第八讲PHOTOSCAN软件操作培训
PhotoScan初学者1.0.0版
PhotoScan初学者1.0.0版
教程(初级级):
基于Agisoft PhotoScan1.0.0版三维模型重建
PhotoScan 准备
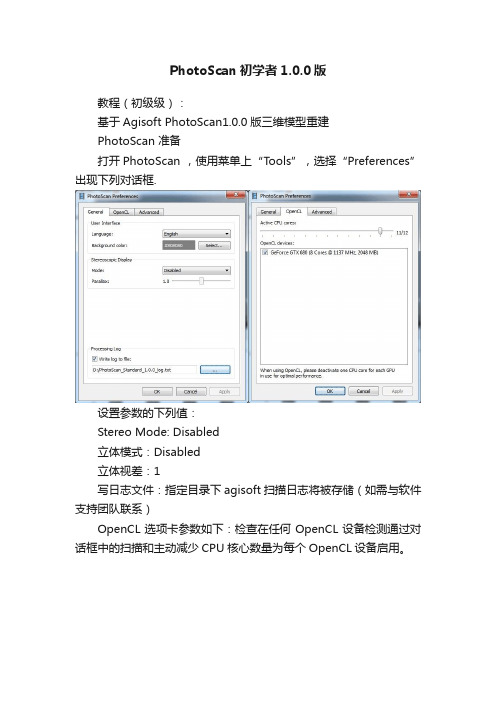
打开PhotoScan ,使用菜单上“Tools”,选择“Preferences”出现下列对话框.
设置参数的下列值:
Stereo Mode: Disabled
立体模式:Disabled
立体视差:1
写日志文件:指定目录下agisoft扫描日志将被存储(如需与软件支持团队联系)
OpenCL选项卡参数如下:检查在任何OpenCL设备检测通过对话框中的扫描和主动减少CPU核心数量为每个OpenCL设备启用。
设置高级选项卡中的参数的下列值:项目压缩级别: 6
保持深度图/存储图像的路径:disabled
绝对禁用程序启动时检查更新:Enabled
启用启用VBO支持:Disabled
Photoscan使用说明书
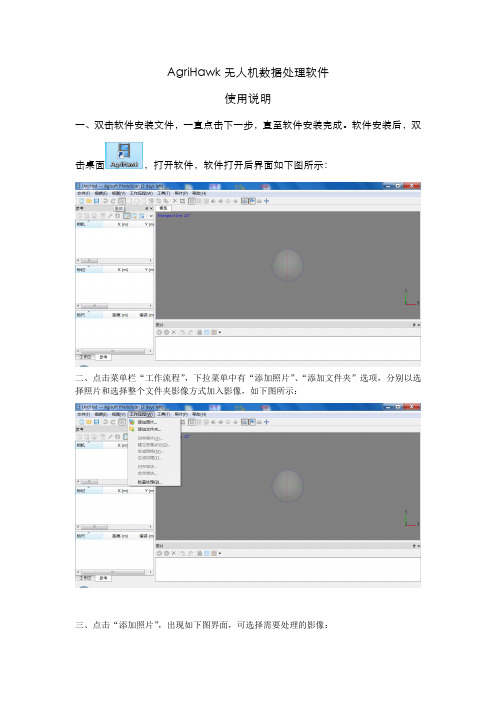
AgriHawk无人机数据处理软件使用说明一、双击软件安装文件,一直点击下一步,直至软件安装完成。
软件安装后,双击桌面,打开软件,软件打开后界面如下图所示:二、点击菜单栏“工作流程”,下拉菜单中有“添加照片”、“添加文件夹”选项,分别以选择照片和选择整个文件夹影像方式加入影像,如下图所示:三、点击“添加照片”,出现如下图界面,可选择需要处理的影像:四、选择影像后,在左侧会出现影像名列表,软件下侧会显示影像缩略图:五、双击每个缩略图,主窗口显示该张影像的大图,可以查看影像:六、如果有POS数据,点击左侧窗口“参考”栏中第一个图表,导入POS数据,若没有POS 数据可直接跳至步骤十一(POS数据为拍摄每张影像所对应的无人机位置、姿态参数,辅助拼接,拼接后的影像将具有地理坐标信息):七、点击“导入”后,弹出POS导入窗口,如下图,选择整理好的POS文档即可:八、POS导入后,选择“WGS84”坐标系统,并将各列数据与表头名称对应:九、对应好的POS界面如下图所示:十、POS数据导入后,界面中将显示POS轨迹,即无人机拍摄照片时所处空间位置:十一、点击“工作流程-对齐照片”:十二、在弹出的对话框中,精度选择“高”,成对预选选择“参考”,点击确定:十三、下图自动开始“对齐照片”处理,界面如下图,此过程只需等待,无需操作:十四、处理完成后,会生成三维点云数据,如下图所示:十五、“对齐照片”完成后,点击“工作流程-建立密集点云”:十六、在弹出的对话框中,选择所需要的质量,如下图,质量设置越高,处理速度越慢:十七,点击确定后,系统自动处理,并显示处理进度:十八、处理完成后,生成密集点云数据:十九、选择“工作流程-生成网格”,如下图:二十、在弹出的对话框中选择所需要的质量,点击确定,出现以下进度显示界面:二十一、处理完成后,生成测区光滑曲面:二十二、点击“文件-导出正射影像-导出JPEG/TIFF/PNG”,导出拼接后影像:二十三、在弹出的界面中,直接默认设置即可,点击“导出”:二十四、点击“导出”后,选择导出路径及导出文件名:二十五、点击确定后,开始导出,等待完成后,即可到相应路径下,查看拼接后正射影像。
Photoscan工作流程
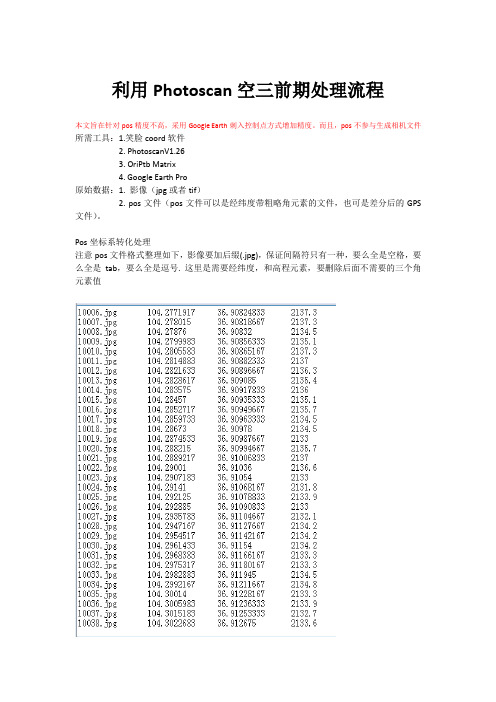
利用Photoscan空三前期处理流程本文旨在针对pos精度不高,采用Google Earth刺入控制点方式增加精度。
而且,pos不参与生成相机文件所需工具:1.笑脸coord软件2. PhotoscanV1.263. OriPtb Matrix4. Google Earth Pro原始数据:1. 影像(jpg或者tif)2. pos文件(pos文件可以是经纬度带粗略角元素的文件,也可是差分后的GPS 文件)。
Pos坐标系转化处理注意pos文件格式整理如下,影像要加后缀(.jpg),保证间隔符只有一种,要么全是空格,要么全是tab,要么全是逗号. 这里是需要经纬度,和高程元素,要删除后面不需要的三个角元素值这里我们需要将pos 大地坐标转化为平面坐标具体操作如下1.打开笑脸coord软件,设置-地图投影-2. 在投影设置里,选择高斯六度带,中央子午线设置105,其他保持不变3.点击文件转化,选择文件格式:点号经度纬度如果没有,点自定义格式设置,然后设置依次设置名称,扩展名,分隔符号,数据列表如下完成点击新建4.导入需要转换的pos文件,进行转化修改得到文件扩展名为.txt进行下一步正式处理处理流程:1. 打开photoscan,工作流-添加照片2. 在参考(reference)窗口选择导入,导入pos文件3. 选择好间隔符后,检查下X和Y值没有搞混,X为6位或8位,Y是7位,点确定4. 在主窗口界面可以浏览pos点概况5. 工作流-对齐照片,精度推荐用Low(速度快,普通和高匹配速度太慢),如果导入过pos 文件,下面可以选择参考(reference)模式,高级设置里的关键点限制和连接点限制最多不要超过默认值的2倍,也就是80000和2000。
6.检查对齐照片精度,精度小于5m说明Pos精度比较好,可以用于产生相机文件,这里由于精度不高,错误值比较大,此时采取不导入pos,产生相机文件7.当第6步中的错误有超过5的(accurac为默认的10.0情况下),则不能依据POS文件来输出自检校的相机文件。
Photoscan三维建模操作说明
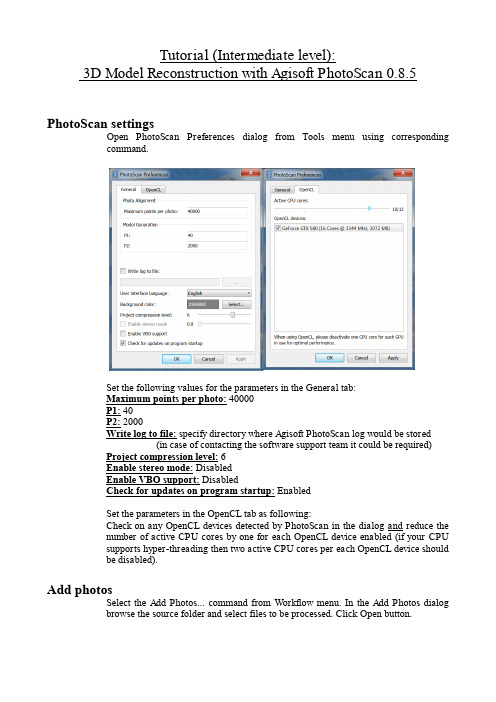
Tutorial (Intermediate level):3D Model Reconstruction with Agisoft PhotoScan 0.8.5 PhotoScan settingsOpen PhotoScan Preferences dialog from Tools menu using correspondingcommand.Set the following values for the parameters in the General tab:Maximum points per photo:40000P1:40P2:2000Write log to file:specify directory where Agisoft PhotoScan log would be stored(in case of contacting the software support team it could be required)Project compression level:6Enable stereo mode:DisabledEnable VBO support:DisabledCheck for updates on program startup:EnabledSet the parameters in the OpenCL tab as following:Check on any OpenCL devices detected by PhotoScan in the dialog and reduce thenumber of active CPU cores by one for each OpenCL device enabled (if your CPUsupports hyper-threading then two active CPU cores per each OpenCL device shouldbe disabled).Add photosSelect the Add Photos... command from Workflow menu. In the Add Photos dialogbrowse the source folder and select files to be processed. Click Open button.Mask photosTo achieve good reconstruction results it is necessary to mask all irrelevant elementson the source photos (background, turntable, accidental foreground, etc.).Open a photo with an irrelevant element in Photo View double-clicking on the photoin the Photo pane.Choose one of the selection tools from the Toolbar: Rectangular Selection forrectangular shape irrelevant elements; Intelligent Scissors–to select irregularshaped area in the photo; Intelligent Paint– to paint the selection with the mouse.To mask uniform background of the image use Magic Wand tool. First, click the Magic Wand button on the Toolbar, then click inside the area to be selected. To change the border of the automatically selected area click inside the area to be addedto the selection.Save the mask clicking Add Selection button from the Toolbar.To alter the current mask use other selection tools together with Add Selection / Substract Selection buttons on the Toolbar.Repeat the described procedure for every photo where background (irrelevantelements) should be masked.Align photosAt this stage PhotoScan refines the camera position for each photo and builds thepoint cloud model.Select Align Photos command from the Workflow menu.Set the following recommended values for the parameters in the Align Photos dialog:Accuracy:HighPair preselection:DisabledConstrain features by mask:EnabledClick OK button to start photo alignment.Select bounding boxThis step is optional since PhotoScan automatically calculates bounding boxdimensions and location. But it is recommended to check if any correction is needed,because geometry reconstruction step deals only with the point cloud inside thevolume.Adjust the Bounding box to the point cloud model using Resize Region and Rotate Region tools from the Toolbar. The whole model should be inside the Bounding box, while any outliers should be left outside the bounding box.Build geometry3D model reconstruction is a computationally intensive operation, it can take a longtime, depending on the quantity and resolution of loaded photos and selected targetquality.Select Build Geometry command from the Workflow menu.Set the following recommended values for the parameters in the Build Geometrydialog:Object type:ArbitraryTarget quality:MediumGeometry type:SmoothFace count:200000Filter threshold:0.1Hole threshold:0.5Click OK button to start building geometry.Build textureThis step could be skipped if untextured model is sufficient as the final result.Set the following recommended values for the parameters in the Build Texturedialog:Mapping mode:GenericBlending mode:AverageAtlas width and height:4096-8192Click OK button to start building texture.Export modelSelect Export Model... command from the File menu.In the Save As... dialog box select the folder for the model to be saved in, print in thefile name and choose preferred file type from the list (e.g. JPEG).Click Save button.In the Export Model dialog indicate the desired export parameters (e.g. Exporttexture). Note that the list of available exporting parameters depends on the selectedfile format.Note: Exported texture will be stored in the same folder as the 3D model with thesame file name (file type is selected by user).。
PHOTOSCAN软件操作培训

四、密集点云重建
这一步要对三维点云进行三角化处理。执行工作流程——网格重建。在菜单下有 三个选项需要选择, 表面类型(Surfacetype),选择任意(Arbitary),另一个 选项高度厂(Heightfield)针对的是航空图像。点云来源(Source data),这 里当然要选择密集点云(Dense cloud), 如果选择稀疏点云(Sparse cloud), 结果会比较差。多边形数量(Polygon count),根据需要选择,同样,数量越 多处理时间越长,默认给出了几种精度下的对应数量,也可以根据需要手动设置, 一般情况下,高(High)足矣。
Photoscห้องสมุดไป่ตู้n软件操作
三维模型重建
一、导入图片到Photoscan
这一步需要注意,对于存在有明显拍摄缺陷的图像(如虚焦、曝光过 度),要事先剔除掉。
二、对齐图片
这一步主要进行相机的标定以及稀疏重建。由于Photoscan对使用者封装了 其中的计算过程,只留了三个参数供选择。实际使用中一般只需要设置决定 计算的精确性,有高中低三个选项,精度越高计算速度越慢只要计算机硬件 性能足够,一般选择高(High);第二项成对预选(Pair preselection)一 定要选择禁止(Disabled)。图4-2:选好选项后,点击ok,计算机就开始进 行分析和重建了,一般从几分钟到几十分钟不等。
3、“菜单栏”--“工作流程”--“建立密集点云”
4、利用选择按钮,通过“平移”、“旋转”,设置工作区
5、“菜单栏”--“工作流程”--“生成网格” 表面类型:任意 源数据:密集点云
6、“菜单栏”--“工作流程”--“生成纹理”
七、此时已经生成了三维模型。通过菜单栏--“文件”--“导出模型”。
Agisoft PhotoScan-拍摄照片的教程
如何拍摄照片一个成功的摄影过程的一个关键是要有“良好”的拍摄顺序。
良好的照相顺序基于一些简单的规则。
驰摄影培训班探讨了这些规则背后的原因,并说明了如何在困难的课题面前做出明智的选择。
设备■使用的数码相机具有相当高的分辨率(5万像素或以上)。
■避免超广角和鱼眼镜头。
最好选择50毫米焦距(35mm胶片等效)镜头。
建议使用焦距20至80mm的间隔在35mm等效。
如果数据集被捕获的鱼眼镜头,适当的相机传感器类型应选择PhotoScan相机校准对话框之前处理。
■定焦镜头是首选。
如果变焦镜头使用-焦距应设置要么最大或整个拍摄会更稳定的结果中最低值。
这里有一些建议的相机/镜头的配置:■使用无损转换为TIFF文件RAW数据是优选的,因为JPG压缩诱导不必要的噪声对图像。
■拍摄图像的最大可能的分辨率。
■快门速度应该不会太慢,否则模糊可以导致轻微的运动■您可以选择的主题和焦点的距离。
然后用胶带的地方对焦环。
■使用定焦镜头,而不是变焦镜头。
如果必须使用变焦镜头,必须使用变焦的最近或最远的程度。
■光圈值应该足够高以导致足够的焦深:捕捉尖锐是重要的,没有模糊的照片。
■相机的光圈必须在拍照期间保持不变。
35mm相机,这是很好的做法不设定光圈大于f / 11小。
与孔大于f / 11小,衍射效应发生的模糊的图像,显著减少相机的分辨率。
■使用最低的ISO设置,因为较高的ISO设置,会产生更多的噪点。
这种噪点使得在不同照片像素的匹配更加困难。
■关闭防抖以及自动旋转摄像功能。
■相机应设置为光圈优先模式(优选为f / 5.6-f / 11镜头以获得最清晰的图像)。
■为了获得最好的顺序结果,要确保在拍摄一组连续的相片时不要改变相机的配置。
■如果必须要改变相机或镜头结构,那改变配置所拍的相片必须做为单独的一组数据,来做校正相机位置的动作。
对象/场景要求■避免不纹理,光泽,反射镜或透明的物体。
■如果还是要的,拍摄下一个阴云密布的天空闪亮的对象。
photoscan使用步骤
学习PhotoScan使用报告
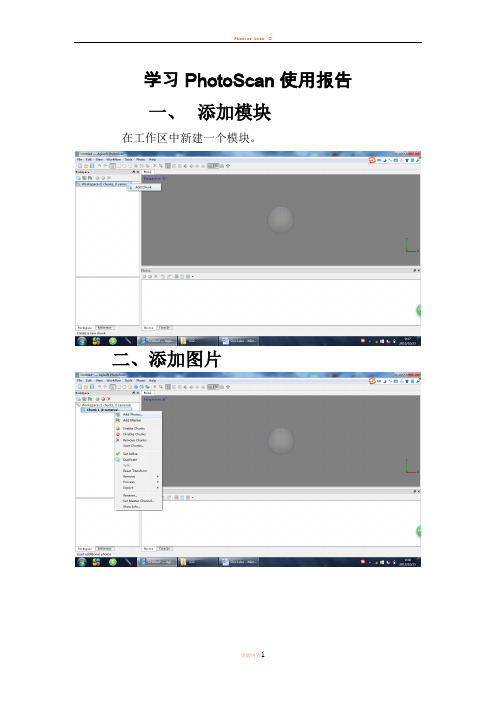
一、添加模块
在工作区中新建一个模块。
二、添加图片
三、对齐图片
注意:成对预选必须选择已禁用。
四、优化对齐方式
注意:拟合4K选项打钩。
五、生成密集点云
注意:在生成密集点云前,必须调整区域大小大于物体摸型。
点击“调整区域大小”,可以进行区域调整。
调整好区域后,依据电脑配置选择中等数量的点云。
六、生成网络
注意:表面类型选任意,源数据选密集点云
内存不够,于是在安全模式下进行网络生成。
七、生成纹理
由于并未拍摄石碑俯视照片,所以生成的石碑模型顶部有远处的树木遮挡。
使用Photoscan生成DEM与正射影像流程

使用Photoscan生成DEM与正射影像流程(使用像控点)1.参数预设使用工具菜单的工具-偏好设置打开PhotoScan Preferences对话框一般(General)选项卡上的参数设置下列值:立体模式:浮雕(如果你的图形卡支持四轴缓冲,使用硬件)视差:1.0将日志写入文件:指定Agisoft日志的目录GPU选项卡设置如下:勾选在对话框中PhotoScan检测到的任何GPU设备。
当使用少于两个GPU时,勾选“在执行GPU加速时使用CPU”高级选项卡参数设置下列值:保持深度图:启用存储绝对图像路径:禁用启用VBO支持:启用2.添加照片从工作流菜单中“添加照片”选择添加照片命令或单击工作区工具栏上的Add Photos按钮。
在添加照片对话框中浏览源文件夹并选择要处理的文件。
点击打开按钮。
3.装载相机POS文件生成的模型使用的坐标系统是由这个步骤中设置的相机POS坐标系统决定的。
如果相机位置未知,这一步可以跳过。
对齐照片这种情况下需要更多的时间。
打开视图菜单中的参考面板,在参考面板工具栏上单击“导入”按钮,并在打开的对话框中选择包含POS信息的文件。
最简单的方法是载入字符分隔的文本文件(每张照片的x-和y坐标和高度(相机方位数据,即俯仰、滚动和偏航值,也可以导入,但数据不是必须)。
然后单击参考窗格中的Settings按钮,在参考设置对话框中选择相应的坐标系统,并根据测量准确度设置照片POS精度及标记、连接点、精度,如果没有在导入POS时指定坐标系,也可以在这个面板中指定坐标系。
地面高程:在倾斜拍摄的情况下,应该指定对应坐标系统椭球面上的平均地面高度。
点击确认后,相机位置会标记在模型视图中,如果在POS数据正确的情况下无法看到相机位置,点击工具栏中的显示相机按扭,然后点击工具栏上的重置视图按钮。
4.检查相机校准打开菜单栏“工具”-“相机校准”窗口。
默认情况下,Photoscan将在对齐照片和优化的过程中通过照片的相应参数自动估算矫正参数,如果相机相关参数缺失可以手工输入。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四、密集点云重建
这一步要对三维点云进行三角化处理。执行工作流程——网格重建。在菜单下有 三个选项需要选择, 表面类型(Surfacetype),选择任意(Arbitary),另一个 选项高度厂(Heightfield)针对的是航空图像。点云来源(Source data),这 里当然要选择密集点云(Dense cloud), 如果选择稀疏点云(Sparse cloud), 结果会比较差。多边形数量(Polygon count),根据需要选择,同样,数量越 多处理时间越长,默认给出了几种精度下的对应数量,也可以根据需要手动设置, 一般情况下,高(High)足矣。
三、稀疏点云重建
稀疏点云重建之后,我们可以大体上看到重建场景的样貌,其中红色部 分代表的是相机空间矩阵,主要是方便检查校验相机信息,被红色部分包围 的就是重建目标,可以看出,房屋的主体轮廓和纹理信息已经基本成型红色 部分之外的点云是一同被恢复出的场景信息,虽然是我们不需要的东西,而 且在拍摄图像是并没有特意兼顾,但是可以发现其三维重建点云依然可以接 受可见算法的强大!通过点云编辑工具将不需要的部分删除,下一步就要开 始密集点云重建了。
六、生成三维模型
处理完后生成的三维模型如下图
七、导出三维模型
在导出模型时选择.obi格式,利用Smart3D浏览器打开。
Photoscan软件操作步骤
1、打开photoscan软件,然后点击“菜单栏”--“工作流程”--“添加照片”
2、“菜单栏”--“工作流程”--“对齐照片” 此处“成对预选”选择“已禁用” 精度:越高越好,处理时间越长
3、“菜单栏”--“工作流程”--“建立密集点云”
4、利用选择按钮,通过“平移”、“旋转”,设置工作区
5、“菜单栏”--“工作流程”--“生成网格” 表面类型:任意 源数据:密集点云
6、“菜单栏”--“工作流程”--“生成纹理”
七、此时已经生成了三维模型。通过菜单栏--“文件”--“导出模型”。
五、建立纹理
纹理指的是表面的图案信息。Photoscan 不仅能恢复模型,还 能将通过空间映射得到的纹理信息转换成二维图像,用以配合模型 输出到其他三维软件(3d Max、Autocad 等)进行后续处理。执行 工作流程(Workflow)——建立纹理(Build Texture),一般情况下, 不需要做任何修改,保留默认信息确定就可以。 至此,三维重建过程基本结束,模型三角面在数百万左右,经实物 测量验证,模型主要结构误差为厘米级。从全过程来看,人工参与 的过程已经大大简化,时间成本也很低,半天时间就能得到以往几 天都很难得到的结果,而且可以一次批量处理多个重建过程,人力 劳动强度大大降低!当然,对于模型仍有很多要继续调整修改的地 方,有些地方的结果也不是很好,但是瑕不掩瑜,这个可以后续完 善。
Photoscan软件操作
三维模型重建 一、导入图片到Photoscan
这一步需要注意,对于存在有明显拍摄缺陷的图像(如虚焦、曝光过 Fra bibliotek),要事先剔除掉。
二、对齐图片
这一步主要进行相机的标定以及稀疏重建。由于Photoscan对使用者封装了 其中的计算过程,只留了三个参数供选择。实际使用中一般只需要设置决定 计算的精确性,有高中低三个选项,精度越高计算速度越慢只要计算机硬件 性能足够,一般选择高(High);第二项成对预选(Pair preselection)一 定要选择禁止(Disabled)。图4-2:选好选项后,点击ok,计算机就开始进 行分析和重建了,一般从几分钟到几十分钟不等。