0526A-改FIT)
TR700说明书
tr700数字式重量变送器使用说明书longtec过程称重专家用前须知:初次使用前,请详细阅读本说明书,现场使用许多疑难问题,在本说明书中将找到答案。
使用前,请检查称重系统其他部件是否匹配。
使用本仪表,注意防晒、防雨水、防撞击。
使用本仪表,请尽可能配备常用安装、检修工具:小型一字螺丝刀,数字式万用表,称重传感器模拟器(mv信号发生器)。
目录1概述 .............................................................................................................................................................. .. (1)1-1简介............................................................................................................................................................... (1)2技术参数 .............................................................................................................................................................. (2)2-1一般参数 (2)2-2数字部分 (2)2-3模拟部分 (2)3安装与接线说明 (4)3-1安装注意事项 (4)3-2安装尺寸图 (4)3-3接线图及接线端子列表 (5)3-4称重终端最长可联接的称重信号电缆长度表 (6)3-5显示面板图 (7)3-6显示窗 .............................................................................................................................................................. (7)3-7状态指示光标 (7)3-8按键............................................................................................................................................................... (7)4基本操作图 .............................................................................................................................................................. .. 94-1tr700功能框架图 (9)4-2tr700操作流程 (10)4-3tr700功能树图 (11)5一般功能设置 (12)5-1功能设定步骤 (12)5-2功能设定列表 (13)6通讯参数设定及通讯协议 ...................................................................................................................................... 14 6-1rs232/rs485通讯 (14)6-1-1 串口1通讯参数设定 (15)6-1-2 串口1通讯参数列表 (16)6-1-3 串口1通讯协议 (16)6-1-3-1通讯协议1 (16)6-1-3-2 modbus通讯协议 (17)7仪表标定 .............................................................................................................................................................. .... 22 7-1 标定的意义 (22)7-2 标定操作 (23)7-2-1标定操作步骤 (23)7-2-1-1实物标定 (23)7-2-1-2数字标定 (25)7-2-1-3修改标定系数 (26)7-2-2-1 cal的总图 (27)7-2-2-2 实物标定参数列表 (27)7-2-2-3 数字标定参数列表 (27)7-2-3标定错误提示 (28)8诊断功能 .............................................................................................................................................................. . (29)8-1诊断功能操作步骤 (29)8-2诊断功能列表 (30)8-3诊断功能具体描述 (30)8-3-1毫伏值显示 (30)8-3-2按键测试 (30)8-3-3显示测试 (31)8-3-4通讯口测试 (31)8-3-5显示版本号 (31)8-3-6显示序列号 (31)8-3-7外部控制输入测试 (31)8-3-8继电器输出测试 (32)8-3-9参数恢复出厂设定 (32)9称重定值比较量设置 (33)9-1设置参数步骤 (33)9-2高低限参数设置列表 (35)10开关量输入/输出 (36)10-1外部控制输入 (36)10-1-2输入接口与外接开关的联接 (36)10-1-3输入接口与plc的联接 (36)10-2控制输出 (37)10-2-1输出说明 (37)10-2-2比较条件说明 ......................................................................................................................................... 37 10-3 模拟输出 (38)10-3-1 技术规格 (38)10-3-2输出实例 (38)11附图 .............................................................................................................................................................. . (39)11-1功能表 (39)11-1-1一般功能设定参数列表 (39)11-1-2 rs232/rs485通讯参数列表 (40)11-1-3 实物标定参数列表 (41)11-1-4 数字标定参数列表 (41)11-2标准ascii码一览表 (43)12记录 .............................................................................................................................................................. .......... 44 注:本公司保留对此产品进行修改和改进的权力,因此,技术上的改进,恕行通知。
和利时电机SYNTRON森创产品说明书

版权申明SYNTRON森创®是北京和利时电机公司(以下简称和利时电机)于2005年推出的产品品牌。
这个品牌浓缩了公司的核心技术和影响力,是公司始终注重自主创新,保持技术优势的体现。
说明书的内容参照了相关法律基准和行业基准。
如对本说明书提供的内容有疑问,请向销售人员咨询,致电客服热线,联系官网客服或致信本公司。
和利时电机保留在不事先通知的情况下,修改本手册中的产品和产品规格参数等权力。
手册请联系销售人员,或在和利时电机的官方网站下载相关手册。
和利时电机具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
和利时电机具有本使用说明书的著作权,未经许可,不得修改、复制使用说明书的全部或部分内容。
安全有关的符号说明本说明书中与安全有关的内容,使用了下述符号。
标注了安全符号的都为重要内容,请安全注意事项安全注意事项目录 第一章产品概况 ................................................... - 1 -1.1产品概况 ................................................................................................................................ - 1 -1.1.1简介 ........................................................................................................................... - 1 -1.1.2低压伺服驱动器型号命名 ....................................................................................... - 3 -1.1.3低压伺服一体机型号命名 ....................................................................................... - 3 -1.1.4规格和性能 ............................................................................................................... - 4 -1.1.5电机配套 ................................................................................................................... - 4 -1.1.6产品构造 ................................................................................................................... - 5 -1.1.7安装尺寸 ................................................................................................................... - 5 - 第二章准备 ...................................................... - 12 -2.1通讯协议及软件 .................................................................................................................. - 12 -2.2操作面板 .............................................................................................................................. - 13 -2.2.1操作面板介绍 .........................................................................................................- 13 -2.2.2指示灯介绍 .............................................................................................................- 13 -2.2.3数码管 .....................................................................................................................- 13 -2.2.4按键 .........................................................................................................................- 14 -2.2.5键盘操作流程 .........................................................................................................- 15 - 第三章配线 ...................................................... - 16 -3.1接线总图 .............................................................................................................................. - 16 -3.2接线定义 .............................................................................................................................. - 17 -3.2.1 LS-10520M2系列接线定义 ..................................................................................- 17 -3.2.2 LS-10530BA系列接线定义 ..................................................................................- 18 -3.2.3 LS-10530BK系列接线定义 ..................................................................................- 19 -3.2.4 LS-10530D5系列接线定义...................................................................................- 20 -3.2.5 LS-10540D/LS-10550D系列接线定义................................................................- 21 -3.2.6 LS-20530DG系列接线定义..................................................................................- 22 -3.2.7 LS-20520E系列接线定义 .....................................................................................- 23 -3.2.8 LS-20530E / LS-20535E系列接线定义..............................................................- 25 -3.2.9 LS-20540E系列接线定义 .....................................................................................- 27 -3.2.10 DM一体机系列接线(驱动器后置一体机).....................................................- 29 -3.2.11 SM一体机系列接线(驱动器侧背一体机) .....................................................- 29 -3.2.11.1类型1 ....................................................................................................................- 29 -3.2.11.2类型2 ....................................................................................................................- 32 -3.3其他接线说明 ...................................................................................................................... - 33 -3.3.1 地线连接..................................................................................................................- 33 -目录3.3.2 编码器差分输出接线 ..............................................................................................- 33 -3.3.3 数字输入接线 ..........................................................................................................- 33 -3.3.4 数字输出接线 ..........................................................................................................- 33 -3.3.5 手动控制制动器接线 ..............................................................................................- 34 -3.3.6 位置模式接线 ..........................................................................................................- 34 -3.3.7 内部速度模式接线 ..................................................................................................- 35 -3.3.8 外部速度/转矩模式接线图 .....................................................................................- 35 - 第四章设定 ...................................................... - 36 -4.1电机方向 .............................................................................................................................. - 36 -4.2状态参数 .............................................................................................................................. - 36 -4.3功能参数 .............................................................................................................................. - 37 -4.3.1工作控制模式 .........................................................................................................- 37 -4.3.2系统基本参数控制 .................................................................................................- 37 -4.3.3数字输入端口 .........................................................................................................- 38 -4.3.4内部控制信号 .........................................................................................................- 38 -4.3.5数字输出端口 .........................................................................................................- 41 -4.3.6脉冲端口输入输出 .................................................................................................- 41 -4.3.7目标到达状态判断 .................................................................................................- 42 -4.3.8位置环控制参数 .....................................................................................................- 43 -4.3.9模拟量输入参数 .....................................................................................................- 44 -4.3.10内部速度参数 .........................................................................................................- 45 -4.3.11速度环调节参数 .....................................................................................................- 45 -4.3.12转矩电流指令滤波参数 .........................................................................................- 45 -4.3.13控制限制参数 .........................................................................................................- 46 -4.3.14增益切换 .................................................................................................................- 47 -4.3.15速度模式加减速时间 .............................................................................................- 48 -4.3.16电磁制动器 .............................................................................................................- 48 -4.3.17报警保护配置 .........................................................................................................- 48 -4.3.18通讯参数设置 .........................................................................................................- 50 -4.3.19电流环控制参数 .....................................................................................................- 51 -4.3.20泄放参数配置 .........................................................................................................- 51 -4.3.21历史报警码 .............................................................................................................- 52 -4.4试运行 .................................................................................................................................. - 52 -4.4.1基本流程 .................................................................................................................- 52 -4.4.2JOG模式空载试运行(键盘面板上操作) ........................................................- 54 -4.4.3速度模式空载试运行(总线通讯操作) .............................................................- 54 -目录 第五章调整 ...................................................... - 55 -5.1控制模式的选择 .................................................................................................................. - 55 -5.2输入输出的配置 .................................................................................................................. - 56 -5.2.1输入信号端口分配 .................................................................................................- 56 -5.2.2输出信号端口分配 .................................................................................................- 57 -5.3基本参数 .............................................................................................................................. - 58 -5.3.1伺服使能 .................................................................................................................- 58 -5.3.2急停 .........................................................................................................................- 58 -5.3.3指令取反 .................................................................................................................- 58 -5.3.4零速到达 .................................................................................................................- 59 -5.3.5目标速度到达 .........................................................................................................- 59 -5.3.6速度一致 .................................................................................................................- 59 -5.3.7目标转矩到达 .........................................................................................................- 59 -5.3.8超程 .........................................................................................................................- 60 -5.3.9恢复出厂默认参数 .................................................................................................- 60 -5.4位置模式调整 ...................................................................................................................... - 61 -5.4.1脉冲指令方式的选择 .............................................................................................- 61 -5.4.2脉冲指令窗口滤波器 .............................................................................................- 61 -5.4.3脉冲指令平滑滤波器 .............................................................................................- 62 -5.4.4指令脉冲禁止功能 .................................................................................................- 62 -5.4.5电子齿轮的设定 .....................................................................................................- 62 -5.4.6位置到达信号 .........................................................................................................- 65 -5.4.7位置接近信号 .........................................................................................................- 65 -5.4.8位置超差警告 .........................................................................................................- 66 -5.4.9位置脉冲误差清零 .................................................................................................- 66 -5.5速度模式调整 ...................................................................................................................... - 66 -5.5.1外部模拟量速度模式运行 .....................................................................................- 66 -5.5.2内部速度模式运行 .................................................................................................- 67 -5.5.3加减速时间 .............................................................................................................- 68 -5.5.4零速给定 .................................................................................................................- 69 -5.6转矩模式调整 ...................................................................................................................... - 69 -5.6.1转矩指令增益的调整 .............................................................................................- 69 -5.6.2转矩指令偏移量的调整 .........................................................................................- 69 -5.6.3转矩指令方向的设置 .............................................................................................- 69 -5.6.4转矩指令低通滤波器 .............................................................................................- 69 -5.6.5模拟转矩指令零值箝位 .........................................................................................- 70 -目录5.6.6转矩控制时的速度限制 .........................................................................................- 70 -5.7共振抑制 .............................................................................................................................. - 71 -5.8转矩限制 .............................................................................................................................. - 72 -5.9增益切换 .............................................................................................................................. - 73 -5.10增益调整 .............................................................................................................................. - 75 -5.10.1速度环增益调整 .....................................................................................................- 75 -5.10.2位置环增益调整 .....................................................................................................- 75 -5.10.3增益调整注意事项 .................................................................................................- 75 -5.11电磁制动 .............................................................................................................................. - 76 -5.12编码器的输出 ...................................................................................................................... - 77 -5.13干扰对策 .............................................................................................................................. - 77 -第六章通讯 ...................................................... - 79 -6.1Modbus总线设置 ................................................................................................................ - 79 -6.2CAN总线设置..................................................................................................................... - 79 -6.3通讯协议 .............................................................................................................................. - 79 -第七章故障警告及处理 ............................................ - 80 -7.1报警代码 .............................................................................................................................. - 80 -7.2报警状态指示灯 .................................................................................................................. - 83 -7.3性能异常及解决办法 .......................................................................................................... - 83 -第八章维护与保养 ................................................ - 84 -8.1伺服电机的检查 .................................................................................................................. - 84 -8.2伺服驱动器的检查 .............................................................................................................. - 84 -产品概况第一章产品概况1.1 产品概况1.1.1 简介LS系列低压伺服驱动器(以下简称LS驱动器),是和利时电机根据市场需求推出的新一代高性能、高可靠产品。
Osprey ATMOS AURA AG LT系列 S22 用户手册说明书
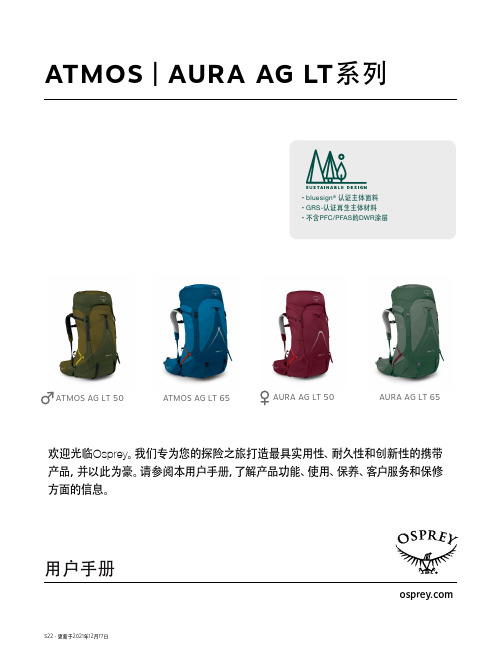
用户手册ATMOS | AURA AG LT 系列欢迎光临Osprey 。
我们专为您的探险之旅打造最具实用性、耐久性和创新性的携带产品,并以此为豪。
请参阅本用户手册,了解产品功能、使用、保养、客户服务和保修方面的信息。
ATMOS AG LT 50ATMOS AG LT 65AURA AG LT 50AURA AG LT 65• bluesign ® 认证主体面料• GRS-认证再生主体材料• 不含PFC/PFAS 的DWR 涂层23主体面料 bluesign ® 认证再生210D 尼龙蜂窝纹理,不含PFC/PFAS 的DWR 涂层装饰 b luesign ® 认证再生210D 高强力尼龙,不含PFC/PFAS 的DWR 涂层底部 b luesign ® 认证再生500D 高强力 尼龙,不含PFC/PFAS 的DWR 涂层通用1 内含防水罩 a采用不含PFC/PFAS 的DWR 涂层和bluesign ®认证材料2 两侧面板均设有弧形拉链开口3 活动顶盖,配多个绑扎点4 前部shove-it 快速取放口袋,采用强化面料5 侧面双开式大水壶袋6 上/下侧双压缩带7 双拉链式腰带口袋8 双重冰镐挂环,上侧压缩带挂钩9 可移除式睡垫固定带10内部储水仓,后部中央出水口产品承诺化繁为简的Atmos | Aura AG LT ,以流线型的轮廓为技术型背包客提供贴合身体的AntiGravity 悬挂系统。
这款背包比原有同类产品更轻,同时集合了多项简单贴心的功能。
AntiGravity 悬挂系统——连续的轻质网眼背板——将舒适性作为头等重要的体验。
ATMOS AG LT 65男款规格 S/M L/XL 立方英寸 3967 4150 升 65 68磅 4.07 4.25公斤 1.85 1.93 英寸33 h x 15 w x 13 d 35 h x 15 w x 13 d 厘米83 h x 39 w x 32 d 90 h x 39 w x 32 d 负载范围30-40磅 | 14-18公斤30-40磅 | 14-18公斤包含防雨罩防雨罩附加配件3L储水器3L储水器ATMOS AG LT 50男款规格 S/M L/XL 立方英寸 3051 3234 升 50 53磅 4 4.18公斤 1.82 1.9英寸33 h x 14 w x 12 d 35 h x 14 w x 12 d 厘米83 h x 35 w x 30 d 88 h x 35 w x 30 d 负载范围25-35磅| 11-15公斤25-35磅| 11-15公斤包含防雨罩防雨罩附加配件 3L储水器3L储水器AURA AG LT 65女款规格 WXS/S WM/L 立方英寸 3845 3967 升 63 65磅 3.84 4.01公斤 1.74 1.82 英寸31 h x 16 w x 12 d 33 h x 16 w x 12 d 厘米78 h x 40 w x 32 d 83 h x 40 w x 32 d 负载范围 30-40磅 | 14-18公斤30-40磅 | 14-18公斤包含防雨罩防雨罩附加配件 3L储水器3L储水器AURA AG LT 50女款规格 WXS/S WM/L立方英寸 2929 3051 升 48 50磅 3.79 3.97公斤 1.72 1.8英寸30 h x 14 w x 12 d 32 h x 14 w x 12 d 厘米75h x 35w x 30d 80 h x 35 w x 30 d 负载范围 25-35磅| 11-15公斤25-35磅| 11-15公斤包含防雨罩防雨罩附加配件 3L储水器3L储水器背负系统ANTI-GRAVITY 悬挂系统+4 mm 粉末涂层沿周框架ANTI-GRAVITY 背板+ 注塑成型的梯形主干调整系统,易于取物和操作+ 双色三明治网布增加强度+腰部区域带有防滑硅胶印,有利于传递负荷并增加舒适性ANTI-GRAVITY 背带+下侧采用冲切泡沫材料,上侧采用网眼ExoForm 包覆ANTI-GRAVITY 腰带+ 革命性AG 系统将拉紧的背板无缝延伸至腰带+ 腰带覆盖层与框架融为一体,确保一致性负载转移+ 可延展的量身调适Fit-on-the-Fly 腰带,精确贴合不同腰围+ 渐进式长度和角度调节,通过微调实现贴合+斜挎式ErgoPull 设计,拉紧腰带后即可让腰部承重负载调节带胸带LIGHTWIRE 框架ERGOPULL 腰带梯扣背带实现主干调节量身调适FIT-ON-THE-FLY ®腰带主干长度调节指引尺寸/贴合度ATMOS AG LT - 男款尺寸S/M 17-20.5英寸 / 43-52厘米L/XL19.5-23英寸 / 49-58.9厘米AURA AG - 女款尺寸WXS/S 13.5-17英寸 / 34-43厘米WM/L 16-19.5英寸 / 40.5-49厘米如何测量背包的背部尺寸女款专有设计+ 肩部、背板、腰椎和腰带部位独特的悬挂式网眼布可贴合各种体型和尺寸,带来舒适的背负体验。
安柏精密仪器有限公司AT527系列电池测试仪用户手册说明书

用户手册User’s GuideRev.A9固件说明:适用于主程序Rev.C1.02及以上的版本AT527系列电池测试仪安柏精密仪器有限公司电话:0512-********©2005-2018 Applent InstrumentsLtd..产品咨询联系电话:0512-63976842 AT527系列用户手册安全须知当你发现有以下不正常情形发生,请立即终止操作并断开电源线。
立刻与安柏科技销售部联系维修。
否则将会引起火灾或对操作者有潜在的触电危险。
●仪器操作异常。
●操作中仪器产生反常噪音、异味、烟或闪光。
●操作过程中,仪器产生高温或电击。
●电源线、电源开关或电源插座损坏。
●杂质或液体流入仪器。
安全信息为避免可能的电击和人身安全,请遵循以下指南进行操作。
免责声明用户在开始使用仪器前请仔细阅读以下安全信息,对于用户由于未遵守下列条款而造成的人身安全和财产损失,安柏科技将不承担任何责任。
仪器接地为防止电击危险,请连接好电源地线。
不可在爆炸性气体环境使用仪器不可在易燃易爆气体、蒸汽或多灰尘的环境下使用仪器。
在此类环境使用任何电子设备,都是对人身安全的冒险。
不可打开仪器外壳非专业维护人员不可打开仪器外壳,以试图维修仪器。
仪器在关机后一段时间内仍存在未释放干净的电荷,这可能对人身造成电击危险。
不要使用已经损坏的仪器如果仪器已经损害,其危险将不可预知。
请断开电源线,不可再使用,也不要试图自行维修。
不要使用工作异常的仪器如果仪器工作不正常,其危险不可预知,请断开电源线,不可再使用,也不要试图自行维修。
不要超出本说明书指定的方式使用仪器超出范围,仪器所提供的保护措施将失效。
产品咨询联系电话:0512-63976843安装和设置向导有限担保和责任范围常州安柏精密仪器有限公司(以下简称Applent )保证您购买的每一台AT527在质量和计量上都是完全合格的。
此项保证不包括保险丝以及因疏忽、误用、污染、意外或非正常状况使用造成的损坏。
品尝版前级修改电源及PK高文前级
品尝版前级修改电源及PK高文前级音源:论坛转盘参考资料:bbs.hifidiy/viewthread.php?tid=53636 解码器DAC:朝露CS4398 D2.5 朝露D1.1AD1852 平衡输出双1541 平衡输出(本次只选择了最高版本比较朝露D2.5 CS4398,运放已经改为OPA2228)前级:修改版本高文60V 电压版后级:马兰士PM-80(由于是前级对比,还是没用这合并机做后级,但可以告诉大家声音偏清秀整体平衡透明,很有特色)PASS后级AX100HI-FIZONE 产品,这次用了这当后级。
音箱:朝露X20 书架5 寸箱子, 4 寸全频自制箱子带超高单元。
自仿FB1 箱子修改版参考地址:bbs.hifidiy/viewthread.php?tid=75260PK 情况:自从做了高文修改版本后已经对它非常满意了,至少现在来看PK 后我还是认为它很有特点。
以前装了后感觉最特别的就是高音的解析度和低音的力度。
但现在对比修改后的品尝版前级少了点解析度多了点胆味。
怎么形容呢比较柔和的一面没有象品尝版那种速度感,可能在电位器上面也有差距的关系吧。
前级到了这级别都要看别的器材的搭配了,后级换下就很明显的听出区别,所以我只说到这里,接下来说下参赛的品尝版修改电源情况。
品尝版电源很简单但效果很好,但做为发烧友是永远不会满足现况的。
做了如下修改:电源是非常重要的,我使用了两个R 变单独供电。
我选择了蛙田式串联高速电源,蛙田式高速串联电源,抑制纹波系数高,速度快,音色表现为背景宁静,分析力强,偏清丽,用于打磨前级和功率放大器的电压放大级效果很不错。
和并联电源相比效率高输出残流噪声:0.1mV 输入电压:+_25 到+-。
5700A 5720A 系列 II 多功能校准仪 使用说明书

PN 3474006 (Traditional Chinese)May 1996, Rev. 1, 5/09© 2009 Fluke Corporation. All rights reserved. Printed in USA. All product names are trademarks of their respective companies. 5700A/5720A Series II Multi-Function Calibrator使用說明書目錄表標題頁碼本說明書的內容包括什麼? (1)使用安全摘要 (1)W保險絲和電源電壓 (2)基本操作 (2)簡短的校準程序練習 (2)暖機 (3)練習:直流歸零校準 (3)連接電錶 (3)施加直流電壓 (3)檢查校準儀的不準確度 (4)練習:啟動誤差計算模式 (4)檢查電錶的高低檔位 (4)練習:施加交流電壓 (4)前面板組件 (5)輸出顯示器(左邊) (5)控制顯示器(右邊) (5)顯示器保護裝置 (5)前面板按鍵 (5)前面板連接器 (10)後面板組件 (11)後面板連接器 (11)開關及保險絲座 (12)推薦電纜 (13)連接受測機器(Unit Under Test) (14)誤差計算模式的使用 (19)遙控操作 (19)RS-232-C 介面參數 (20)i5700A/5720A使用說明書iiSeries II Multi-Function Calibrator 本說明書的內容包括什麼? 1本說明書的內容包括什麼本說明書內包含如何安全使用本儀器的資料,一節簡單的儀表校準操作程序及本機使用手冊的摘要。
有關本校準儀詳細的特點、功能及操作程序,請參閱使用手冊(Operator Manual)使用安全摘要WX 警告本機各接頭可能產生致命的電壓。
請遵守本說明書的所有安全考量。
為避免觸電,操作者不可接觸到OUTPUT HI 或者SENSE HI 的連接柱。
FLUKE 多功能电气安全校准器 说明书
AmPac and Asia Regions VersionFLUKE Corporation / FLUKE International Corporation / PO Box 9090 / Everett WA 98206-9090 USA.(206) 356 5500 / FAX (206) 356-5116Page 1产品发布多功能电气安全校准器利用单台仪器校准和计量各种电气安全测试设备福禄克精密仪器部(FPM )发布了FLUKE5320A —— 一款多功能校准器,为各种各样的电气安全测试仪器的校准提供了齐全的功能和全面解决方案——高电压、大电流、大功率测量和驱动能力,所有这些都集成到了一台仪器内。
通过将多种功能集成到一台仪器,可以用一台校准器替代那些难以找得到的、高电压和大电流、大功率的电阻器和许多旧型号的仪器。
5320A 还包括一台精密数字多用表和电压校准器,可以完全校准多功能电气安装测试仪、兆欧表、环路测试仪、漏电保护测试仪、大地电阻测试、便携式电器设备测试仪、接地连接测试仪、医疗仪器电气安全测试仪,等等。
用户会对5320A 的精密度、可重复测量结果充满信心,并且会通过将5320A 与MET/CAL® Plus 校准管理软件相集成,实现自动化校准,从而实现生产力的大幅提高。
利用5320A 覆盖最多的被校准对象FLUKE 5320A 在单台仪器中集成了多种功能,可保证各种电气安全测试设备校准的产出效率和测量准确度。
谁是目标客户?主要的客户为直流/低频(DC/LF)校准实验室:第三方实验室内部校准实验室(公用事业部门、电信、电气制造厂商)部队/政府电气安全测试仪器制造商5320A的自动测试功能使其非常适合于生产测试和用于校准实验室。
被校准对象是什么?随着全球范围内电气安全标准的日益增多(包括英国的第16版测试标准和德国的VDE 0100及0700标准),电气安装和电器设备的测试成为电工和测试人员从事越来越多的常见任务。
5700A_5720AII系列多功能校准器用户手册

5700A/5720AII系列多功能校准器用户手册PN 601622May 19961996年5月© 1998 福禄克公司, 所有权利保留。
美国印刷所有产品名称都为各自公司的商标.安全须知警告高压该设备在工作时会使用到高电压致人伤亡的电压在设备的端钮上会出现致人伤亡的电压,请检查所有保护措施!为避免电击,使用者不可带电接触输出Hi 或Sense Hi接线柱。
在工作期间,在这些端钮上可能会出现能导致人身伤亡的1100V 交流或直流电压。
无论在何种操作条件下,请保持一只手远离设备,以降低电流流经身体生命器官的危险。
本手册中的术语本设备的设计和测试符合本手册第1章“技术参数”部分中“通用技术参数”中所列的安全标准。
本手册包括的信息和警告均是保证设备处于安全状态和确保安全操作必需遵守的。
警告:指示会造成人员伤害或死亡的危险操作或条件。
注意:指示会造成仪器损坏的操作或条件。
标注在仪器上的标志危险――高压保护地(大地)端钮。
注意:请参阅使用手册。
手册中有正确使用此功能的信息。
电源5700A II系列和5720A II系列应该工作于不高于264V真有效值电压的交流电源,对地电压亦不得高于264V。
为仪器安全工作,电源电缆中的连接地线必须可靠接地。
使用合适的保险丝为防止火灾,必须使用电压选择开关标签上指定的,与所使用的电源具有相同的额定电压和额定电流的保险丝。
5700A II 系列或5720A II系列校准器的接地5700A II系列和5720A II 系列校准器属于IEC 348中规定的I类安全(机箱接地)设备。
机箱通过电源电缆中的接地导线进行接地。
为避免电击,在将任何信号连接至5700A II系列和5720A II 系列校准器的端钮之前,请将电源插头连接至具有适当接地措施的插座内。
使用正确的电源线必须使用符合本国规定,能够使5700A II系列和5720A II 系列校准器正常工作的电源电缆以及插头和插座。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
院 中国科学院院士杨玉良:
士 之 声
投票未必能解决学术问题
本报讯 日前,在复旦大学庆祝建校 106 周年暨学术文化周活动上,中科院院士、复 旦大学校长杨玉良,中科院微电子所所长叶
甜春等青年专家学者与全校师生分享了自 己的学术经历。
其中,杨玉良就“该如何运行学术”等问 题进行了阐述。杨玉良认为,只有具备学术 专长的人才有权力对学术问题作出判断。因 此,一般领导不应进入学术委员会。
谢晓亮是单分子生物物理化学 和相干拉曼散射显微成像的开拓者 之一,他的研究为生物医学研究开辟 了崭新的途径。他的研究事业起步于 PNNL,也是该实验室聘请 的第一位 中国籍科学家。
PNNL 创建于 1965 年,现有员 工 4000 多 人,2010 年 预算为 8.55 亿 美元。PNNL 为何能造就谢晓亮这样 的科学精英?在最近《科学时报》对雷 和谢晓亮的专访中,二人谈到了 PNNL 对基础研 究和 科 研 人才 的 支 持。
机污染物会导致城市地区发生严 重的灰霾现象。这一研究发表在国 际期刊《大气环境》上。
(张行勇 曹军骥)
近 10 年 来,我国 主要 城 市乳 腺 癌
乳腺癌是女性发病率最高的 恶 性 肿 瘤 之 一 ,2010 年 的 最 新 调 查 数 据 显 示 ,平 均 每 3 分 钟 ,世 界 上就有一名妇女被诊断为乳腺癌;
中科院地球环境所研究表明:
华北平原大气环境人为污染严重
本报讯 中科院地球环境研究所 研究员王格慧及其团队通过对关中 平原和华北平原两个典型高山华山 和泰山春季大气气溶胶的同步观 测,发现除硫酸盐之外,泰山地区 EC(元 素 碳)、OC(有 机 碳)、硝 酸 盐、铵盐等是华山地区的 2~10 倍, 表明华北平原人为污染严重。这一 研究成果发表在最新出版的国际期 刊《大气化学与物理》上。
术独立和思想自由。”
(黄辛 陆洋)
中国工程院院士陈鲸:
科学的终极价值是人文
杨玉良 陈鲸
本报讯“从本质上讲,科学技术是一种 人文活动,科学的终极价值是人文价值。”日 前在成都理工大学首届大学生科技文化节 上,中国工程院院士陈鲸作上述表示。
陈鲸表示,现代科技给人类发展提供 动力的同时,对价值观、伦理道德带来强烈 冲击。“科学无法解决我们的心灵问题,只 有人文思想才能解答人类发展道路上的种 种疑团。”
的基础。”陈鲸最后表示。
(彭丽)
发现窑进展
乳腺癌内分泌治疗耐药机制被揭示
本报讯 在国家自然科学基金重 大研究计划和“973”等项目资助下,军 事医学科学院蛋白质组学国家重点实 验室张学敏课题组与解放军总医院韦
立新课题组联合攻关,在乳腺癌内分 泌治疗耐药机制研究中取得重要进 展,5 月 16 日出版的《自然—医学》在 线发表了有关研究报告。
PNNL 位于 美 国 华 盛 顿 州 东 南 部哥伦比亚河和亚基马河交界的沙 漠地带,在第二次世界大战“曼哈顿 工程”里生产美国原子弹核材料的汉 福德基地的基础上建成。PNNL 最初 的任务是从事原子弹核材料生产的 研究,20 世纪 80 年代末开始 从事基 础研究。
汉 福德 基 地创 立 于 1943 年 ,这 里建造了世界上第一座钚生产反应 堆,为美国的核发展立下了汗马功 劳。然而核材料的生产也严重污染了 环境,能源部从 1977 年开始接管基 地,1987 年,最后一个核反应堆停止 运行,汉福德成为美国埋藏核废料最 多的地方。
PNNL 最 初 找 的 人 并 不 是 谢 晓 亮。
PNNL 当 时想 邀 请 加 州 大 学 圣 地亚哥分校教授约翰?西蒙(John Simon)加 入 ,但 西蒙 却 推 荐了 自 己 的 博士生谢晓亮。谢晓亮 1984 年在北 京大学化学系获得学士学位后,赴加 州大学圣地亚哥分校跟随西蒙攻读 博士,1990 年获博士学位。之后他在 芝加哥大学教授格雷厄姆? 弗莱明
5 月 25 日,中国人民公安大学在 该 校 北 京 团 河 校 区 对 1000 余 名 2011 届本科毕业生进行了警用车 辆 装备使用专项培训,让学生了解和掌 握交警信息采集车、警用自动路障车、 现场指挥车、护卫摩托车等常用警务 车辆车载设备的配置、功能及使用方 法。
公安大学 副校长席艳 丽表示,开 展警用车辆装备使用专项培训,目的 就 是要 让毕 业生 进入 公安 队伍 后,无 论是在哪个警种、哪个岗位工作,都能 独立使用各种警用车辆及车载装备, 发挥车辆及装备的效能,彰显公安大 学学生的警务综合素质和人才培养特 色。
据介绍,高山由于昼夜温差大、
太阳辐射强烈、湿度大,大气环境与 地表不同,高山大气气溶胶的理化
性质也与地表城市气溶胶有所差 异。由于高海拔,高山气溶胶更容易 进入云层,因而和地表相比,对云的 影响更为显著。此外,高山气溶胶更 多的来自于长距离迁移,因而对高 山地区的研究,能够在更大尺度上 反映大气环境特征。
陈鲸指出,在思维方式与学术领域划
分上,科学与人文属于不同范畴。但在哲学
上,它们存在着深刻的内在联系。科技活动
如不能为人类带来幸福,人们的努力将毫
无意义,而且可能是有害的。缺乏人文精神
的科技工作者,常常是一些“令人讨厌的
人”。
“科学技术是真学问,人文精神是大智
慧。丢失科学,就放弃了立足世界的基础;
而丢失人文,则失去为人之本与和谐社会
陈鲸认为,“科学”与“人文”是人类文
明的两翼,走两种文化的融合之路,才是合 理的价值选择。必须提高科技工作者的人 文修养,形成保障重大科技活动决策正确 的社会氛围,使决策者在现实与未来的博 弈中高瞻远瞩。
陈鲸将近年来学术造假的原因归结为 科技工作者人文精神的匮乏。“这些行为不 但毁损人类神圣的价值观,还践踏了科学 事业及人类的良知。”
在当时是一个难以置信的大胆想法。 但他如此优秀,又受过很好的训练, 我们相信,如果有人能做出这个技 术,这个人就应该是他。因此科森决 定聘请他。实验室为他建立了研究团 队,提供所需要的 研究资源,推动他 的发展。晓亮最终成功了,这是他的 第一份工作,这是一个伟大的开始。 我们为他高兴!”
(下转 A2 版)
学术 委 员 会 应 该 如 何 对 学 术 作 出 判
断呢?杨玉良强调,学术委员会的内部管 理也是一种行政,有人称之为“学术行 政”。但杨玉良对目前学术委员会采用民
主投票的方式来决定学术问题持质疑态 度。
杨 玉 良 说 :“几 乎 任 何 一 个 学术新理 论提出时,都是掌握在少数人手里,而民主 的基本原则是少数服从多数,这样就很容易 导致多数人对少数人的权利干预,甚至是精 神上或者物质上的暴力。例如,柏拉图因为
A4 版 美助天花再获野死缓冶
这一次,一个在死囚牢里等了几十年的犯人又一次得到了缓 刑,它就是天花病毒。世界卫生大会(WHA)于 5 月 24 日决定,推迟 3 年讨论是否销毁现存的天花病毒样本。
B1 版 汤定元院掌握自我命运的钥匙
在知名物理学家、中科院院士汤定元 91 岁生日之际,由科学出版 社出版的“科学与人生———中国科学院院士传记”系列之《汤定元传》 出版。这部传记为读者们展示了汤定元院士不平凡的人生道路。
科森选拔了一群优秀的年轻科 学家组成团队,这其中就包括雷和谢 晓亮。这批年轻人后来都得到了能源 部长期经费的资助。
雷于 1985 年在加州大学伯克利 分校获得化学博士学位,之后在美国 天 体物 理 联合 实 验 室(JILA)做 博 士 后 ,1990 年 加 入 PNNL。“ 初 到 PNNL,我们都被鼓励做最 前沿的基
(Graham Fleming) 的实 验 室 做 博 士 后。
PNNL 于是 转 而 邀 请 谢 晓 亮 来 面试。在面试时,谢晓亮提出要作室 温下的单分子光谱成像研究,但这并 不是实验室的方向,实验室希望他用 超快激光研究生物系统和复杂环境 系统的行为。
雷是当年谢晓亮面试委员会成 员之一,他说:“他提出要做的研究,
据了解,为 培养毕业生第 一任 职 能力,公安大学整合教学资源,加强与 实战部门合作,为 2011 届毕业生安 排了一系列的专项培训活动,包括现 场勘察、群众工作、处突防暴等多项内 容。
图为公安大学学生在听教练员讲 解 GL1800 两轮警用护卫摩托车的使 用方法。 (孙琛辉 / 文 刘一 / 摄)
责任编辑院丁佳
阴新闻热线院园员园原愿圆远员源缘愿猿 阴总编室电话院园员园原愿圆远员源缘97 阴电子邮箱院news岳泽贼蚤皂藻泽援糟灶
础研究。我的工作是用激光光谱从事 表面科学研究。”
寻找最好的人
“科森选拔人才的理念是寻找世 界上最好的天才,帮助他们建立团 队,给他们最好的支持,再 向他们提 出挑战,看他们是否能迎接挑战。” ———道格拉斯?雷
使命演变
“我喜欢基础研究,我很幸运能 在 PNNL 开始我的职业生涯。我可 以自由地做我喜欢的科研,不用担心 经费问题。如果我是在大学里开始我 的事业,我可能不会去做那么难的工 作,也就不会有我的今天。”———谢晓 亮
在一个以目标驱动为中心的国 家实验室,自由从事自己热爱的研 究,谢晓亮的幸运有着天时、地利、人 和的时代背景。
此外,王格慧课题组通过对南 京 市夏季灰霾事件研究发现,农村
麦秆焚烧 会大量释放出甘油醇、葡 萄糖、左旋葡萄糖苷等有机物。它 们扩散至城市地区,与机动车尾气 相 耦 合 ,在 适 宜 气 象 条 件 下 ,相 互 凝并,使得颗粒物粒径显著增大, 导致严重灰霾。这一结论从机理上 揭示了农村秸秆焚烧所释放的有
主 办院
中国科学院 中国工程院 国家自然科学基金委员会
姻网址院澡贼贼责押 辕 辕 憎憎憎援泽糟蚤藻灶糟藻net援糟灶 姻国内统一刊号院悦晕员员原园园愿源 姻邮发代号院员原愿圆 姻中国科学院主管 姻科学时报社出版
圆园11 年 5 月 26 日 星期四
辛卯年四月二十四
总第 5229 期 今日八版
今日导读
20 世纪 80 年代末开始,联邦政 府每年投入 20 亿美元用于汉福德基 地的核废料处理,这也成为世界最大 的环境治理项目。PNNL 的工作重点 也从核材料的研制转移到环境科学, 包括核废料的迁移与储藏等。