基于液晶标靶的坐标测量方法
位置度测量方法 靶标
位置度测量方法靶标位置度测量方法是现代测量技术中的一种重要方法,它通过测量目标物体在空间中的位置信息,来实现对目标物体的精确定位。
在实际应用中,位置度测量方法具有广泛的应用领域,包括工程测量、导航定位、地理信息系统等。
下面将从测量原理、测量仪器和常见应用领域三个方面来介绍位置度测量方法。
一、测量原理位置度测量方法的基本原理是通过测量目标物体与参考物体之间的相对位置关系,来确定目标物体的绝对位置。
常见的测量原理包括三角测量法、距离测量法和角度测量法。
1. 三角测量法:三角测量法是基于三角形的几何关系来测量位置的一种方法。
通过测量目标物体与测量仪器之间的角度和距离,结合已知的基线长度,利用三边定位或者三角定位原理,可以计算出目标物体的位置坐标。
2. 距离测量法:距离测量法是通过测量目标物体与测量仪器之间的距离来确定位置的方法。
常见的距离测量方法包括直接测距法、间接测距法和无线测距法等。
其中直接测距法是最常用的方法,它利用测距仪等设备直接测量目标物体与测量仪器之间的距离。
3. 角度测量法:角度测量法是通过测量目标物体与参考物体之间的角度来确定位置的方法。
常见的角度测量方法包括方位角测量、水平角测量和垂直角测量等。
这些角度测量方法可以通过全站仪、经纬仪等测量仪器来实现。
二、测量仪器位置度测量方法需要使用各种测量仪器来实现,常见的测量仪器包括全站仪、测距仪、经纬仪、水准仪等。
1. 全站仪:全站仪是一种综合测量仪器,可以同时实现角度测量、距离测量和高程测量等功能。
它具有高精度、高速度和多功能等特点,广泛应用于建筑测量、道路测量和地形测量等领域。
2. 测距仪:测距仪是一种专门用于测量距离的仪器,常用于三角测量法和距离测量法。
根据测量原理的不同,测距仪可以分为激光测距仪、电子测距仪和超声测距仪等。
3. 经纬仪:经纬仪是一种用于测量方位角和水平角的仪器。
它通常由望远镜、水平仪和刻度盘等组成,可以通过观测天体的位置来确定测量点的方位角和水平角。
基于光学标靶与测距仪的隐藏区域坐标测量

基于光学标靶与测距仪的隐藏区域坐标测量范宜艳;赵斌;马国鹭【摘要】为了解决大型装备中隐藏区域的空间坐标测量问题,提出一种基于光学标靶与测距仪的激光测头,该测头与全站仪或激光跟踪仪构成非接触测量系统。
测量时,激光测距仪发出的激光对准被测点测得其距离,用全站仪或激光跟踪仪瞄准光学标靶,实时获取激光测头的空间坐标,同时激光测头测得其自身的空间姿态角,然后通过坐标变换得到被测点的空间坐标;并进行了实验验证。
结果表明,该测量系统可以使得组合测量的量程扩大并保持较高的空间坐标测量精度。
%In orderto solve the coordinate measurement of hidden parts in large equipment , a laser probe based on optical target and rangefinder was proposed , which was combined with a total station instrument or a laser tracker to form a non-contact measurement system .During the measurement , the laser beam from the rangefinder was set to touch the measurement point and the distance between the rangefinder and the point wasmeasured .And then, the optical target was aimed at by the total station instrument or the laser tracker .The spatial coordinates and the attitude angles of the laser probe were gotten.Finally, the spatial coordinates of the measured point was calculated by coordinate transformation .After theoretical analysis and experimental verification , the results show thatthe measurement system could expand the measurement range and achieve reliable and higher measurement precision .【期刊名称】《激光技术》【年(卷),期】2014(000)006【总页数】6页(P723-728)【关键词】测量与计量;空间坐标测量;隐藏区间;非接触测量;激光测距仪【作者】范宜艳;赵斌;马国鹭【作者单位】华中科技大学机械科学与工程学院,武汉430074; 湖北工业大学机械工程学院,武汉430068;华中科技大学机械科学与工程学院,武汉430074;华中科技大学机械科学与工程学院,武汉430074【正文语种】中文【中图分类】TH761空间坐标的测量在工业领域中有着广泛的需求,如航天航空领域、船舶工业、高速列车、卫星天线等大型装备领域[1]。
空怏旋转标靶光电速测分辩应付办法

空怏旋转标靶光电速测分辩应付办法光电速测技术是一种应用于射击训练和竞赛中的测速技术,它能够对射击过程中的弹道速度进行实时测量和分析。
而空怏旋转标靶是一种特殊的标靶装置,能够在射击过程中实时变换位置和姿态。
因此,研究如何在空怏旋转标靶光电速测中有效分辩和应付各种情况具有重要意义。
本文将围绕这一主题展开探讨,并提出相应的应付办法。
首先,针对空怏旋转标靶光电速测中可能出现的速度分辩问题,我们可以采取多通道测速的方法。
传统的光电速测技术往往只能实现单道测速,因此对于速度分辩要求较高的情况容易出现误差。
而采用多通道测速的方法,可以同时对弹道上不同位置的速度进行测量,从而提高速度分辨率。
例如,我们可以在空怏旋转标靶上设置多个光电传感器,并将其与测速系统相连,实现对不同位置速度的即时测量和分析。
这样一来,无论目标是静止的还是运动的,都能够准确地分辨出其速度。
其次,针对空怏旋转标靶光电速测中可能出现的姿态变化问题,我们可以采取自适应跟踪的方法。
由于空怏旋转标靶会在射击过程中实时变换位置和姿态,传统的光电速测方法很难在这种情况下准确测量速度。
因此,我们可以引入自适应跟踪算法,在测速系统中设置一个可调整的跟踪参数。
这个参数可以根据标靶的姿态变化进行实时调整,从而保证测速系统能够精确地跟踪标靶的运动,并实时测量其速度。
最后,针对空怏旋转标靶光电速测中可能出现的多目标同时射击问题,我们可以采取多目标跟踪的方法。
空怏旋转标靶通常会模拟多个目标在不同位置出现的情况,这给光电速测带来了挑战。
然而,如果我们能够在测速系统中设置多个光电传感器,并利用高速数据传输和处理技术,就能够实现对多个目标同时测速的需求。
通过合理的数据分析和算法设计,可以对各个目标的速度进行准确测量和分析,从而满足多目标射击训练和竞赛的需要。
综上所述,针对空怏旋转标靶光电速测中的几个主要问题,我们可以采取多通道测速、自适应跟踪和多目标跟踪等方法进行应付。
这些方法在提高速度分辨率、跟踪姿态和测量多目标速度方面都能够起到积极的作用。
基于针型靶标的相机标定方法研究
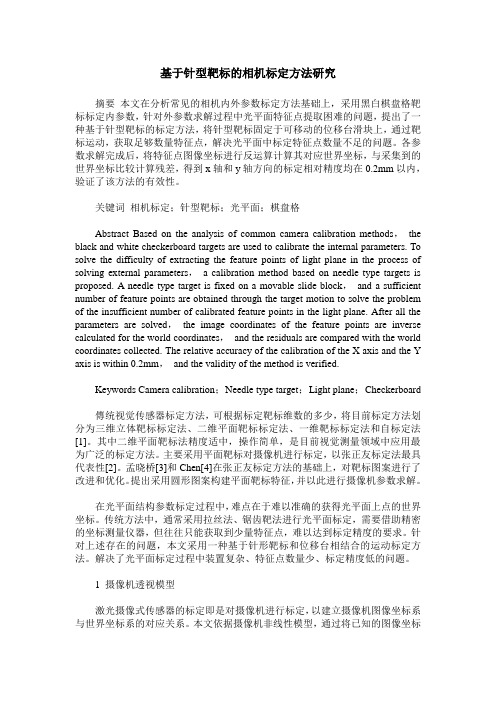
基于针型靶标的相机标定方法研究摘要本文在分析常见的相机内外参数标定方法基础上,采用黑白棋盘格靶标标定内参数,针对外参数求解过程中光平面特征点提取困难的问题,提出了一种基于针型靶标的标定方法,将针型靶标固定于可移动的位移台滑块上,通过靶标运动,获取足够数量特征点,解决光平面中标定特征点数量不足的问题。
各参数求解完成后,将特征点图像坐标进行反运算计算其对应世界坐标,与采集到的世界坐标比较计算残差,得到x轴和y轴方向的标定相对精度均在0.2mm以内,验证了该方法的有效性。
关键词相机标定;针型靶标;光平面;棋盘格Abstract Based on the analysis of common camera calibration methods,the black and white checkerboard targets are used to calibrate the internal parameters. To solve the difficulty of extracting the feature points of light plane in the process of solving external parameters,a calibration method based on needle type targets is proposed. A needle type target is fixed on a movable slide block,and a sufficient number of feature points are obtained through the target motion to solve the problem of the insufficient number of calibrated feature points in the light plane. After all the parameters are solved,the image coordinates of the feature points are inverse calculated for the world coordinates,and the residuals are compared with the world coordinates collected. The relative accuracy of the calibration of the X axis and the Y axis is within 0.2mm,and the validity of the method is verified.Keywords Camera calibration;Needle type target;Light plane;Checkerboard傳统视觉传感器标定方法,可根据标定靶标维数的多少,将目前标定方法划分为三维立体靶标标定法、二维平面靶标标定法、一维靶标标定法和自标定法[1]。
激光标靶位姿测量系统的建模与误差分析

第13卷第4期2015年7月DOI 10. 13494/j . npe. 20140069 纳米技Nanotechnology and Precision Engineering杨文辉,林嘉容,高扬,等.激光标靶位姿测量系统的建模与误差分析[1].纳米技术与精密工程,2015,13(4):293一298.VoL 13 No.4 JuL 2015 Yang飞可enhui ,Lin Jiarui , G ao Yang , e t a1. Modeling and enor analysis oflaser t旺吕et l'ose measurement system [J J . Nanotechnologyαnd Preâsiοn Engineering, 2015,13(4): 293-298(in Chir削叫.激光标靶位姿测量系统的建模与误差分析杨文辉1,林嘉睿1,高扬1,孟祥瑞ljp 剑2(1.测试技术及仪器国家重点实验室(天津大学)) 摘要:针对大尺寸组合精密测量的需求,提出一种新型激光标靶位姿测量方法.首先介绍了其测量原理,并采用方法求解相机坐标系和激光标靶坐标系的位姿关系,构建了该测蚤系统的数学模型.基于此模型分析了测量系统关键词:激光标靶;位姿测量;数学模型;误差分析中图分类号:TH 741 文献标志码:A 文章编号:1672-6030(2015)04-0293-06Modeling and Error Analysis of Laser Target Pose Measurement SystemYang W enhui , L in J iarui , G ao Yang , M eng X iangrui , Z ou J ian2( 1. State Key Laboratory of Precision Measuring Technology and Instruments (Tian j in Uni飞rersity ),Tianjin 300072, China: 2. Department of Optics and Ele础Abstract: Regarding the demand of large size composite preeision measurement , a new method for la回r target pose measurement system was proposed. F irst, the measur:ing principle was introduced , and the 1'elationship hetween incident light pose and position of the camera target spot was estahlished by using the nonpa1'ametric model calibration method hased on interpolation . T he position relationship between camera coo1'dinate and laser target coordinate was solved hy using hack-calculation method hased on reference p1'ism , and the overall mathematieal model was estahlished . T hen fo1' this model , the error sources of the measurement system were analyzed and the simulation results of factors which affect measurement aecuracy we1'e given. F inally , the feasihility and effectiveness of the model proposed was verified hy expe1'iment .Keywords: lase1' target; pose measurement; mathematical model; elTor analysis源设备制造和监测等领域中.大尺寸空间内的位姿测量发挥着重要作用[]目前位姿测量面临着测量空间测量方法难以满足需求L 川.基于多种测量方法结合的组合削量方法逐渐成为发展需要.激光标靶位姿测量收稿日期:2015-02-16.基金项目:高等学校博士学科点专项科研基金(20130032120067 ) .伟者简介:杨文辉(1992一) ,男,硕士生.通讯作者:林嘉睿,讲师,li 叩@tju. edu. cn .是利用激光标靶配合全站仪或激光跟踪仪等测量仪器德国的V M T 系统[川5叮]等.在测量目标姿态的俯仰角和滚角仪完成;在测量方位角时,需要在全站仪上安装准直.294. 纳米技术与精密工程第13卷第4期激光器,并且保证其轴线和全站仪内部测距仪轴线平行.国内华中科技大学开发了基于CCD摄像机和倾角度不超过0.5目标构成的T-M ac 6D激光跟踪位姿测量系统川,其姿态角测量精度为0.010(0.17mr ad ) ,姿态角测量基于单标上至少4个发光点,从而解算被测目标的姿态,但其在成像时易被遮挡,测量范围受相机视场的限制.上述激光标靶测量系统安装要求高、测量效率和精度低,T-M ac 6D激光跟踪位姿削量系统无法满足大尺寸组合精密测量需求.针对上述问题,天津大学精密和倾角仪,具有便携性好、测量范围广和精度高等优统.本文构建了该测量系统的数学模型,并对模型中影_._.�步验证模型的可行性和有效性.1 激光标靶位姿测量系统的数学模型1. 1 坐析、系定义激光标靶位姿测量系统主要由激光标靶和全站仪棱镜、倾角{义、相机以及嵌入式系统等部件组成.激光标靶位姿测量系统坐标系定义如图1所示.O X 1'Z 是参考坐标系,即全站仪坐标系。
LCD十字标线定位检测

LCD十字标线定位检测摘要本文介绍液晶显示器(LCD)的制程中相关之检测工作,并针对液晶显示器基板之定位微影装置详加说明,在液晶显示器基板组装过程里,如何使基板公十字标线精确的与母十字标线对准是相当重要的步骤。
在文中描述如何使用微影技术之机器视觉识别系统,利用CCD影像检测器抓取LCD板公、母十字标线之影像后,以影像处理设备与个人计算机所构成的检测系统予以分析,再透过三轴位移控制及输送带与真空吸附装置,让上下两片LCD基板能精准组合。
液晶显示器及其制程简介液晶材料具有流动的特性,因此只需外加很微小的力量,液晶分子即运动而产生不同的排列状况,如图1以最常见普遍的向列型液晶为例,借着电场作用造成液晶分子转向,由于液晶的光轴与其分子轴相当一致,由此产生光学效果,而如果我们将液晶一开始就适当的安排其排列方向,那么当加于液晶的电场移除消失时,液晶分子会因为其本身的弹性及黏性,而十分迅速的回复原来未加电场前的状态。
(A)未加电场前(B)加电场后图1 借着电场作用造成液晶分子转向,由此产生光学效果LCD显示器技术集合材料、光学、机械及电学等科技,在制程检测方面,亦可见到各式各样的作法[1-5]。
目前液晶基本上皆是由人工合成,故在液晶分子的特性上可做较为理想的设计,而直接改善LCD显示的品质。
由图2中可清楚看出LCD的显示原理以及其基本架构。
电极OFF状态电极ON状态图2 LCD的显示原理以及其基本架构近几年由于电子产业与半导体科技的发展,液晶显示器应用了液晶原理与半导体制程,在品质及价位方面都有长足的进步,在色彩呈现方面直逼CRT映像管,因此在近年来出现供不应求的迹象,1995年时还有供过于求的现象,到了1996年由于笔记型计算机与个人数字助理(PDA)需求量大增,因此开始广为流行,从1997年以后许多液晶显示器制造商订单应接不瑕的情况看来,液晶显示器已成为近年的显示器主流。
LCD制造流程是以TN及STN制程为基础,其全线为自动化生产流程,此生产线有一中央控制室可监控生产流程[6],如图3所示。
基于液晶靶标的多CCD线结构光测量系统全局标定

基于液晶靶标的多CCD线结构光测量系统全局标定贾倩倩;王伯雄;赵博华;罗秀芝【期刊名称】《光学精密工程》【年(卷),期】2009(017)012【摘要】为了对多CCD线结构光测量系统进行精确快速的全局标定,研究了一种基于液晶平面靶标的多CCD全局标定方法.首先,将液晶靶标放入光平面,在靶标上显示一系列特征点,然后进行各个CCD同步采集.通过时间序列对应特征点的图像坐标与靶标坐标,建立起像平面与靶标平面间的非线性模型,对形位关系已知的标准块进行测量,利用标准块的形位关系对像平面与靶标平面间的非线性模型进行优化,得到像平面与光平面间的映射关系,从而完成多CCD的全局标定.利用优化后的标定结果进行测量,结果表明,在自由曲面类物体的测量中,3个摄像机的数据拼接精度高,对标准块上特征点距离测量的RMS误差为0.217 mm,角度测量的绝对误差为±0.2°.该方法快速简便,适合现场操作,已在多CCD线结构光测量系统中得到了实际应用.【总页数】7页(P2990-2996)【作者】贾倩倩;王伯雄;赵博华;罗秀芝【作者单位】清华大学,精密仪器与机械学系,精密测试技术及仪器国家重点实验室,北京,100084;清华大学,精密仪器与机械学系,精密测试技术及仪器国家重点实验室,北京,100084;清华大学,精密仪器与机械学系,精密测试技术及仪器国家重点实验室,北京,100084;清华大学,精密仪器与机械学系,精密测试技术及仪器国家重点实验室,北京,100084【正文语种】中文【中图分类】TP391;TP212.14【相关文献】1.足部三维测量系统中CCD传感器的全局标定 [J], 刘国忠;王伯雄;史辉;罗秀芝;张明照;王瑞2.基于自由靶标的线结构光视觉测量系统标定研究 [J], 杨凯;余厚云;杨超3.基于线结构光的三维测量系统转轴快速标定方法 [J], 李鹏飞;张文涛;熊显名4.基于线结构光测量系统标定的研究 [J], 刘孜恒5.基于神经网络的振镜式线结构光三维测量系统的标定 [J], 杨林林;杨树明因版权原因,仅展示原文概要,查看原文内容请购买。
校正靶标志物投影的识别与坐标数据提取算法

Ab t a t sr c Ai n t h rb e t a ti df c l t d n i n xr c h r e n c ir t n g i mi g a e p o lm h ti s i i ut o i e t y a d e t tte ma k ro a b ai r t f f a l o d,t e p p r r p s d a meh d o h a e o o e t o f p
i n ̄igadet c n e re r’ tnacrig ote hrc r t s fh a ba o r s w .Fr l, h e o e vst d t n n x at gt kr o co codn’ aat ii ec irt ng di n it tem t dr ei r i h ma p j i e t hc e sc o t l i i to sy h moe h e
Kewod y rs
C ir i d D l i n rs n Ma e po c o Ie t ct nadet co l tn abao i t nadeoi ao o r r r etn dni a o n x atn k j i i f i r i
c odi tso v r d man re a c aed c o d n o t e i e s c c o dia e . Ex rme t d m o ta e t tt p o o e me h d a o r nae fe e y o i a c ult a c r i g t h ntr e t o r n ts l pe i n e nsr td ha he r p s d t o c n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作者简 介: 边心 田( 7一 , , 1 8) 男 山东淄博人 , 9 讲师 , 士, 博 主要从事光学三维传感和视觉测量等研究
3 : 2
淮阴师范学院学报( 自然科学 )
液 晶标 靶
第 1 卷 1
被 测物 体
图 1 坐 标 测量 原 理 图
其中,为 零尺 子, l 口 。是系 参 s 非 度因 A=l l 统内 数矩阵, , 分别是 轴上的尺 0 其中 , 度因 0 0 lJ
Ma x.2 2 01
基 于液 晶 标 靶 的 坐 标 测 量 方 法
边 心 田,程 菊 ,姬保 卫
( 阴师范学院 物理与电子电气工程学院 , 淮 江苏 淮 安 230 ) 230
摘 要 : 出一种基 于 液 晶标 靶 的坐 标 测 量 方 法 . 提 通过 最 小 二 乘优 化 的方 法确定 摄 像 机 主点 与坐标 测量 头 的坐标 转换 关 系 , 合摄像 机 外参 数确 定测 量 头的 三维坐标 , 结 将摄 像机 用于 光学 三维坐标 的测量 , 出了相机 移 动时 的坐标 变换 公 式 和 移动 距 离 的计 算 方 法 . 提 实验 结果 表 明, 平 面标 靶标 定 点数量 显著 增 多 , 精确提 取 标定 点 , 像机 的标 定结 果更 加准 确 . 方法 简单 、 可 摄 该 可 靠 , 以准确 的得 到 光学 坐标 测 量结 果 . 可 关 键词 :光 学坐标 测量 ;条纹分 析 ;摄像 机 标定 ;坐标 变换
在辅助测量棒坐标系中的坐标在测量前已经精密测定 . 通过计算辅助测量棒上测点的坐标从而得出该
点 的三维 坐标 . 本文 在辅 助测 量棒 的基 础上 , 出一 种新 的基 于反 向摄影 的光 学 坐标 ’ 量 方法 . 这 种方 法 中 , 提 钡 0 在 测
量仪器包括两部分 : 一部分是在三维方向上可 以自由移动 的测量头 , 测量头上 固定一个摄像机 ; 另一部 分是用一个液晶显示屏作为二维的平面测量标靶 . 二维平面标靶的改变 , 同时解决了标靶上标记点的数 量以及定位精度的问题 . 测量头在摄像机坐标系中的坐标可 以预先精密测定 , 利用标定靶上 的条纹信息 建立了摄像机坐标系与标靶所在的世界坐标系之间的关系 , 就可以计算 出测点在世界坐标系中的坐标 .
删
在求解成像模型的内、 外参数时, 先不考虑畸变通过按照针孔模型求解线性方程组得到摄像机的线性内 参数 和外参 数 . 然后利 用这 些值 作为初 始值 , 人有 畸变 参数 的成像 模 型 , 用优 化 算 法求 解 非 线性 方 代 利 程组 得到 摄像 机 的内 、 外参 数 的精确值 .
1 标 定 测量 原 理
在针 孔模 型 中 , 间任 意一 点 P在世 界坐标 系 中的坐标 可表示 为 ( w Y , w , 像点 P在 图像 坐 空 X ,w Z )其
s
[ 辜 】:] i ] [A ] [ 辜[ : ; ]妻 [
c ・
收稿 日期 : 0 11.2 2 1-21
12 摄相 机光 心的坐 标与 测量 头的关 系 .
首先 , 将测 量头放 于一 固定 点 , 机 从不 同 的角度拍 摄 条 纹 图 , 为摄像 机 是 固定 于可 以三 维方 摄像 因
子, y是 “, 轴不垂 直 因子 , , ) 主点 坐标 . 转矩 阵 尺与平 移 向量 t 为摄像 机 的外部 参数 . ( 为 。 旋 均 由于摄 像机 的光 学系统 , 一般 会存 在不 同程 度 的畸变 . 设针孔 模 型下像 点在 图像 坐标 系下 的坐标 为 ( , ,, 际情况 下在 图像坐标 系中 的坐 标 为 ( , ) 、 y)实 y , y方 向上 的非 线性 畸变 分别 为 、 , 畸变 值 与像 点在 图像 中的位 置有关 , 可用 下式 表达 :
中图分 类号 : 4 8 2 0 3 . 文献 标识 码 : A 文章 编号 :6 167 (0 2 0 .0 10 17 .86 2 1) 1 3—4 0
0 引 言
光学三维传感技术具有非接触 、 快速 、 精度高 、 动化程度高 、 自 经济等优点 , 已得到大量深入研究并 且 被 广泛 应用 l 1 用 光学 三维 传感技 术进 行 坐标 测 量 , 1. - 采 5 首先 要 对 测量 系 统 进行 标 定 m , J系统 标 定 的
( , )= k x( + )+( 13 + y )+2 2 Y Y 1 x P (X 2 pX )
I ,‰l a x)
>
y
( , )= k ( 2+ l )+( 2 3 + y )+2 l Y Y 2 X , 。 P (X 2 p ) X
k , P ,: k , P 为畸变 参数 , 一般情 况 下 , 阶径 向畸 变足 以描述 非线 性 畸变 . 一 因此 , r: ̄ ( + y ) 令 / 2, 结 合 ()式 , 机 成像模 型可 表示 为 : 1 摄像 ,
第 1 卷第 1 1 期
21 0 2年 3月
淮 阴师范学院学报( 自然科学 )
J R A FH AY NT A H R O L G ( a r c ne OU N L O U II E C E SC LE E N t a Si c) ul e
v 1 1 N . 0. 1 o 1