最小二乘曲线拟合与参数辨识
聚合物锂电池P2D模型的参数辨识方法
设计应用聚合物锂电池P2D模型的参数辨识方法肖席,王建立,阮喻(陆军工程大学通信士官学校,重庆模型的过程参数,在常温25 ℃下设计不同工况进行实验,内阻测试仪测量辨小倍率放电实验辨识电极固相扩散过程相关参数,激励电流实验辨识反应极化和液相扩散过程参数。
经最小二乘拟合相关参数,证明辨识方法可行。
聚合物锂电池;参数辨识;固相扩散Parameter Identification Method for P2D Model of Polymer Lithium BatteryXIAO Xi,WANG Jianli,RUAN YuArmy Engineering University of PLAIn order to identify the parameters of P2D model process of polymer lithium batteryconditions were designed for experiments at normal temperature 25℃,02C small rate dischargediffusion process of the electrode放电充电负极晶体结构正极晶体结构锂离子隔膜锂离子小倍率放电时,近似认为测得的端电压为理想(2)分别为正由于电流较小,忽略极化影响,近似认为:(3)式中,y surf y 0,x 0,为荷电状态。
2.2.2 小倍率放电实验设计在小倍率此时可忽略极化过电势,将式((2)进行求解。
小电流放电测试结果如图测试曲线时间/min500100015002000250030002 400.02 200.02 000.01 800.01 600.01 400.01 200.01 000.0800.0600.0400.0200.00.0电流/mA 容量/mAh图2 0.02 C 放电电压-容量曲线图U p ( y surf )和U n (x surf )对某一特定电极来说是已知的函数,据此可推导E ovc 和(x 0, y 0, 关系,与实测理想电势变化曲线对比并利(x 0, y 0, D 1, D 2, soc )[3]。
最小二乘参数辨识的matlab仿真程序注释与剖析
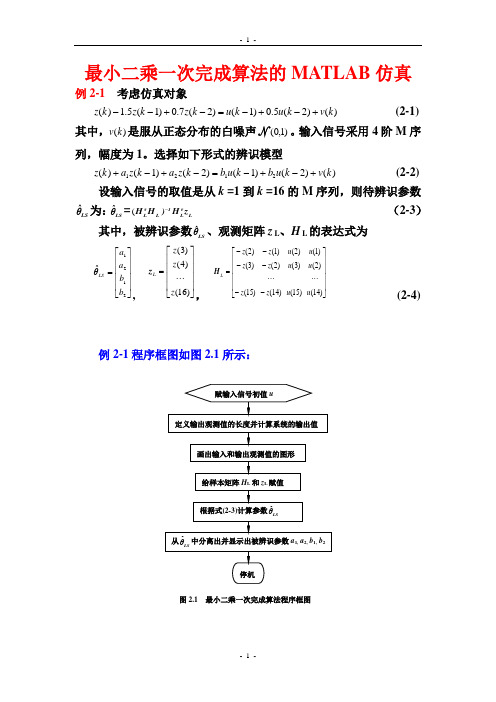
最小二乘一次完成算法的MATLAB 仿真 例2-1 考虑仿真对象)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z +-+-=-+-- (2-1)其中,)(k v 是服从正态分布的白噪声N )1,0(。
输入信号采用4阶M 序列,幅度为1。
选择如下形式的辨识模型)()2()1()2()1()(2121k v k u b k u b k z a k z a k z +-+-=-+-+ (2-2)设输入信号的取值是从k =1到k =16的M 序列,则待辨识参数LS θˆ为:LSθˆ=L τL 1L τL z H )H H -( (2-3)其中,被辨识参数LSθˆ、观测矩阵z L 、H L 的表达式为 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=2121ˆb b a a LSθ,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)16()4()3(z z z L z ,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=)14()2()1()15()3()2()14()2()1()15()3()2(u u u u u u z z z z z z L H(2-4)例2-1程序框图如图2.1所示:例2-1Matlab仿真程序如下:%二阶系统的最小二乘一次完成算法辨识程序,文件名:FLch3LSeg1.mu=[-1,1,-1,1,1,1,1,-1,-1,-1,1,-1,-1,1,1]; %系统辨识的输入信号为一个周期的M序列z=zeros(1,16); %定义输出观测值的长度for k=3:16z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2); %用理想输出值作为观测值endsubplot(3,1,1) %画三行一列图形窗口中的第一个图形stem(u) %画输入信号u的径线图形subplot(3,1,2) %画三行一列图形窗口中的第二个图形i=1:1:16; %横坐标范围是1到16,步长为1plot(i,z) %图形的横坐标是采样时刻i, 纵坐标是输出观测值z, 图形格式为连续曲线subplot(3,1,3) %画三行一列图形窗口中的第三个图形stem(z),grid on %画出输出观测值z的径线图形,并显示坐标网格u,z %显示输入信号和输出观测信号%L=14 %数据长度HL=[-z(2) -z(1) u(2) u(1);-z(3) -z(2) u(3) u(2);-z(4) -z(3) u(4) u(3);-z(5) -z(4) u(5) u(4);-z(6) -z(5) u(6) u(5);-z(7) -z(6) u(7) u(6);-z(8) -z(7) u(8) u(7);-z(9) -z(8) u(9)u(8);-z(10) -z(9) u(10) u(9);-z(11) -z(10) u(11) u(10);-z(12) -z(11) u(12) u(11);-z(13) -z(12) u(13) u(12);-z(14) -z(13) u(14) u(13);-z(15) -z(14) u(15) u(14)] %给样本矩阵H L赋值ZL=[z(3);z(4);z(5);z(6);z(7);z(8);z(9);z(10);z(11);z(12);z(13);z(14);z(15);z(16)] % 给样本矩阵z L赋值%Calculating Parametersc1=HL'*HL; c2=inv(c1); c3=HL'*ZL; c=c2*c3 %计算并显示θˆLS%Display Parametersa1=c(1), a2=c(2), b1=c(3),b2=c(4) %从θˆ中分离出并显示a1、a2、b1、b2LS%End例2-1程序运行结果:u =[ -1,1,-1,1,1,1,1,-1,-1,-1,1,-1,-1,1,1]z =[ 0,0,0.5000,0.2500,0.5250,2.1125, 4.3012,6.4731,6.1988,3.2670,-0.9386, -3.1949,-4.6352,6.2165,-5.5800,-2.5185] HL =1.0000-1.0000-0.5000 0 -1.0000 1.0000 -0.2500 -0.5000 1.0000-1.0000-0.5250 -0.2500 1.0000 1.0000 -2.1125 -0.5250 1.0000 1.0000 -4.3012 -2.1125 1.0000 1.0000 -6.4731-4.3012 -1.0000 1.0000-6.1988-6.4731 -1.0000 -1.0000-3.2670-6.1988 -1.0000 -1.00000.9386-3.2670 1.0000 -1.00003.19490.9386 -1.0000 1.00004.63523.1949 -1.0000 -1.00006.21654.6352 1.0000 -1.00005.58006.2165 1.0000 1.0000(14*4)ZL =[ 0.5000,0.2500,0.5250,2.1125,4.3012,6.4731,6.1988,3.2670,-0.9386,-3.1949, -4.6352,-6.2165,-5.5800,-2.5185]T (14*1)c =[ -1.5000,0.7000,1.0000,0.5000]Ta1 = -1.5000 a2 = 0.7000 b1 = 1.0000 b2 =0.5000-101-10010-10010对比:)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z +-+-=-+-- (2-1) 可以看出,由于所用的输出观测值没有任何噪声成分,所以辨识结果无任何误差。
模态参数识别的单模态法,模态参数识别的导纳圆法

一.模态参数识别的单模态法常见的单模态识别有三种方法:直接读数法(分量分析法)、最小二乘圆拟合法和差分法。
所谓单模态识别法,是指一次只识别一阶模态的模态参数,所用数据为该阶模态共振频率附近的频响函数值。
待识别的这阶模态称为主导模态,余模态称为剩余模态,剩余模态的影响可以全部忽略或简化处理。
1. 直接读数法(分量分析法) 1)基本公式所谓分量分析法就是讲频响函数分成实部分量和虚部分量来进行分析。
N 自由度结构系统结构,p 点激励l 点响应的实模态频响函数可表示如下:2222222111()(1)(1)Nr rlp r err r r r g H j K g g ωωωω=⎡⎤--=+⎢⎥-+-+⎣⎦∑(1.1) 其中rer lr prK K φφ=,为第二阶等效刚度/r r ωωω=g 2r r rζω= ,为第r 阶模态结构阻尼比当ω趋近于某阶模态的固有频率时,该模态起主导作用,称为主导模态或者主模态。
在主模态附近,其他模态影响较小。
若模态密度不是很大,各阶模态比较远离,其余模态的频响函数值在该模态附近很小,且曲线比较平坦,即几乎不随频率而变化,因此其余模态的影响可以用一个复常数来表示,第r 阶模态附近可用剩余模态表示成: 222222211()()(1)(1)R Ir r lp C C err r r r g H j H H K g g ωωωω⎡⎤-=-++⎢⎥-+-+⎣⎦(1.2) ()lp H ω的实部和虚部可分别表示如下: 222211()(1)R Rr lpC err r H H K g ωωω⎡⎤-=+⎢⎥-+⎣⎦ (1.3) 2221()(1)I Ir lp C err r g H H K g ωω⎡⎤-=+⎢⎥-+⎣⎦(1.4)R CH 和I C H 分别是剩余模态的实部和虚部。
2)实频图和虚频图由于剩余模态与ω无关,故其相当于是在实频图和虚频图上上下平移一段距离。
此平行线又称为剩余柔度线。
实验6数据拟合及参数辨识方法(精)

实验6 数据拟合及参数辨识方法一、实验目的及意义[1] 了解最小二乘拟合的基本原理和方法;[2] 掌握用MATLAB作最小二乘多项式拟合和曲线拟合的方法;[3] 通过实例学习如何用拟合方法解决实际问题,注意与插值方法的区别。
[4] 了解各种参数辨识的原理和方法;[5] 通过范例展现由机理分析确定模型结构,拟合方法辨识参数,误差分析等求解实际问题的过程;通过该实验的学习,掌握几种基本的参数辨识方法,了解拟合的几种典型应用,观察不同方法得出的模型的准确程度,学习参数的误差分析,进一步了解数学建模过程。
这对于学生深入理解数学概念,掌握数学的思维方法,熟悉处理大量的工程计算问题的方法具有十分重要的意义。
二、实验内容1.用MATLAB中的函数作一元函数的多项式拟合与曲线拟合,作出误差图;2.用MATLAB中的函数作二元函数的最小二乘拟合,作出误差图;3.针对预测和确定参数的实际问题,建立数学模型,并求解。
三、实验步骤1.开启软件平台——MATLAB,开启MATLAB编辑窗口;2.根据各种数值解法步骤编写M文件3.保存文件并运行;4.观察运行结果(数值或图形);5.根据观察到的结果写出实验报告,并浅谈学习心得体会。
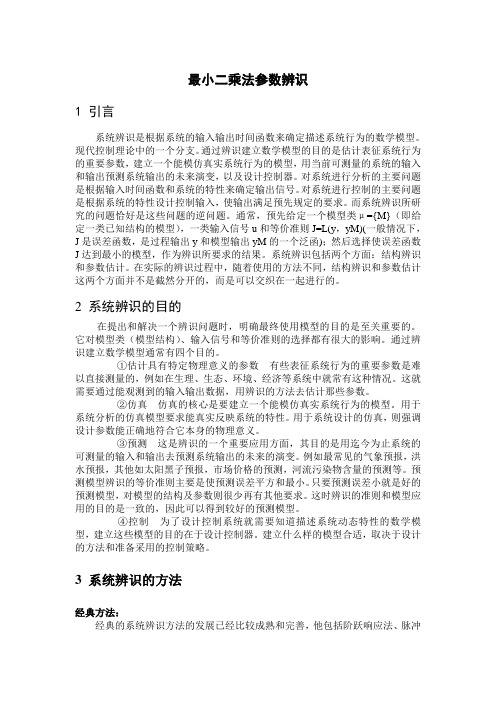
四、实验要求与任务根据实验内容和步骤,完成以下具体实验,要求写出实验报告(实验目的→问题→数学模型→算法与编程→计算结果→分析、检验和结论→心得体会)应用实验1.旧车价格预测某年美国旧车价格的调查资料如下表,其中x i表示轿车的使用年数,y i表示相应的平均价格。
试分析用什么形式的曲线来拟合上述的数据,并预测使用4.5年后轿车的平均价格大致为多少?由题意知用matlab编程:t=1:1:10;r=[2615 1943 1494 1087 765 538 484 290 226 204];aa=polyfit(t,r,2);a=aa(1)b=aa(2)c=aa(3)y=polyval(aa,t);plot(t,r,'k+',t,y,'r')z=a*4.5*4.5+b*4.5+c图像如下:z = 955.7047从而可知第4.5年的预测结果为956辆2.机器人识别定形工具柄问题机器人在不同层次上应用于工业生产、水下探测、核点开发、军事研究等领域和部门。
系统辨识—最小二乘法
最小二乘法参数辨识1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。
③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
预测模型辨识的等价准则主要是使预测误差平方和最小。
基于最小二乘法的系统参数辨识
基于最小二乘法的系统参数辨识吴令红,熊晓燕,张涛太原理工大学机械电子研究所,太原 (030024)E-mail lhwu0818@摘要:系统辨识是自动控制学科的一个重要分支,由于其特殊作用,已经广泛应用于各种领域,尤其是复杂系统或参数不容易确定的系统的建模。
过去,系统辨识主要用于线性系统的建模,经过多年的研究,已经形成成熟的理论。
但随着社会、科学的发展,非线性系统越来越受到人们的关注,其控制与模型之间的矛盾越来越明显,因而非线性系统的辨识问题也越来越受到重视,其辨识理论不断发展和完善本。
文重点介绍了系统参数辨识中最小二乘法的基本原理,并通过悬臂梁模型的辨识实例,具体说明了基于最小二乘法参数辨识在Matlab 中的实现方法。
结果表明基于最小二乘法具有算法简单、精度较高等优点。
关键词:系统辨识;参数辨识;滑动平均模型(ARX);最小二乘法;Matlab中图分类号:TH-91. 引言所谓辨识就是通过测取研究对象在人为输入作用下的输出响应,或正常运行时的输入输出数据记录,加以必要的数据处理和数学计算,估计出对象的数学模型。
这是因为对象的动态特性被认为必然表现在它的变化着的输入输出数据之中,辨识只不过是利用数学的方法从数据序列中提炼出对象的数学模型而已[1]。
最小二乘法是系统参数辨识中最基本最常用的方法。
最小二乘法因其算法简单、理论成熟和通用性强而广泛应用于系统参数辨识中。
本文基于悬臂梁的实测数据,介绍了最小二乘法的参数辨识在Matlab中的实现。
2. 系统辨识一般而言,建立系统的数学模型有两种方法:激励分析法和系统辨识法。
前者是按照系统所遵循的物化(或社会、经济等)规律分析推导出模型。
后者则是从实际系统运行和实验数据处理获得模型。
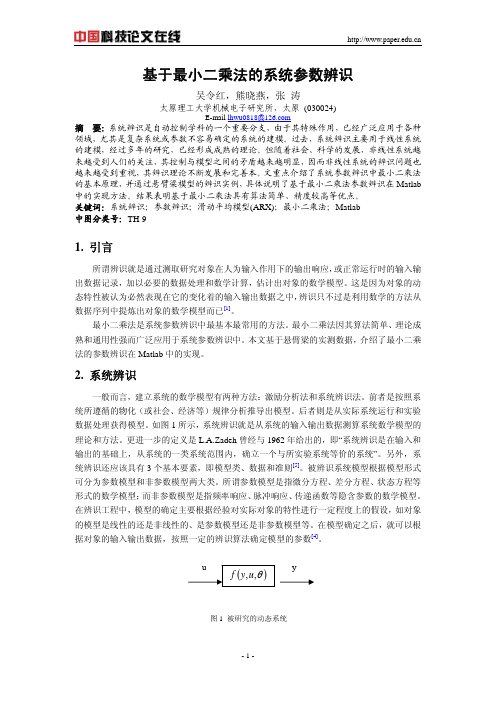
如图1所示,系统辨识就是从系统的输入输出数据测算系统数学模型的理论和方法。
更进一步的定义是L.A.Zadeh曾经与1962年给出的,即“系统辨识是在输入和输出的基础上,从系统的一类系统范围内,确立一个与所实验系统等价的系统”。
滤波器的系统建模和参数辨识方法

滤波器的系统建模和参数辨识方法滤波器是一种常用的信号处理器件,它能够将输入信号中的某些频率分量滤除或增强,对信号进行频域的调节。
在实际应用中,对滤波器进行系统建模和参数辨识可以帮助我们更好地理解其工作原理,并可以针对具体需求进行设计和改进。
本文将介绍滤波器的系统建模和参数辨识方法。
一、系统建模方法1. 传递函数建模法传递函数建模法是最常用的滤波器系统建模方法之一。
通过分析输入和输出之间的关系,可以将滤波器抽象为一个传递函数,描述输入信号到输出信号的传递过程。
传递函数通常由多个系数构成,不同的滤波器类型有不同的传递函数形式。
以二阶低通滤波器为例,其传递函数形式为:H(s) = K / (s^2 + 2ζωns + ωn^2)其中,K是增益系数,ζ是阻尼比,ωn是自然角频率。
通过测量输入输出信号的频率响应和阶跃响应等,可以确定传递函数的系数,从而实现滤波器的系统建模。
2. 差分方程建模法差分方程建模法是一种常用的离散时间滤波器建模方法。
通过分析单位脉冲响应和差分方程之间的关系,可以将滤波器表示为一个递归方程。
递归方程将当前时刻的输出和过去时刻的输入和输出联系起来,描述了滤波器的动态特性。
以一阶差分方程为例,其递归方程形式为:y(n) = b0 * x(n) + b1 * x(n - 1) - a1 * y(n - 1)其中,y(n)是当前时刻的输出,x(n)是当前时刻的输入,b0、b1和a1是系数。
通过测量输入输出信号的离散时间响应,可以确定差分方程的系数,从而实现滤波器的系统建模。
二、参数辨识方法参数辨识是指根据已知的输入输出数据,推导出滤波器的参数值的过程。
对于已知结构的滤波器,参数辨识可以帮助我们确定其具体的参数取值,从而实现滤波器的精确设计和性能优化。
1. 最小二乘法最小二乘法是一种常用的参数辨识方法,通过最小化预测误差的均方差,来确定滤波器的参数值。
最小二乘法可以应用于各种滤波器类型,包括线性滤波器和非线性滤波器。
最小二乘曲线拟合

最小二乘曲线拟合
最小二乘曲线拟合是一种经典的机器学习方法,用于拟合数据集
中的函数,进而可以求解或预测模型中的参数。
它是将数据点投影到
将曲线拟合的最佳模型的过程,其目标是使误差的平方和最小化。
换
句话说,它将最小二乘函数当作损失函数,试图“最小化”拟合曲线
的“误差”,并利用梯度下降的算法自动求解模型参数。
最小二乘曲线拟合是一种理想的函数估计方法,有时候不可避免
会有噪声出现在数据中,而有了噪声,实际估计出来的参数可能不是
最佳的,所以有时会对模型参数进行正则化。
正则化会将噪声过滤掉,使估计的模型参数更加有效。
最小二乘曲线拟合有着广泛的应用领域,尤其是统计学和机器学习,最小二乘法可以用于拟合大量不同类型的函数,因此在多元回归
分析中被广泛使用。
它也可以用于估计曲线方程的系数和参数,从而
实现对数据的拟合。
总之,最小二乘曲线拟合是一种常用的数据拟合方法,能够处理
流行和复杂的函数形式,正确估计模型参数,并能够抑制噪声的干扰。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.1 利用最小二乘法求模型参数
例:表 1 中是在不同温度下测量同一热敏电阻的阻值,根 据测量值确定该电阻的数学模型, 并求出当温度在 70 C 时
的电阻值。
表 1 热敏电阻的测量值
t (C ) R ()
20.5 765
26 790
32.7 826
40 850
51 873
61 910
73 942
i 1 i 1 n n
如果定义
h(k ) [ y(k 1), y(k 2),, y(k n),u(k 1),u(k 2),, u(k n)]
[a1 , a2 ,, an , b1 , b2 ,, bn ]
T
z (k ) h(k ) v(k )
80 980
88 1010
95.7 1032
表 1 热敏电阻的测量值
t (C ) R ()
20.5 765
26 790
32.7 826
40 850
51 873
61 910
73 942
80 980
88 1010
95.7 1032
R a bt
N ˆ N N 2 N a Ri t R 702 i.762 i t i t i i 1 i 1 a i 1 i 1 ˆ 2 N N ˆ N t i2 t i b 3.4344 i 1 i 1 N N N N Ri t i Ri t i i 1 i 1 b i 1 ˆ R 943 .1682 N N 2 N ti ti i 1 i 1
1 1
5r r 4
2.3 加权最小二乘法原理及算法
一般最小二乘估计精度不高的原因之一是对测量数据同等对待 各次测量数据很难在相同的条件下获得的 有的测量值置信度高,有的测量值置信度低的问题 对不同置信度的测量值采用加权的办法分别对待
置信度高的,权重取得大些;置信度低的,权重取的小些
ˆ) (Z H )T W (Z H ) min ˆ ˆ J ( m m m m m
J
T ˆ 2H mWm ( Z m H m ) 0
ˆ
ˆ (H T W H ) 1 H T W Z m m m m m m
2.3 加权最小二乘法原理及算法
T T T T E( ) (Hm Hm )1 Hm E(VmVm )Hm (Hm Hm )1
~ ~T
( H Hm ) H RHm ( H Hm )
T m T m T m
1
1
2.2 一般最小二乘法原理及算法
例 3.2 用 2 台仪器对未知标量 各直接测量一次,量 测量分别为 z 1 和 z 2 ,仪器的测量误差均值为 0,方差分别 为 r 和 4 r 的随机量,求 的最小二乘估计,并计算估计的 均方误差。
N N
N N N N Ri t i2 Ri t i t i i 1 i 1 i 1 a i 1 ˆ 2 N N 2 N ti ti i 1 i 1 N N N N Ri t i Ri t i i 1 i 1 b i 1 ˆ 2 N N 2 N ti ti i 1 i 1
t 70 C
2.2 一般最小二乘法原理及算法
v(k ) u (k ) G (z ) y (k ) z (k )
图 3.4 SISO 系统的“黑箱”结构
b1 z 1 b2 z 2 bn z n y (k ) G( z ) u(k ) 1 a1 z 1 a2 z 2 an z n
y(k ) ai y (k i) bi u (k i)
i 1 i 1
ቤተ መጻሕፍቲ ባይዱ
n
n
2.2 一般最小二乘法原理及算法
v(k ) u (k ) G (z ) y (k ) z (k )
图 3.4 SISO 系统的“黑箱”结构
若考虑被辨识系统或观测信息中含有噪声
z (k ) ai y(k i) bi u (k i) v(k )
N J 2 ( Ri a bti ) 0 a i 1 ˆ a a N J 2 ( Ri a bti )t i 0 b bbˆ i 1
ˆ ˆ Na b t i Ri i 1 i 1 N N N ˆ a t i b t i2 Ri t i ˆ i 1 i 1 i 1
ˆ) (Z H )T (Z H ) min ˆ ˆ J ( m m m m ˆ) (Z H )T W (Z H ) min ˆ ˆ J (
m m m m m
Wm diag[ w(1), w(2),, w(m)]
2.3 加权最小二乘法原理及算法
J min vi2 [ Ri (a bti )]2
i 1 i 1 N N
根据求极值的方法,对上式求导
N J 2 ( Ri a bti ) 0 a i 1 ˆ a a N J 2 ( Ri a bti )t i 0 b bbˆ i 1
1、引言
z
m次独立试验的数据
t (k )
G (z )
y (k )
(t1 , y1 ) (t2 , y2 )
(tm , ym )
f (t )
t
f (t ) a0 a1h1 (t ) a2 h2 (t ) an hn (t )
• 1801年初,天文学家皮亚齐发现了谷神星。 •1801年末,天文爱好者奥博斯,在高斯预 言的时间里,再次发现谷神星。 •1802年又成功地预测了智神星的轨道。
1
r 0 R 0 4r
ˆ 1 11 1 1 z1 1 ( z z ) 2 z 2 1 1 2
1 r 0 1 1 E ( ) 1 1 1 1 1 1 11 1 0 4r ~ ~T
解:由题意得量测方程
Z 2 H 2 V2
z1 Z2 z2
1 H2 1
r 0 R 0 4r
2.2 一般最小二乘法原理及算法
Z 2 H 2 V2
z1 Z2 z2
1 H2 1
当系统的量测噪声 Vm 是均值为 0,方差为 R 的随机向 量,则最小二乘估计有如下性质。
(1) 最小二乘估计是无偏估计,即
~ ˆ) 或 E( ) 0 E(
(2) 最小二乘估计的均方误差为
T T T E( ) (H m H m ) 1 H m RHm (H m H m ) 1
T T (H m H m ) 1 H m E(H m Z m )
T T (Hm Hm )1 Hm E(Vm ) 0
(2) 最小二乘估计的均方误差为
T T T E( ) (H m H m ) 1 H m RHm (H m H m ) 1
~ ~T
证明: 根据第(1)式的证明,显然有
i 1 i 1
n
n
z (k ) 为系统输出量的第 k 次观测值; y(k ) 为系统输出量的第 k 次真值; u (k ) 为系统的第 k 个输入值;
v(k ) 是均值为 0 的随机噪声。
2.2 一般最小二乘法原理及算法
z (k ) ai y(k i ) bi u (k i) v(k )
和最小,即
ˆ ˆ ˆ J ( ) (Z m H m )T (Z m H m ) min
J ˆ 2 H ( Z m H m ) 0
T m
ˆ
ˆ HTZ H H m m m
T m
2.2 一般最小二乘法原理及算法
T 如果 H m 的行数大于等于列数,即 m 2 n , H m H m 满秩,即 T T rank(H m H m ) 2n ,则 ( H m H m ) 1 存在。则 的最小二乘估计为
通过试验确定热敏电阻阻值和温度间的关系
t (C ) R ()
t1 R1
t2 R2
t N 1 RN 1
tN
RN
R a bt
• 当测量没有任何误差时,仅需2个测量值。 • 每次测量总是存在随机误差。
yi Ri vi 或 yi a bt vi
vi yi Ri或vi=yi a bti
ˆ (H T H ) 1 H T Z m m m m
最小二乘估计虽然不能满足式(3.12)中的每一个方程,使 每个方程都有偏差,但它使所有方程偏差的平方和达到最小,兼 顾了所有方程的近似程度,使整体误差达到最小,这对抑制测量 误差 v(i)(i 1,, m) 是有益的。
2.2 一般最小二乘法原理及算法
式中 为待估参数。
2.2 一般最小二乘法原理及算法
z (k ) h(k ) v(k )
令 k 1,2,, m ,则有
z (1) h(1) y(0) z (2) h(2) y(1) Hm Zm z ( m) h(m) y(m 1) y(1 n) u (0) y(2 n) u (1) y(m n) u (m 1) u (1 n) u ( 2 n) u ( m n)
T
a1 an b1 bn
T
Vm v(1) v(2) v(m)
Z m H m Vm
2.2 一般最小二乘法原理及算法