采用双直流电流滞环调节器的矢量控制PWM变频调速系统
双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证

双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真目录目录 (1)中英文摘要 (2)摘要 (2)Abstract (2)正文 (3)双闭环可逆直流脉宽PWM调速系统设计 (3)设计分析 (3)主电路设计 (8)电流调节器参数计算 (9)信号产生电路 (11)GTR驱动电路原理 (12)辅助回路设计 (13)转速给定电路设计 (13)转速检测设计 (14)MATLAB仿真设计 (15)双闭环调速系统仿真框图 (15)仿真结果 (15)结果分析 (19)总结 (20)参考文献 (21)中英文摘要摘要直流电机由于具有速度控制容易,启、制动性能良好,且在宽范围内平滑调速等特点而在冶金、机械制造、轻工业等工业部门中得到广泛应用。
直流时机转速的控制方法可以分为两类,即励磁控制法与电枢电压控制法。
本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。
长期以来,直流电动机因其具有调节转速比较灵活、方法简单等特点,一直在传动领域占有统治地位。
本文对双闭环可逆直流PWM调速系统进行了较深入的研究,从直流调整系统原理出发,逐步建立了闭环直流PWM调整系统的模型。
AbstractWith dc motor speed control is easy, rev, braking performance is good, smooth and in wide range speed adjustment characteristics in metallurgy, machinery manufacturing, light industry, etc. Is widely used in the industrial sector. The rotational speed of dc timing control method can be divided into two categories, namely excitation control method with the armature voltage control method. This paper mainly studies the dc speed regulation system, it mainly consists of three parts, including parts, power control, direct current motor. For a long time, the dc motor because of its adjustment speed is more flexible, simple method and so on, have been occupied dominant position in the field of transmission.In this paper, the double closed-loop irreversible dc PWM speed regulating system, a further study from the principle of dc adjusting system, gradually establish a closed-loop dc PWM adjustment model of the system.正文双闭环可逆直流脉宽PWM调速系统设计设计分析双闭环调整系统的传动系统结构图直流PWM控制系统是直流脉宽调制式调速控制系统的简称,与晶闸管直流调速系统的区别在于用直流PWM变换器取代了晶闸管变流装置,作为系统的功率驱动器,系统构成原理图如下所示:直流PWM传动系统结构图其中属于脉宽调制调速系统主要由调制波发生器GM、脉宽调制器UPM、逻辑延时环节DLD和电力晶体管基极的驱动器GD和脉宽调制(PWM)变换器组成。
双闭环可逆直流脉宽PWM调速系统设计之欧阳法创编

《交直流调速系统》课程设计学院:机电工程学院学号:3115102056专业(方向)年级:电气工程及其自动化2011级学生姓名:曾台坤福建农林大学机电工程学院电气工程系2014年12 月11 日交直流调速课程设计任务书3一、题目3二、设计目的3三、系统方案的确定4四、设计任务5五、课程设计报告的要求6六、参考资料6交直流调速课程设计说明书7一、方案确定72.1.1 方案选定72.1.2桥式可逆PWM变换器的工作原理 (9)2.1.3系统控制电路图112.1.4双闭环直流调速系统的静特性分析122.1.5双闭环直流调速系统的稳态结构图12二、硬件结构132..2.1 主电路142.2.2 泵升电压限制15三、主电路参数计算和元件选择162.3.1 整流二极管的选择162.3.2 绝缘栅双极晶体管的选择17四、调节器参数设计和选择182.4.1调节器工程设计方法的基本思路182.4.2 电流环的设计182.3.7确定时间常数192.4.3选择电流调节器结构202.4.4选择电流调节器参数202.4.5计算ACR的电阻和电容212.4.6转速环的设计222.4.7 反馈单元24三.心得体会25交直流调速课程设计任务书一、题目双闭环可逆直流脉宽PWM调速系统设计二、设计目的1、对先修课程(电力电子学、自动控制原理等)的进一步理解与运用2、运用《电力拖动控制系统》的理论知识设计出可行的直流调速系统,通过建模、仿真验证理论分析的正确性。
也可以制作硬件电路。
3、同时能够加强同学们对一些常用单元电路的设计、常用集成芯片的使用以及对电阻、电容等元件的选择等的工程训练。
达到综合提高学生工程设计与动手能力的目的。
三、系统方案的确定自动控制系统的设计一般要经历从“机械负载的调速性能(动、静)→电机参数→主电路→控制方案”(系统方案的确定)→“系统设计→仿真研究→参数整定→直到理论实现要求→硬件设计→制版、焊接、调试”等过程,其中系统方案的确定至关重要。
转速电流双闭环控制的H型双极式PWM直流调速系统

设计题目及分析设计题目:转速电流双闭环控制的H 型双极式PWM 直流调速系统直流电动机:UN=48V ,IN=3.7A ,nN=200r/min 允许过载倍数λ=2;电枢回路电磁时常L T =0.015s ,机电时常m T =0.2s ;PWM 环节的放大倍数:S K =4.8,;电枢回路总电阻:R=1Ω;电枢电阻Ra=0.5Ω。
电流反馈系统β=1.33V/A ,转速反馈系数α=0.05V ·min/r ,电动势转速比Ce=0.18V ·min/r 。
转速电流调节器输入输出限幅电压**nm im U U ==10V.采用MA TLAB 对双闭环系统进行仿真,绘制直流调速系统仿真框图,仿真得出启动转速,起动电流,直流电压Ud ,ASR,ACR 输出电压的波形。
并对结果进行分析。
直流调速系统具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动中获得了广泛应用。
本文从直流电动机的工作原理入手,建立了双闭环直流调速系统的数学模型,并详细分析了系统的原理及其静态和动态性能。
然后按照自动控制原理,对双闭环调速系统的设计参数进行分析和计算,利用Simulink 对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。
在理论分析和仿真研究的基础上,本文设计了一套实验用双闭环直流调速系统,详细介绍了系统主电路、反馈电路、触发电路及控制电路的具体实现。
对系统的性能指标进行了实验测试,表明所设计的双闭环调速系统运行稳定可靠,具有较好的静态和动态性能,达到了设计要求。
采用MATLAB 软件中的控制工具箱对直流电动机双闭环调速系统进行计算机辅助设计,并用SIMULINK 进行动态数字仿真,同时查看仿真波形,以此验证设计的调速系统是否可行。
一、双闭环直流调速系统的工作原理1、双闭环直流调速系统的介绍双闭环调速系统的工作过程和原理:电动机在启动阶段,电动机的实际转速(电压)低于给定值,速度调节器的输入端存在一个偏差信号,经放大后输出的电压保持为限幅值,速度调节器工作在开环状态,速度调节器的输出电压作为电流给定值送入电流调节器, 此时则以最大电流给定值使电流调节器输出移相信号,直流电压迅速上升,电流也随即增大直到等于最大给定值, 电动机以最大电流恒流加速启动。
电力电子技术课程设计直流双极式可逆PWM调速系统

目录1 任务分析 (1)1.1概述 (1)1.2双闭环调速系统的结构图 (2)1.3桥式可逆PWM变换器的工作原理 (2)1.4PWM调速系统的静特性 (4)2 电路设计 (5)2.1给定及偏移电源 (5)2.2双环调节器电路 (6)2.2.1 电流调节器 (6)2.2.2 转速调节器 (6)2.3信号产生电路 (7)2.4驱动电路 (9)2.5转速及电流检测电路 (10)3 调节器的参数整定 (11)3.1电流调节器参数的计算 (11)3.2转速调节器参数的计算 (12)3.3参数的校验 (13)3.3.1 电流参数的校验 (13)3.3.2 转速参数的校验 (14)3.3.3 校验退饱和转速超调量 (15)4 心得体会 (16)参考文献 (17)附录 (18)直流双极式可逆PWM调速系统设计1 任务分析1.1 概述采用脉冲宽度调制的高频开关控制方式,形成脉宽调制变换器—直流电动机调速系统,简称直流脉宽调速系统或直流PWM调速系统。
脉宽调制变换器是把脉冲宽度进行调制的一种直流斩波器,脉宽调制,是利用电力电子开关器件的导通与关断,将直流电压变成连续的直流脉冲序列,并通过控制脉冲的宽度或周期达到变压的目的。
与V-M系统相比,PWM系统在很多方面有较大的优越性:1)主电路线路简单,需用的功率器件少。
2)开关频率高,电流容易连续,谐波少,电机损耗及发热都较小。
3)低速性能好,稳态精度高,调速范围宽,可达1:10000左右。
4)若是与快速响应的电机配合,则系统频带宽,动态响应快,动态抗干扰能力强。
5)功率开关器件工作在开关状态,道通损耗小,当开关频率适中时,开关损耗也不大,因而装置效率高。
6)直流电流采用不控整流时,电网功率因素比相控整流器高。
由于有以上优点直流PWM系统应用日益广泛,特别是在中、小容量的高动态性能中,已完全取代了V-M系统。
为达到更好的机械特性要求,一般直流电动机都是在闭环控制下运行。
双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证

双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证双闭环可逆直流脉宽调制(PWM)调速系统是一种常见的电机调速控制方案。
该系统通过两个闭环来实现电机的速度控制和电流控制,从而实现精准的调速效果。
本文将介绍双闭环可逆直流脉宽PWM调速系统的设计原理,并使用MATLAB进行仿真验证。
设计原理:该系统由以下几个主要部分组成:1.输入信号:输入信号一般是一个速度设定值,表示期望电机的转速。
该信号可以通过人机界面或其他控制系统输入。
2.速度控制环:速度控制环根据输入信号和反馈信号之间的差异来控制电机的转速。
常见的速度控制算法有比例控制、积分控制和微分控制。
3.脉宽调制器:脉宽调制器根据速度控制环输出的控制信号来生成PWM信号,控制电机的转速。
通常使用的脉宽调制算法有定时器计数法和比较器法。
4.电流控制环:电流控制环根据PWM信号和反馈信号之间的差异来控制电机的电流。
常见的电流控制算法有比例控制、积分控制和微分控制。
5.电机驱动器:电机驱动器将电流控制环输出的控制信号转换为电机驱动信号,驱动电机正常运转。
MATLAB仿真验证:为了验证双闭环可逆直流脉宽PWM调速系统的性能,可以使用MATLAB进行仿真。
以下是一种基本的MATLAB仿真流程:1.定义电机模型:根据电机的参数和特性,定义一个数学模型来表示电机的动态响应,例如通过电机的转矩-转速曲线或电机的方程。
2.设计速度控制器:根据系统要求和电机模型,设计一个适当的速度控制器。
可以使用PID控制器或其他控制算法。
3.设计PWM调制器:根据速度控制器输出的控制信号,设计一个PWM调制器来生成PWM信号。
根据电机模型和控制要求,选择合适的PWM调制算法。
4.设计电流控制器:根据PWM信号和电机模型,设计一个电流控制器。
可以使用PID控制器或其他控制算法。
5. 仿真验证:将以上设计参数输入到MATLAB仿真模型中,并进行仿真验证。
可以使用Simulink工具箱来搭建仿真模型,并通过逐步增加负载或改变速度设定值等方式来验证系统的性能。
采用电流滞环调节器的电压矢量控制PWM整流器系统
4
电流滞环控制
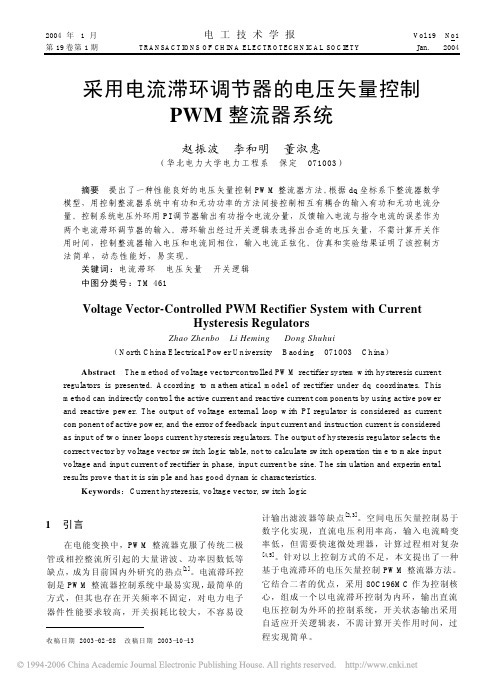
用霍尔元件检测 PWM 整流器的三相输入电流
图1 Fig.1
电 压 型 PWM 整 流 器 电 流 滞 环 矢 量 控 制 原 理 Principle of voltage vector-controlled PWM rectifier with current hysteresis
i a、ib、ic ,通过矢量变换矩阵得到两个直流分量 i d、 i q,表示为 2π 2 π i a cos ω t cos( ω t − ) cos( ω t + ) i d 2 3 3 i = 3 sin ω t sin(ω t − 2π ) sin(ω t + 2π ) b i q 3 3 i c (6) 反 馈 输 出 直 流 电 压 u dc 和 给 定 输 出 直 流 电 压
(2)
由于电网电压是标准的正弦波且三相对称,因 此 u q = 0 。电网电压 q 轴分量为零,只有 d 轴分量
u d ,其模长等于电网相电压的幅值。因此,式 (2) 简化为 p = u d id , q = ud iq (3)
从式 (3)得到 PWM 整流器系统有功功率 p 和无 功功率 q 表示的输入电流分量 i d 和 iq 之间是解耦的, 功率和电流之间成比例关系。因此,根据系统有功 功率 p 和无功功率 q 的控制方法来间接控制输入电 流两个分量 id 和 iq。根据图 2,输入电流 i 的两个分 量 i d 和 i q 表示如下 id = usq us sin δ u u −u cosδ = , i q = sd = d s X X X X (4)
图2 Fig.2
整流器各矢量间的关系 Relation of rectifier vectors
双闭环可逆直流脉宽PWM调速系统设计
双闭环可逆直流脉宽PWM调速系统设计一、系统结构设计:系统结构包括输入电源、PWM逆变器、直流电机、电流环和速度环。
输入电源提供电压给PWM逆变器,PWM逆变器将直流电压转换为交流电压,并通过变换器将其提供给直流电机。
同时,电流环用于控制PWM逆变器输出的电流,速度环用于控制直流电机的转速。
二、电流环控制器设计:电流环控制器根据直流电机当前的速度误差,计算所需的电流控制量。
该控制量将通过PWM逆变器的调制信号控制输出电流的大小。
电流环控制器可以采用PI控制器或者其他控制算法,根据系统要求进行选择。
三、速度环控制器设计:速度环控制器根据输入的期望转速和直流电机当前的转速误差,计算所需的电流控制量。
该控制量将通过电流环控制器的反馈信号,控制电流环控制器的输出。
速度环控制器可以采用PI控制器或者其他控制算法,根据系统的要求进行选择。
四、参数调节与优化:在系统设计完成后,需要进行参数调节和优化来使系统达到更好的性能。
参数调节可以通过试验来进行,根据试验的结果来逐步调整控制器的参数,以达到期望的控制效果。
参数优化可以通过优化算法来进行,根据系统的动态特性和性能指标进行参数优化,以提高系统的控制性能。
双闭环可逆直流脉宽PWM调速系统的设计需要考虑系统的控制精度、动态响应速度和稳定性等因素。
在实际的设计过程中,还需要考虑系统的成本和可行性等因素。
在设计完成后,还需要进行系统的实验验证,以确定系统是否满足设计要求,并进行必要的修改和改进。
总之,双闭环可逆直流脉宽PWM调速系统的设计是一个复杂的过程,需要综合考虑系统的各个方面因素,并进行系统的参数调节和优化。
只有设计合理、参数优化的系统才能提高直流电机的控制性能和精度。
基于PWM控制的直流双闭环调速系统设计

基于PWM控制的直流双闭环调速系统设计摘要:调速方案的优劣直接关系到系统调速的质量,根据电机的型号及参数选择最优方案,以确保系统能够正常,稳定地运行。
文章中研究的系统采用直流双闭环调速系统,使系统达到稳态无静差,调速范围0~1 500 r/min,电流过载倍数为1.5倍,速度控制精度为0.1%(额定转速时)。
关键词:直流调速;PWM ;双闭环;PI调节PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在20世纪80年代以前一直未能实现。
直到进入20世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用。
文章主要研究了利用MCS-51系列单片机,通过PWM方式控制直流电机调速的方法。
1系统总体设计①系统控制对象的确定。
本次设计选用直流电动机的额定参数直流电动机的额定参数PN=15kW、UN=440V、IN=39.3A、nN=1 510 r/min,电流过载倍数λ=1.5。
电枢回路总电阻为R=Ra+Rrec=0.806 Ω,系统机电时间常数Tm=0.76 s,电磁时间常数Tl=0.0167 s,电动势系数Ce=0.270 V*min/r。
②电动机供电方案选择。
变电压调速是直流调速系统用的主要方法,可控制电源通常有3种:其一,旋转变流机组简称G-M系统;其二,用静止的可控整流器称V-M;其三,PWM系统,与前两种相比,PWM系统在很多方面有较大的优越性:主电路线路简单,需要的功率器件少;开端频率高,电流容易连续,谐波少,电机损耗及发热都较小:低速性能好,稳速精度该,调速范围宽,可达1∶10 000左右;若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强;功率开关器件工作在开关状态,道通损耗小,当开关频率适当时,开关损耗也不大,因而装置效率高;直流电源采用不控整流时,电网功率因数比相控整流高。
本设计应脉宽调速要求,采用直流PWM调速系统。
③晶体管PWM功率放大器方案选择。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2卷第4期1998年12月电 机 与 控 制 学 报EL ECTRIC MACHIN ES AND CON TROLVol.2 No.4Dec. 1998采用双直流电流滞环调节器的矢量控制PWM 变频调速系统3V ector -controlled PWM VVVF System with Tw o DCH ysteresis Current R egulators崔纳新 张庆范 王 军(山东工业大学)Cui N axin Zhang Q ingfan W ang Jun(Shandong University of Technology )摘 要 矢量控制变频调速系统因其诸多的优良特性,具有广阔的发展和应用前景。
本文提出一种性能良好的交流电机矢量控制PWM 调整方案,采用两个电流滞环调节器,滞环调节器的输出通过EPR OM 电压矢量开关表选择合适的电压矢量输出,控制逆变器。
运行结果表明,该系统具有良好的稳态和动态性能。
关键词 变频调速;矢量控制;电流滞环调节器分类号 TM34312Abstract The vector -controlled VVV F system is widely used for industrial applications for its ap 2pealing characteristics.In this paper ,a new vector -controlled PWM system with two hysteresis cur 2rent regulators is presented.The outputs of current regulators choose suitable voltage -vectors through EPR OM voltage -vector switching -table.The operation results show the system has excellent static and dynamic performances.K eyw ords frequency converter ;vector control ;hysteresis current regulator收稿日期:1998-06-013山东省经委资助课题(9110124027)。
获山东省科技进步二等奖。
崔纳新 女 1968年生,讲师,1994年山东工业大学硕士研究生毕业,主要从事电力电了与电气传动、计算机控制技术方面的数学与研究。
1 引 言目前,先进的PWM 变频调速系统都是以矢量控制理论为基础。
随着现代控制理论、微电子技术和现代电力电子技术的迅速发展,人们将微处理器技术同现代电力电子技术结合起来实现交流异步电机的矢量控制,极大地提高了系统的控制精度和动态性能,并简化了系统结构[1]。
本文以双80C196单片机为控制核心,组成一个以电流控制为内环,转速控制为外环,以高速电力电子器件IG B T 功率模块为逆变器开关元件的全数字化矢量控制变频调速系统。
在交流传动系统中,电流滞环跟踪控制得到了越来越广泛的应用。
在矢量控制中,按转子磁场定向的电流指令值i 3D ,i 3Q 经坐标变换转换为三相交流电流指令i 3A ,i 3B ,i 3C 。
因此,电流控制环由三个调节交流分量的独立调节器组成,对定子三相交流电流分别进行调节。
电流滞环跟踪控制的电流输出波形好,且动态响应快,鲁棒性强,又能限流,在矢量控制中不失为一种简单有效的方法。
其主要缺点是,它的谐波产生是随机的,线电压的基波成分相对降低,逆变器的电压利用率低。
针对这一不足,本文采用一种新型电流滞环控制策略,直接对按转子磁场方向定向的定子电子流的转矩分量和励磁分量进和调节。
因此,系统的结构和控制相对简化。
2 系统的数学模型所依据的数学模型是按转子磁链Ψr 定向的异步电动机电压方程。
考虑到鼠笼型异步电动机转子短路,数学模型中的电压矩阵方程为uDu Q00t e=R s +L s P -ωs L s L m P -ωs Lm ωs L sR s +Ls Pωs L mL m P L m P0R r L +L r Pωf L m 0ωf L fR rA i D i Q i d i q d u(1)DQ 坐标沿转子磁场定向,D 轴与转子磁链Ψr方向一致,满足Ψq =0的约束条件。
在此条件下,满足磁场定向的磁链方程为ΨD =L s i D +L m i d (2)ΨQ =L s i Q +L m i q (3)Ψd =L m i D +L r i d (4)0=L m i Q +L r iq(5)转子磁通的瞬时相位θ1由ωs 积分得到θ1=∫ωs dt =∫(ωr+ωf)d t(6)3 控制系统结构根据以上数学模型,设计出转差频率型矢量控制系统,结构框图如图1所示。
图1 矢量控制系统结构框图 转差频率型矢量控制与磁通反馈型矢量控制的不同之处在于,它不是根据检测得到的定子电流、电压信号经过数学模型运算求得转子磁链Ψr ,及转子磁链的瞬时相位角θ1,而是根据定子电流转矩分量给定i 3Q 、转子磁链给定Ψ3r 以及电动机参数,通过磁场定向模型求得θ1。
转子磁链不形成闭环,而是采用前馈方式。
转差频率型矢量控制系统结构简单,动态性能优良。
由于不采用转子磁链反馈,所以不存在反馈信号失真的问题。
在交流传动系统中,最关键的问题是实现交流电动机瞬时转矩的高性能控制。
在矢量控制系统中,由系统的数学模型可得Ψr =L mT 2P +1iD(7)T e =n pL mL r Ψr i Q(8)由以上两式可以看出,电磁转矩的控制最终取决于对转矩电流分量i Q 和励磁电流分量i D 的控制。
在恒磁通调速范围内,应尽量保持转子磁通Ψr 不变,通过调节i Q 来直接控制系统的电磁转矩。
4 电流控制策略首先,将由霍尔元件检测到的定子三相交流电流,通过知量变换式(9)转变为按转子磁通Ψr 定向的两个直流分量i D 、i Qi D i Q=23cosθ1sin θ1-sin θ1cos θ1P C1 -12 -120 32 -32数可i A i B i C (9)然后,,将电流分量i D 、i Q 与其指令值比较,定义偏差为δi D =i 3D -i D (10)δi Q =i 3Q -i Q(11) 电流调节器设计为两个三位滞环比较器,H D 和H Q 分别为两个比较器的滞环宽度,其中D 轴电流调节器HCD 的输入输出特性示于图2。
定义如下:当δi D ≥H D 时,d D =1;当|δi D |<H D 时,若d D =1;且δi D >0,则d D =1;若d D =-1,且δi D <0,则d D =-1;否则,d D =0;当δi D <-H D 时,d D =-1。
同理,可定义Q 轴电流调节器HCQ 。
这里,H D 和H Q 都是可调的。
通过分别选择H D 和H Q ,就能够对转矩电流和励磁电流的谐波含412电 机 与 控 制 学 报 第2卷量分别进行调节,从而有效地降低谐波分量,减小电动机损耗和噪声,提高动态性能。
图2 D 轴电流调节器HCD 的输入输出特性5 电压矢量选择和开关控制表对于三相桥式逆变器,若用0,1表征逆变器开关状态(0表示逆变器下臂导通,1表示逆变器上臂导通),则共有8种开关状态S 0~S 7:S 0=000,S 1=001,S 2=010,…,S 7=111。
设逆变器输出端电位为V A ~V C ,负载电动机绕组中性点为V n ,则电压矢量 V P 可表示为V P =(V A -V n )+α2(V B -V n )+α(V C +V n )=V A +α2V B +αV C(12)其中α=e j2π/3。
当逆变器开关状态确定后, V P 便被唯一确定,则8种状态下的电压矢量见图3。
其中V 0和V 7分别表示正、反组三个IG B T 全部关断,均为零电压矢量。
图3 电压矢量图 由文献[3]知,有以下关系u Q - u Q ≌σL s Pi Q(13)u D ≌σL s Pi D(14)其中 u Q 为周期内各开关状态的平均值。
由上式可知,当u Q > u Q 时,i Q 增加;反之,i Q 减小。
而i D 的增减与u D 的极性相同。
设逆变器直流侧负极电位为零,则D -Q 轴系电压与逆变器输出电位V A ~V C 的关系为u Q uD+=23c osθ1cos (θ1-2π/3)c os (θ1+2π/3)s in θ1s in (θ1-2π/3)s in(θ1+2π/3)r,及V A V B V C i 3(15)考虑电压矢量与开关状态的对应关系,由式(15)可给出电压矢量与U D /U d 及U Q /U d 的对应关系(U d 为逆变器直流侧电压),如图4所示。
图4 电压矢量与U D /U d 及U Q /U d 的对应关系(a )电压矢量与U D /U d 的对应关系(b )电压矢量与U Q /U d 的对应关系 为精确选择合适的电压矢量,可将图3的平面分成12个扇面如图5所示。
图5 分成12个扇面的定子电压矢量平面以0<θ1<π/6为例,此时D 轴位于扇面1:①若d D =1,d Q =1,这意味着δi D ,δi Q 均为正,且在滞环之外,此时应首先考虑i D 的增大,并兼顾i Q 增值的要求。
根据图4和式(15)分析,应选择V 4。
②若d D =1,d Q =0,此时应选择使i D 增大,同512第2期采用双直流电流滞环调节器的矢量控制PWM 变频调速系统 时i Q 基本不变的电压矢量,由图4和式(15)分析,应选择V 5。
③d D =1,d Q =-1,这意味着δi D 为正,δi Q 为负,且都在滞环之外,应首先考虑i D 增大,并兼顾i Q 减小的要求。
应选择V 1。
④d D =0,d Q =1,应选择电压矢量使i Q 增大,同时i Q 基本保持不变。
经分析,应选择V 4。
⑤d D =0,d Q =0,选择零电压矢量V 0。
⑥d D =0,d Q =-1,应选择电压矢量使i Q 减小,同时i D 基本保持不变。
经分析。
应选择V 3。
⑦d D =-1,d Q =1,应选择电压矢量使i D 减小,并兼顾i Q 增值的要求,V 6符合要求。
⑧d D =-1,d Q =0,选择V 2,因为它的D 轴分量为负,而Q 轴分量较小。
⑨d D =-1,d Q =-1,选V 3。
对于其他扇面可比照上述过程选择合适的电压矢量。
最后将所得结果存于EPROM 中,形成电压矢量开关表。
根据d D ,d Q 和θ1查询EPROM 开关表得电压矢量,直接输出PWM 信号控制逆变器。