线控转向汽车转向盘转角传感器的容错控制策略
线控转向前轮转角控制策略研究

பைடு நூலகம்
I I 5 化
线控转 向前轮转 角控制 策略研 究
Resear ch on cont r ol s t r a t egy o f f r ont c or ner of st eer - b y- wi r e vehi cl e
胡乐乐’ ,时 岩’ ,蔡焱焱 ,李桂银’ ,陈 佼’
侧 向加 速度 的考 虑 。 设 计 的变 传 动 比 是基 于汽 车 的 线性 二 自 由度 动 力 学 模 型 ,并 且 是 在 不 同的 速 度 区 间 使 用 不 同 方 法 确 定 的 ,这 样 可 以更 有 效 的 保 证 汽 车 在 整 个 速 度 区 域 内的 行 驶 稳 定性 。 低速 时 ,汽 车 的侧 向 加 速 度 易控 制 , 因此 选 用 的方 法 是 基 于 稳 态 横 摆 角 速 度 增 益 的方 法 。高 速 时 选 用 的是 基 于 稳 态 侧 向加 速 度 增 益 的方 法 。考 虑 到 汽 车 在 中速 行 驶 的 工 况 是 汽 车 行 驶 最 多 的工 况 ,在 中速 时 采 用 稳 态 横 摆 角 速 度 增 益 和 稳 态 侧 向加 速 度 增 益 联 合 控 制 的方 法 。 基 于 线 性 二 自 由度汽 车 模 型 ,横 摆 角 速 度 ( 1 ) , 和 前轮 转 角 6 有:
M f L
+
策略 以实 现汽 车 的理 想转 向显得尤 为重 要 。 理想传动 比的确定是线控转 向的核心技术 , 目前 的 线 控 转 向技 术 研 究 中 ,理 想 传 动 比 的 确 定 大 多 只考 虑 横 摆 角速 度 ,对 高 速转 向过 程 中 的 侧 向 加 速 度 考 虑 较 少 。此 外 ,高 速 转 向过 程 中 如 何
线控转向汽车传感器的智能容错设计

第2卷 第5 9 期
文 章 编 号 :0 6 9 4 (0 2 0 — 3 3 0 10 — 3 8 2 1 ) 5
真
22 月 0 年5 1
线控 转 向汽 车传 感 器 的智 能 容错 设计
吴方 圆 , 孔 峰 。 江云 姚
( 广西工学院电子信 息与控制 工程 系 , 广西 柳州 5 50 ) 4 06 摘 要 : 汽车线控转 向优化控制 的研究 中, 在 汽车传感器容错技术模型精确度低和易受扰动影响等 问题 , 造成 汽车的安全性能 受 到影 响。针对传统解析关 系模 型精度低 , 采用 了邻域粗糙集模 型对 传感器信 息进 行预处理 , 以精 确找出与容错 对象存 用 在解析关 系的相关联传感器信息 ; 了消除观测器 的扰动影响 , 为 利用 了神经网络组建容错对 象的冗余信息 , 将关 联传感器信 号作 为径 向基神经 网络 的输入 , 容错对象 的信号用作进行监督训 练。利用神经 网络 的估计输 出和容错 对象的输 出差值 , 即 残差是否超 出门限来实现故障判别 , 在残差超过门限后进行输出控制 , 屏蔽故障传感 器输 出, 可用神经 网络 的估计 输出来完
成信号补偿 。通过仿真表 明, 改进设计具有较好的抗噪性和逼近能力 , 能很好的完成故障检测和信号补偿 , 到容 错控制的 达
目的 。
汽车线控转向系统的研究

汽车线控转向系统的研究一、本文概述随着汽车技术的不断发展和创新,汽车线控转向系统作为一种先进的转向技术,正在逐步改变传统的机械转向方式,为驾驶者带来更加安全、舒适和智能的驾驶体验。
本文旨在对汽车线控转向系统进行深入的研究,分析其工作原理、技术特点、应用现状以及未来发展趋势,以期为汽车工程领域的发展提供有益的参考和借鉴。
本文首先介绍了汽车线控转向系统的基本概念和组成结构,阐述了其与传统机械转向系统的区别和优势。
接着,文章重点分析了线控转向系统的工作原理,包括转向信号的传递、控制策略的实现以及转向执行机构的动作等。
在此基础上,文章还探讨了线控转向系统在提高车辆稳定性、操控性以及安全性等方面的技术特点和应用优势。
本文还综述了国内外汽车线控转向系统的研究现状和发展趋势,分析了当前线控转向系统面临的挑战和未来的发展方向。
文章指出,随着智能化、电动化等技术的不断发展,汽车线控转向系统将进一步优化和完善,为未来的智能交通和自动驾驶技术提供有力支持。
本文总结了汽车线控转向系统的研究意义和价值,强调了其在推动汽车产业技术进步和产业升级方面的重要作用。
文章也指出了当前研究的不足之处和未来的研究方向,以期为相关领域的研究人员提供有益的参考和启示。
二、汽车线控转向系统基本原理与组成汽车线控转向系统,又称为线控转向系统(Steer-by-Wire,简称SBW),是一种新型的转向技术,它通过电子信号传递转向指令,取消了传统的机械连接,实现了转向系统的完全电气化。
这种系统的基本原理和组成部分,对理解其工作方式和性能优化具有重要意义。
线控转向系统的基本原理在于,驾驶员通过方向盘发出转向指令,这个指令通过传感器转化为电信号,然后通过电子控制单元(ECU)处理,最终通过执行机构实现车轮的转向。
这个过程中,电子控制单元是关键,它负责处理传感器信号,并根据车辆状态、驾驶员意图和道路环境等因素,计算出最合适的转向角度和转向力矩,实现车辆的稳定、安全和舒适行驶。
基于线控转向的主动转向控制策略研究
基于线控转向的主动转向控制策略研究近年来,随着汽车制造技术的飞速发展,越来越多的车辆开始使用电子线控转向系统,以提高车辆的稳定性、舒适性和安全性。
作为一项重要的车辆控制技术之一,线控转向技术在车辆行驶安全方面发挥着越来越重要的作用。
本文旨在探讨基于线控转向的主动转向控制策略。
线控转向技术是一种可以实时调整转向角度和方向的控制系统,在高速行驶和紧急制动的情况下能够提高车辆的稳定性,并且在崎岖路面和陡坡行驶时能够提供更好的处理能力。
传统的转向系统需要通过传感器收集车辆运动状态的信息,并将其转换为控制信号输出给伺服驱动器,而线控转向技术使用电子控制单元实时调整转向角度和方向,不仅提高了转向的精度,而且可以快速响应紧急情况,更加安全可靠。
基于线控转向技术的主动转向控制策略,主要是通过感知周围环境的传感器,以及车辆实时变化的状态信息,实时调整转向角度,从而实现车辆稳定性和操控性的提升。
该策略还可以通过预测车辆的运动轨迹,及时地对转向进行优化调整,以保证驾驶员和车辆的安全。
其中,转向角度的调整主要是基于瞬时转向半径的变化来进行的。
在车辆行驶过程中,路面的各种变化,例如弯度、坡度等,都会影响到车辆的转向半径。
当车辆面对转弯路口、车道变化或紧急制动时,转向半径的变化会导致车辆的侧倾、失控等危险情况发生。
这时,主动转向控制策略就可以通过调整转向角度来保证车辆的稳定性和安全性。
另外,在转向控制策略中,还需要考虑车辆的动态性能和稳定性能。
在高速和复杂的道路条件下,车辆的稳定性要求更高,而在低速和简单的道路条件下,车辆的操控性要求更高。
因此,主动转向控制策略需要根据车辆的不同性能要求,灵活调整转向角度和方向,以达到最佳的车辆性能。
总之,基于线控转向技术的主动转向控制策略可以实现车辆的稳定性和安全性的提升。
未来,随着智能化和自动化技术的不断发展,基于线控转向的主动转向控制策略将更加精准和智能,为驾驶员提供更加便捷和安全的驾驶体验。
基于线控转向的主动转向控制策略解析

基于线控转向的主动转向控制策略解析发布时间:2023-01-29T05:53:55.986Z 来源:《科技新时代》2022年9月16期作者:朱联邦[导读] 随着相关技术的发展,朱联邦安徽江淮汽车集团股份有限公司安徽合肥 230601摘要:随着相关技术的发展,促进了电子技术、汽车控制技术、人工智能等技术发展,智能汽车已经是未来汽车发展的重要趋势,线控转向技术的出现,非常符合当下汽车发展需求,运用线控转向改变了机械转向结构,而且灵活性更强,同时还有效地改善和提高了汽车转向的特性。
因此加强对线控技术研究,符合汽车行业的未来发展。
关键词:线控转向;主动转向;控制策略转向系统是汽车底盘当中不可缺少的部分﹐主要的作用就是在静止和行驶状态下,根据驾驶员驾驶意图行驶。
从汽车诞生开始转向系统也在不断地更新,而线控转向技术的出现,有效地改善了汽车转向特征。
随着科技的不断发展,无人驾驶、自动驾驶、智能汽车等先进技术的出现,促进了汽车技术发展,尤其是线控技术不断成熟的情况下,使这些先进的汽车安全性更高,稳定性更强。
线控转向作为全新的转向系统,不仅拥有机械转向功能,还具备了一些其他特征。
所以探索线控转向技术探索,可以很大程度推动汽车行业发展。
1线控转向系统基本情况分析1.1系统构成完整的线控转向系统,主要有以下三个部分构成。
第一,是ECU控制器。
ECU是重要的控制单元,也是线控转向系统的核心,主要功能就是接收、处理、输出各种相关控制信号。
当ECU接收到输入转向意图信号时,车辆就会立刻响应和反馈这个信号,然后根据预先设置的策略输出控制指令,从而控制转向系统机,不仅保证了输出转角,同时也完成了驾驶意图,通过这些信息可以确保驾驶者能够感知汽车运行状态,还有路面的相关信息。
第二,是方向盘模块。
驾驶员输入转向意图时,通过传感器将意图转换为物理信号,然后转换成数字信号,并传递到ECU控制单元。
当电机接收到ECU信号指令以后,就会做出相应动作,保证驾驶者可以感知运行状态。
线控转向系统技术综述与实车应用(二)

◆文/江苏 高惠民线控转向系统技术综述与实车应用(二)(接2022年第6期)六、SBW系统的路感反馈控制汽车转向系统主要有两大功能:一是操纵转向,驾驶员通过操纵转向盘来控制转向轮绕主销转动;二是反馈路感,将整车及轮胎的运动状态、受力情况通过转向盘反馈给驾驶员,即路感。
前者驾驶员是输入,实现转向系统的角位移功能;后者是将路感反馈给驾驶员,实现力传递功能。
二者结合,构成了汽车转向过程中的“人一车—路”的闭环控制。
1.转向盘力矩分析 驾驶员在操纵车辆过程中,转向盘操纵转矩与转向盘转角、车速以及路面附着情况等密切相关。
为了让驾驶者能够清晰地触摸到这些信息,所设计的SBW转向盘上力矩模型(图9),充分考虑转向盘力矩影响因素,如反馈力矩、摩擦力矩、阻尼控制力矩、限位控制力矩以及主动回正力矩,这些可以看作转向盘上的反作用力。
所建立模型是这些力矩的总和。
(1)反馈力矩根据车辆行驶状态反馈给驾驶员的力矩,其大致反映了车辆的行驶状态和路面状况。
在相关标准和文献的研究中,大量的研究结果表明车速、转向盘转角、侧向加速度与转向盘转矩之间存在密切联系。
①汽车低速行驶时,其侧向加速度的变化较小,驾驶员不易感知到此车身信息的变化,但是对转向盘转角变化却非常敏感,因而在设计路感时,转向盘转角和车速信息要占比较大的权重。
②汽车高速行驶时,由于受到车辆操纵稳定性的制约,转向盘在较小的范围内转动,此时转角的变化对侧向加速度的影响很大,驾驶员对侧向加速度变化反而很敏感,因而在设计路感时,要重点考虑侧向加速度和车速对转向盘力矩的影响。
③汽车在高、低速之间行驶时,此时的车速越大,则转向盘力矩越大。
驾驶员对侧向加速度和转向盘转角都较为敏感,因而在设计路感时,不仅要考虑转向盘转角的影响,也要将侧向加速度和车速对转向盘力矩的影响考虑进去。
(2)摩擦力矩在机械结构中,摩擦力矩是一直存在不可忽略的。
而SBW系统因断开了转向管柱与转向器间的连接,所以驾驶员能够直接感受到的摩擦力矩只来源于转向盘总成。
线控转向系统路感控制策略的研究

线控转向系统路感控制策略的研究*于蕾艳1,,林逸2,施国标2(1 中国石油大学机电工程学院,山东东营, 257061;2 北京理工大学机械与车辆工程学院,北京 100081)摘要:线控转向系统取消了转向盘与转向轮的机械连接,所以必须通过电机向驾驶员实时反馈路感,从而使驾驶员感知车辆行驶状态和路面状况,作出正确操纵行为。
本文提出了路感的评价指标,并根据转向角度和车速计算轮胎回正力矩,研究了不同力传动比对输入阻抗和转向盘力阶跃响应性能的影响。
随车速调整力传动比,可获得驾驶员期望的转向感觉。
结果表明,调整力传动比参数可获得良好的路感和回正性。
提出的路感控制策略双纽线试验和蛇行实验性能良好,可改善汽车的操纵稳定性。
关键词:线控转向 路感 输入阻抗中图分类号:U270.11 文献标识码:AResearch on of Steer-by-Wire System Road Feel Control StrategyYu Lei-yan1,, Lin Yi2, Shi Guo-biao2(1 College of Mechanical and Electronic Engineering, China University of Petroleum, Dongying,Shandong 257061, China; 2 School of Mechanism and Vehicle Engineering, BeijingInstitute of Technology, Beijing 100081, China)Abstract: Steer-by-Wire system cuts off the mechanical link between steering wheel and steered wheels ,so it has to feedback road feel real time to the driver with motor to enable the driver sense vehicle state and road state and handle correctly. Evaluation indexes of road feel are prescribed and tire alighning torque is calculated based on steering angle and velocity and effects of different torque ratios on input impedance and steering wheel torque step response are researched. Diver’s expected steering feel can be attained adjusting torque ratios according to velocities. Results show that adjusting torque ratio can achieve both good road feel and return ability.. “8” experiment and slalom experiment performances of prescribed road feel control strategy are good and can improve vehicle handling and stability.Keywords: Steer-by-Wire (SBW);road feel ; input impedance1 引言转向盘相当于一个重要的感观部件,在汽车-驾驶员-路面之间传递信息。
汽车线控转向系统控制研究

汽车线控转向系统控制研究摘要:为了提高汽车线控转向系统操纵稳定性,对其控制策略进行了研究。
首先,通过分析系统运动学微分方程,采用Matlab/Simulink软件构建汽车线控转向系统的仿真模型。
设计基于车轮转角的改进滑膜控制策略,在双移线变道工况和阶跃信号转向工况下进行多次联合仿真试验。
结果表明,改进的滑膜控制具有良好的控制效果,此研究的线控转向系统可以提高车辆转向操纵的稳定性。
前言由于汽车线控转向系统取消了传统的机械连接,因此必须采用合理的控制策略来实现方向盘与转向执行机构之间的信号传输,以确保转向的准确性和安全性。
文献[1]设计了一种电机转速模型观测器,以便实时监测由于系统参数变化所带来的低频干扰,并对其进行了补偿。
文献[2]通过分析转向系统的几何结构,采用模糊自适应PID控制,有效地抑制了电流误差,提高了助力力矩的精确度。
文献[3]系统地总结了汽车线控转向系统的发展,并分析了线控转向系统的关键控制策略。
文献[4]利用BP神经网络模拟出不同工况下的转向助力矩,仿真结果表明,车辆具有良好的转向轻便性。
SBW系统工作环境较为复杂,容易受到外界干扰的影响,方向盘与转向电机之间的信号转换与传输过程的准确性尤为重要。
本次研究将建立基于前轮转角误差控制的系统模型,以改善系统控制的有效性,提高汽车线控转向的准确性。
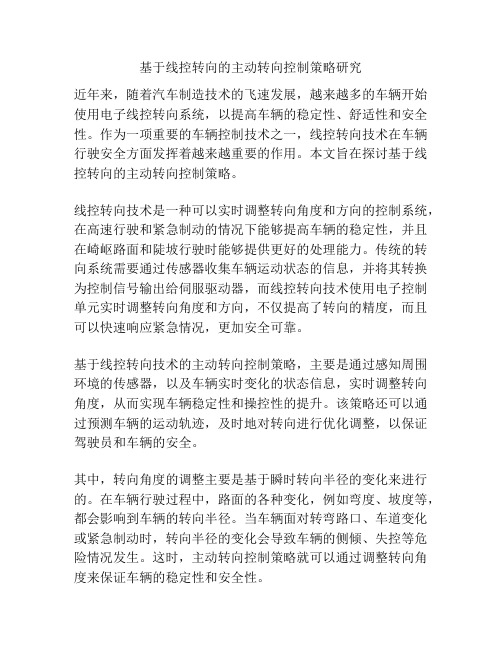
1 线控转向系统工作原理及动力学建模1.1 线控转向系统结构与工作原理线控转向系统主要是由方向盘模块和转向执行模块组成,其组成如图1所示。
当汽车转向时,传感器将方向盘的转角、转矩信号传递到主控制器ECU。
ECU根据方向盘转角、转矩及车辆状态等信息,经计算处理后,得到转向电机驱动电流,并通过电机驱动器将其施加给驱动电机,以控制转向执行电机,输出相应的转矩,从而保证汽车稳定转向。
路感电机可以根据路面信息模拟出相应的路感信息,并通过方向盘传递给驾驶员,使其掌握车辆在路面的行驶状态,从而加强对车辆的操控。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
然估计的方法,逐步迭代,使观察值 O 相对于模型 λ
HMM 模型 的 参 数 全 部 优 化 完 成 后, 应 用 Forward速对所有的多维高斯 HMM 模型进行评估, 选择发 生概率最大的多维高斯 HMM 作为当前驾驶工况。 的参数,并在实时采集来的传感器数据后面添加各 选取对应当前驾驶工况的多维高斯 HMM 模型 Backward 算法,实时采集的转向盘传感器数据和车
( 观察序列 ) 。 每一个状态与其可能的观察值之间
图1
线控转向系统结构示意图
掘模型的隐含成分,即找出最优的状态序列( 一个辨 式。 问题 2 主要在于最优状态序列的定义, 即最优
来最好地解释给定的观察序列。 问题 2 可以用来挖
识问题 ) 。 与问题 1 不同, 问题 2 的解会有很多形
号,传递给控制器模块,同时接收控制器模块传来的 相应的路感信息。
隐式马尔可夫模型
型训练过程为: 将选取的模型初始参数 λ = ( Ⅱ, A, B) 和观察序列 O = ( O1 , O2 ,…, O T ) 代入重估公式,
隐式马尔可夫模型是在马尔可夫链的基础上发 展起来的。 它包含双重的随机过程: 马尔可夫链和 到的,观察者只能看到基于状态产生的模型的输出 一般的随机过程。 在 HMM 里, 状态是不能直接看
久性错误。 同时, 根据车辆自身状态和转向盘转角
上的冗余设计, 以防止单转角传感器故障引起的永
本文中将转向盘模块的转角传感器进行了硬件
[3] 中利用滑模观测器, 建立了线控转向执行机构
传感器的容错控制方法; 文献 [4] 中利用自适应渐 消卡尔曼滤波技术, 构建了线控转向执行机构传感 器的容错控制方法。 目前, 国内外的研究成果大多
何磊,等:线控转向汽车转向盘转角传感器的容错控制策略
· 速、转向盘转角 Welch 算法对不同车速下的紧急转向、 正常转向和 器和线控转向试验台, 结合 HMM 用于评估的 For然后借助美国国家仪器公司的 PXI 1042 实时控制
和转向盘角速度的数据, 对数据预处理后, 用 Baum-
2015 年( 第 37 卷) 第 3 期
汽 车 工 程 Automotive Engineering
2015( Vol. 37) No. 3
2015057
线控转向汽车转向盘转角传感器的容错控制策略 *
何 磊1 ,马伯祥2 ,宗长富1
( 1. 吉林大学,汽车仿真与控制国家重点实验室,长春 130022 ; 2. 中国第一汽车股份有限公司技术中心,长春 130011 )
有转向盘转角、转向盘角速度和车速 3 个混合分量; c im 为对应状态 i 的第 m 个混合分 量 的 混 合 系 数;
直线行驶工况对应的 HMM 模型的参数进行优化。
的平均值和协方差。 O 为观察值,可表达为 角速度和车速。
型,对当前行驶工况进行实时辨识,并预测下一时间 性。 整个模型构建和预测传感器数据的过程如图 2
前言
各相关研究机构对线控转向系统的故障诊断和容错 控制进行了广泛的研究
[1]
为了保证汽车线控转向系统安全可靠地工作, 。 汽车线控转向系统容错
还比较少。
3 部分。 其中, 传感器的种类多、 故障率高, 对它的 故障诊断和容错控制研究显得十分重要。 汽车线 控 转 向 系 统 的 传 感 器 容 错 控 制 方 法; 文 献 文献[2] 中利用传统的卡尔曼滤波器, 提出了
据) 在最终的模型参数下产生的概率最大。 HMM 模 型参数训练应用的算法为 Baum-Welch 算法 [8] 。 Baum-Welch 算法是多次迭代优化的算法。 模 求得一组新参数 λ = ( Ⅱ, A, B ) , 使 P ( O | λ) > P ( O |
2
2. 1
多维高斯 HMM 建模
控制的研究对象主要包括传感器、 电机和电控单元
信号,使用隐式马尔可夫模型( hidden Markov model, HMM) 进行车辆行驶状态的辨识, 预测下一时间步 的车辆转向盘转角, 以软件冗余方式来实现转角传 错控制。 值作为转向盘转角值, 实现转向盘转角传感器的容 感器的故障定位, 将没有故障的转角传感器的测量
ward-Backward 算法和优化后的各多维高斯 HMM 模
步的转角传感器的数据值。 通过预测值和传感器采 集到的数据比较, 验证采集到的传感器数据的正确 所示。
和采用 K-means 算法 [9] 获得的模型初始参数, 运用
Baum-Welch 重估算法的递归思想, 采用一种最大似 到一个定值,此时的 λ 即为所求的模型参数向量。 发生的概率 P ( O | λ) 逐渐增大, 直到 P ( O | λ) 收敛
[ Abstract]
Based on multi-dimension Gaussian hidden Markov model and by adopting hardware and software
Keywords: vehicle; steer-by-wire; rotation angle sensor; fault-tolerant control; hidden Markov model 是针对线控转向系统中转向执行机构部分的传感器 进行的,而针对转向盘转角传感器的容错控制研究
Fault-tolerance Control Strategy for the Steering Wheel Angle Sensor of a Steer-by-wire Vehicle
1. Jilin University, State Key Laboratory of Automobile Simulation and Control, Changchun 130022; 2. R&D Center, China FAW Co. , Ltd. , Changchun 130011
力学角度很难建立转向盘模块与整车之间的关系方
程。 而转向盘模块又通过转角传感器将驾驶员的转 向意图转换成电信号, 发送给控制器模块。 为避免 单个转角传感器故障带来的永久性错误, 对转向盘 转角传感器进行二倍硬件冗余设计, 再利用软件算
法预测转角传感器的值, 完成对转角传感器的故障 定位,从而实现转角传感器的容错控制。
* 国家自然科学基金(50775096) 资助。
1
线控转向系统的结构
原稿收到日期为 2013 年 4 月 6 日,修改稿收到日期为 2013 年 11 月 4 日。
· 328 ·
汽
车
工
程
2015 年( 第 37 卷) 第 3 期
控制器模块和转向执行模块 3 部分。 具体的线控转 向系统结构示意图如图 1 所示。
器的容错控制策略,并通过硬件在环试验进行了验证。 结果表明,该策略可应用于线控转向汽车转向盘转角传感器 的容错控制,有效提高其安全性和可靠性。
[ 摘要]
以多维高斯隐式马尔可夫模型为基础, 采用软硬件冗余技术, 提出了线控转向汽车转向盘转角传感
关键词:汽车;线控转向;转角传感器;容错控制;隐式马尔可夫模型
λ) 。 也就是,经过重估公式计算得到的参数 λ 与原 始的参数 λ 相 比 能 更 好 地 表 示 观 察 序 列 ( 训 练 数 不再明显。 2. 2 多维高斯 HMM 建模和参数确定
据) 。 不断重复迭代这个过程直到模型参数 λ 变化 鉴于 HMM 处理时间序列的能力和强的统计学
2015( Vol. 37) No. 3
线控转向系统按功能划分,可分为转向盘模块、
的关系通过一般的随机过程描述; 状态间的转移通 过马尔可夫链描述 [5] 。 因此,借助这两个随机过程, 能透过 HMM 产生的观察序列, 得到状态时间序列 和模型的相关信息。 以下 3 个基本问题。 问题 1:给定观察序列 O = ( O1 ,O2 ,…,O T ) 和模 型 λ,计算 P ( O | λ) , 即计算模型产生观察序列的概 观察序 列 的 匹 配 程 度。 问 题 1 通 常 采 用 ForwardBackward 算法来解决 [6] 。 问题 2:给定观察序列 O = ( O1 ,O2 ,…,O T ) 和模 型 λ,确定一个最佳的状态序列 Q = ( S1 ,S2 ,…,S T ) , 率。 这可以用来解决评价问题, 或检验一个模型与 用 HMM 来处理实际的研究课题时, 需要解决
He Lei1 , Ma Boxiang2 & Zong Changfu1
redundancy techniques, a fault-tolerance control strategy for the steering wheel angle sensor of a steer-by-wire vehicle is proposed and verified by a hardware-in-the-loop experiment. The results demonstrate that the strategy proposed can be applied to the fault-tolerance control of steering wheel angle sensor in a steer-by-wire vehicle, effectively improve the safety and reliability of the angle sensor.
式中:M 为观察序列中的混合分量的个数,本文中共 N[ O,μ im ,U im ] 为高斯函数,μ im ,U im 分别为高斯函数 式中 a( t) 、b ( t ) 和 c ( t ) 分别为转向盘转角、 转向盘 根据一定车速范围内的转向盘传感器信号 O O( t)= { a( t) ,b( t) ,c( t) } (3)
状态序列,使得 P ( Q | O, λ) 最大。 在实际中并没有 一个“ 最佳” 的定义,基于动态编程的 Viterbi 算法 [7] 得到的结果通常是满意的, 但并不能保证它是绝对 意义的“ 最优” 。 问题 3:调节模型参数使 P ( Q | O,λ) 最大。 问题 1 和问题 2 求解的前提都是已知模型参数