电梯设计说明书
电梯改造设计说明书
电梯改造设计说明书使用单位:改造单位:根据惠州某某理有限公司单位需求,要对两台电梯轿厢重新装饰,装饰后由于改变了轿厢质量,按《电梯施工类别划分表》和检规要求,应对设备重新计算载重量是否符合相关要求,现制定该电梯改造设计说明:1.原电梯基本参数:电梯出厂编号:原制造单位:额定载重量:825kg,额定速度:1.75m/s,层站门:11层11站11|1电梯轿厢的有效面积:1.96m2(轿厢宽135Omm深1400mm),2.改造后变更为:额定载重:75Okg(IO人)电梯轿厢的有效面积轿厢宽134Omm深1380mm3.电梯轿厢质量增加109.6kg(见电梯改造清单),并做质量的验算依据GB7588-2003标准中F3.4项要求:对于渐进式安全钳,给出的质量可以与F3.3.3规定的允许质量相差±7.5%β4.质量计算:轿厢空载质量P:946kg,额定载重Q:750kg,安全钳总质量:185Okg,缓冲器总质量:2800kg,5.改造前现场材料:1.安全钳铭牌2.吊起轿厢称重3.轿厢称重读数4.缓冲器铭牌a.计算安全钳质量:P+Q+Pl=946+750+109.6=1805.6kg质量);(式中P1:装修增加b.验算安全钳质量:1805.6kg<1850kg;安全钳质量在允许范围内,电梯乃能符合9.8.4的减速度规定;C.现场缓冲器质量:2800kg〉安全钳质量:1805.6kg,结论:符合要求。
6.改造后根据载荷试验应满足平衡系数试验在0.40~0.50之间。
根据现场测量及计算电梯的运行速度不变,其它主要安全部件(曳引机、控制柜、安全钳、缓冲器、门锁)不变,符合相关技术规范GB7588-2003《电梯制造与安装的安全规范》的要求。
7.改造后由政府相关检测机构验收合格后方可投入使用改造前图片改造后效果图使用单位:单位:盖章确认:盖章确认:。
上海现代STVF电梯系统说明书
消防应急返回 门安全保护
主层站上的消防开关被启动,所有召唤均被取消,电梯立即驶往消防撤 离站停靠,开门。
在关门过程中,如安全触板,乘客接触,电梯门立即反向开启(或采用 光幕保护,当关门过程中有乘客进入,门立即开启。)
超载保护措施
当轿厢超载是,电梯不关门且蜂鸣器响。
逆向运行保护
系统检测到电梯 3 秒运行的方向与指令方向不一致时立即紧急停车,故 障报警。
防打滑保护
系统检测到钢丝绳打滑将停止轿厢一切运行,故障报警。
防溜车保护 终端开门越城保护
系统检测到在电梯停梯是,连续 3 秒钟有反馈脉冲产生,并且平层信号 发生变化,就判定电梯发生溜车,立即停止轿厢一切运行,故障报警。
电梯的上下终端都装有终端减速开关,限位开关,极限开关以保护电梯 不会越城。
司机专用功能
用于大载重量的电梯,以便让轿内更多的乘客方便使用。
应急停靠装置 集中监控功能 层门预报灯闪烁
停电后,充电式电池提供电梯电源,电梯驶往最近楼层平层,开门疏散乘客。
监控计算机安装在大楼监控室等场所,通过 CAN 局域网监视每台电梯运行状况, 信号状况,故障状态。
层门指示灯的闪烁来向等候在电梯厅内的乘客指示轿厢到站及其运行方向。
小忠忠 提供
STVF 电梯介绍说明
毕业生电子设计 模拟电梯论文 说明书

湄洲湾职业技术学院模拟电梯说明书系别:自动化工程系年级:10级专业:电气自动化技术姓名:学号:1001020244导师姓名:陈辉煌职称:讲师2013年 5 月26日1.前言 (1)2.系统设计计数参数要求 (2)3.系统设计 (3)3.1系统设计总体框图 (3)3.2 各模块原理说明 (3)3.3 系统总原理说明 (3)3.4系统设计原理图 (4)3.5系统的操作说明 (4)3.6 系统操作注意事项 (5)参考文献 (6)致谢词 (7)附录 (8)附录1 系统印刷电路板的制作图 (8)附录2 源程序. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..9附录3 元件清单 (14)随着现代高科技的发展,住房和办公用楼都已经逐渐向高层发展。
电梯是高层宾馆、商店、住宅、多层仓库等高层建筑不可缺少的垂直方向的交通运输工具。
1889年美国奥梯斯升降机公司推出的世界上第一部以电动机为动力的升降机,同年在纽约市马累特大厦安装成功。
随着建筑物规模越来越大,楼层也越来越高,对电梯的调速精度、调速范围等静态和动态特性都提出了更高的要求。
由于传统的电梯运行逻辑控制系统采用的是继电器逻辑控制线路。
采用这种控制线路,存在维护不便、运行寿命较短、容易出故障、占用空间大等缺点。
目前,由可编程控制器(PLC)或微型计算机组成的电梯运行逻辑控制系统,正以很快的速度发展着。
可编程控制器,是微机技术与继电器常规控制技术相结合的产物,是在顺序控制器和微机控制器的基础上发展起来的新型控制器,是一种以微处理器为核心用作数字控制的专用计算机,它有良好的抗干扰性能,适应很多工业控制现场的恶劣环境,所以现在的电梯控制系统主要还是由可编程控制器控制。
但是由于PLC的针对性较强,每一台PLC都是根据一个设备而设计的,所以价格较昂贵。
蒂升电梯ENTA200产品说明书

enta200体验温馨时刻蒂升(蒂森)电梯,上下求索,塑造城市交通的未来enta200体验温馨时刻提升高度:≤ 45m 楼层数量:≤ 15层无机房产品适用范围enta200是一款结构紧凑的无机房电梯,时尚温馨的轿厢内饰带给乘客舒适乘坐体验。
凸显您的格调流行内饰设计完美匹配您的楼宇,自始至终呈现高端风格。
增加您的回报性能卓越,德国技术,更具投资价值。
焕新您的体验营造舒适的轿厢氛围,提升整体乘梯体验。
额定速度:≤ 1.0m/s 额定载重:≤ 630kg04增加您的回报性能卓越,德国技术,更具投资价值。
全生命周期的无忧服务遵循多种标准的严苛要求从产品设计到制造及最后准时交付,蒂升电梯的专业和高效将给您提供完美服务。
简化的工艺流程、更短的项目安装工期,我们严谨的验收流程确保更快的交付高质量的产品。
根据严苛的蒂升电梯产品设计标准进行设计、测试和制造。
符合乘客电梯中国国家标准。
井道尺寸变小意味着可以提供更多的可用面积曳引机采用了更小更轻便的设计,只需一个简单的顶层结构,从而释放了被机房占用的空间。
这种设计优化了井道的布局,使高轿厢成为可能。
选用浅底坑设计和灵活的轿厢尺寸,即使受到现有井道的限制,也可以释放更多轿厢空间。
独有的浅底坑设计*方案,能更好的应对井道环境。
* 仅适用于无需政府验收的情况。
0506凸显您的格调流行内饰设计完美匹配楼宇,自始至终呈现高端风格。
设计紧随潮流趋势,与楼宇风格完美搭配。
搭配流行元素的轿厢设计,让电梯完美融入建筑,提升您的楼宇品位。
0708吊顶让电梯完美融入您的建筑,为您的轿厢提供更多的选择。
可选 1 流光 (S1-C1)可选 2 翠晶(S2-C2)可选 3 莹耀(S3-C1)可选 4 皓耀(S3-C2)可选5 透映(S4-C1)12345注: 样本所载吊顶效果图是基于400kg 载重制作。
本手册中产品效果图仅供参考,应以实物为准。
0910* 为可选配置焕新您的体验智能的安防功能设计,舒适平稳的乘梯体验,让您的日常使用流畅而又安心。
NICE1000电梯F2.F3功能参数说明-60
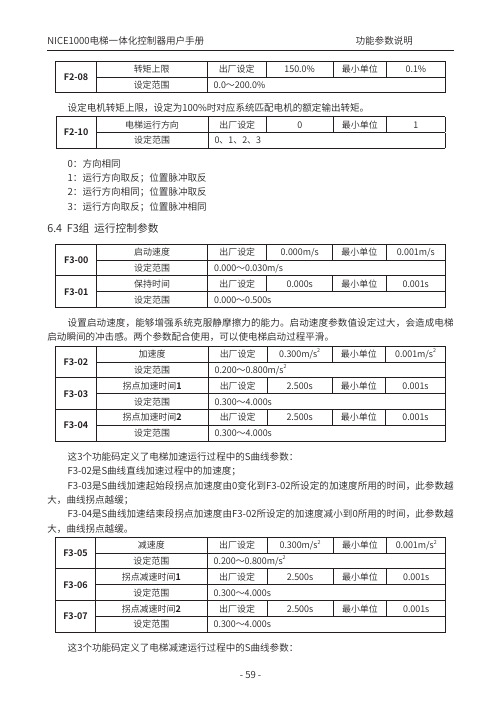
NICE1000电梯一体化控制器用户手册 功能参数说明F2-08转矩上限出厂设定150.0%最小单位0.1%设定范围0.0~200.0%设定电机转矩上限,设定为100%时对应系统匹配电机的额定输出转矩。
F2-10电梯运行方向出厂设定0最小单位1设定范围0、1、2、30:方向相同1:运行方向取反;位置脉冲取反2:运行方向相同;位置脉冲取反3:运行方向取反;位置脉冲相同6.4 F3组 运行控制参数F3-00启动速度出厂设定0.000m/s最小单位0.001m/s设定范围0.000~0.030m/sF3-01保持时间出厂设定0.000s最小单位0.001s设定范围0.000~0.500s设置启动速度,能够增强系统克服静摩擦力的能力。
启动速度参数值设定过大,会造成电梯启动瞬间的冲击感。
两个参数配合使用,可以使电梯启动过程平滑。
F3-02加速度出厂设定0.300m/s2最小单位0.001m/s2设定范围0.200~0.800m/s2F3-03拐点加速时间1出厂设定 2.500s最小单位0.001s设定范围0.300~4.000sF3-04拐点加速时间2出厂设定 2.500s最小单位0.001s设定范围0.300~4.000s这3个功能码定义了电梯加速运行过程中的S曲线参数:F3-02是S曲线直线加速过程中的加速度;F3-03是S曲线加速起始段拐点加速度由0变化到F3-02所设定的加速度所用的时间,此参数越大,曲线拐点越缓;F3-04是S曲线加速结束段拐点加速度由F3-02所设定的加速度减小到0所用的时间,此参数越大,曲线拐点越缓。
F3-05减速度出厂设定0.300m/s2最小单位0.001m/s2设定范围0.200~0.800m/s2F3-06拐点减速时间1出厂设定 2.500s最小单位0.001s设定范围0.300~4.000sF3-07拐点减速时间2出厂设定 2.500s最小单位0.001s设定范围0.300~4.000s这3个功能码定义了电梯减速运行过程中的S曲线参数:- 59 -。
康力电梯产品说明书

康为电梯股份有限公司CANNY ELEVATOR CO. LTD.。
地址:江苏省汾湖高新技术产业开发区康力大道888号。
电话:0512-********。
传真:0512-********。
网址:w w w ,ca n n y -e l e v at o r ,c om。
电子信箱:(国内)marketing@canny-elevato『.com(国外)export-canny@163,comexpo『t@canny-elevator,com0400客户服务热线:400-188-2367。
邮编:215213组恼二维码关注康力电惊微{言公众号Sea,阳QRcode a 咱问’aM<nl01阳C邮lNYELEVATOR weer.: f'\,�c 。
Add:No.888, Kangli Road, FOHO New & Hi-Tech Industrial Development Zone, Jiangsu Province, China. IOTel: +86-512-63290000 63297851 。
F ax:+86-512-63299709 。
U R L : O E -ma il :*********************************************O P .C : 215213本书为-般信息类出版物,资ff)保留随时更破产品设计和说明的叙利,所有图片和颜毡可能与实中拥有所不同.请以实物为;住股力电梯股份有限公司。
版权所有2015-Vl.0版《》叽@烹F旦赞l<LF每秀自动扶梯LINGSHOW ESCALATOR辑秀自动扶梯Lings h owEscalator锺秀风范Lingshow Style目质\科技\人性政力镇秀系列自动挟t荡,m现代妖锦领域的前;a技术、多样化]力能之大戚,引领自动j夫梯制远新潮流.在秉承康为电钱一贯的精湛科技基础上.更;主ili融合人性化的至离理念,蕴含对窑户需求的细心体察.彰显科技留,!,.\.Quality\ Technology\ humanity1ngshow escalato「integrates the cutting-edge technolOQy and diversifiedlunchons of modern escalator and leads the new trend or escalatormanufactL1nng. On a consistent basis or superb technology, CAN NYELFVATOR pays more attention lo adding the noble human-onenled concept,obseNing customer’s needs carefully, and h1ghlight1ng the technolog1calw1sdorn.·围裙板刷防止乘客衣物被夹入回宿板和梅级侧边间隙中,以{知户乘客安全Skirt Panel BrushPrevent passengers’clothing from be i ng caught by theapron board and the step臼ide gap. in order to p rot eιt the safety of passengers. Large Radius RotaryHandrail Guide RailLarge radius rotary ha n dr a i l g u i d e rail willwork together with the rotary wheel set to『educe r ic t i on and prolong the life of thehandrail.。
人货电梯平面布置方案
人货电梯平面布置方案在设计人货电梯的平面布置方案之前,我们首先要明确电梯的功能和使用场景。
人货电梯既要满足运送人员的需求,又要能够搬运货物,因此需要考虑人员与货物的同时存在和安全使用的问题。
下面是一个1200字以上的人货电梯平面布置方案:一、电梯基本参数1.承载能力:根据使用场景需要,我们选用承载能力为1000公斤的电梯。
2.速度:选择适中的速度,保证电梯的安全性和舒适性,一般选用每秒0.5米的速度。
3.站数:根据建筑楼层数确定站数,我们设计的电梯适用于高层建筑,设有20层站点。
1.轿厢设计电梯轿厢采用双开门的设计,以便于货物的装卸和移动。
轿厢尺寸为2.5米(宽)*3.5米(深)*2.5米(高),采用不锈钢材质,坚固耐用,方便清洁。
门厅门和轿厢门都设置安全门感应装置,确保人员和物品的安全。
2.神经网络传感器为了提高人货电梯的安全性能,我们在电梯内装置了神经网络传感器,通过感应乘客身体的移动以及货物的装卸情况,监测并及时识别潜在的安全隐患,如行李卡住门缝、人员意外受伤等,以最快的速度报警并停止运行,保证人员和货物的安全。
3.轨道和导轨设计为了确保电梯的运行平稳,我们采用了优质轨道和导轨。
轨道制造材料为高强度铁质,表面经过镀锌处理,防止生锈。
导轨采用高级合金材质制成,具有较高的耐磨性和抗腐蚀性能。
4.按钮和控制面板设计为了方便乘客的操作,我们设计了简洁明了的按钮和控制面板。
按钮采用大面积触摸屏设计,设有楼层按钮、开门按钮和关门按钮。
控制面板位于轿厢内部和门厅上,便于乘客和工作人员的操作。
5.安全装置6.门厅设计电梯门厅设置在每层楼的入口处,方便乘客进出。
门厅面积设计合理,不妨碍正常通行和交互。
门厅内部还配备了候梯区,乘客可以在这里等待电梯。
门厅地面和墙壁采用防滑和防污材料制作,易于清洁和维护。
7.底坑和顶坎设计为了确保电梯在起停过程中的顺畅运行,我们在底层设置了足够的底坑,以便轿厢能够安全停在底层。
电梯双向限速器设计说明书
电梯双向限速器设计说明书1.概述1.1设计任务电梯双向限速器1.2限速器主要技术参数速度:10.4m/sV=,20.8m/sV=,31.0m/sV=;质量中心与摆动中心距离:19.738mmS=;摆杆质量:186g0.186kgm==。
2.总体方案设计电梯限速器,是电梯安全保护系统中的安全控制部件之一。
当电梯在运行中无论何种原因使轿厢发生超速,甚至发生坠落的危险,而所有其他安全保护装置不起作用的情况下,则限速器和安全钳发生联动动作,使电梯轿厢停住。
本次设计为双向限速器,通过查阅相关资料,及比较原有限速器结构尺寸,现设计出的限速器结构尺寸,如图2-1所示。
图2-1 限速器结构尺寸图1—导轮轴2—弹簧挂轴1 3—拉伸弹簧4—开关轴挡5—弹簧挂轴2 6—弹簧张力板7—棘爪8—棘爪轴承套9—凸轮10—滑轮11—挡圈12—立板(左)13—立板(右)14—隔套2 15—棘爪轴16—棘轮架17—滑轮轴18—滑轮架底板19—导轮3.主要部件设计3.1 棘爪设计经过实际仿真模拟,确定棘爪为图样形式,如图3-1。
3.2 棘轮设计经过实际仿真模拟,确定棘轮为图样形式,如图3-2。
4.主要部件校核计算4.1棘爪摆杆离心力的计算速度:10.4m/s V =20.8m /s V = 3 1.0m /s V =摆动高度:()148.7128/210.35mm -=,如图4-1图4-1 凸轮结构尺寸时间:12310.3510.3510.3525.88s,12.94s, 6.47s 0.40.81.0T T T ======根据公式: ,/,0.137m V Dn n V D D ππ===10.9298r/s n =,2 1.8597r/s n =,3 3.7194r/s n =转一圈所用时间:111 1.0756t s n ==,2210.5377t s n ==,3310.2689t s n ==转1/8圈所用时间:'1110.1344s 8t t ==,'2210.0672s 8t t ==,'3310.0366s 8t t ==质量中心与摆动中心距离:19.738mm S = 摆动高度:148.712810.35mm 2-=如图4-110.35sin 0.524431.62790.5517rad'0.5517rad 19.738s ϕϕ===︒==摆杆角速度:1'12'23'3'0.5517 4.1049r/s0.1344'0.55178.2098r/s0.0672'0.551716.4196r/s 0.0336s t s t s t ωωω=========加速度:()/,=0a R t ωωω=-末初初()()()()()()'2111'2222'2333/ 4.104900.1072/0.1344 3.27m/s /8.209800.1072/0.067213.10m/s /16.419600.1072/0.033652.39m/s a R t a R t a R t ωωωωωω=-=-⨯==-=-⨯==-=-⨯=初初初 质量:186g 0.186kg m ==离心力:1122330.1860.610.186 2.440.1869.74F maF a N F a N F a N==⋅==⋅==⋅=4.2弹簧力的计算1.弹簧处于如图4-2所示位置时: 弹簧原长度:163mm x =现在长度:2117.3mm x == 伸长量:117.36354.3mm x ∆=-= 根据虎克定律:F K x =⋅∆弹弹性常数()()43/8mc K Gd D N =⋅⨯⨯, 其中,经查表G =79000N/mm 2,d 为线材直径,d =0.7mm ,D m 为弹簧中径,D m =10mm ;N c 为有效圈数,N c =53/0.7-2=74圈。
NICE1000电梯功能参数说明-63
功能参数说明 NICE1000电梯一体化控制器用户手册6.5 F4组 楼层参数F4-00平层调整出厂设定30mm最小单位1mm设定范围0~60mm用来保证电梯平层精度,当电梯停车时,平层感应器不在隔磁插板中部时修改此参数。
电梯停车时,若越平层则减小F4-00的设定;欠平层则增大。
此参数根据平层插板的长度设定。
F4-01当前层楼出厂设定1最小单位1设定范围F6-01~F6-00显示电梯轿厢当前所处位置。
系统在运行过程中会自动修改此参数,并且在上、下强迫减速开关触发后,在平层位置(开门到位)会自动校正该参数。
在非底层和顶层楼面时,用户也可手动更改此参数,但此参数必须和实际的当前楼层数相符合。
功能码名称出厂设定最小单位设定范围F4-02电梯当前位置高位110~65535F4-03电梯当前位置低位3446410~65535显示轿厢当前位置相对于最底层平层位置的绝对脉冲数。
功能码名称出厂设定最小单位设定范围F4-04平层插板长度1010~65535F4-05平层插板长度2010~65535实际平层插板的长度对应脉冲数,井道自学习时自动记录,用户可根据实际情况适当修改。
功能码名称出厂设定最小单位设定范围F4-06层高1高位010~65535F4-07 层高1低位010~65535┆┆┇┇┇F4-22层高9高位010~65535F4-23层高9低位010~65535层高i是第i层与第(i+1)层的平层插板之间的高度对应的脉冲数。
每一个层高都对应一个32位二进制数,其中高16位对应此层高高位,低16位对应此层高低位。
例如:4楼到5楼的层高为F4-12=6,F4-13=54321,二进制表示为:0000,0000,0000,0110,1101,0100,0011,0001则实际脉冲数以十进制表示为447537。
6.6 F5组 端子输入功能参数功能码名称出厂设定最小单位设定范围F5-00司机、自动切换时间3S13~200S在司机状态下当非本层有召唤时, 经过F5-00时间后如无人操作,则自动转为自动(正常)- 62 -。
电梯施工方案设计文件范本
电梯施工方案设计文件范本1. 引言本文档是为了指导和记录电梯施工方案的设计过程,确保施工顺利进行并达到预期效果。
本文档包括了电梯施工方案的设计要求、设计方案、施工流程、安全考虑等内容。
2. 设计要求2.1 功能要求•电梯需满足国家和地方相关的电梯安全法规和标准要求。
•电梯设计应考虑各种使用需求,如载重能力、速度、楼层覆盖范围等。
•电梯应满足残疾人士和老年人的使用需求,包括无障碍设计和紧急救援设备。
•电梯应具备安全可靠的运行机制,包括各种安全传感器和紧急停机装置。
2.2 结构要求•电梯结构设计应满足承载能力和抗震要求,确保在地震等灾害情况下的安全性。
•电梯井道和机房的设计应满足通风、防潮和防火要求。
•电梯轿厢和门设计应考虑人员舒适度和安全性。
•电梯的供电和控制系统设计应满足电气安全要求。
3. 设计方案3.1 电梯类型本项目选择用于住宅楼的乘客电梯作为设计方案。
3.2 电梯参数•载重能力:1000kg•电梯速度:1m/s•楼层覆盖范围:4层3.3 电梯结构设计•电梯轿厢和门使用优质钢材制造,结构坚固可靠。
•电梯井道和机房采用防火材料进行装修,确保安全。
•电梯井道和机房配备通风设备,以保持良好的空气流通。
3.4 电梯供电和控制系统设计•电梯供电系统采用稳定可靠的电力供应,确保电梯正常运行。
•电梯控制系统采用先进的电梯控制器,具备应急救援功能。
•电梯配备安全传感器,能够及时检测到异常情况并采取相应措施。
4. 施工流程4.1 施工准备•准备施工所需的材料和工具。
•搭建安全施工平台和围栏。
4.2 井道和机房施工•完成井道和机房的土建工程。
•安装井道和机房的门和通风设备。
4.3 电梯轿厢和门施工•安装电梯轿厢和门。
•进行电梯轿厢和门的调试和测试。
4.4 电梯供电和控制系统安装•安装电梯供电和控制系统设备。
•进行电梯供电和控制系统的调试和测试。
5. 安全考虑•在施工过程中,严格遵守相关安全规定,确保施工安全。
•安装安全警示标志,提醒施工人员注意安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设计说明书题目:基于PLC的电梯运行控制模拟实验教学系统---------- 控制策略及主程序设计**:***班级:07机械电子工程学号:*************师:**所在院系:机械工程学院完成日期:2011年6月5日答辩日期:2011年6月10日基于PLC的电梯运行控制模拟实验教学系统摘要本文针对PLC及电梯教学的需要,介绍了由PLC控制的自我设计的四层电梯模型的构成、设计要求、编程方法及程序等。
对电梯模型采用PLC控制系统的设计进行了描述,希望通过实际教学的应用,积累宝贵的经验,在教学方面具有较好的实用价值。
本设计是数控工作台的设计,该控制系统由微机部分、键盘、LED、I/O接口、光电偶合电路、步进电机、电磁铁功率放大器电路等组成。
系统的控制部分采用软、硬件结合的方法设计。
该设计系统基于功能强大的AT89S51单片机为核心,配以必要的传感装置,在X 和Y方向均有一个步进电机,利用单片机控制步进电机,使其按三相六拍运行方式运行,并且通过编写汇编程序,可以实现各种复杂的控制,使其按预定的运行规则和程序,发出控制信号控制步进电机的转速,运用步进电机来驱动传动部分,从而控制数控工作台的运行速度和时间,LED为显示系统,用于实时显示工作台的运行方向。
从而实现系统设计要求,实现该数控工作台的基本功能。
关键词:电梯模型,PLC控制,程序设计NUMBER OF CONTROL WORK STATION DESIGNAbstractIn this paper, the need for teaching PLC and the elevator is introduced by the PLC control model of self-designed four-storey elevator composition, design, programming methods and procedures. Model of the elevator control system design using PLC described the hope that through the application of practical teaching, gain valuable experience in teaching has good practical value.This design is the design of numerical control table, the control system consists of computer parts, keyboard, LED, I / O interfaces, optical coupling circuit, stepping motor, electromagnet power amplifier circuit and other components. System control part of the use of hardware and software combination designed. The design system is based on powerful AT89S51 microcontroller core, accompanied by the necessary sensing devices, in both X and Y direction of a stepper motor, stepping motor used to make it run shot by three-phase six-run, and by writing assembler, can achieve a variety of complex control, so according to predetermined operating rules and procedures, the control signals control the speed of the stepper motor, stepper motor used to drive transmission parts to control the operation CNC table speed and time, LED for the display system for real-time display table in the running direction. In order to achieve system design requirements and to achieve the basic functions of the CNC table.Keywords:Elevator Model, PLC control, programming目录设计说明书题目:基于PLC的电梯运行控制模拟实验教学系统---------- 控制策略及主程序设计姓名:赵盈盈班级:07机械电子工程学号:0704105116指导教师:叶军所在院系:机械工程学院完成日期:2011年6月5日答辩日期:2011年6月10日0 引言随着城市建设的不断发展,楼群建筑不断增多,电梯在当今社会的生活中有着广泛的应用。
电梯作为楼群建筑中垂直运行的交通工具已与人们的日常生活密不可分。
电梯实际上是一个人机交互式的控制系统,单纯用顺序控制或逻辑控制是不能满足控制要求的,因此,大部分电梯控制系统都采用随机逻辑方式控制。
目前电梯的控制普遍采用了两种方式,一是采用微机作为信号控制单元,完成电梯信号的采集、运行状态和功能的设定,实现电梯的自动调度和集选运行功能,拖动控制则由变频器来完成;第二种控制方式用可编程控制器(PLC)取代微机实现信号集选控制。
从控制方式和性能上来说,这两种方法并没有太大的区别。
国内厂家大多选择第二种方式,其原因在于生产规模较小,自己设计和制造微机控制装置成本较高;而PLC可靠性高,程序设计方便灵活,抗干扰能力强、运行稳定、可靠性高等特点,所以现在的电梯控制系统广泛采用可编程控制器(PLC)来实现。
1 四层电梯模型结合教学的需要,我们研发设计了四层电梯模型,该电梯模型基本上反映了电梯的结构和使用功能,效果直观,可操作性好;选用功能较强的PLC 作为控制单元,符合我国当前中低速电梯控制系统的实际情况。
同时,该模型为电梯技术教学提供了较理想的实验平台,使用者可以直观地验证其程序编辑的正确性,便于理解电梯控制的逻辑关系。
2 可编程序控制器(PLC )可编程序控制器为(Program m able Logic Controller,简称PLC),是在继电顺序控制基础上发展起来的以微处理器为核心的通用自动控制装置。
国际电工委员会(IEC)对PLC 的定义是:可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用可编程序的存贮器,用来在其内部存贮执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字的、模拟的输入和输出,控制各种类型的机械或生产过程。
可编程序控制器及其有关设备,都应按易于与工业控制系统形成一个整体,易于扩充其功能的原则设计。
PLC 具有可靠性高、适应面广、抗干扰能力强、编程方便、对环境要求低、与其他装置配置连接方便等特点。
在工业自动化控制系统中占有极其重要的地位。
3 四层电梯模型 PLC 控制系统的设计3.1 设计目的①实现电梯运行的自动控制;②制作、完善教学教具;③加强教师教学教研水平;④更好的为教学服务。
3.2 设计要求3.2.1 电梯上行设计要求:①当电梯停于 1f 或 2f,3f 呼叫时,则上行,到 3f 的行程开关控制停止,同时,轿厢门与厅门打开3 秒后,轿厢门与厅门关闭;②当电梯停于 1f,2f呼叫,则上行,到2f 的行程开关控制停止,同时,轿厢门与厅门打开,3秒后,轿厢门与厅门关闭;③当电梯停于 1f,2f,3f 同时呼叫,电梯上行到 2f,行程开关控制停止,同时,轿厢门与厅门打开,3秒后,轿厢门与厅门关闭,继续上行到 3f 行程开关控制停止;④当电梯停于 1f,3f,4f 同时呼叫时,电梯上行到 3f,行程开关控制停止,同时,轿厢门与厅门打开,3秒后,轿厢门与厅门关闭,继续上行到 4f 行程开关控制停止;⑤当电梯停于 1f,2f,4f 同时呼叫时,电梯上行到 2f,行程开关控制停止,同时,轿厢门与厅门打开,3秒后,轿厢门与厅门关闭,继续上行到 4f 行程开关控制停止;⑥当电梯停于 1f,2f,3f,4f 同时呼叫时,电梯上行到2f,行程开关控制停止,同时,轿厢门与厅门打开,3秒后,轿厢门与厅门关闭,继续上行到 3f,行程开关控制停止,同时,轿厢门与厅门打开,3秒后,轿厢门与厅门关闭,继续上行到 4f 行程开关控制停止;⑦电梯停于 2f,3f和 4f 同时呼叫,电梯上行到 3f,行程开关控制停止,同时,轿厢门与厅门打开,3秒后,轿厢门与厅门关闭,继续上行到 4f 行程开关控制停止;⑧当电梯停于 1f 或2f 或 3f 时,4f呼叫,则上行到 4f 行程开关控制后停止,同时,轿厢门与厅门打开, 3 秒后,轿厢门与厅门关闭。
电磁机构的工作原理电磁机构由铁心(衔铁)、静铁心和电磁线圈三部分组成,其作用是将电磁能转化成机械能,产生电磁吸力带动触头动作。
衔铁和动触点相连,当电磁线圈通电时产生磁场,使衔铁和静铁心磁化,并且相互吸引。
衔铁带动动触点动作,使触点闭合接通电路。
电磁线圈断电后,磁场消失,磁力也随之消失,这时在复位弹簧的作用下,衔铁复位,带动动触点与静触点分开,电路断开。
在触头断开的瞬间应采取措施迅速灭弧,由于继电器用于控制电路,所以电路比较小,不需要灭弧装置。
由于1绪论1.1研究背景PLC 是一种专门用于工业控制的计算机,早期的PLC是用来替代继电器、接触器控制的。
它主要用于顺序控制,只能实现逻辑运算。
因此,被称为可编程逻辑控制器(Programmable logic controller,略写 PLC )随着电子技术、计算机技术的迅速发展,可编程控制器的功能已远远超出了顺序控制的范围。
被称为可编程控制器(Programmable controller,略写PC)。
为区别于Personal Computer (PC),故沿用PLC 这个略写。
PLC的优点:1. 抗干扰、可靠性高。
2. 模块化组合式结构,使用灵活方便。
3. 编程简单,便于普及。
4. 可进行在线修改。
5. 网络通讯功能,便于实现分散式测控系统。
6. 与传统的控制方式比较,线路简单。