一种三自由度运动平台及其控制系统
三自由度圆柱坐标型工业机器人设计
三自由度圆柱坐标型工业机器人设计引言工业机器人在现代制造业中起着至关重要的作用。
圆柱坐标型工业机器人是一种具有三个自由度的机器人,它可以在三维空间内进行精确的定位和操作。
本文将着重讨论三自由度圆柱坐标型工业机器人的设计原理和关键技术。
一、设计原理三自由度圆柱坐标型工业机器人的设计原理基于坐标变换。
它由一个立柱状的垂直轴和一个平行于地面的基座组成。
机器人的主要部件包括立柱、支撑臂、关节和末端执行器。
机器人的立柱可以在垂直方向上运动,提供Z轴位移。
支撑臂位于立柱的顶部,可以绕水平方向的Y轴旋转,提供Y轴位移。
末端执行器连接在支撑臂的末端,可以绕垂直方向的Z轴旋转,提供X轴位移。
二、关键技术1.位置传感器:为了实现精确的定位和操作,对机器人的运动进行准确的测量是必不可少的。
位置传感器可以用来测量机器人各个关节的角度以及末端执行器的位置信息。
2.逆运动学:逆运动学是指通过末端执行器的位置和姿态计算出机器人各个关节的角度。
通过逆运动学算法,可以实现机器人在三维空间内的精确定位。
3.控制系统:控制系统是三自由度圆柱坐标型工业机器人的核心。
它接收来自传感器的反馈信息,计算机器人的位姿,并输出相应的指令控制机器人的运动。
控制系统需要具备实时性和稳定性,以确保机器人的运动精度和安全性。
4.动力学分析:动力学分析可以帮助我们理解机器人在运动过程中的力学特性。
通过动力学分析,可以确定机器人在给定任务下所需的扭矩和力,并进行相应的力矩配平和选型。
三、设计步骤1.确定任务需求:在开始机器人设计之前,首先需要明确机器人所要完成的任务和工作环境。
2.选择结构参数:根据任务需求和工作环境,选择机器人的结构参数,包括立柱高度、支撑臂长度和末端执行器负载能力等。
3.逆运动学分析:根据机器人的结构参数和任务需求,进行逆运动学分析,得到机器人各个关节的角度和末端执行器的位姿。
4.控制系统设计:设计机器人的控制系统,选择合适的控制算法和硬件设备,实现机器人的运动控制和姿态调整。
三自由度摇摆台方案设计及仿真分析
第19卷 第12期 中 国 水 运 Vol.19 No.12 2019年 12月 China Water Transport December 2019收稿日期:2019-07-23作者简介:时阳阳(1993-),男,上海理工大学硕士生。
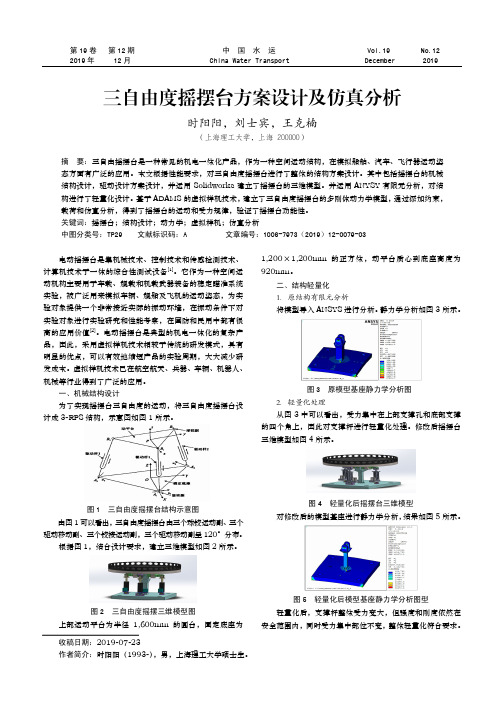
三自由度摇摆台方案设计及仿真分析时阳阳,刘士宾,王克楠(上海理工大学,上海 200000)摘 要:三自由摇摆台是一种常见的机电一体化产品,作为一种空间运动结构,在模拟船舶、汽车、飞行器运动姿态方面有广泛的应用。
本文根据性能要求,对三自由度摇摆台进行了整体的结构方案设计。
其中包括摇摆台的机械结构设计,驱动设计方案设计,并运用Solidworks 建立了摇摆台的三维模型。
并运用ANYSY 有限元分析,对结构进行了轻量化设计。
基于ADAMS 的虚拟样机技术,建立了三自由度摇摆台的多刚体动力学模型,通过添加约束,载荷和仿真分析,得到了摇摆台的运动和受力规律,验证了摇摆台功能性。
关键词:摇摆台;结构设计;动力学;虚拟样机;仿真分析中图分类号:TP29 文献标识码:A 文章编号:1006-7973(2019)12-0079-03电动摇摆台是集机械技术、控制技术和传感检测技术、计算机技术于一体的综合性测试设备[1]。
它作为一种空间运动机构主要用于车载、舰载和机载武器装备的稳定瞄准系统实验,被广泛用来模拟车辆、舰船及飞机的运动姿态,为实验对象提供一个非常接近实际的振动环境,在振动条件下对实验对象进行实验研究和性能考察,在国防和民用中都有很高的应用价值[2]。
电动摇摆台是典型的机电一体化的复杂产品,因此,采用虚拟样机技术相较于传统的研发模式,具有明显的优点,可以有效地缩短产品的实验周期,大大减少研发成本。
虚拟样机技术已在航空航天、兵器、车辆、机器人、机械等行业得到了广泛的应用。
一、机械结构设计为了实现摇摆台三自由度的运动,将三自由度摇摆台设计成3-RPS 结构,示意图如图1所示。
三自由度平台参数参考

三自由度平台的参数参考及注意点
A.座椅表面到地面的高度:
平台安装的座椅,座椅面的高度距离地面不得超过2米,超过2米就涉及《特种设备制造许可规则》(如下图)
B.前后排座椅高度:
为了良好的游戏体验,不影响后排视野,前后座椅之间的高度差在450-500mm(如下图)
C.平台框架宽度及座椅间距离:
平台在没有外包装的情况下应尽量的将上平面框架最小化。
(如下图)
1.单个座椅宽度550-600mm,座椅和座椅间距离适中,不影响乘员的体验,框架的宽度不超过2000mm
2.前后排座椅的间距在1000-1200mm
D.平台与地面固定:
示意地面浇注嵌入预埋件,如图
对现有框架图示说明(见下图)
E.关于框架强度问题:(此框架为示意框架)
图示为80*80*3mm矩形管,框架外形尺寸为2000mm*2000mm,经过框架的之前三点的固定方式,在框架的一端加3000N的力,得到结果发现:。
三自由度机器人设计毕业设计
三自由度机器人设计毕业设计一、引言近年来,机器人技术的发展为各行各业带来了巨大的变革和进步。
而在机器人设计的领域中,三自由度机器人一直以其简单、灵活和易于控制等特点备受关注。
本设计将围绕三自由度机器人的设计,研究其结构、控制系统以及应用。
二、三自由度机器人的相关概念三自由度机器人是指具有三个独立运动自由度的机器人。
在其结构设计中,一般包括三个旋转关节或者直线关节,使得机器人能够在三个不同的方向上运动。
这种结构使得三自由度机器人具有较强的灵活性和适应性,适用于各种各样的工业应用场景。
三、三自由度机器人的设计原理1. 结构设计:三自由度机器人的结构设计涉及到关节的选型、传动系统的设计以及工作空间的规划等方面。
应考虑机器人的稳定性、精度和载荷能力,以及工作环境的特点,如狭窄空间、高温或高湿度等因素。
2. 控制系统设计:三自由度机器人的控制系统设计应考虑到运动轨迹规划、动力学建模、传感器系统和实时控制等方面。
尤其是对于工业应用来说,控制系统的稳定性和精度是至关重要的。
3. 应用设计:三自由度机器人的设计还需要考虑具体的应用场景,例如装配、搬运、焊接、切割等。
在设计过程中,需要充分了解工艺流程和需求,以确保机器人的设计符合实际应用的需要。
四、毕业设计的主要内容1. 三自由度机器人结构设计:在毕业设计中,将对三自由度机器人的结构进行设计和优化,包括关节选型、传动系统设计以及工作空间规划等。
2. 控制系统设计:设计三自由度机器人的控制系统,包括运动规划、动力学建模、传感器系统设计以及实时控制算法的研究。
3. 应用案例研究:以实际应用场景为背景,设计并实现三自由度机器人的具体应用,如装配、搬运或焊接等。
4. 实验验证与性能评估:通过实验验证,对设计的三自由度机器人进行性能评估,包括精度、稳定性、响应速度等方面的指标。
五、预期成果1. 完整的三自由度机器人设计方案,包括结构设计、控制系统设计和应用案例研究。
2. 实验验证数据和性能评估报告,验证毕业设计的可行性和有效性。
三轴测试转台控制系统设计

三轴测试转台可以在实验室条件下模拟飞行器在空中实际飞行时的各种姿态,复现其运动时的动力学特征,从而对它们的制导系统、控制系统及其相应器件的性能进行反复仿真和测试,获得试验数据,并据此对其进行重新设计和改进,达到总体设计的性能指标要求。仿真转台性能的优劣直接关系到仿真实验的逼真性和置信度,是保证航空、航天型号产品和武器系统的精度和性能的基础。随着飞行器型号的不断更新,性能的日益提高,对导航和制导设备的性能和精度的要求也在不断提高。这就给仿真转台的整体制造水平提出了新的课题,也给转台控制系统的设计与实现提出了更高的要求[2][3]。
三轴测试转台具有内、中、外三个回转自由度的万向框架,如图2-2所示每个框架由一套驱动元件驱动,负责控制转台的一个方向运动。其中,外框架负责飞行器偏航姿态模拟,中框架负责飞行器俯仰姿态模拟,内框架负责飞行器自旋转模拟。三个框架组合运动,便可以模拟飞行器在空中的各种飞行姿态[9]。
图2:深入超低速的速率精度和速率平稳性、动态测角精度检测方法的研究。
(7)加强功能性专一的转台设备的研究,降低多用性,使转台简化。避免多种功能集于一种转台的误区。
1.3 本文的主要研究内容
本论文以实际课题为背景,对设计过程中的一些理论和实际问题进行了分析研究。在该课题中我主要承担三轴测试转台控制器的设计。论文研究的主要内容如下:
2.2 三轴测试转台控制系统的原理
由于普通上位计算机不适宜直接控制电机,所以系统采用上位机和下位机两级控制结构。总体控制原理方案如图2-3所示。
图2-3 系统总体控制原理方案
机械系统的自由度和约束

机械系统的自由度和约束机械系统是由各种互相连接和配合的零件组成的,它们通过各种约束和连接方式形成一个协同工作的整体。
在机械领域中,自由度和约束是研究和设计机械系统的重要概念。
本文将详细探讨机械系统中的自由度和约束的概念及其在设计中的应用。
一、自由度的概念及计算方法自由度是指在机械系统中能够独立运动的最小参数数量。
例如,一个物体在三维空间中的运动需要有三个自由度,因为它可以绕三个轴线进行独立的旋转和平移。
一般来说,机械系统的自由度取决于其可变参数的数量。
在计算机械系统的自由度时,我们可以使用以下公式:F = 3N - C - J其中,F代表自由度,N代表物体的自由度数量,C代表约束的数量,J代表关节类型的数量。
通过计算可得出机械系统的自由度。
二、约束的概念及分类约束是指限制机械系统中零件或物体运动的条件。
在机械系统中,约束分为几种不同的类型,具体包括:1. 几何约束:指的是机械系统中物体之间的位置和方向关系的约束。
例如,一根钢杆通过螺旋装配在两个零件之间,就限制了它们的相对位置和方向。
2. 力学约束:指的是机械系统中物体之间的力和力矩关系的约束。
例如,一个受力的杆件在两端受到固定约束,限制了杆件的运动。
3. 运动约束:指的是机械系统中物体的运动范围和运动方式的约束。
例如,一个平台通过导轨固定在一个平面上,只能在平面上做平移运动。
三、自由度与约束的关系自由度和约束在机械系统中相互制约,它们的关系可以通过以下公式表示:F + C = 3N - J这个公式表明,在机械系统中自由度和约束的总和等于可变参数的数量减去关节的数量。
一般来说,自由度和约束的关系是互补的,当自由度增加时,约束相应减少,反之亦然。
四、自由度和约束在机械系统设计中的应用在机械系统的设计中,理解自由度和约束的概念是非常重要的。
通过合理地设置自由度和约束,可以实现机械系统的运动控制和稳定性。
首先,自由度和约束的分析可以帮助我们确定机械系统的运动自由程度。
三自由度并联物料振动分拣平台机构设计及运动仿真
Ab s t r a c t : I n o r de r t o s o l v e t he p r ob l e m t h a t t r a di t i on a 1 ma t e r i a l vi br a t i on s or t i ng p l a t f o r m c a nno t c o m p1 e t e t h e mul t i — d i me ns i on a l v i br a t i on, a ki n d o f 3 - DOF p a r a l l e l ma t e r i a l v i br a t i on pl a t f o r m wa s
输 出变 量 间运 动学 解 析 表 达 式 . 运 用 Ma t l a b对 位 置 正 解 进 行 计 算 , 通 过 Me c h / P r o接 口软 件 将 P r o / E 中 建 立 的 模
型导 入 A DA M S中 进 行 运 动 仿 真 , 并 将 计 算 结 果 与 仿 真 结 果 进 行 分 析 和 对 比. 两者结果相同 , 验 证 了 结 构 分 析 及 位 置 求 解 的 正确 性 . 关键 词 : 并联机构 ; 振动分拣 ; 三 自由度 ; 位置分析 ; 运 动 学 分 析
D- H ma t r i x wa s a p pl i e d t o e s t a bl i s h t he ki ne ma t i c a l mod e l of t he me c ha n i s m . The a na l y t i c a l e x— Dr e s s i on b e t we e n i np ut v a r i a bl e s a nd ou t pu t o ne s wa s e s t a b l i s h e d by t he a na l ys i s of t he po s i t i v e
一种三自由度并联机器人运动轨迹精度的可靠性研究

一种三自由度并联机器人运动轨迹精度的可靠性研究六口李兵口张晓瑾口谢里阳口魏玉兰东北大学机械工程与自动化学院沈阳110004摘要:机器人轨迹精度的可靠性是评价机构性能的重要参数。
压电材料作为一种驱动器能够抑制机器人柔性连接杆的振动,在抑制振动的同时也提高了机器人运动轨迹的精度。
首先介绍了一种三自由度平面并联机器人系统;其次表达了振动控制系统的工作原理和实验分析;然后分别表达了不考虑振动和考虑振动因素时机器人轨迹精度的可靠度计算方法;最后分析了无振动控制和有振动控制时机器人运动轨迹精度的可靠度。
可靠度计算表明,振动控制系统能够提高机器人运动轨迹精度的可靠度。
关键词:并联机器人减振轨迹精度可靠性中图分类号:TP2420328文献标识码:A文章编号:1000一4998(2010)lO—O005一04Abstract:Thereliabilityofthetrajectoryaccuracyofthemnipulatorisimponantp啪metertoevaluatetheperfomanceoftIlem粕ipulator.ThevibmtionoftIlenexiblelinkIge8ofthem肌ipulatorc锄besuppressedwhenthepiezoelectricmaterialisu鸵d鹊a咖sducer.Andthekine啪tictrajectoryaccuracyofthem锄ipulatorisimprovedatthes舢etime.Athree—degree—of—f}eedompl衄盯paraUelrnanipulatori8in删ucedfirst.Thentheworkingprincipleandexperimentalanalysisofthevibrationsuppression8ystema聆pre鸵med.Thecalculatingmethodsofthereliabilityofthet阳jectoryaccuracyof山e毗njpulatorwithwithoutvibmtionfactorcorIside陀dalsoprovided.Finally,tlIe陀liabilityofkinematict陋jectory∞curacyofIhemIlipIllatorwithwithout、ribmtionsupp陀ssionis锄lyzed.Theresultsshowthatthereliabilityofthekinematictmjectoryaccumcyofthe眦nipulatorbeimpmvedwit}Ithehelpofvibmtionsuppres8ion.Keywords:Par棚elMaIIipIllatorVmmti帅Su坤re辎i伽TrajectoryAc饥ncyReIiability并联机器人具有刚度大、运动精度高等优点而被广泛使用在航天工业和制造业中…。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工艺装备I P『OCOS,S Equipn ̄elll
一
种三自由度运动平台及其控制系统
栖晓彬
哈尔滨庆缘电工材料股份有限公刮.黑龙江哈尔滨150040
l引盲
_t自}=I=1度运动系统在 领域中应刷比较r泛.一 般要求系统具有绕水平面内两个坐标轴的转动自由度和 沿z轴的平动自由度… .翱前陶内已有的一些运动平台, 承载能力小.自动化程度不高.精度低?奉文提出一种三 九 度运动平台.为r提高精度.利用3个闷控液 缸作 为驱动部件.提高定位精度和承载能力 在测拄系统中采 J_}j多机控制.井州以太l删进行埔 2平台的运动机构 ‘自幽度运动平台的结构如 l所永,m同定底座、 运动平台、 控液压缸组成.左侧两个液 缸’j底座之 问 动平台之I'rl-j ̄IIt采用球铰连接.打删液胍缸与平台之 11;1J采j=I_】虎兜饺连接,而。 底 座之间为固定连接,1.¨较制
缸简和活塞杆之问的转
动 由于} 述各铰的约
求.系统的白出度数为3.
刚好 有绕 和} 轴两个
转列]t't f 度 1 }z轴I1
动自m度..
3控制系统设计
崎甲台川做运动模拟删, 难洲控系统n勺控制F的
作原理{【1=1I刳l所求 莳先I 他机接受¨I】’・输人的f 咨
运动指令,删刚 台flc】运动 反解模块生成删掣的澉H
襄4弯曲检验衷
钠规格锕 状怠1承辅能力knU'=40him)l增J】l=f幅度
25t;l 20MnK 处理 。 1 27o=1.
29t 20MnK 热轧I 270
(2)20M¨K号u JI!!铡的强度水平(≥540 MPH),达到
旧外同类u型钢强度水平(500 Mt )
柃虢结果袭明,经控冷热处删后ff勺25U.不仅可以替
代热轧的29U型钢,并肄有1.44倍安全系数。
2,4 U型钢支架整米承栽能力试验(中I;t矿业大学岩层力
学中 试验宣)
立架支护阻力(等于支l架琅受的全部外载衙)与支架
坝粱下沉量和两帮移近鲢的关系,见下罔l硬丧5.两种支
架均在搭接处产 E滑移.均未搠坏..
襄5 I.I型钢支架整璺譬试验结果
136 I机械工程师2006年第5期
3经济分析
通过技术指标的分IIM ̄VJ;41.符J 热处理251.1 J 例代
替29U喇钢.则处理1吨25 L1’ 约钢利16O kg;I,qN.川t
热处理29u替代36U, 吨 约钢材24I k#;以令架I刑t
型钢年需求缝10000 1吨 u划钢价格300(I』 ,ilil ̄i< r算.
约材料资金分别为480玎死和723万元=.扣除热处婵!成
本, 约资金儿 万兀.优得注意们灶.热处理产最
生产成本衡娜车H炎,只有保证大批量连续生产, _能发挥
陔q+J 线的败川.Jt创造 ・g火的效莅
综卜所述,坩U刚钢控冷热处理厢.1叮 兽提高II
J 钢史架的强度.撼小史架 他川・ I1的变嘭和失效.增强
霞全【1 J.靠性,延【乇I 俐盘架的 均州服年限;NI以f}{小
断耐的I J 铡替代人断耐的【I剞钠. 利 约火量钢
材 减轻盘护篮姨n勺嘶动强J篁的¨的 I蝙斟明涛)
作 哺介:赵广引(1967-】.士.讲师,王垂从事教学和科研工作
性稿日相:201)6-01—09
维普资讯 http://www.cqvip.com
P rocess Equipment l工艺装备
缸位移信号,输入到下位机,下位机
将上述期望的液压缸位移信号转换
成期望的电压信号再和实际传感器
采来的液压缸位移信号相比较形成
偏差,输入到控制器,由控制器解算
出控制量并对阀控缸系统进行控制。
另外系统中还引入了动压反馈校正
来提高系统的阻尼。
上位机和下位机之间通过以太
网进行通讯。上位机的任务是监控运
动系统的工作状态和运动参数;接受
操作人员的控制指令;将控制指令通
过以太网和RS一232串行通讯接口发送到下位机。下位
机根据平台输出的期望液压缸位移,根据PID控制算法
解算出控制指令,输出到每个伺服阀控制液压缸实现要
求的运动。
4液压伺服驱动系统
由于受空间的限制,液压伺服驱动系统中采用了差动
液压缸,并采用伺服阀进行控制,阀控缸动力机构见图3。
参考文献[2]和[3]可以推导出阀控缸动力机构的传
递函数为:
:二!盘::釜 ㈩ 一I 什 …
s
( s ( 耘+ 川
式中 为阀芯位移,A 为无杆腔的有效面积;A 为有杆
腔的有效面积。 。为伺服阀的流量增益; 。为阀的流量
压力系数;V 为液压缸两腔总容积的一半。 为等效质
量, 为等效外负载力。
所以液压周有频率和阻尼比分别为
浮 (2)
=
1 Vof1. +}等 (3)
由于伺服放大器和位移传感器的频响远大于液压固有
频率,所以都可以看作是比例环节,可以分别用下式表示:
=
(4)
式中, 为伺服放大器的放大系数; (s)为伺服放大器
的输入电压;,(s)为伺服放大器的输出电流。
r
(5)
式中, ( )为位移传感器的输出电压;研为位移传感器
的放大系数。
由于所采用的电液伺服阀的频响较高,可以将其看
作一个二阶环节,即 G (s)=— —_. (6)
+ +1
∞ fit)
由式(1)、(4)至(6)可以确定单个阀控缸系统的开环传递函
数为 ‰ ∽) \
∞; ∞ ¨∞ ∞^ /
式中, 厂系统的前置增益。
动压反馈是液压伺服系统中一种常用且有效的校正
方法,动压反馈就是将液压缸两腔压差信号经过微分校
正装置反馈到伺服阀输入端,构成压力微分反馈。它可以
提高系统的阻尼比_2]。系统在位置闭环并采用比例控制
器,加入动压反馈的系统方块图如图4所示,图中, 为
动压反馈系数。
5结束语
本文提出了一种新型的三自由度运动平台,该平台由
3个液压缸驱动,采用液压伺服驱动方式,克服了现有的一
些三自由度平台采用液压传动加人工手动控制方式所固
有的精度低、可靠性差、效率低等缺点,控制系统的设计合
理、可靠。自动化程度大大提高,值得进一步推广应用。
[参考文献]
[I]黄真, L令富,方跃法.并联机器人机构学理论及控制[M].北
京:机械工业出版社。1997:19—32.
[2]李洪人.液压控制系统[M] E京:国防工业出版社,1990.
[3]赵强,李洪人.六自由度转台的神经网络控制[J].东北林业大
学学报,2001,29(6):73—75. (编辑立明)
l作著筒 : 晚彬(1964-j,女。工程师,主要从事设备管理工作。
收稿日期:2006一Ol一24
机械工程师2006年第5期l 137
维普资讯 http://www.cqvip.com