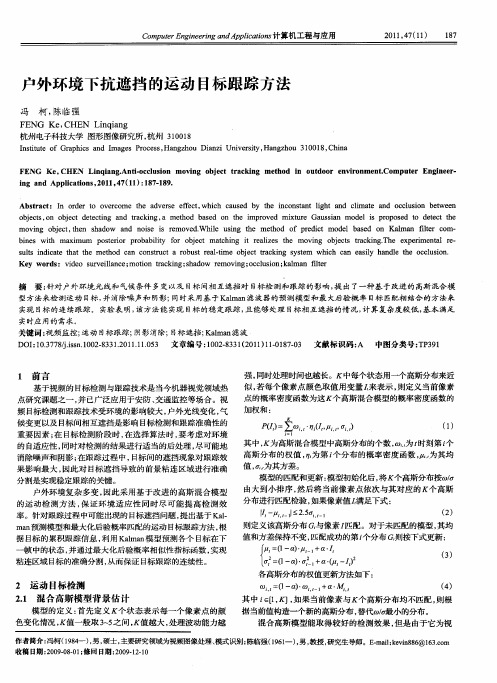
遮挡情况下的图像跟踪方法
适用于多目标之间遮挡问题的跟踪算法

接着用 区域对应判别 五种状态 ; 目 的分裂事件 , 色特 对 标 用颜
征匹配 准则计算相似 度进行二 次跟踪判定 图 1 为程序算 法
流程。
与其在位 置上 有重叠 , 为物体在第 i 帧离开 了场景 。 可认 +1
从上 面的分析 中可 以看 出: 区域 对应 方法 利用运 动物 体
中的运 动物体分成五种状态 : 入场 景、 进 离开场景 、 融合 、 分裂
和一般情 况。对输 入的视频 进行预处 理 以获得 运动 物体块 ;
个或 两个 以上 的框重叠 。 4 进 入场景 : ) 第 +1帧上 的框在第 帧上找不 到一个 框 与其在位 置上有重叠 , 可认 为物体在第 i +1帧进入场景 。 5 离 开场景 : ) 第 帧上的框在第 i 帧上找不到一个框 +1
运动中相互遮挡 、 跟踪 目标 的多样性 、 刚性 目标形态 、 度 非 速
的变化等 都为视频跟踪带来一定的挑战 。
本文 讨论的是单 目静止 摄像机 , 背景 相对静 止条 件下 多
目标跟踪 。针 对这 种应用 , 目前 已提 了许 多跟 踪算 法。它们
预理 处
跟 踪 处理
[ 奁) 萎 覆 丽
法 利用 目标 块的特征匹 配进行跟 踪。这些 特征包 括速 度 、 加
区域 对 应 。 次跟 踪判 定 初
进入场景建l l 离开场景删I I 融合整l分裂计算颜色相 l 1 l 一般情况更
立颜色模型l J 色模型l 除颜 】 体考虑 I 二次跟踪判定l J 似度 J 新颜色模型
显 示跟 踪 结 果 图 1 算法流程
速度 】大 小 、 、 质心位置 和颜色 等 。利 用 目标速 度或加
速度预测进行跟踪 的方法 , 只能处理 目标 的平移运 动 , 一旦交
图像处理中的目标跟踪算法设计与性能评估方法

图像处理中的目标跟踪算法设计与性能评估方法目标跟踪是计算机视觉领域中一项重要的任务,广泛应用于视频监控、智能交通、无人驾驶和增强现实等领域。
目标跟踪算法设计与性能评估是提高跟踪准确性和效率的关键。
本文将介绍图像处理中的目标跟踪算法设计以及常用的性能评估方法。
一、目标跟踪算法设计目标跟踪算法旨在从连续的图像序列中,准确地估计目标的位置和尺度。
以下是几种常见的目标跟踪算法设计方法:1. 基于模板的方法:该方法将目标的初始位置和尺度作为模板,在后续图像中寻找与模板最相似的区域作为目标的位置。
基于模板的方法包括均值漂移、相关滤波器和模板匹配等。
2. 基于特征的方法:该方法通过提取目标的特征信息进行跟踪,常用的特征包括颜色、纹理、形状和运动等。
基于特征的方法包括卡尔曼滤波器、粒子滤波器和深度学习等。
3. 基于超像素的方法:该方法将图像分割成若干个超像素,在跟踪过程中利用超像素的空间关系和相似性来估计目标的位置。
基于超像素的方法包括稀疏表示、分割与跟踪、跟踪与检测等。
二、性能评估方法评估目标跟踪算法的性能是十分重要的,以下是几种常用的性能评估方法:1. 准确性评估:准确性是评估目标跟踪算法的核心指标之一,通常使用重叠率(Overlap Rate)和中心误差(Center Error)来衡量。
重叠率是目标边界与跟踪结果的交集与并集之比,中心误差是目标中心与跟踪结果中心的欧氏距离。
高重叠率和低中心误差表示算法具有较好的准确性。
2. 鲁棒性评估:鲁棒性是评估目标跟踪算法抗干扰能力的指标,常见的鲁棒性评估方法包括光照变化、尺度变化、遮挡和快速运动等。
通过在各种干扰情况下测试算法的跟踪准确性,可以评估算法的鲁棒性。
3. 复杂度评估:复杂度评估是评估目标跟踪算法的计算复杂度和运行速度的指标,常用的复杂度评估方法包括处理帧率、平均处理时间和内存占用等。
较低的复杂度和较快的运行速度表示算法具有较好的效率。
4. 数据集评估:数据集评估是常用的目标跟踪算法性能评估方法之一,目标跟踪领域有许多公开的数据集,如OTB、VOT和LAR等。
图像处理算法5_目标跟踪及遮挡处理算法

基于粒子滤波算法的目标跟踪及遮挡处理算法1.1引言对运动目标物的跟踪也是视觉监控系统中的基础算法之一。
目标跟踪的任务是通过对图像序列的处理,准确估计出感兴趣目标物在每个时刻的运动参数,包括位置、大小、速度、加速度以及运动轨迹等,为行为理解等更高层的任务打下基础。
本章首先概述目标跟踪算法的基本步骤和难点,并对现有算法作分类简介;然后对实现鲁棒跟踪所必需的工具——在线贝叶斯估计算法作详细介绍;在此基础上详细论述本文使用的跟踪方法,该方法将已有的多种先进算法有机结合,使计算量显著降低,鲁棒性增强;最后对提出的算法进行总结和分析。
1.2 目标跟踪算法概述目标跟踪算法主要由两个部分组成:(1)目标物表示;(2)运动状态估计。
下面对它们分别介绍。
1.2.1目标物表示目标物表示的核心在于特征的选择和提取,即用什么特征来描述和表示感兴趣目标物。
一个好的目标物表示方法应该能够将被跟踪的目标物和背景中的物体以及其它物体区别开来,这正是目标物表示的难点所在。
运动目标物所在的环境通常是很杂乱的,其中存在许多与目标物有相似特征的物体。
例如:房间内的窗帘、家具等往往与人的皮肤颜色相近;当监控视野中存在多个行人的时候,跟踪器容易将目标行人与其他行人相混淆。
下面介绍几种常用的特征。
1.2.1.1颜色特征颜色是人类辨识物体的重要特征,也是视觉跟踪中最常用的特征之一。
颜色特征通常是在一块区域中提取出来的,因此它具有对目标平面旋转、非刚性形变、远离或靠近镜头的尺度变化以及部分遮挡等情形较为鲁棒的优点。
另外,由于图像直接由一个个像素的颜色值所表示,因此颜色特征还具有容易提取、计算简单的优点。
最常用的颜色特征是颜色直方图。
Comaniciu等人提出了基于颜色直方图的跟踪算法[1][2]。
在他们的方法中,颜色直方图受到了核函数的空间加权。
这样区域内中心附近的像素对颜色直方图有更大的贡献,使跟踪更加精确,因为区域边缘的像素可能来自背景或其它物体,其可信度较低。
遮挡情况下基于粒子滤波的视觉跟踪算法研究

。按照遮挡时间长短, 可分为: 瞬时遮挡
和长时间遮挡。 其中运动目标被场景中的静止物 体所遮 挡 是 遮 挡 中 的 常 见 问 题。 多 特 征 跟 踪 算 法
[2 —4 ]
, 对解决目标的自遮挡有良好的效果 ; 多子块
[5 —7 ]
或多区域跟踪算法
, 对运动目标的局部遮挡和
[8 , 9 ]
联合数据关联 瞬时遮挡下具有良好鲁棒性,
第 12 卷 第 32 期 2012 年 11 月 1671 — 1815 ( 2012 ) 32-8536-03
科
学
技
术
与
工
程
Science Technology and Engineering
Vol. 12 No. 32 Nov. 2012 2012 Sci. Tech. Engrg.
遮挡情况下基于粒子滤波的视觉 跟踪算法研究
A 和 C 即为: 那么, 2 0 A = 1 0 0 2 0 1 -1 0 0 0 0 - 1 C = , 0 0
珔 X=X k -1 | k -1
F k ( X ) X
,
珔 X=X k -1 | k -1
在视觉跟踪中, 通常取近似的状态转移模型, 在此选择简单二阶自回归模型。如果将 k 时刻视觉
T xk , yk , x k -1 , y k -1] , 目标状态变量定义为 X k = [ 观测 T xk , y k] 为视觉目标在二维图像域上的位置 Z k = [
, 对
解决多目标之间的相互遮挡有良好的效果 。 但是 当目标发生全部遮挡特别是长时间全部遮挡 , 这些 算法就将失效。 本文在粒子滤波框架下, 提出了静物遮挡情况 下的目标跟踪算法。 首先利用 EKF 对粒子滤波进 行预测采样, 优化了粒子滤波算法, 根据 EKF 预测 判别目标是否发生遮 值和粒子滤波的跟踪值比较, 挡。在遮挡情况下, 利用 EKF 进行跟踪。对于长时 间遮挡, 现提出了跟踪阈值法, 停止 EKF 更新, 减小 误差时间积累, 有效克服了目标丢失问题。
户外环境下抗遮挡的运动目标跟踪方法
1 前 言
基 于视频 的 目标检 测与跟踪 技术是 当今机器视 觉领域 热 点研究 课题之一 , 已广泛应 用于安 防 、 通监控 等场合 。视 并 交
强, 同时处理 时间也越长 。 中每个状 态用一个高斯分布来近 似 , 每个像 素点颜 色取 值用变 量 表示 , 若 来 则定义 当前像素
mo ig ojc. e sao n os s rmo e . i s g te me o fpeitmo e ae n K l n ftr cm— vn bett n h d w a d n i i e v dWhl u i h t d o rdc h e e n h d lb sd o ama l o ie
F NG Ke C N L n in .ni cls n mo ig o jc ta kn to n o to r e vrn n. mp tr E gn e- E 。 HE iqa gA t o c i vn bet r c ig meh d i ud o n io me t — u o Co ue n ier
I si t f Gr p is a d I g s P o e s Ha g h u Din i Un v ri Ha g h u 3 0 8 C i a n t u e o a h c n ma e r c s , n z o a z t i e st y, n z o 1 01 , h n
ojc ,n o jc eet g a d t c ig a meh d bsd o e i rv d mitr u s d li po oe o dtc te bet o betdtci n r kn , to ae n t mpo e xue Gasi mo e s rp sd t eeth s n a h n a
基于尺度自适应和遮挡重定位机制的kcf改进算法
KCF(Kernelized Correlation Filters)是一种在计算机视觉领域广泛使用的跟踪算法。
然而,KCF算法在处理目标尺度变化和遮挡问题时存在一定的挑战。
为了解决这些问题,我们提出了一种基于尺度自适应和遮挡重定位机制的KCF改进算法。
首先,我们引入了一个自适应尺度机制来处理目标尺度变化的问题。
在传统的KCF算法中,跟踪框的大小是固定的,这使得算法在目标尺度变化时容易失效。
为了解决这个问题,我们根据目标的运动信息和周围环境的特征,动态调整跟踪框的大小,以适应目标尺度的变化。
具体来说,我们使用一个滑动窗口来检测目标的运动信息,并根据窗口内目标的特征计算出一个自适应的尺度因子。
然后,我们将这个尺度因子应用于KCF算法中的滤波器,以调整滤波器的大小和响应范围。
其次,我们引入了一个遮挡重定位机制来处理目标遮挡的问题。
当目标被其他物体遮挡时,KCF算法可能会出现跟踪失败的情况。
为了解决这个问题,我们采用了一种基于背景减除的方法来检测遮挡。
具体来说,我们使用一个背景减除器来计算出前景图像和背景图像的差异,并根据差异的大小来判断目标是否被遮挡。
如果目标被遮挡,我们将会重新定位跟踪框的位置,以避免遮挡对跟踪结果的影响。
在实现上,我们使用OpenCV库进行算法的开发和测试。
我们首先对输入的视频帧进行预处理,包括灰度化和滤波等操作。
然后,我们根据预处理后的图像计算出目标的位置和尺度信息,并根据这些信息初始化KCF算法的滤波器和跟踪框。
在每一帧中,我们使用KCF 算法计算出目标的响应图,并根据响应图和自适应尺度因子调整跟踪框的位置和大小。
同时,我们使用背景减除器检测遮挡情况,并根据遮挡情况重新定位跟踪框的位置。
最后,我们将跟踪结果输出到控制台或保存到文件中。
实验结果表明,我们的改进算法在处理目标尺度变化和遮挡问题时具有更好的性能。
在多个标准数据集上的测试结果表明,我们的算法在大多数情况下都能够准确地跟踪目标,并且在处理目标尺度变化和遮挡问题时具有更高的鲁棒性。
基于颜色的快速人体跟踪及遮挡处理

比赛成绩 , 研究了面向体育视频的运动 目标跟踪技术 , 出 了一种 基于 MenS i 的综 合算法. 提 a h t f 首先 , 根据 背景加 权 直方 图选择跟踪 目标与背景 图像 的差别最显著 的部 分作为跟 踪特征 , 以减 少背 景信息对 跟踪效 果 的影 响 ; 其次 , 针
对 M a h t enSi 算法需要对 图像进行穷举 匹配 的问题 , f 利用 K l a a n滤波对 目标 的状态进行有效 预测 , 少 了匹配 运算 m 减 次数 , 改善了快速 运动 目标 的跟踪效 果 , 提高 了跟踪算法 的稳健性 ; 最后运用基于核的 MenS i 算法 对运动 目标进 a h t f
mo igtres Fn l ,r a—i p aigo e tre e lt wa rvd d T e meh d e sr ssa l ,ra- vn agt. ial y e lt meu d t ft ag t mpae sp o ie . h to n u e tbe e l n h t
第 5卷 第 4期 21 00年 8月
智
能
系
统
学
报
Vo . № . I5 4 Aug 2 0 . 01
CAAITr n a to n I tli e tS se a s cinso n elg n y tms
d i1 .9 9 ji n 17 -7 5 2 1 .4 0 2 o:03 6/ . s .63 8 .0 0 0 . 1 s 4
复杂场景下多运动目标遮挡跟踪方法

复杂场景下多运动目标遮挡跟踪方法章节一:引言- 研究背景和目的- 研究意义和价值- 困难和挑战章节二:相关工作- 多目标跟踪方法综述- 常见的遮挡跟踪方法- 各自的优缺点章节三:多运动目标遮挡跟踪框架设计- 框架总体描述- 遮挡检测和遮挡分析- 目标状态预测和修正章节四:实验及结果分析- 数据集和评价指标- 比较实验和结果- 引入复杂场景的实验结果章节五:结论与展望- 本文研究的重要性和意义- 总结本文的工作及成果- 展望未来的研究方向,提出新的探索点注:以上提纲仅为参考,实际撰写时需要具体情况具体分析,更具体的条目也可以增加或者删减。
第一章:引言随着社会发展,无人车、智能家居等需求不断涌现,对多目标跟踪技术提出了新的要求。
特别是在复杂场景下,一些目标往往会发生遮挡,这会对多目标跟踪算法的精度和稳定性造成很大的挑战。
因此,在多目标跟踪领域中,如何解决多运动目标遮挡跟踪问题,成为了研究的一个重要方向。
本论文旨在提出一种针对复杂场景下多运动目标遮挡跟踪的新方法,并对其进行实验验证。
本章节首先介绍了研究背景、目的和意义,接着在此基础上探讨困难和挑战。
1.1 研究背景和目的目前,随着物联网技术的快速发展,人们对于自动驾驶、智能家居、无人仓库等场景的需求日益增加,而多目标跟踪技术正是这些场景中不可或缺的一部分。
多目标跟踪技术可以对复杂场景下的多个目标进行实时定位和跟踪,为智能化设备提供高效的支持。
然而,在实际情况中,多目标跟踪面临着许多困难和挑战,例如光照变化、遮挡和目标的遮挡等。
特别是在目标遮挡场景下,不同目标的状态会受到严重的影响,从而导致跟踪精度急剧下降。
因此,如何针对这一问题提出一种新的多目标遮挡跟踪方法,成为了本研究的主要目的。
1.2 研究意义和价值目前,多目标跟踪技术已经广泛应用于各种领域中,如智能安防、智能交通和机器人等。
本论文的研究成果不仅能够提高多目标跟踪算法在各个领域中的应用效果,还能为相关企业和机构提供技术支持和更好的应用场景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为运动目标的估计。更新匹配特征子块及各予块中心位置。
(4) 错匹配特征子块处理。错匹配特征子块主要是包含背景的边缘块、被遮挡部分以及目标发
生局部形变的子块,因子块灰度发生剧烈变化而出现错匹配。如果错匹配特征子块数超过预定值, 则需重新检测目标,确定目标区域和划分特征块:否则,忽略错匹配特征块获得的目标运动信息估 计,并标记为非特征子块。 (5) 非特征子块处理。更新非特征子块及其中心并计算其灰度方差,对满足第lI步条件的则补
Transaction on Circuits and Systems for Video
Technology,V01.1 6,No.3,2006
vehicles in cluttered scenes with
【3】Oberti E,Calcagno occlusions[C].In:IEEE
629--632
design and
forward
tracking[J].
Transactions on
Image Processing 1 997,6(9):1 270—1 280
【5】侯志强韩崇昭王朝英基于环形像素点匹配的快速图像跟踪算法[J】计算机工程与应用,2004
(28),99--101
768
遮挡情况下的图像跟踪方法
作者: 作者单位: 李涛, 郑爱民 中国电子科技集团公司第二十八研究所 南京 210007
本文链接:/Conference_7182183.aspx
将
舡
瓣
口踪缸i::舞
冒6严重遥挡的特征子块匹配统计 围7离开造挡区域跟踪情况
江苏省系统工程学会第十届学术年会
∞ 伯
∞ 6
.扣0
250
图8有意识地躲避、隐藏时给目标跟踪带来很大困难,试验表明分块跟踪方法可以
解决部分遮挡情况下的跟踪问题。另外,分块跟踪方法把划分的子块进行分类,只选择灰度方差大
对选出的特征子块,按基于相关的匹配跟踪算法计算目标运动信息。对各子块计算出的运动信 息进行统计,以概率大者为该目标的运动信息。具体为: (1)
匹配区域的选择。以第k帧的C(x+Si,y+Sj)为初始点,与目标运动状态相结合,用
Kalman滤波预测七+l帧中各祷征子块中心c(x+8i,y+8j)。在以c(x+8i,y+Sj)y抻心,以
S.,Zara M.,et a1.Robust tracking of humans International Conference
on
Image Processing,Rochestet,New York,USA,2002:
[4】4
IEEE
Altunbasak Y,Tekalp A.M.Occlusion-adaptive,content based mesh
江苏省系统工程学会第十届学术年会
遮挡情况下的图像跟踪方法
李涛,郑爱民 (中国电子科技集团公司第二十八研究所南京210007)
摘要:本文对图像目标蹑踪方法进行了研究,根据图像区域匹配相关算法具有跟踪精度高而基于特
征的图像跟踪算法具有计算复杂度低、抗干扰能力强的特点提出了把区域匹配算法和基于特征的图
像跟踪算法相结合的分块匹配图像跟踪算法。该方法通过对特征子块的统计增强了算法的稳定性,
的部分特征子块进行跟踪,在保证跟踪精度的同时减少了计算负载:通过统计特征子块的状态信息,
选取匹配概率大者作为目标的运动信息有效地避免了测量噪声等不确定因素的干扰。如果把分块跟 踪算法和卡尔曼滤波相结合能跟踪短时完全遮挡情况的目标。但是,分块跟踪方法只适用于成像面 积较大的面目标跟踪和刚性目标跟踪,对非刚性目标跟踪性能并不理想。
参考文献
【1】Yu-Wen
Huang,Shao-Yi Chien,Bing-Yu Hsieh,and Liang-Gee Chen.Global Elimination Algorithm and Architecture Design for Fast Block
Matching Motion Estimation【J】.IEEE Transaction Motion and
,,,p,’p、 ,p p、
Pq产1~7为边长的待匹配矩形区域内搜索匹配。其中V印。■7为与目标的运动速度和帧频率相关的
量,单位为像素。
(2) 相关算法的选择。为减少噪声等因素影响,采用归一化匹配相关算法计算各特征子块在当
前图像中的运动信息。 (3) 运动状态估计。大部分特征块都能正确匹配并获得对目标运动信息的一致性估计,以此作
1遮挡情况下分块匹配跟踪算法
相关跟踪法能够跟踪复杂背景中的复杂运动目标,且具有较高的跟踪精度。但是,运算量非常
大,必须设计专用的硬件设备才能够实现对目标的跟踪。基于特征的匹配跟踪方法在进行特征匹配 时只需要很小的运算量。但是,在提取目标特征(如:边缘、角点、拐点)时需要大量的计算,同 时提取的特征点往往并不理想,从而影响跟踪精度。考虑到目标表面的灰度分布与背景环境的灰度 分布具有不同的规律,尤其当目标表面灰度分布比较复杂时,与背景环境的灰度分布差异更大。因
充为特征子块。 IV.对七+l帧图像中的特征子块重复步骤Ill实现运动目标的图像跟踪。 上述步骤的实现流程如下:
图1分块匹配算法实现过程
3仿真试验
在目标跟踪过程中发生遮挡,遮挡前在序列图像中选取跟踪区域和子块划分情况如图2所示。 其中,跟踪区域被分为50个8×8大小子块,计算各子块方差取阈值丁=13,共选出23个特征子块。
此,可以考虑只选择目标图像或目标图像中的部分为特征实现运动目标跟踪【5】。
2分块匹配跟踪算法实现过程
I.
计算目标区域中心并划分子块
在连续跟踪过程中,假设获得第k帧图像的目标区域为矩形区域,区域中心为C(x,川。以 C(x,少)为中心将目标区域划分为8×8大小2N+l子块,每一子块的中心为C(x+8i,y+Sj), f,/=0,±1,L±N lI.选择特征子块 因为图像的灰度方差能充分反映块内灰度级的差别以及块内边缘的多少,考虑各予块的灰度特
实现了短暂遮挡情况下的目标跟踪。 关键字:图像跟踪,区域分块,图像匹配,目标跟踪
0引言
跟踪地面运动目标经常会发生遮挡现象,如被固定物遮挡或被其它运动目标遮挡。由于敌对目 标会有意识地隐藏、躲避探测,出现遮挡现象会更严重。在遮挡情况下如何实现运动目标的有效跟 踪成为图像跟踪领域研究的重点【1,2】。Oberti Franco等人【3]提出利用广义Hough变换在基于特征匹 配方法中解决目标遮挡问题,文献[4】给出了基于网格模型的遮挡情况下目标跟踪。本文提出一种把 匹配相关算法和特征跟踪算法相结合的分块匹配目标跟踪方法。
性,以灰度方差为依据选择特征子块。根据设定的阙值丁,计算各子块的灰度方差%棚∥8力。当
c萝i2x+St,y+S/)>丁时,则认为该子块包含了较多目标特征,标记为特征子块:否则,认为该子块较平坦,
765
江苏省系统工程学会第十届学术年会
包含目标特征信息较少,标记为非特征子块。这样选出的特征子块一般包含两种情况:一类是位于 目标边缘的子块,其包含部分目标和背景;另一类是包含丰富特征信息的子块。 III.特征块匹配和目标运动信息估计
on
Circuits and
Systems for Video Technology,V01.1 4,No.6,2004
【2】Viet・Anh
Frame
Nguyen and Yap—Peng Tan.Efficient Block—Matching
Estimmion Based
on
Integral
Attributes【J】.IEEE
766
Ⅱ苏省系统I程学会第十屈学术年台
图3、图5、圈7分别为目标进入连挡区域、严重返挡和离开遮挡区域的跟踪情况.圈4、圉6、图 8分月4为相应特征子块的匹配情况。从图3到圈8可以看出,随跟踪区域被遮挡部分的增大正确匹 配的特征子块逐渐减少:当目标逐渐离开遮挡区域时,正确匹配的特征子块迅速增加。由于采用统 计方法确定目标跟踪信息,即使在遮挡较严重的情况下仍能够正确跟踪目标。