(完整word版)电梯设计计算书
(完整word版)毕业设计三层电梯PLC控制系统设计
摘要随着科学技术和社会经济的发展,高层建筑已成为现代城市的标志。
电梯作为垂直运输工具,承载着大量的人流和物流的输送,在建筑物中起着至关重要的作用。
采用可编程控制器对电梯进行控制,通过合理的选择和设计,能够有效地提高电梯的控制水平,使电梯的控制达到比较理想的控制效果。
本文设计一个三层电梯控制系统,基于西门子S7-200PLC实现。
在介绍电梯结构的基础上,重点分析了三层电梯的控制要求以及电梯控制系统设计中如何用PLC实现控制系统,编制梯形图,并完成程序的调试,利用QSPLC-III型实验装置的电梯模块对三层电梯控制系统进行仿真实验。
关键词:电梯西门子可编程控制器调试仿真实验AbstractWith the development of science and technology and social economy development,high-rise buildings have become the hallmark of modern cities.As a vertical transportation equipment,a lot of people bear the transportantion and logistics,its role a very important part in building . Using Programmable Controller to cntrol the elevater .can improve the reliability and enable the elevator control to achieve an ideal effect, through the reasonable selection and design.So the effect of control is more ideal.This paper use Siemens S7-200 PLC to design a 3-storied elevator control system.Based on the introduction of the elevater's basic structure,expatiates the control request of elevator and analyzes how to use the PLC to program controlling process,edit ladder diagram and debug the program,And use the elvator module on QSPLC-III experimental equipment to do simulation experiment.Keywords:Elevator Siemens PLC Debug simulation experiment目录第1章绪论 01.1 设计背景 01.2 PLC在电梯控制系统中的重要意义 01.3 电梯技术发展前景 (1)1.4 论文的主要内容 (2)第2章电梯控制系统概述 (3)2.1 电梯的起源与发展 (3)2.2 电梯的结构和组成 (4)2.3 电梯的保护装置 (6)2.4 电梯的工作原理 (6)第3章PLC简介 (7)3.1 PLC的产生与发展 (7)3.2 PLC的用途及特点 (10)3.3 PLC的硬件组成 (12)3.4 PLC的工作原理 (14)第4章控制系统总体设计 (16)4.1 控制要求分析 (16)4.2 硬件设计 (16)4.3 软件设计 (21)第5章控制系统仿真 (29)5.1 编程软件简介 (29)5.2 实验装置简介 (31)5.3 程序的编辑 (34)5.4 程序的调试 (34)5.5 控制系统仿真 (35)结论 (37)致谢 (38)参考文献 (39)第1章绪论1.1 设计背景随着科学技术的迅猛发展、城市现代化的突飞猛进,电梯作为一种高效、迅捷、安全、可靠的垂直运输设备,成为人们不可缺少的运输工具。
(完整word版)四层电梯PLC控制设计..
可编程控制器应用实训报告四层电梯控制1、四层电梯控制功能要求采用PLC 构成四层简易电梯电气控制。
电梯的上、下行由一台电动机拖动,电动机正转为电梯上升,反转为下降。
一层有上升呼叫按钮和指示灯,二层又上层呼叫按钮和指示灯以及下降呼叫按钮和指示灯,三层又上升呼叫按钮和指示灯以及下降呼叫按钮和指示灯,四层有下降呼叫按钮和指示灯;电梯开门和关门按钮,关门限位由行程开关检测。
⒈ 开始时,电梯处于任意一层。
⒉ 当有外呼梯信号到来时,轿厢响应该呼梯信号,到达该楼层并停止运行,轿厢门打开,延时3s 后自动关门。
⒊ 当有内呼梯信号到来时,轿厢响应该呼梯信号,到达该楼层并停止运行,轿厢门打开,延时3s 后自动关门。
⒋ 轿厢运行(轿厢上升或下降)过程中,任何反方向的外呼梯信号均不响应。
但如果反向外呼梯信号前方再无其它内外呼梯信号时,则电梯响应该外呼梯信号。
⒌ 电梯应具有最远反向外呼梯响应功能。
⒍ 电梯未平层或运行时,开门按钮和关门按钮均不起作用。
电梯平层或轿厢停止运行时,按开门按钮则轿厢门打开,按关门按钮则轿厢门关闭。
2、电器元件选型及其计算设计要求:电梯可载重12人即1000kg 、电梯自重1000kg 、电梯上下行速v=0.5m/s 。
可求的:总载重mg=2000kg 。
kw v p 105.0*10*2000mg ===有功.设电动机效率%90=η.P=有功p /η=10kw/0.9=11kw.取额定电压V U N 380=.功率因数85.0cos =ϕ.则有A COS U P I N N 2085.0*380*3110003===ϕ。
然后根据此电机的额定电流选出继电器、熔断器和热继电器等数据。
(1) 熔断器额定电流约为电机额定电流的1.8-2.1倍; (2) 断路器额定电流约为电机额定电流的1.5倍;(3) 热继电器的额定电流约为电机额定电流的0.95-1.05倍; (4) 固体中间继电器的额定电流约为电机额定电流的6-7倍; (5) 交流接触器额定电流约为电机额定电流的2.5倍;(6) 铜芯电线一般为每平方毫米载流量4-6A 之间,线路长时取小值,线路短时取大值。
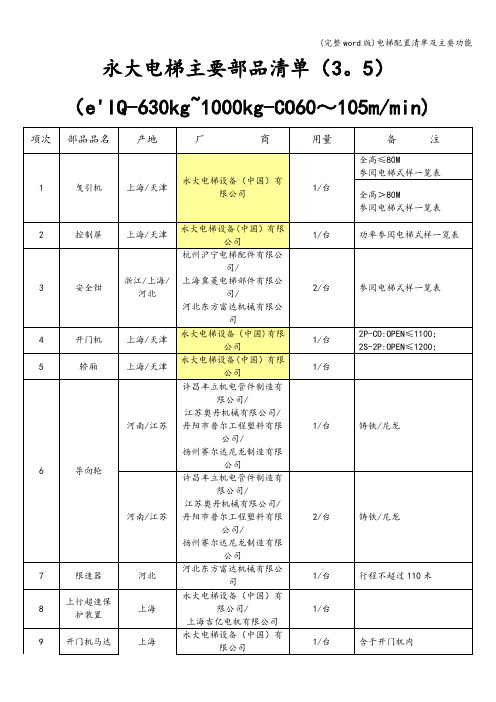
(完整word版)电梯配置清单及主要功能
对重侧
浙江/江苏/天津
苏州欣科导轨有限公司 /
杭州三杭蒙特费罗电梯部件有限公司/
苏州塞维拉上吴电梯轨道系统有限公司/ 天津塞维拉电梯轨道系统有限公司
依楼高而定
轿厢侧
11
轿门导轨
江苏/上海
吴江华鑫电梯有限公司/ 上海精润金属制品有限公司/ 丹阳合辉机械有限公司
1/停
12
层门吊板
浙江/上海/天津
2N+1/台
上海吉电代理
N:实际楼停数
全球采购
Texas Instruments Incorporated
(美国T.I)
2N+1/台
上海吉电代理
N:实际楼停数
66
RCTT
日本
富士电机电子技术株式会社
1/台
上海吉电代理
含于控制柜内
永大电梯进口部件明细表
NO
部 品 名 称
品牌厂商
进口地区
备 注
一、控制屏控制系统
01
主钢丝绳
东京制钢/帝国钢缆/
台湾松和
全球采购
1000kG,60m/min之人乘梯、
观光梯除外;
02
轴承
日本/NSK
日本
03
旋转编码器(ROTARY ENCODER)
日本/多摩川
全球采购
三、轿顶控制系统
01
计算机处理器芯片
台湾/华邦
全球采购
02
电源组
美国/NS
全球采购
四、变频门机
01
旋转编码器 (ROTARY ENCODER)
06
电流互感器
日本/LEM
日本
马达额定功率≤22kW时用;
载货电梯(5000Kg)设计计算书4.5米
THF5000/0.5-JXW-VVVF目录一井道顶层净高及底坑尺寸二电梯主要参数三传动系统1.电动机功率计算2.曳引机主要参数3.选用校准四曳引绳安全计算五悬挂绳轮直径与绳径比值计算六曳引条件计算七比压计算八正常工况下导轨应力,变形计算九安全钳动作时,导轨应力计算十轿厢架计算十一缓冲的校核十二限速的校核十三安全钳的校核十四轿厢通风面积和轿厢面积计算十五承重大梁的校核十六底坑地板受力的计算一 井道顶层净高及底坑尺寸井道顶层净高4500mm 及底坑尺寸1700mm 缓冲器安全距离200mm ~350mm 取300mm 提升高度4.5m1. 井道顶层空间计算:单位(mm)OH=H+H1+H2+H3+35V2OH=2450+300+175+1000+35x0.52OH=3664<4500mm所以井道顶层净高4500mm 满足要求。
OH-顶层高度 H-轿厢高(2500mm) H1-安全距离(300mm) H2-缓冲距离175mm V-速度(0.5米/秒)H3-轿厢投影部分与井道顶最底部分的水平面之间的自由垂直距离(1000+35V 2mm)2.井道底坑空间计算:单位(mm)P=L1+H1+H2+L3P=650+300+175+500P=1625<1700mm所以井道底坑深度1700mm满足要求。
P-底坑深度 L1-轿底与安全钳拉杆距离(650mm)H1-安全距离(300mm) H2-缓冲距离(175mm)L3-底坑底与轿厢最底部件之间的自由垂直距离(500mm)二电梯的主要参数1.电梯主要技术参数:(1) 额定速度: V=0.5m/s(2) 额定载重量: Q=5000㎏(3) 轿厢自重: G=3500㎏(4) 曳引比: i1=2:1(5) 曳引轮直径: D=Ф760mm(6) 电梯传动总效率: η=0.80(7) 钢丝绳直径‵根数: d.Z=Ф16mmx6(根)(8) 电梯平衡系数: Ψ=0.40~0.5(设0.45)(9) 电梯提升高度: H=4.5m(10) 补偿链直径‵根数: d1.Z=Ф16×1(11) 曳引绳提升高度总重量: G1=q1ZHi1=0.939x6x4.5x2=50.706㎏(12) 平衡补偿链重量: G2= q2ZH=6.65×4.5×1=29.925㎏(13) 电缆重量: G3= q3H=1.02x4.5÷2=2.925㎏(14) 对重重量: W= G+KQ=3500+0.45x5000=5750㎏三、传动系统1.电动机功率的计算N=QV(1-Ψ)/102η式中:N-功率V-曳引轮节径线速度(m/s)Ψ-电梯平衡系数η-电梯机械传动总效率∴N=5000×0.5(1-0.45)/(102×0.80)=16.825Kw 选用电动机功率为22 Kw2.曳引机的主要参数选用宁波欣达产品型号:YJ336A-III曳引机自重:1450㎏主轴最大静态载荷:9000㎏电动机功率:22Kw电动机转速:976r/min曳引轮直径: Ф760mm曳引钢丝绳:6×Ф16 mm减速比:75:23.选用校核(1)主轴最大静载载荷校核Σp=(G+G1+G2+G3+W+Q)/i1Σp=(3500+50.706+0+2.925+5750+5000)/2Σp=7152㎏则Σpk=KΣp=1.1×7152=7867㎏<9000㎏其中:G为轿厢以额定载重量停靠在最低层站时,曳引轮水平面上轿厢一侧的曳引轮的静拉力。
(完整word版)电梯结构原理及控制系统(DOC)
第一章绪论随着城市建设的不断发展,高层建筑不断增多,电梯在国民经济和生活中有着广泛的应用。
电梯作为高层建筑中垂直运行的交通工具已与人们的日常生活密不可分。
实际上电梯是根据外部呼叫信号以及自身控制规律等运行的,而呼叫是随机的,电梯实际上是一个人机交互式的控制系统,单纯用顺序控制或逻辑控制是不能满足控制要求的,因此,电梯控制系统采用随机逻辑方式控制。
目前电梯的控制普遍采用了两种方式,一是采用微机作为信号控制单元,完成电梯信号的采集、运行状态和功能的设定,实现电梯的自动调度和集选运行功能,拖动控制则由变频器来完成;第二种控制方式用可编程控制器(PLC)取代微机实现信号集选控制。
从控制方式和性能上来说,这两种方法并没有太大的区别。
国内厂家大多选择第二种方式,其原因在于生产规模较小,自己设计和制造微机控制装置成本较高;而PLC可靠性高,程序设计方便灵活,抗干扰能力强、运行稳定可靠等特点,所以现在的电梯控制系统广泛采用可编程控制器来实现。
电梯是将机械原理应用、电气技术、微处理器技术、系统工程学、人体工程学及空气动力学等多学科和技术集于一体的机电设备,它是建筑物中的永久性垂直交通工具。
为满足和提高人们的生活质量,电梯的智能化、自动化技术迅速发展.特别是随着计算机网络技术、微电子和电力电子技术的飞速发展,现代电梯的技术含量日益提高。
在改善电梯性能的同时,对电梯的设计、管理和维护人员提出了更高的要求。
第二章电梯的结构2。
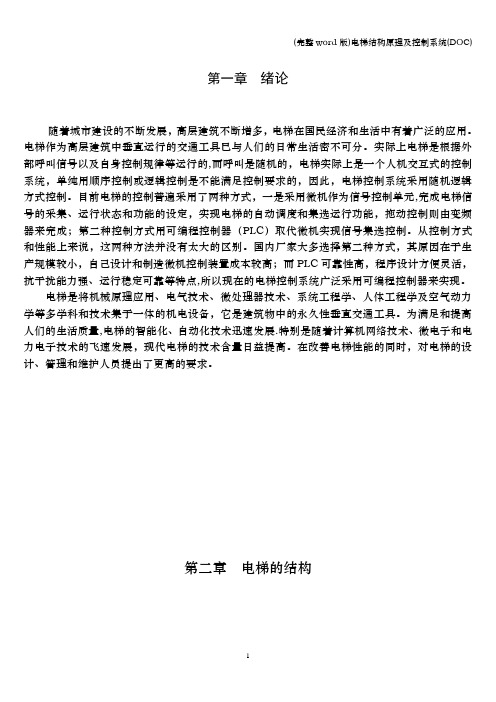
1 电梯的基本结构电梯是机与电紧密结合的复杂产品,是垂直交通运输工具中使用最普遍的一种电梯,其基本组成包括机械部份和电气部份,结构包括四大空间(机房部分、井道和底坑部分、围壁部分和层站部分)和八大系统(曳引系统、导向系统、门系统、轿厢、重量平衡系统、电力拖动系统、电气控制系统、安全保护系统)组成。
电梯基本结构如图2—1所示:1-减速箱;2-曳引轮;3-曳引机底座;4—导向轮;5-限速器;6—机座;7—导轨支架;8—曳引钢丝绳;9—开关碰铁;10-紧急终端开关;11—导靴;12-轿架;13-轿门;14-安全钳;15-导轨;16—绳头组合;电梯的基本结构剖视图17-对重,18-补偿链;19—补偿链导轮; 20-张紧装置;21—缓冲器;22-底坑;23—层门;24—呼梯盒;25—层楼指示灯;26—随行电缆;27-轿壁;28—轿内操纵箱; 29-开门机;30-井道传感器; 31—电源开关;32-控制柜;33—曳引电机;34-制动器图2—12.1.1 机房部分机房用来安装曳引机、电控屏、限速器等。
(完整word版)基于PLC的五层电梯控制系统设计任务书

3、多层电梯实验装置一台及其配套设施
4、电梯控制变频器
进度安排:
第一阶段:下达任务,熟悉要求,查找资料 1-4周
第二阶段:熟悉硬件连接装置及其掌握原理图。5-7周
第三阶段:编写软件,进行计算机仿真与程序下载调试。8-13周
第四阶段:撰写论文 。 14-15周
附件2
南 阳 理 工 学 院
毕业设计(论文)任务书
电子与电气工程系电气工程及其自动化专业109741班学生 来红雨学号104091120033
指导教师尹应鹏职称讲师
一、毕业设计(论文)题目:基于PLC的五层电梯控制系统设计
二、毕业设计(论文)工作规定进行的日期:2011年12月21日起至2012年5月14日止
[5]郑学伟.基于PLC的电梯控制系统[D].天津:天津大学硕士论文,2006.
[6]程玉华.西门子S7—200工程应用实例分析[M].北京:电子工业出版社.2008.
英文资料翻译及其它要求:
要求学生能翻译3000字左右的导签名:
年月日
学生签名:
2)下降的最终目标层不一定是底层,应是有人想进电梯或想出电梯的最低层;
3)电梯下降的过程中,不理睬途径呼叫楼层的厢外上行按钮。
6、如果没有任何呼叫指示和目标,那么电梯无目标,暂停运行。
7、超载开关:当超载时轿底下降开关动作,电梯不能关门和运行,并发出报警信号,相应的指示灯亮起。
原始数据与资料:
1、高性能电脑一台;
系统结构框图
要设计实现的的基于PLC五层电梯模型控制系统设计性能指标如下:
1、PLC上电时,电梯来到一层作为起始点;
2、电梯在上、下运行过程中,不允许开门,电梯到达目标层且停稳后才允许对门进行操作;
(完整word版)电梯安装、(作业指导书)
吉林省西继迅达电梯工程有限公司电梯安装作业指导书使用岗位:安装2015—05—01发布2015—05—01实施目录一、安装前工作准备及开箱点件 (2)二、制作样板和井道放线 (3)三、安装导轨及调整 (4)四、安装地坎、门框及门套 (6)五、安装并调整厅门 (6)六、安装机房设备 (7)七、安装井道线槽及布线 (8)八、安装轿架、对重架及地坑设备润滑 (8)九、安装曳引钢丝绳和限速器绳 (9)十、拼装轿厢和安装轿顶设备及布线 (10)十一、安装随行电缆和保护装置 (12)十二、慢车调试及感应板、补偿链等安装 (12)十三、快车调试 (13)十四、清理工地、验收移交 (13)一、安装前工作准备及开箱点件1、当我们进入工地以后,第一要作的事就是检查仓。
仓库的门、照明等。
这些防盗和保护措施必须在开箱以前做好。
施工工地是一个人员比较复杂的场所,当材料或工具被盗或被损坏时,都将给安装工作造成很大的困难。
2、搭货架:搭好货架,将部件分门别类放置.2。
1便于清点,搭好以后每档都用标签写上材料的名称、用途,箱子开好后以便核对。
做到有条不紊、一目了然。
2。
2能更好地利用仓库,想空间要地方。
在仓库面积紧张时,这是唯一的好办法.2.3便于管理。
避免在无意当中碰坏电梯零部件。
2。
4便于取材料。
不管是老师傅还是小徒弟都会带来方便。
老师傅节省时间,小徒弟在取材料时能进一步地对电梯零部件的认识.2.5便于现场管理.先装部件放在易取到的地方,后装的部件放在里面.2。
6美观3、开箱3.1先熟悉箱单,对每个箱内所装何物心里有数。
3。
2熟悉合同附件,了解电梯的详细规格和产地。
3.3了解电梯布置图3。
4打开箱子,按照箱单对箱内的材料逐一加以清点,查清它的缺损。
把所有箱子开好以后,再全面核对一次,并填写现场开箱报告.3。
5有些材料箱单内未反映出来,但在我们安装时必须装的,也要在报告上填好,并注明原因。
开箱时最重要当心的就是铁钉和快口。
在搬运及存放时应注意方法,以免造成损坏及零部件砸伤手脚。
(完整word版)基于单片机控制的电梯控制系统
单片机综合实验实验报告学院计算机与电子信息学院专业电子信息工程班级电信11- 班姓名学号110340301实验题目基于单片机控制的电梯控制器系统环境Proteus 指导教师左敬龙实验时间2013年10月28日至2013年11月01日实验报告评分:_______题目:基于单片机控制的电梯控制器班级:电信11- 姓名:摘要:单片机即单片微型计算机(Single-Chip Microcomputer ),是集CPU ,RAM ,ROM ,定时,计数和多种接口于一体的微控制器。
本设计介绍了基于单片机的电梯控制系统,硬件部分主要由单片机最小系统模块、电梯内外电路按键矩阵模拟检测模块、电梯外请求发光管显示模块、楼层显示数码管模块、电梯上下运行显示模块等5部分组成。
该系统采用单片机(AT89S52)作为控制核心,内外使用按键按下与否而引起的电平的改变,作为用户请求信息发送到单片机,通过单片机来控制电机的正反转,并且根据楼层检测结果控制电机停在目标楼层。
软件部分则使用C语言,利用查询方式来检测用户请求的按键信息,根据电梯运行到相应楼层时,模拟按键引起电平变化,送到单片机计数来确定楼层数,并送到数码管进行显示。
硬件设计简单可靠,结合软件,基本实现了六层电梯运行的模拟。
关键词:单片机,AT89S52,电梯,控制器。
1 引言随着生活节奏的加快以及生活环境的不断改变,高楼大厦中电梯的应用也越来越普及,而如何有效地使用电梯,是其能够智能化的稳定工作已经成为焦点。
从而,电梯便是高层住宅、商店、宾馆、写字楼、仓库等高层建筑不可缺少的垂直方向的运输工具。
然而,1889年美国奥梯斯升降机公司推出的世界第一部以电动机为动力的升降机,同年的纽约市马累特大夏安装成功。
随着建筑物规模的不断扩展,楼层也越来越高,对电梯的调速精度、调速范围等静态和动态特性也随之提出更高的要求。
由于传统的电梯运行逻辑控制系统采用的是继电器逻辑控制线路。
采用这种控制线路存在易出故障、维护不便、运行寿命较短、占用空间大等缺点。
高层建筑双笼施工电梯施工方案WORD可编辑版.【完整版】
高层建筑双笼施工电梯施工方案WORD可编辑版.【完整版】(文档可以直接使用,也可根据实际需要修订后使用,可编辑放心下载)施工电梯专项施工方案工程名称:工程地点:施工单位:编制单位:编制人:编制日期:审核人:审核日期:批准人:批准日期:目录一、工程概况 (3)二、安装前的准备工作 (3)三、安装定位 (5)四、根底设计及基底支撑设计 (5)五、附墙设计及验算 (6)六、安装与拆卸程序 (12)七、安装重点考前须知 (16)八、安装平安要求 (17)九、层门安装 (17)十、电梯检验及调试运行 (17)十一、施工电梯使用前考前须知 (19)十二、施工电梯平安操作规程 (19)十二、维护与保养 (20)一、工程概况本工程位于河源市新市区****大道南面****大道西边,建筑高度87.2m,地下室层高4.5m,板厚为0.25m,地下室顶板的混凝土强度等级为C40。
根据施工部署方案要求,安装一台型号为SC200/200双笼施工电梯,安装高度90m,解决施工过程中人员上下及材料的垂直运输问题。
本工程SC200/200型施工电梯由佛山市南海区聚龙建设机械生产,各项技术指标合格。
主要技术参数二、安装前的准备工作1、电梯安装前必须先做好各项准备工作。
主要有以下几点:1〕、根底设在地下室的顶板上,按支承图准备钢管及扣件等加固材料。
由于地下室的顶板所在梁的位置及承荷与施工电梯根底承载力实际不符。
因此顶板下〔地下室〕要支撑钢管加固。
2〕、在地下室顶板上按照说明书要求将根底尺寸放样,待钢筋安装后,将根底预埋件严格按照说明书要求安装位置上并加以固定(防止浇砼时移位)。
预埋件的上平面与砼根底上平面一致。
3〕、按设备技术要求,对传动机构及制动局部进行检查,加注润滑油脂。
对钢结构锈蚀部位,作好防锈工作。
对有破皮的电缆进行处理或更换。
4〕、清理现场,部件总成或机件进场。
5〕、部件总成进场或安装,利用现场在用塔吊。
6〕、在施工区域内,要有独立电源,确保电压在380±5%范围内。
电梯全套资料完整版本
-电梯全套资料目录1特别注明:每一项前面加一页“报验申请表”目录2报验申请表工程名称:长城花园二期编号:131220001电梯安装工程分部(子分部)工程验收记录(GB50300-2001)表F.0.1 编号:报验申请表电力驱动的曳引式或强制式电梯分部(子分部)工程验收记录(GB50300-2001)表F.0.1 编号:报验申请表设备进场验收分项工程质量验收记录表(GB50300-2001)表E.0.1 编号:设备进场检验批质量验收记录(GB50310-2002)表 4.1、5.1 编号:131220001报验申请表工程名称:长城花园二期编号:131220001土建交接检验分项工程质量验收记录表(GB50300-2001)表E.0.1 编号:土建交接检验批质量验收记录(GB50310-2002)表4.2 编号:031220001报验申请表工程名称:长城花园二期编号:131220001驱动主机分项工程质量验收记录表(GB50300-2001)表E.0.1 编号:驱动主机检验批质量验收记录(GB50310-2002)表 4.3 编号:131220001报验申请表工程名称:长城花园二期编号:131220001导轨分项工程质量验收记录表(GB50300-2001)表E.0.1 编号:导轨检验批质量验收记录(GB50310-2002)表 4.4 编号:131220001报验申请表工程名称:长城花园二期编号:131220001门系统分项工程质量验收记录表(GB50300-2001)表E.0.1 编号:门系统检验批质量验收记录(GB50310-2002)表 4.5 编号:报验申请表工程名称:长城花园二期编号:131220001轿厢、对重(平衡重)分项工程质量验收记录表(GB50300-2001)表E.0.1轿轿厢、对重(平衡重)检验批质量验收记录(GB50310-2002)表4.6(4.7)编号:报验申请表安全部件分项工程质量验收记录表(GB50300-2001)表E.0.1 编号:安全部件检验批质量验收记录(GB50310-2002)表 4.8 编号:131220001报验申请表工程名称:长城花园二期编号:131220001悬挂装置、随行电缆、补偿装置分项工程质量验收记录表(GB50300-2001)表E.0.1 编号:悬挂装置、随行电缆、补偿装置检验批质量验收记录(GB50310-2002)表4.9 编号:131220001报验申请表电气装置分项工程质量验收记录表(GB50300-2001)表E.0.1 编号:电气装置检验批质量验收记录(GB50310-2002)表 4.10 编号:131220001报验申请表工程名称:长城花园二期编号:131220001整机安装验收分项工程质量验收记录表(GB50300-2001)表E.0.1 编号:整机安装检验批质量验收记录(GB50310-2002)表4.11 编号:131220001报验申请表工程名称:长城花园二期开箱检验记录报验申请表工程名称:长城花园二期隐蔽工程检查验收记录报验申请表电梯电气接地电阻测试记录报验申请表。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算者:总经理:ZFTG1600/3.0-JX(VVVF)乘客电梯设计计算说明ZFTG1600/3.0-JX(VVVF)绿色节能永磁同步无齿轮电梯,是经国家特种设备管理局批准研制的通过引进国外先进技术,经过消化吸收后,采用优化设计而成,具有国内先进水平。
有加减速度曲线圆滑、乘座电梯舒适感好、运行平稳、速度快噪音低、环保节能等优点。
我们的电梯采用日本富士电机公司出产的电梯专用变频器:LEFT型,功率37KW。
控制系统采用32位微机控制,主要控制原器件选用日本富士电机公司(FUJI ERECTRIC)的产品。
轿厢是用板式压制的结构件,强度高、刚性好、美观大方。
而安全件则选用经国家认可的检验所检验为合格的产品,如安全钳、限速器、门锁、缓冲器、上行保护装置等。
设计的ZFTG1600/3.0-JXW(VVVF)乘客电梯特性如下。
1. 该款电梯的最大特点是:节约能原、每年可为用户节省约100天的电费,每台比传统电梯节省30%的电能。
是一款以绿色节能为核心的全电脑模块化控制永磁同步无齿轮电梯。
无齿轮曳引机与有齿轮曳引机的区别在于:有齿轮曳引机的传动的方式是电动机将动力通过齿轮变速箱传动到曳引轮;而无齿轮曳引机则在设计上省略了齿轮变速箱,其传动方式是由电动机直接带动曳引轮,避免了传动过程的机械磨损和能耗。
另一方面和传统的感应电动机相比,永磁电动机无需耗费电能来产生励磁,因而进一步节省了电能。
永磁无齿轮曳引机具有振动小的效果,闭环的门操作系统,开关门动作平稳。
结构合理,体积小巧,重量较轻,降低了电梯对建筑结构的要求,节省了建筑的空间。
先进的技术则代表着更卓越的性能,零件少意味着成本的降低,。
珠江富士在继续秉承其电梯产品安全,可靠和耐用的同时,在产品开发中应用价值工程,降低了电梯系统的成本,并将这一成果回馈给用户。
更高的性价比,给客户带来实实在在的利益。
在社会不断进步的今天“以人为本”的理念熔入产品设计中,产品安全可靠、乘座舒适,门光幕保护以及盲文呼梯按钮大大方便了特殊人群。
电梯润滑存在油污问题。
永磁无齿曳引机无需润滑避免油垢对环境的污染。
电梯系统机械性能优越。
运行平稳,舒适和安静,无噪声污染。
2.采用调频、调压、调速微电脑控制的电梯,以控制电压以及周波数作连续性变化的新型方式,按照现代社会的需要和人体的生理适应需求,运用优化设计而适应人体在运行中所要的舒适感。
求得理想运行优化曲线:平稳、无噪音。
平层精度在±3mm之内,确保运行安全性,保证了人民的生命安全。
3.提高电梯运行速度:电梯的运行速度提高,加快了房屋的高层化,可达到30层楼以上。
该电梯己进入高速度电梯挡内。
4.安全性好,运行故障率低。
微机采用了故障报警系统,如在关键点出了故障,微机会以灯光或声响提醒维修人员事故发生在什么部位。
5.控制系统功能:1)楼层设定点阵显示2)电梯运行状态自动显示3)自动呼梯、开关门、无人驾驶;4)自动平层;5)自动回归主定楼层;6)满载、超载报警,停运;7)清除扰乱呼叫;8)到站钟;9)警铃;10)消防运行;11)紧急停止;12)检修慢车;13)照明、风扇自动熄灭装置;14)故障自动侦测报值;15)多台电梯群控;16)停电自动疏散装置;17)停电自动照明装置;18)轿内电话;6.安全系统功能:1)电路断路器(漏电保护、断相保护)2)限速器,安全钳当轿厢运行速度超过额定速度15%时:限速器电器开关首先作用——将控制电源切断,停止主机运行。
随后,限速器机械部份将限速器的钢丝绳制停,带动安全钳拉杆动作,楔块将轿厢制停在导轨上,保证了轿厢内的物品和人员安全。
3)门锁开关,层门门锁.防止电梯在整个运行中开门:电梯运行在平层区内才能将该层门打开,门锁是由轿门的门刀控制。
4)电磁制动器在电机主轴上是电梯动力系统曳引机上的制停部件:电梯停运时不能滑动轿厢,电磁制动器失电时在机械力的作用下,抱紧曳引机主轴,控制了轿厢滑动。
是GB7588-2003标准中规定的上行保护装置。
5)安全触板检查在关门过程中是否有物体或乘客:当有物体或人员在门口时,安全触板不能复位开关,光幕中有障碍物、层门再次开起。
电梯不能起动。
安全触板有机械式、光电式、电磁式等。
6)缓冲器在轿厢、对重超越最底层时。
缓冲器可以减轻强烈撞底时的强烈振荡,确保轿厢、对重安全停止。
7)称重装置轿厢在设计时有额定重量:在物流和人流过程中,时常存在超载的情况。
轿厢在超载状态下:一是报警;二是层门保持开启,电梯就无法起动。
8)极限开关组由三个开关组成。
在轿厢运行到最高层或最低层时,首先是减速开关控制,将运行速度减下来。
第二是限位开关,电梯断电停止。
第三是极限开关,特殊情况下,电梯还在运行,极限开关作用:全面停止运行,最后防线确保安全。
9)紧急出口;在故障、停电情况下,有自动平层或人工平层,开门让乘客离开轿厢,也有安全窗、安全门出口,门一打开,电梯不能再运行。
10)急停开关;轿厢顶、地坑、机房设有急停开关:在紧急情况下可以操作这些开关,停止电梯运行。
随着先进技术的发展,以及对电梯的引用及开发,我公司的电梯产品得到不断的改进和完善,各项技术指标不断提高,性能更加完好。
我们的宗旨:发展民族电梯工业、振兴中华电梯事业、扬智光、融世界电梯精技、创电梯名牌。
编制者:2007年9月1日目录序号-名称-页号乘客电梯设计计算说明…………………………………2页目录………………………………………………………6页1-电梯相关技术参数……………………………………8页2-曳引机容量计算………………………………………9页3-额定转数验算…………………………………………9页4-曳引条件计算……………………………………9~11页4.1-超载125%轿厢在底层上行工况……………………9页4.2-空载轿厢下行工况…………………………………10页4.3-对重压在缓冲器上空载轿厢上行工况……………11页5-曳引绳的强度计算………………………………11~12页5.1-有机房2:1曳引绳吊法计算………………………12页6-制动力矩计算……………………………………12~13页6.1-静力矩:……………………………………………12页6.2-动力矩:……………………………………………12页6.3-总制动力矩…………………………………………13页7-轿厢主导轨计算…………………………………14~16页7.1-主导轨主要技术参数………………………………14页7.2-轿厢运行中安全钳动作时导轨强度计算…………15页7.3-轿厢偏载运行时导轨刚性计算……………………16页8-承重梁强度计算…………………………………16~18页8.1-承重梁计算参数……………………………………16页8.2-受力分折……………………………………………17页8.3-强度计算……………………………………………17页8.4-刚度计算……………………………………………18页9-曳引轮输出扭矩计算……………………………18~19页9.1-有无机房2:1吊法额定扭矩计算…………………18页10-曳引机主抽最大静载荷计算………………………19页11-曳引轮比压计算………………………………………19页12-额定载荷向上手工盘车………………………………19页13-轿架结构件计算…………………………………20~22页13.1-上梁计算……………………………………………20页13.2-下梁计算……………………………………………21页13.3-立梁计算……………………………………………22页14-轿厢面积计算…………………………………………22页15-轿厢通风面积计算……………………………………22页16.-绳头组合强度计算………………………………22~23页17.-导向轮轴强度计算:……………………………23~24页18.-安全钳校验:…………………………………………24页19.-限速器绳计算及限速器校验…………………………25页19.1-限速器绳计算…………………………………………25页19.2-限速器校验……………………………………………25页20.-缓冲器校验……………………………………………26页21-电梯设计许可值和安全系数……………………………27页22-参考文献…………………………………………………28页1. 电梯相关技术参数2.曳引机容量计算: N 电=8.010255.031600102⨯⨯⨯=ηϑνF =32.6kw 选用WYT-Y3.0E1永磁同步无齿曳引机 33.3KW 合格3.额定转数验算: n=48.0236060⨯⨯⨯=ππd vi =238.7r/min 符合要求.4.曳引力计算轿厢装载和紧急制动工况:αf e T T ≤21β=00 r=350 μ=0.1H当量摩擦系数rr r f sin sin 2sin 2cos 4+---⎥⎦⎤⎢⎣⎡-=ββπβμ =[]574.061.00954.01.04+--⨯π=0.1228 α为3050 92.1323.51228.0==⨯ee f α4.1超载125%轿厢在底层上行工况按标准要求:125%载荷运上行钢丝绳在轿厢一则受力比对重一侧大。
T 1=[P+1.25Q+60nq 1]g=[1790+1.25×1600+60×10×0.48]×9.8=39984NT 2=[P+ψQ+60mq 2]g=[1790+0.45×1600+60×2×1.8]×9.8=26754N=21T T 49.12675439984= 99.149.1=≤αf e 符合要求4.2空载轿厢下行工况当轿厢空载下行时,轿厢一侧钢丝绳受力小于对重。
T 1=[P+ψQ+60nq]g=[1790+0.45×1600+60×10×0.48]×9.8=27440NT 2=[P+60mq]g=[1790+60×2×1.8]×9.8=19498N=21T T 4.11949827440= 99.14.1=≤αf e 符合要求4.3对重压在缓冲器上空载轿厢上行工况对重压在缓冲器上、空载轿厢在最上层,对重侧面只有钢丝绳重量与轿厢平衡:T 1=[P + 60mq]g=[1790+60×2×1.8]×9.8=19498 NT 2=60nq ×g=60×10×0.48×9.8=2842N规程要求 αf e T T ≥21 =21T T 86.6284219498= 此时工况的摩擦系数为平常的2倍 μ2=0.2 当量摩擦系数rr r f sin sin 2sin 2cos 4+---⎥⎦⎤⎢⎣⎡-=ββπβμ =[]574.061.00954.02.04+--⨯π=0.24575989.363.5246.0==⨯e e f α989.386.621=≥=αf e T T 此时上行轿厢打滑提不起来。