飞剪制动,到达到接近开关定位地方飞剪准确停止,经过一个剪切循环飞剪刀片位置初始化。等待下一个剪切循环。 飞剪控制系统的硬件构成:摆动剪、直流电机、测速用的脉冲编码器、测剪子刀位角度的脉冲编码器、热金属探测器、定位用的接近开关、数字化的西门子6RA70 系列直流传动控制系统、用于剪子自动化逻辑控制的PLc系统,其中包括西门子的cPu、高速计数}、通讯处理K、用于数据通讯的DP总线等。直流传动的数据给定、反馈、传动的状态、报警监控通过DP总线实现与PLC之间的数据交换和通讯”。
剪切力的计算方法
第3章剪切和挤压的实用计算 3.1剪切的概念 在工程实际中,经常遇到剪切问题。剪切变形的主要受力特点是构件受到与其轴 线相垂直的大小相等、方向相反、作用线相距很近的一对外力的作用(图3-1a),构件 的变形主要表现为沿着与外力作用线平行的剪切面(m - n面)发生相对错动(图3- 1b)。 图3-1 工程中的一些联接件,如键、销钉、螺栓及铆钉等,都是主要承受剪切作用的构 件。构件剪切面上的内力可用截面法求得。将构件沿剪切面m-n假想地截开,保留一 部分考虑其平衡。例如,由左部分的平衡,可知剪切面上必有与外力平行且与横截面相切的内力F Q (图3-1C)的作用。F Q称为剪力,根据平衡方程',=0,可求得F Q二F。剪切破坏时,构件将沿剪切面(如图3-la所示的m-n面)被剪断。只有一个剪切面的情况,称为单剪切。图3-1a所示情况即为单剪切。 受剪构件除了承受剪切外,往往同时伴随着挤压、弯曲和拉伸等作用。在图3-1中没有完全给出构件所受的外力和剪切面上的全部内力,而只是给出了主要的受力和内力。实际受力和变形比较复杂,因而对这类构件的工作应力进行理论上的精确分析是困难的。工程中对这类构件的强度计算,一般采用在试验和经验基础上建立起来的比较简便的计算方法,称为剪切的实用计算或工程计算。
3.2剪切和挤压的强度计算3.2.1剪切强度计算
剪切试验试件的受力情况应模拟零件的实际工作情况进行。图 试验装置的简图,试件的受力情况如图 3-2b 所示,这是模拟某种销钉联接的工作情 形。当载荷F 增大至破坏载荷 F b 时,试件在剪切面 m - m 及n - n 处被剪断。这种具 有两个剪切面的情况,称为双剪切。由图 3-2c 可求得剪切面上的剪力为 F Q 图3-2 由于受剪构件的变形及受力比较复杂,剪切面上的应力分布规律很难用理论方法 确定,因而工程上一般采用实用计算方法来计算受剪构件的应力。 在这种计算方法中, 假设应力在剪切面内是均匀分布的。若以 A 表示销钉横截面面积,则应力为 F Q A ?与剪切面相切故为切应力。以上计算是以假设“切应力在剪切面上均匀分布”为基础 的,实际上它只是剪切面内的一个“平均切应力”,所以也称为名义切应力。 当F 达到F b 时的切应力称剪切极限应力, 记为-b 。对于上述剪切试验, 剪切极限 应力为 _ Fb ■b - 2A 3-2a 为一种剪切 (3-1) bj
平面四杆机构分析报告
工业设计机械设计基础大作业 一、序言 平面连杆机构是若干个刚性构件通过低副(转动副、移动副)联接,且各构件上各点的运动平面均相互平行的机构。虽然与高副机构相比,它难以准确实现预期运动,设计计算复杂,但是因为低副具有压强小、磨损轻、易于加工和几何形状能保证本身封闭等优点,故平面连杆机构广泛用于各种机械和仪器。对连杆机构进入深入透彻的研究,有助于工业设计的学生在今后的产品设计中对其进行灵活应用或创新改进。 二、平面连杆机构优缺点的介绍 连杆机构应用十分广泛,它是由许多刚性构件用低副连接而成的机构,故称为低副机构,这类机构常常应用于各种原动机、工作机和仪器中。例如,抽水机、空气压缩机中的曲柄连杆机构,牛头刨床机构中的导杆机构,机械手的传动机构,折叠伞的收放机构等。这其中铰链四杆机构,曲柄滑块机构和导杆机构是最常见的连杆机构形式。 它们的共同特点是:第一,它们的运动副元素是面接触,所以所受的压力较高副机构小,磨损轻;第二,低副表面为平面和圆柱面,所以制造容易,并且可获得较高的加工精度;第三,低副元素的接触是依靠本身的几何约束来实现的,因此不需要高副机构中的弹簧等保证运动副的封闭装置。 连杆机构也存在如下一些缺点:为了满足设计的要求,往往要增加构件和运动副数目,使机构构造复杂,有可能会产生自锁;制造的不精确所产生的累积误差也会使运动规律发生偏差;设计与计算比高副机构复杂;在连杆机构运动过程中,连杆及滑块的质心都在作变速运动,所产生的惯性力难以用一般方法方法加以消除,因而会增加机构的动载荷,所以连杆机构不宜用于高速运动。此外,虽然可以利用连杆机构来满足一些运动规律和运动轨迹的设计要求,但其设计却是十分困难的,且一般只能近似地得以满足。 正因如此,所以如何根据最优化方法来设计连杆机构,使其能最佳地满足设计要求,一直是连杆机构研究的一个重要课题。 三、平面四杆机构的基本类型与应用实例。 连杆机构是由若干刚性构件用低副连接所组成的。在连杆机构中,若各运动构件均在相互平行的平面内运动,则称为平面连杆机构。平面四杆机构是平面连杆机构的最基本形式,这其中所有运动副均为转动副的四杆机构称为铰链四杆机构。 在铰链四杆机构中,按连架杆能否作整周转动,可将四杆机构分为三种基本形式。即曲柄摇杆机构、双曲柄机构和双摇杆机构。其中: 1.曲柄摇杆机构 在铰链四杆机构中,若两连架杆中有一个为曲柄(整周回转),另一个为摇杆(一定范围内摆动),则称为曲柄摇杆机构。 在这种机构中,当曲柄为原动件时,可将原动件的连续转动,转变为摇杆的反复摆动。如飞剪、间歇传送机构、传送带送料机构等。
课程设计(飞剪机构的设计)
课程设计(飞剪机构的设计)
h 图 h A 飞剪机构的设计 一、 设计内容 1、工艺要求 1.1剪切运动速度为V t =2m/s 的钢板,拉钢系数δ=V 刀/ V t =[δ], [δ]=1.01~1.05 1.2 两种钢板定尺(长度)L=1m; 0.65m ;1.3 剪切时上下剪刃有间隙,剪切后上下剪刃不发生干涉(相碰); 1.4 剪切时上、下剪刃沿钢板运动速度方向的速度相对误差: ΔV 刀≤0.05=[ε] 2、给定参数 2.1工艺参数 剪切力F=10T=98kN; 支座A 距辊道面高约为 h ≈250mm(如图2.1);刀刃重合量Δh ≈5mm; 钢板厚度Δb=1mm; 2.12.2机构设计 参数 按定尺L=1m 给出机构的行程速比系数k 、远极位传动角γ2、摇杆摆角ψ如表2-1所示。: 表2-1 参数与方案 方案 1 2 3 4 5 1.1.1.1.1. 74o 73o 72 706816 17o 182022
3、具体内容 3.1根据工艺要求制定机构方案,定性比较各方案的优、劣; 3.2设计出满足工艺要求的机构尺寸及上下剪刃的位置尺寸; 3.3根据最终设计结果按比例绘制机构运动简图及上下剪刃的轨迹; 3.4进行机构的运动及力分析,检验上下剪刃的速度相对误差、拉钢系数是否满要求,并求出曲柄上的平衡力矩M b 4、对剪机运动的要求: 4.1曲柄转一圈对钢材剪切一次; 4.2剪切时,上、下剪刃速度相对误差小于其许用值: △V 刀=2|V Et -V Ft |/(V Et +V Ft )≤ [ε] = 0.05. 4.3剪切时,上下剪刃应与钢材运动同步。 一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1: V 刀= (V Et +V Ft )/2; δ= V 刀/ V t =[δ] =1.01~1.05. 4.4能调节钢材的剪切长度L A D B C E F x y (t ) f e n 1 L a b c L △ △ V t α αα3
飞剪机
内蒙古科技大学 本科生毕业设计说明书(毕业论文)
题 目:高线 1145 飞剪机设计 学生姓名:赵 文 军 学 号:0608123223 专 业:机械设计制造及其自动化 班 级:机 2006-2 班 指导教师:刘云峰 教授
内蒙古科技大学毕业设计说明书(毕业论文) 高线 1145 飞剪机设计 摘要
飞剪机是用来剪切横向运动的轧件。他可以装设在连续式轧机的轧制作用线上。随着连续式轧 机的发展,飞剪机的到越来越广泛的应用。飞剪机的类型很多,我设计的飞剪机采用曲柄连杆形式。 传动方式利用单电机传动,机身自带一级减速器。通过曲柄轴、刀架和摆杆可使刀片在剪切区作近 似平移的运动,以获得平整的剪切断面。
设计的主要任务是:确定适合的设计方案;选择符合给定设计参数的电动机和主要的零部件,包 括轴、齿轮、刀架等。最后对机器的安装、润滑与维护做了简单的介绍。目的是设计出符合设计要 求的飞剪机。 关键词:飞剪机;电动机;减速器;润滑。
I
内蒙古科技大学毕业设计说明书(毕业论文)
1145 high-wire flying shear design
Abstract Flying Shear is used to cut horizontal movement rolling 。 He can be installed in continuous rolling mill line of action。With the development of continuous rolling mill, shearing machine to fly more and more widely used。Many types of flying shear, I design the form by connecting rod。Transmission use of a single motor drive, Body comes with a reducer. Through the crank shaft, blade knife, and the pendulum could shift in the shear zone as similar to the movement to get the flat cut section. Design of the main tasks are to determine a suitable design Chosen for a given design parameters of the motor and the main components, including shafts, gears, knife, etc. Finally, the machine's installation, lubrication and maintenance made a brief introduction. Purpose is to design a line with the design requirements of flying shear.
Key words: Flying sheer; Electric motor; Reducer; Lubricating.
II
冷轧轧机飞剪控制系统
转帖]冷轧轧机飞剪控制系统 冷轧轧机飞剪控制系统 张亮1,张期2 (1.本钢工学院,辽宁本溪117000;2.本溪钢铁集团公司冷轧厂,本溪 117000) 摘要:飞剪是轧机线的重要组成部分,本文介绍本钢冷轧连续酸洗—轧机联合机组中的轧机飞剪控制系统的控制原理及控制过程,该飞剪是目前世界上先进的飞剪设备之一。 关键词:轧机;飞剪;控制 中图分类号:TG333 文献标识码:B Flying Shear Control System in the Tandem Mill ZHANG Liang1,ZHANG Qi2 (1.Benxi Iron and Steel Engineering College,Benxi 11700,China;2. Benxi Iron and Steel Group Company,Benxi 117000,China) Abstract:The flying shear is an important part of the tandem mill line.The article introduces the structure principle of the system control and the control process of the continue pickling line coupled with the tandem mill of the cold rolling strip Bengang.The flying is one of the newest developed flying at present. Key words:tandem mill;flying shear;control 1 概述 本钢冷轧轧机电气控制系统由法国CMS公司设计与调试,轧机出口采用转鼓式飞剪(简称飞剪),其作用是不停机用于分卷剪切,使带钢平稳地过渡到另一台卷取机进行卷取,飞剪主电机状态、转速、故障报警均由计算机控制与监视,主传动采用JR4000D(FDPS)全数字直流调整系统。 2 飞剪的特点及主要技术数据 飞剪主要由刀刃、刀夹、滚筒和固定架等组成,控制系统采用可控硅反并联逻辑无环流速度控制以及带钢跟踪,刀刃跟踪控制系统。该系统剪切控制精度高,定位控制准确,飞剪剪切的技术数据如下:剪切厚度0.4~3.00mm;剪切宽度700~1525mm;剪切速度60~300m/min。 根据工艺要求,飞剪安装在距离第四机架9.100m的位置,在这短矩离之内,以确保切割精度,通过对带钢的准确跟踪和刀刃的跟踪,从而完成对飞剪的切断控制,飞剪剪切过程示意图如图1。正常运行顺序为: 停止→加速→剪切→减速→返回到初始位置→停车;若剪切失败则为:停止→加速→剪切(失败)→紧急停
飞剪控制
棒线材轧制中飞剪自动化控制 1.1飞剪对自动化和传动系统的要求 (1)飞剪的控制站采用一台西门子S7 315-2DP/PN和高速计数器模板FM350-1组成,飞剪的运动控制主要在PLC 系统中完成,基础自动化的PLC和HMI对飞剪的控制主要体现在工艺操作和显示方面,例如,合分闸、速度设定、头尾长度设定、剪切模式设定、故障报警、实际值显示等,运动控制完全移到传动系统中。基础自动化PLC对飞剪传动装置的通讯方式也为PROFIBUS-DP通讯。 (2)功率储备 因为飞剪在启动和制动时要求有足够大的加速度,所以要求电动机和整流装置有足够功率储备,一般应有2.5倍的过载
能力。虽然剪切的工作周期比较短,发热量有限,但是如果像倍尺飞剪那样间歇时间不够长,也应当考虑散热的问题。 (3)速差补偿 实际中轧件的线速度并不恒定,而剪刃的启动时间是按照轧件匀速运动的条件进行计算的,其结果使得剪切长度不准确。因此,要求传动控制系统对轧件速度变化进行补偿。通常采用速差电流的方法进行补偿。这种补偿的方法本质上是一种微分反馈的原理。补偿的原理如图1所示。 转速设定值转速实际值 速差电流 补 偿 值 电流设定值 电流实际值 系数 速差阈值 电流调节器 图1 速差电流补偿的原理图
速差电流补偿的另一个好处是使电动机的速度严格跟随设定值。在加速段中,电动机的速度波形成为标准的三角形,启动时间的计算值和实际值吻合精度很高。在减速段中,可以使剪刃按照计算值准确地停在停止位。 (4)速度检测和位置检测 目前的传动装置多用增量型脉冲编码器作为速度检测。 利用传动装置中脉冲计数功能就可以得到剪刃的位置信号。剪刃实际位置的百分值由下式求出 i P C K act ??=144420θ (3) 式中,act θ: 位置实际值; K 42: 位置计数器的计数值; C 0: 编码器每周脉冲数; P 144: 倍频数; I: 减速机减速比。 在上下剪刃的合口位置处安装接近开关,把接近开关的
飞剪机减速器及四连杆执行机构设计说明书
3.电机的选择 (1)电动机所需工作功率为w d p P η = 工作所需功率为为1000 w Fv P =,取连杆机构的急回系数k=1.4则往返时间比为7:5,求得 2.9246w P w = 32a 1234 3 0.960.990.970.60.526 ηηηηη=???=???= 2.9246 5.560.526 W d a P P W η= = = (2) 取同步转速为 1440r/min 的电机,则电机选择为: Y132M-4,P 额=7.5KW 机座号132M:D=38,E=80,H=132。 4.传动比的分配 (1)总传动比1440/min 3640/min m a w n r i n r = == (2)分配传动装置各级传动比 取V 带传动比为01 2.5,V =则减速器传动比为 01 14.4a i i = , 122312 4.493.20a i i i i ?==???==?? 5.运动和动力参数计算 ● 0轴 000005.561440/min 9550/36.9m P P KW N N r T P N N M ======g 总, ● 1轴 11101115.34576/min 9550/105.3P P KW N N r T P N N M η======g 0,
● 2轴 22321122225.13/128.3/min 9550/377.8P P KW N N i r T P N N M ηη======g 1, ● 3轴 32332233334.92/40/min 9550/1162.5P P KW N N i r T P N N M ηη======g 2, 二、 传动零件设计
飞剪控制系统
大连立达飞剪设备
飞剪控制系统 ●〖适用范围〗 控制开平线(或校平线)上的单飞、双飞、辊筒剪; 适用于钢板、铝板行业的定长切断 ●〖功能特点〗 ?■ 切断同步角度到达60°,单飞、双飞和辊筒剪软件模式在线设定; ?■ 专用改进型同步软件,适宜V形或U形刀系,保证切口线性质量; ?■ 加减速缓冲运动S曲线,减少机械冲击力,降低机械噪音; ?■ 最短切断100mm,真正实现“飞”的切断模式; ?■ 最高生产线速度:125米/分钟,最高切断次数:190片/分钟; ?■ 全程(包括加减速、停机、料尾等)实际切长误差小于±0. 3mm; ?■ 交流伺服传动系统:15KW~90KW/1000RPM~450RPM;直流系统可达260KW/500RPM; ?■ 采用电容器储能技术,可大幅节省电能(以55KW系统,20小时/天运行,年省电24万度); ?■ 切断长度和数量可在线调整,一次可设定10个生产料单;无限循环或两单循环; ?■ 自动/手动排单生产;操作方便、维护简单; ?■ 自动接料切换、自动、手动、提前减速命令等PLC全线联机信号; ?■ 10存彩色触摸屏操作,速度、长度、数量实时显示,调试可无需电脑操作;
■ 无物料模拟运行功能,方便机器调试和检修;
电脑横切系统 〖适用范围〗 瓦楞纸(硬纸板)生产线上的定尺切断机,适用于螺旋刀和直刀。 ●〖功能特点〗 ■切断同步角度到达80°,高速踢料(逃刀)功能。 ■专用改进型同步软件,适宜螺旋刀或直刀刀系,保证切口线性质量。 ■加减速缓冲运动S曲线,减少机械冲击力,降低机械噪音。 ■最短切断400mm,真正实现“飞”的切断模式。 ■最高生产线速度:280米/分钟,最高切断次数:150片/分钟。 ■全程实际切长误差小于±1mm。 ■交流传动系统:5KW~55KW/1500RPM~750RPM。 ■切断长度和数量可在线调整,一次可设定99个生产料单,并可无限循环。 ●〖系统配置〗
飞剪控制功能规格书
控制功能规格书 飞剪
一、控制设备 飞剪系统控制的设备包括:飞剪前辊道(E2)、飞剪前侧导板(HSG2)、飞剪(CS)、废料收集箱、精轧机除磷箱(DES3)、精轧除磷辊道(E3)。 二、工艺过程描述 1.剪前辊道安装在热卷箱与飞剪之间,用于将由热卷箱输送来的中间坯料运输到飞剪之间,中间坯料进入精轧机前,剪前辊道线速度与热卷箱开卷速度保持同步,中间 坯料进入精轧机后,剪前辊道线速度与F1速度保持同步。 2.飞剪前侧导板用于对中,运送轧件进入飞剪进行剪切。 3.飞剪安装在热卷箱与精轧机列之间。用于对运行中的中间坯不规则的头部和尾部进行剪切。切头时将中间坯切成凸形圆弧形,以减少中间坯咬入精轧机架时的冲击载 荷,切尾时将中间坯尾部切成后凸形,以减短常在热连轧机中出现的长长的“燕尾”。 飞剪由两台直流电动机串连驱动。电动机功率为2×500KW,额定转速为900rpm。 电动机经电机联轴器,主减速机(速比I=21.9),主联轴器与下转鼓相联接,上转 鼓与下转鼓之间通过同步齿轮相互传动。传动侧下同步齿轮设有副齿轮,副齿轮与 主齿轮之间用弹簧撑开,用以消除齿轮付之间的传动间隙,而实现无隙啮合,以保 证上、下剪刃相互位置的准确和减少齿轮付的冲击。在主电机和主减速机之间设有 制动器,制动器的作用主要是保证在剪刃停止时,保持其位置准确,而每次剪切后 的制动主要由电气来完成。转鼓飞剪主要由上、下剪鼓相向同步运转,而装在剪鼓 上的两对剪刃对中间坯实行剪切。在上、下转鼓上分别安装了切头用剪刃和切尾用 剪刃,每个转鼓上的两个剪刃成90度布置,按剪时的转动方向看,切尾剪刃在前,切头剪刃在后。这种布置方法可以使需要剪切时剪鼓的启动角增大。剪刃下有承载 刀座,剪刃刀座侧面还设有垫板,在剪刃的背面有7个角楔块籍蝶形弹簧组的弹力 使剪刃被夹紧在转鼓上。上、下转鼓啮合运行时,上下剪刃间的间隙完全依赖与安 装或装配位置来保证。在制造时应保证剪刃槽互成90度的相对位置和刃槽与同步 齿轮的相对位置的一致性。飞剪装配后,啮合的同步齿轮应与刃槽上、下剪鼓完全 相互面对面一一对应。其误差只能在很小范围内,由侧面垫板的厚度来调整。装配 后的新飞剪要保证每一对剪刃沿剪刃长度方向保持一致,还应保证切头剪刃和切尾 剪刃间的间隙相等。为适应剪切不同钢种和不同厚度的中间坯,剪刃间隙需要重新 调整。飞剪剪刃间隙调整是由一台液压马达通过行星减速机转动螺母套而迫使带止 推轴承的外螺纹套产生轴向移动。它再带着上剪鼓在轴向移动的同时,由于同步齿 轮的螺旋齿面的作用而产生微小的圆周转动。从而调整上下剪刃的间隙。应当指出 的是这样的调整,是切头、切尾剪刃间隙,同时发生相同变化,而且同一条剪刃上 轴向调整和圆周调整是同时发生的,因而经过轴向调整后,剪鼓两端部的间隙会因 为圆弧剪刃的形状所造成剪刃间隙值的附加变化。经过轴向调整之间剪刃长度方向 的间隙必然会产生不一致。所以现场调整剪刃间隙时必需要考虑这个附加变化量, 本飞剪设计上剪鼓的轴向调整量的最大值为±15mm,液压马达的驱动也是由活动液 压站接通过高压软管来实现的。剪刃重磨之后,为了使剪刃在剪鼓上仍然保持原装 配位置,必须在剪刃测量装置上先进行预调。它实质上是模拟剪刃装到剪鼓上的状 态。在该装置上根据剪刃的刃磨量,通过剪刃底面和侧面垫片使剪刃刃口保持与原 在机上的状态一致。以便确定垫片的必要厚度。当然经过预调的剪刃和垫片,重新 装入转鼓之后仍然需复查剪刃间隙和上下剪刃的重合度。本飞剪设计剪刃间隙为 0.6-0.9mm。剪刃重合度≤8mm,拆卸剪刃时蝶形弹簧组下面的活塞腔充入压力油, 压缩蝶形弹簧并顶起楔块。然后用专用吊具将剪刃吊出。每个剪刃用7台锁紧缸, 蝶形弹簧组大约有82KN的锁紧力,换剪刃的压力油是通过专门的移动式液压站提
2020年剪切力的计算方法-剪力强度公式
作者:旧在几 作品编号:2254487796631145587263GF24000022 时间:2020.12.13 第3章剪切和挤压的实用计算 3.1 剪切的概念 在工程实际中,经常遇到剪切问题。剪切变形的主要受力特点是构件受到与其轴线相垂直的大小相等、方向相反、作用线相距很近的一对外力的作用(图3-1a),构件的变形主要表现为沿着与外力作用线平行的剪切面m-面)发生相对错动(图3-1b)。 (n 图3-1 工程中的一些联接件,如键、销钉、螺栓及铆钉等,都是主要承受剪切作用的构件。构件剪切面上的内力可用截面法求得。将构件沿剪切面n m-假想地截开,保留一部分考虑其平衡。例如,由左部分的平衡,可知剪切面上必有与外力平行且与横截面相切的内力 F(图3-1c)的作用。Q F称为剪力, Q 根据平衡方程∑=0 F Q=。 Y,可求得F 剪切破坏时,构件将沿剪切面(如图3-la所示的n m-面)被剪断。只有一个剪切面的情况,称为单剪切。图3-1a所示情况即为单剪切。 受剪构件除了承受剪切外,往往同时伴随着挤压、弯曲和拉伸等作用。在图3-1中没有完全给出构件所受的外力和剪切面上的全部内力,而只是给出了主要的受力和内力。实际受力和变形比较复杂,因而对这类构件的工作应力进行理论上的精确分析是困难的。工程中对这类构件的强度计算,一般采用在试验和经验基础上建立起来的比较简便的计算方法,称为剪切的实用计算或工程计算。
3.2 剪切和挤压的强度计算 3.2.1 剪切强度计算 剪切试验试件的受力情况应模拟零件的实际工作情况进行。图3-2a 为一种剪切试验装置的简图,试件的受力情况如图3-2b 所示,这是模拟某种销钉联接的工作情形。当载荷F 增大至破坏载荷b F 时,试件在剪切面m m -及n n -处被剪断。这种具有两个剪切面的情况,称为双剪切。由图3-2c 可求得剪切面上的剪力为 2F F Q = 图3-2 由于受剪构件的变形及受力比较复杂,剪切面上的应力分布规律很难用理论方法确定,因而工程上一般采用实用计算方法来计算受剪构件的应力。在这种计算方法中,假设应力在剪切面内是均匀分布的。若以A 表示销钉横截面面积,则应力为 A F Q =τ (3-1) τ与剪切面相切故为切应力。以上计算是以假设“切应力在剪切面上均匀分布”为基础的,实际上它只是剪切面内的一个“平均切应力”,所以也称为名义切应力。 当F 达到b F 时的切应力称剪切极限应力,记为b τ。对于上述剪切试验,剪切极限应力为
飞剪机构设计说明书
飞剪机构设计说明书 一设计内容 1.根据工艺要求制定机构方案,定性比较各方案的优劣; 2.设计出满足工艺要求的机构尺寸及上、下剪刃的位置尺寸; 3.根据最终设计结果按比例绘制机构运动简图及上、下剪刃的轨迹; 4.进行机构的运动及力分析,检验上、下剪刃的速度相对误差、拉钢系数是否满足 要求,并求出曲柄上的平衡力矩Mb。 二工作原理及要求 如上图所示,摆式飞剪由四杆机构ABCD构成。上剪刃E装在连杆BC上,下剪刃F装在摇杆CD上。当曲柄AB等速转动时,将厚度为Db速度为Vt的运动
中的钢材剪成定尺(长度)为L的成品。 飞剪机运动要求: 1 曲柄转一圈对钢材剪切一次; 2 剪切时,上、下剪刃速度相对误差小于其许用值: ΔV刀=|VEt-VFt|/(VEt+VFt)<=[ ε]=0.05 3 剪切时,上下剪刃应与钢材运动同步。 一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1: V刀=(VEt+VFt)/2; δ= V刀/Vt=[ δ]=1.01~1.05 4 能调节钢材的剪切长度L 三原始数据 工艺参数 剪切力F=10T=98kN; 支座A距辊道面高约为h=250mm 刀刃生命量Δh=5mm 钢板厚度Δb=1mm 机构设计参数 按定尺L=1m给出机构的行程速比系数k、远极位传动角γ2、摇杆摆角ψ如下表所示。
四机构型综合 机构型综合的方法及一般原则 (1)固定一个构件为机架,可得到一个全铰链机构。 (2)可用移动副直接代替转动副而得到带有移动副的机构。 (3)具有两个转动副的一个构件可变换成一个高副。 (4)最简单机构原则。首先采用最简单的运动链进行机构综合,不满足要求时才采用较复杂的运动链。 (5)最低级别机构原则。采用多元连杆为机架一般不容易得到高级别机构。 (6)不出现无功能结构原则。 (7)最低成本原则。加式易难及加工成本按如下顺序递增:转动副:移动副:高副。 (8)最符合工艺要求原则。 工艺对机构的动作要求: (1)为完成剪切,上下剪刃应完成相对分合运动; (2)为剪切运动中的钢材,上下剪刃在完成相对分合运动的同时还应有沿钢材方向的运动; (3)根据以上要求可知,上、下剪刃运动轨迹之一应为封闭曲线(如图a、b、c、d 所示)。图d上、下刀刃的运动轨迹均为非封闭曲线,使得飞剪在空行程中沿钢材的逆运动方向剪切,这是不允许的。
飞剪机
1飞剪机-飞剪机剪切机构的选型 飞剪机的功能是能够横向剪切运行中的轧件,将飞剪机安装在连续轧制线上,用于剪切轧件的头、尾或将轧件切成规定的尺寸。飞剪机的设计应满足的基本要求是:剪刃在剪切轧件时要随着轧件一起运动,即剪刃应同时完成剪切与移动两个动作,且剪刃在轧件运行方向的瞬时分速度应与轧件运行速度相等。 2轧延机械-轧延机械
1. 系统概述 织物切割机用来将持续高速进给的材料,比如织物切割成一段特定的长度。材料随时被切割而不停止。这很明显比每切一次就要停下来的方式具有更高的生产能力。在此描述的应用中,每次切割之前刀架必须带着切割刀具加速到与传送带相同的速度。这种应用的解决方案是使用电子凸轮同步剪刀与传送带的运动。 在飞剪织物切割应用中,切割材料被一条不停止的传送带送给,这条传送带由一部开环电机驱动(图1)。剪刀被固定在由伺服控制的刀架上,刀架的运动与传送带平行。剪刀加速追赶切割材料的进给速度,并在正确的位置上进行切割。当切割完成,剪刀迅速减速并退回到启始位置开始下一个切割循环。这样边可以切割出等长的材料送入下一个加工工序。 这个飞剪应用主要由三块电子-机械系统构成: (1).送给传送带(主轴)-它由一台开环电机驱动,这台开环电机不受运动控制器的指令控制。电机上连接有一台编码器,这台编码器将位置信息返回给控制器。 (2).送飞剪机构(辅轴)-飞剪轴由一台闭环伺服电机控制,这台电机有运动控制器控制。这个从动轴的位置根据主动轴的位置以及预先定制的凸轮表来确定。这台伺服电机与一根引导丝杠相连,通过丝杠驱动刀具配合传送带的速度。 (3).刀具-该应用中通过输出点触发气动的刀具在适当位置切入织物中。在其他应用中,有可能用到旋转的刀具切入材料中。 图
剪切力的计算方法
第3章剪切和挤压的实用计算 3.1 剪切的概念 在工程实际中,经常遇到剪切问题。剪切变形的主要受力特点是构件受到与其轴线相垂直的大小相等、方向相反、作用线相距很近的一对外力的作用(图3-1a),构件 m-面)发生相对错动(图3-1b)。的变形主要表现为沿着与外力作用线平行的剪切面(n 图3-1 工程中的一些联接件,如键、销钉、螺栓及铆钉等,都是主要承受剪切作用的构件。构件剪切面上的内力可用截面法求得。将构件沿剪切面n m-假想地截开,保留一部分考虑其平衡。例如,由左部分的平衡,可知剪切面上必有与外力平行且与横截面相切的内力Q F(图3-1c)的作用。Q F称为剪力,根据平衡方程∑=0 F Q=。 Y,可求得F 剪切破坏时,构件将沿剪切面(如图3-la所示的n m-面)被剪断。只有一个剪切面的情况,称为单剪切。图3-1a所示情况即为单剪切。 受剪构件除了承受剪切外,往往同时伴随着挤压、弯曲和拉伸等作用。在图3-1中没有完全给出构件所受的外力和剪切面上的全部内力,而只是给出了主要的受力和内力。实际受力和变形比较复杂,因而对这类构件的工作应力进行理论上的精确分析是困难的。工程中对这类构件的强度计算,一般采用在试验和经验基础上建立起来的比较简便的计算方法,称为剪切的实用计算或工程计算。 3.2 剪切和挤压的强度计算 3.2.1 剪切强度计算
剪切试验试件的受力情况应模拟零件的实际工作情况进行。图3-2a 为一种剪切试验装置的简图,试件的受力情况如图3-2b 所示,这是模拟某种销钉联接的工作情形。当载荷F 增大至破坏载荷b F 时,试件在剪切面m m -及n n -处被剪断。这种具有两个剪切面的情况,称为双剪切。由图3-2c 可求得剪切面上的剪力为 2 F F Q = 图3-2 由于受剪构件的变形及受力比较复杂,剪切面上的应力分布规律很难用理论方法确定,因而工程上一般采用实用计算方法来计算受剪构件的应力。在这种计算方法中,假设应力在剪切面内是均匀分布的。若以A 表示销钉横截面面积,则应力为 A F Q =τ (3-1) τ与剪切面相切故为切应力。以上计算是以假设“切应力在剪切面上均匀分布”为基础的,实际上它只是剪切面内的一个“平均切应力”,所以也称为名义切应力。 当F 达到b F 时的切应力称剪切极限应力,记为b τ。对于上述剪切试验,剪切极限应力为 A F b b 2= τ