国内外比较好的几款飞控系统介绍和性能配置
采用STM32设计的四轴飞行器飞控系统

采用STM32设计的四轴飞行器飞控系统四轴飞行器飞控系统是一种应用于四轴飞行器上的关键控制设备。
它包括硬件和软件两个部分,用于控制飞行器的姿态、稳定性和导航等功能。
其中,采用STM32设计的四轴飞行器飞控系统因其高性能、低功耗和丰富的外设资源而受到广泛关注。
一、硬件设计:1.处理器模块:采用STM32系列微控制器作为处理核心。
STM32系列微控制器具有较高的计算能力和丰富的外设资源,能够满足飞行控制的计算需求。
2.传感器模块:包括加速度计、陀螺仪、磁力计和气压计等传感器。
加速度计用于测量飞行器的线性加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量飞行器的方向,气压计用于测量飞行器的高度。
3.无线通信模块:采用无线通信模块,如蓝牙、Wi-Fi或者无线射频模块,用于与地面站进行通信,实现飞行参数的传输和遥控指令的接收。
4.电源管理模块:对飞行器的电源进行管理,确保各个模块的正常运行。
包括电池管理、电量检测和电源开关等功能。
5.输出控制模块:用于控制飞行器的电机、舵机等执行机构,实现对飞行器的姿态和动作的控制。
二、软件设计:1.飞行控制程序:运行在STM32微控制器上的程序,用于实时读取传感器数据、运算控制算法、输出控制信号。
该程序包括姿态解算、飞行控制和导航等模块。
-姿态解算模块:根据加速度计、陀螺仪和磁力计等传感器数据,估计飞行器的姿态信息,如俯仰角、横滚角和偏航角。
-飞行控制模块:根据姿态信息和目标控制指令,计算出电机和舵机的控制信号,保证飞行器的稳定性和灵敏度。
-导航模块:利用GPS等导航设备获取飞行器的位置和速度信息,实现自动驾驶功能。
2.地面站程序:在地面计算机上运行的程序,与飞行器的无线通信模块进行数据交互。
地面站程序可以实时监测飞行器的状态和参数,并发送控制指令给飞行器。
总结:采用STM32设计的四轴飞行器飞控系统是一种高性能、低功耗的控制设备,包括硬件和软件两个部分。
硬件包括处理器模块、传感器模块、无线通信模块、电源管理模块和输出控制模块。
几大主流开源飞控平台优劣比较
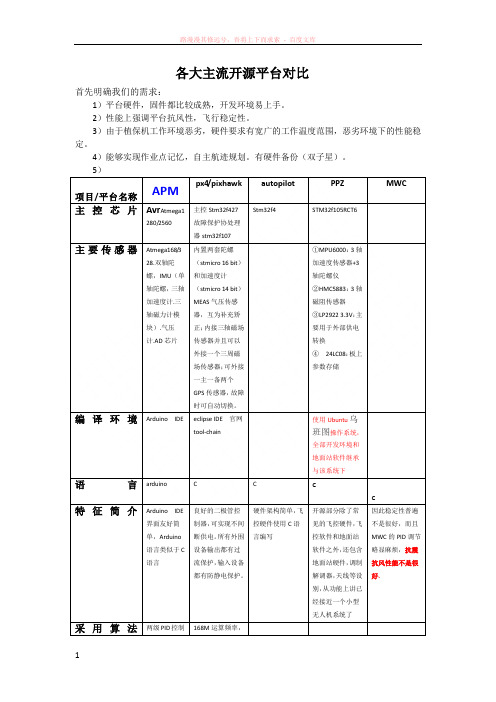
各大主流开源平台对比首先明确我们的需求:1)平台硬件,固件都比较成熟,开发环境易上手。
2)性能上强调平台抗风性,飞行稳定性。
3)由于植保机工作环境恶劣,硬件要求有宽广的工作温度范围,恶劣环境下的性能稳定。
4)能够实现作业点记忆,自主航迹规划。
有硬件备份(双子星)。
项目/平台名称APM px4/pixhawk autopilot PPZ MWC主控芯片Avr Atmega1280/2560 主控Stm32f427故障保护协处理器stm32f107Stm32f4 STM32f105RCT6主要传感器Atmega168/328.双轴陀螺,IMU(单轴陀螺,三轴加速度计.三轴磁力计模块).气压计.AD芯片内置两套陀螺(stmicro 16 bit)和加速度计(stmicro 14 bit)MEAS气压传感器,互为补充矫正;内接三轴磁场传感器并且可以外接一个三周磁场传感器;可外接一主一备两个GPS传感器,故障时可自动切换。
①MPU6000:3轴加速度传感器+3轴陀螺仪②HMC5883:3轴磁阻传感器③LP2922 3.3V:主要用于外部供电转换④24LC08:板上参数存储编译环境Arduino IDE eclipse IDE 官网tool-chain 使用Ubuntu乌班图操作系统,全部开发环境和地面站软件继承与该系统下语言arduino C C cc特征简介Arduino IDE界面友好简单,Arduino语言类似于C语言良好的二极管控制器,可实现不间断供电。
所有外围设备输出都有过流保护,输入设备都有防静电保护。
硬件架构简单,飞控硬件使用C语言编写开源部分除了常见的飞控硬件,飞控软件和地面站软件之外,还包含地面站硬件,调制解调器,天线等设别,从功能上讲已经接近一个小型无人机系统了因此稳定性普遍不是很好,而且MWC的PID调节略显麻烦,抗震抗风性能不是很好.采用算法两级PID控制168M运算频率,方式,第一级是导航级,第二级是控制级开放性好,先进的定高算法,两套陀螺和加速度计,护卫补充矫正,内置三轴磁场传感器,一主一副两个GPS传感器,可自动切换官方硬件平台APM2.5:板载电子罗盘APM2.6:电子罗盘外置和GPS融合了Px4Pixhawk是px4的升级CC、CC3D、ATOM、Revolution、Revolution nano等,衍生硬件包括Sparky、Quanton、REVOMINI等,甚至包含直接使用STM32开发板扩展而成的FlyingF3、FlyingF4、DescoveryF4PPZ Lisa 拥有大量扩展接口总结优势:1.APM使用人数多,资料丰富齐全,特别是经典款APM2.5。
APM飞控系统详细介绍

换成数字量,以供后续计算
电源芯片,usb 电平转换芯
片等
飞控原理 在 APM 飞控系统中,采用的是两级 PID 控制方式,第一级是导航级,第二级是控 制 级 , 导 航 级 的 计 算 集 中 在 medium_loop( ) 和 fastloop( ) 的 update_current_flight_mode( ) 函 数 中 , 控 制 级 集 中 在 fastloop( ) 的 stabilize( )函数中。导航级 PID 控制就是要解决飞机如何以预定空速飞行在预 定高度的问题,以及如何转弯飞往目标问题,通过算法给出飞机需要的俯仰角、 油门和横滚 角,然后交给控制级进行控制解算。控制级的任务就是依据需要的 俯仰角、油门、横滚角,结合飞机当前的姿态解算出合适的舵机控制量,使飞机 保持预定的俯仰 角,横滚角和方向角。最后通过舵机控制级 set_servos_4( ) 将控制量转换成具体的 pwm 信号量输出给舵机。值得一提的是,油门的控制量是 在导航级确定的。控制级中不对油门控制量进行解算,而直接交给舵机控制级。 而对于方向舵的控制,导航级并不给出方向舵量的解算,而是由控制级直接解算 方向舵控制量,然后再交给舵机控制级。 以下,我剔除了 APM 飞控系统的细枝末节,仅仅将飞控系统的重要语句展现,只 浅显易懂地说明 APM 飞控系统的核心工作原理。 一,如何让飞机保持预定高度和空速飞行 要想让飞机在预定高度飞行,飞控必须控制好飞机的升降舵和油门,因此,首先 介绍固定翼升降舵和油门的控制,固定翼的升降舵和油门控制方式主要有两种: 一种是高度控制油门,空速控制升降舵方式。实际飞行存在四种情况,第一种情 况是飞机飞行过程中,如果高度低于目标高 度,飞控就会控制油门加大,从而 导致空速加大,然后才导致拉升降舵,飞机爬升;第二种情况与第一种情况相反; 第三种情况是飞机在目标高度,但是空速高于目 标空速,这种情况飞控会直接 拉升降舵,使飞机爬升,降低空速,但是,高度增加了,飞控又会减小油门,导 致空速降低,空速低于目标空速后,飞控推升降舵,导 致飞机降低高度。这种
500公斤级无人直升机飞控导航系统的设计与应用

500公斤级无人直升机飞控导航系统的设计与应用随着科技的不断发展,无人直升机在民用和军事领域的应用越来越广泛。
而无人直升机的飞控导航系统是其核心部件,对于飞行的安全和效率至关重要。
本文将重点介绍500公斤级无人直升机飞控导航系统的设计与应用。
一、飞控导航系统的设计1. 飞控系统飞控系统是无人直升机的大脑,负责控制飞机的姿态、飞行高度、速度等。
500公斤级无人直升机通常采用惯性导航系统和GPS卫星导航系统相结合的方式进行飞行控制。
惯性导航系统可以实时监测飞机的姿态和加速度,而GPS卫星导航系统则可以提供飞机的位置和航向信息。
飞控系统通过精确的计算和数据处理,使无人直升机能够实现自主飞行和导航。
2. 导航系统500公斤级无人直升机的导航系统需要具有高精度、高可靠性和抗干扰能力强的特点。
导航系统通常包括导航计算器、导航传感器、导航显示器等组成。
导航计算器负责对飞行数据进行处理和计算,导航传感器可以实时监测飞机的位置、速度和航向,导航显示器则向飞行员展示飞行信息和导航路径。
导航系统还需要具备自动避障、自动着陆等功能,以提高飞行的安全性和可靠性。
3. 通信系统500公斤级无人直升机的通信系统需具备高速、稳定、安全的特点,以保证飞行数据的及时传输和指令的准确执行。
通信系统通常包括航空雷达、卫星通信、数据链等模块,可以实现与地面站的双向通信和飞行数据的实时传输。
通信系统还需要具备防干扰和抗干扰能力,以应对复杂的电磁环境和敌方干扰。
1. 民用应用500公斤级无人直升机在民用领域具有广泛的应用前景,如农业喷洒、环境监测、物流运输等方面。
飞控导航系统可以使无人直升机实现自主脱离和着陆,实时监测作业区域的情况,并根据预先设定的航线进行飞行,大大提高了飞行的安全性和效率。
飞控导航系统还可以实现无人直升机和地面站的实时通信,方便操作人员对飞机进行监控和指挥。
2. 军事应用500公斤级无人直升机在军事领域具有重要的作用,如无人侦察、无人打击、战场通信等方面。
主流飞控和433以及图传评测

1. Arkbird2.0刚入坑的时侯恰逢Arkbird 2.0 面市,被其强大的市场推广(品牌塑造)所蛊惑,随即入手成为最早使用2.0的一批玩家,先说说其优点:A2.0飞控和各个配件乃至包装都是十分用心,做工精良,飞控、GPS、空速管等封装精美,1.0我没有用过,就2.0而言我认为功能已经比较全面了,云台增稳输出和襟翼控制(自动襟翼和缓放)功能相当实用,刚刚更新推出地面站功能,全中文OSD设置界面也十分简便快捷,很容易上手,无缝配合a家的433和aat 使用体验很好,接线也很简洁,感觉Arkbird正在全力打造自己品牌和产品生态圈,比较有活力,客服态度很积极,群主回复技术问题很迅速,固件改良升级频率也教高,不得不说A2.0的缺点也是比较明显的,可以看得出a2.0精心设计的高清战斗机osd界面是其卖点之一,但我个人的使用体验并不是太好:画面元素过于堆叠拥挤,字体边缘粗糙模糊,画面中间三道人工地平线占据了很大面积,在飞行过程中大范围活动,十分影响欣赏航拍风景体验,另外其默认界面又过于索然乏味,体验一般;我认为A2.0最大的一个槽点就是升级方式,飞控的升级需要分上下层分别插串口转usb升级,其中下层还必须上网注册,上层升级接口在飞控内部,需要把飞控整个拆下来线拔掉卸开螺丝去掉外壳才能接数据线,十分坑爹,为此不知道浪费了多少3M胶。
A433:就目前我实用的感受而言,表现还算不错,飞10km信号还是99,就是高功率模式发热量巨大,转发模式一块3s2200供电最多1小时就没电了。
总评:虽然A2.0还有很多需要改进和完善的地方,但仍不失为新人入FPV的最佳选择,设置简单上手快,各种保护设计把认为人为失误率降到最低,只要不是过分纠结osd界面的话,我相信a控会在以后的升级里面逐步优化。
2.MFD使用MFD最直观的一个感受就是,产品很成熟,配件做工不够精细(没有封装,裸板)但足够专业(所有接线都为屏蔽线)功能全面且实用,A控现在才有的地面站和双机伴飞功能,MFD已经有了很久且很成熟,OSD战斗机HUD显示界面非常漂亮大方,关键信息显示突出显眼,刷新速度相当快,完全没有延迟的感觉(A2.0刷新也很快,反应迅速),英文osd调参对于没有英语基础的朋友来说有一定不便,MFD是很多资深玩家的选择,调参的内容相对arkbird要丰富得多,有定点盘旋模式,方便临时脱个控抽支烟啥的。
四轴飞控总结详尽的介绍各种飞控来源及硬件资源核心部分

四轴飞控总结详尽的介绍各种飞控来源及硬件资源核心部分四轴飞控总结详尽的介绍各种飞控来源及硬件资源核心部分从团队选择无人机项目开始,我的前期工作就是了解现在市场上所有的飞控以及功能,为接下来的无人机飞控打下基础。
现在市场上的飞控种类很多,常见的有MK、KK、KK flycam、EAGLE N6、玉兔飞控、FF、WKM、FC1212-S、MWC、FY等等,国内也是有越来越多的团队开始研究四轴飞控,其中很多属于山寨。
MK是德国的开源项目,但一般价格较贵,整个一套估计要1000多,且对模友的基础要求较高,玩的人不是很多。
KK是法国的开源项目,国内许多团队利用其开源的特点,将硬件电路和程序照搬过来然后在市场上卖,竞争比较激烈,因此价格很便宜,贵一点的也就100多便宜的只要60左右,目前最新版本是KK5.5,与其他飞控相比,KK飞控只有一个低端的陀螺仪而且不含加速度计,因此不能实现自稳,但价格低廉是其最大的优势,而且支持固定翼模式,很多模友在玩。
KK flycam是韩国的模友在KK的基础上开发的,添加了加速度计,用了更好一点的陀螺仪,因此能实现自稳,价格为145美元,目前国内卖得一般是其山寨版本,功能差不多,只有280左右。
EAGLE N6是国内一个团队刚刚研发的,使用的AVR单片机且效果很不错,支持8种飞行模式,每次启动只需要将拨码开关拨至指定模式就完成了模式的切换,且其288元的价格得到了很多模友的追捧,美中不足的是其没有加速度计,不能实现自稳,航拍性能不好。
/item.htm?id=12801941326玉兔飞控也是近期比较热门的一种飞控,由国外模友研发,采用ARM处理器,售价为288元,性价比较高。
功能特点:•主处理器,ARM32位,主频50MHZ•可以支持140g的mini小4轴,要知道小4轴比大4轴更“贼”哦。
•板载高精度数字3轴陀螺仪和3轴加速度计,实现自动稳定和自动平衡。
•8路接收通道,除了主要的4个摇杆通道外,还可以定义辅助开关通道或云台控制通道。
APM飞控系统详细介绍

APM飞控系统详细介绍APM飞控系统的硬件部分主要由处理器、传感器模块和扩展模块组成。
处理器采用32位的ARM Cortex-M4内核,性能强大,能够处理复杂的算法和控制逻辑。
传感器模块包括加速度计、陀螺仪、磁力计、气压计等,用于测量无人机的姿态、运动状态和环境参数。
扩展模块可以根据具体需求增加,如GPS模块、无线通信模块等,可以实现定位和遥控功能。
APM飞控系统的软件部分主要由固件和地面站软件组成。
固件是嵌入在硬件中的软件程序,实现了飞行控制算法和导航功能。
固件基于开源协议发布,可以在开源社区中进行开发和修改。
地面站软件是一款PC端软件,用于与无人机通信、调试和飞行参数的设置。
地面站软件支持Windows、Mac和Linux等多个操作系统,用户可以通过USB或无线通信与飞控系统进行交互。
APM飞控系统具有多种飞行模式,包括手动模式、稳定模式、定高模式、定点模式、自动模式等。
手动模式下,飞行员可以通过遥控器直接控制飞行器的姿态和运动。
稳定模式下,飞控系统会自动控制飞行器保持平稳飞行。
定高模式下,飞行器会自动控制飞行高度,保持稳定飞行。
定点模式下,飞行器会自动控制飞行位置,保持固定的坐标。
自动模式下,飞行器会根据用户设置的任务点和航线自主飞行。
APM飞控系统还支持一系列高级功能,如航点导航、飞行轨迹规划、跟踪目标、自主避障等。
航点导航功能可以实现无人机按照预设的航点序列自主飞行。
飞行轨迹规划功能可以根据用户设置的起始点和目标点规划最优飞行路径。
跟踪目标功能可以通过视觉或无线信号识别目标物体并进行跟踪飞行。
自主避障功能可以根据传感器获取的环境信息进行障碍物的避让。
这些高级功能大大增强了无人机的自主性和智能性。
总之,APM飞控系统是一款功能强大、灵活可扩展的飞行控制系统。
它广泛应用于无人机领域,可用于各种类型的飞行器,包括多旋翼、固定翼和垂直起降等。
作为开源项目,APM飞控系统吸引了众多开发者和爱好者的参与,形成了庞大的用户社区,用户可以从社区获取和共享各种有用的资源和经验。
就我拥有的四轴飞控做一个比较(KK、MWC、玉兔、FF)

就我拥有的四轴飞控做⼀个⽐较(KK、MWC、⽟兔、FF)我之前从未飞过直机,先后飞过的四轴飞控有KK、⽼乔牌MWC、⽟兔、FF,现在就这四款飞控作⼀下个⼈的使⽤测评。
KK是我⼊门四轴的第⼀块飞控,可以这么说,⾃从MR将KK的暴利打成了原形,才有了今天多旋翼的如此流⾏。
我先后⼀共拥有过六块KK,第⼀块KK是168元买的散件,后来承蒙某商家搞活动,送了我5⽚KK的PCB空板,我⾃购元件,焊出了五板:em00: 。
KK的使⽤确实⽐较简单,调试也⾮常简便,这才让我对四轴彻底的⼊了迷,但KK由于没有⾃稳功能,导致了多次在飞远后或有风天因为看不清姿态⽽炸机收场。
初飞KK时,我创下了⼀块电池的飞⾏内炸了⼋⽀桨的纪录,⼀个星期炸了100元的时候的1045正反桨还很贵,⼀⽀5块5,炸起来真是⾁痛:em17: 。
后来⼊了LAMA桨,炸桨再也不⼼痛了。
还引领了⼀次LAMA桨的风潮,导致淘宝上的某商家⼀天销售LAMA桨数千⽀的热潮:em15:的总结是:便宜、调试简单、升级固件⽅便、⽀持单轴到N轴的飞⾏模式,但功能⽐较少,是带领⼴⼤模友⼊门四轴的功⾂。
并且始终感觉KK是练技术的第⼀选择。
对KK的总结后来⼊⼿了⽼乔的MWC飞控,第⼀次体会到了⾃稳的乐趣,只要⼀松杆,飞机马上就能恢复到⽔平状态,感觉真是太爽了,也体会到了罗盘的作⽤,只要罗盘⼀开,⽅向就能锁得死死的,但⽓压定⾼,感觉从来没有⽣效过,感觉应该是定⾼的算不过MWC的调试确实很难,有时候不怎么调,都能好飞得不得了,有时候却会很难飞,所幸的是,⽼乔的售后做的⾮常好,经常半夜帮我远程调机,并且⽼乔也有详细的教程。
但估计由于MWC的作者是国外的,有时很难正确理解到MWC原作者件的PID也没有⼀个很好的理解,我们的意见也⽆法得到作者的⽀持。
后来MWC也有了CF功能,由于我的飞控寄回给⽼乔升级了,现在新的机架还没有,⼀直没有真正的体会过。
对MWC总结总结:调试⽐较⿇烦,调试好了,⾮常好飞;英⽂好的模友,可以看看官⽹,可能会有⽐较⼤的收获;⽓压定⾼效果⼀般;⽼乔的服务很好;那份教程是⽬前见过最详细的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
国内外几款比较好的飞控产品
(1)零度智控的YS09飞控套件
主要参数:
开发板硬件资源介绍
电源芯片LM2596-5,允许输入7~20V电压,为电路板提供稳
定5V;LM2677,为舵机、接收机提供6V电压,统
一供电。
中央处理器CPU ATMEL公司的AT91RM9200,工业级,主频200MHZ。
外部动态存储器1片SDRAM,HY57V641620E。
FLASH 1片512K的DATAFLASH;可扩充32M的FLASH,
RC28F320J3C-125。
串口4个全双工串口,包含1个DBG口。
调试及下载接口一个标准10芯JTAG口。
FPGA ALTERA公司的CYCLONE系列EP1C3T100。
LED指示灯两个贴片LED,可由程序及FPGA代码控制点亮与熄
灭。
GPS模块UBLOX的LEA-4S,支持4HZ刷新率。
压力计
集成IMU 两个MS5534A气压传感器,数字SPI总线,精度0.1mba,可获得气压高度与空速。
Analog Devices公司新推出的3轴加速度计与3轴陀螺仪集成器件ADIS16355,IMU整体解决方案,消除正交误差。
电压转换芯片一片AD7998,8个独立通道,12位转换精度,TWI
总线。
其它留有系统扩展接口,输出到舵机的信号全部由驱动
芯片74LVC16245进行了隔离。
图13 YS09飞控正视图
图14 YS09飞控后视图
(2)北京普洛特无人飞行器科技有限公司的UP30/40飞控系统
UP30性能参数:
集成3轴MEMS加速度计、速率陀螺,GPS,空速传感器,及更高精度的全数字气压高度计
供电范围扩展为4~26V,很多电动飞机的动力电可以直接给其供电
体积相对UP20更小巧,仅为40X100X12mm3,重量26g
外部接口和任务功能灵活且可以定制
可内置3轴电子罗盘,支持3轴云台控制
具备GPS/INS惯性导航功能,满足在丢星情况下返回起飞点
舵机扩展到10~24个,分别可以执行飞行控制和其他任务
支持国产低速通讯电台(最低波特率至1200bps),使得通讯距离更远、更可靠、误码率更低 2~6个10位AD,1路16位AD,充分满足任务数据采集需求
大气数据探测能力,可以观测大气温压湿,以及风向风速
具备UP20所具备的定时定距以及定点的航拍功能
具备2路转速监测,特别适合于双发动机的无人机、无人飞艇的转速监测
新的电气停车功能支持除了原来的磁电机发动机(如小松系列),还支持CDI点火的发动机(如3w等)
支持全自动伞降;可连接超声波高度传感器实现全自动的滑跑降落,只需要在地面站上指定降落点与方向以及左右盘旋,飞控自动推算下滑航线。
支持各种起飞方式的全自动起飞
使用新一代GPS模块,50通道,具备-160dB的接收灵敏度,冷启动定位仅需要29秒,具备GPS、GALILEO、SBAS等多重定位源定位能力。
软件设定,支持24个方向的安装
软件设定使用接收机类型或者无接收机
更大的照片pos数据容量,2978张
图15 UP30及其配套的500mw数传电台
(3)北京航空航天大学研发的iFLY40飞控
iFLY40是北京航空航天大学自行研制的具有自主知识产权的新一代自动驾驶仪。
iFLY40内部集成了三轴MEMS陀螺仪、三轴MEMS加速度计、微型气压高度计、微型空速传感器、微型磁通门、微型GPS接收机等,功能齐全,性能与国外同类产品相当。
而且iFLY40通过捷联解算可以实时测量出飞机的三轴航姿,从而能够实现类似大中型无人机的精确姿态控制,这是绝大多数同类产品所不具备的功能。
iFLY40还有一个特点是可以实现系统软硬件的重新定制,使之更适合于某种特定的飞行平台或任务,这是国外同类产品无法比拟的。
主要特点:
◆集成GPS接收机、三轴MEMS陀螺和三轴MEMS加速度计、气压高度计和气压空速计、数字磁罗盘
◆双ARM7TDMI内核CPU,分离的任务导航和飞行控制计算
◆16通道GPS接收机,4Hz输出,35秒快速定位时间,2.5米CEP精度
◆三维航迹和航速保持,多种航迹跟踪模式选择
◆基于捷联姿态解算和双矢量姿态解算的数据融合,在稳定控制的基础上实现姿态控制◆反馈PID和前馈式控制算法,保证良好的飞行姿态
◆由混合分配表输出舵面舵机,可方便的设置混控和调整中位
◆包含电子地图功能的地面站软件,可在线更改航线和任务,可实时进行半自主式遥控,并可以实时记录飞行数据和离线回放
◆包含路由能力的通讯服务,可以方便的形成无人机组网系统,且协议对用户开放
◆独立的手动/自动切换模块,更好的可靠性和可用性,兼容所有常见RC设备,并提供
RC遥控超距监测和保护功能
◆可在线调整和保存所有控制参数,附带使用方便的独立式参数调整软件
◆可实时遥测飞行状态数据,自动驾驶仪内部的在线数据记录时间可达6.8小时(所有遥测数据全部记录)
◆包含主电源电压过低、舵机电压过低、GPS定位精度过低、高度过低、高度过高、速度过低、姿态超限、用户自定义等各种特殊情况下的应急处理机制
◆支持RS-485、RS-422、RS-232、TTL电平等多种接口的数据链路
◆体积仅70×35×35mm,重量仅57g,功耗仅160mA @ 7.2V
图16 iFLY40飞控盒
图17 iFLY40专业板内核电板
(4)加拿大Micropilot公司MP2028飞控
加拿大Micropilot的自动驾驶仪: MP2028, MP2128, MP2128Heli 世界上最小的自动驾驶仪,集成了无人机自动驾驶仪的全部功能,性能非常优越。
特点:
·体积小、重量轻
·调试方便,简单
·自带超声波高度传感器,能垂直起飞、降落
应用:
·航模无人机自主飞行试验
·小型测绘无人机航拍
规格:
重量28g(包括GPS接收机,陀螺仪及所有的传感器)
电流消耗(包括GPS接收机,陀螺,所有的产感器和
GPS天线
140mA @ 6.5V
供电电压 4.2到26V
长-宽-高10-4-1.5cm
支持现场软件升级
图18 MP2028飞控
(5)美国 UAV Flight Systems 公司AP50飞控
1. 自动驾驶仪的规格
●主板全重:45 克
●外形尺寸:140×48×25 毫米
●主板功耗:6.0 VDC 120 毫安
●最大速度:1275 公里/小时
●最大高度:5000 米
●破坏过载:100 G
●工作温度:-20 至+85 摄氏度
●环境湿度:95%(非凝结)
2. 自动驾驶仪的特性
●8 路PID 飞行控制通道和一路PID 航线跟踪通道
●副翼、升降舵、油门、方向舵和襟翼五个操纵舵面
●全电子调谐传感器:俯仰陀螺、滚转陀螺、偏航陀螺、两轴
8. 电动飞机控制功能
AP50 驾驶仪具有支持电动飞机的功能,当系统电压低于设定值
时,将自动关闭电动机并禁止其重新启动,为降落过程保存电力储备。
9. 模数记录器
AP50 提供了二个8 位的A / D 模数记录通道,用于记录机载仪
器的模拟数据。
8K 的缓存如果专门记录模拟数据,记录时间可长达一个小时。
10. 安装和附件
AP50 驾驶仪装有传感器的一端指向机头方向安装,GPS 天线应安装在机身顶部;空速管探头用软管与AP50 的空速传感器连通;RC接收机使用随机提供的专用电缆与AP50 连接;其它线束可使用专门的连接器分别与舵机和电源等设备连接。
图19 AP50 飞控
温馨提示:最好仔细阅读后才下载使用,万分感谢!。