怎样计算不完整缓和曲线起点及终点的坐标及切线方位角资料
匝道等不完整缓和曲线计算解释和说明
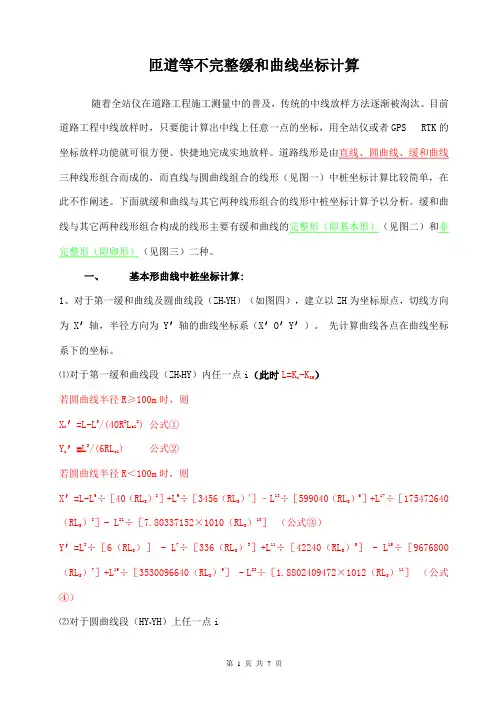
匝道等不完整缓和曲线坐标计算随着全站仪在道路工程施工测量中的普及,传统的中线放样方法逐渐被淘汰。
目前道路工程中线放样时,只要能计算出中线上任意一点的坐标,用全站仪或者GPS RTK的坐标放样功能就可很方便、快捷地完成实地放样。
道路线形是由直线、圆曲线、缓和曲线三种线形组合而成的,而直线与圆曲线组合的线形(见图一)中桩坐标计算比较简单,在此不作阐述。
下面就缓和曲线与其它两种线形组合的线形中桩坐标计算予以分析。
缓和曲线与其它两种线形组合构成的线形主要有缓和曲线的完整形(即基本形)(见图二)和非完整形(即卵形)(见图三)二种。
一、基本形曲线中桩坐标计算:1、对于第一缓和曲线及圆曲线段(ZH~YH)(如图四),建立以ZH为坐标原点,切线方向为X′轴,半径方向为Y′轴的曲线坐标系(X′O′Y′)。
先计算曲线各点在曲线坐标系下的坐标。
⑴对于第一缓和曲线段(ZH~HY)内任一点i(此时L=Ki-KZH)若圆曲线半径R≥100m时,则X i ′=L-L5/(40R2Ls12) 公式①Y i ′=L3/(6RLs1) 公式②若圆曲线半径R<100m时,则X′=L-L5÷[40(RLS )2]+L9÷[3456(RLS)4]–L13÷[599040(RLS)6]+L17÷[175472640(RLS )8]- L21÷[7.80337152×1010(RLS)10](公式③)Y′=L3÷[6(RLS )] - L7÷[336(RLS)3]+L11÷[42240(RLS)5] - L15÷[9676800(RLS )7]+L19÷[3530096640(RLS)9] - L23÷[1.8802409472×1012(RLS)11](公式④)⑵对于圆曲线段(HY~YH)上任一点iX i ′=q+Rsin¢iY i ′=R(1-cos¢i)+pL=Ki-KZH¢i=(L- Ls1)*180/(Rπ)+β内移值P=Ls12/(24R)切线增值q= Ls1/2- Ls13/(240R2)综合⑴、⑵,根据不同坐标系的相互转换,可得ZH~YH上任一点i的中桩测量坐标为:X i =XZH+cosA×Xi′-sinA×f×Yi′(公式⑤)Y i = YZH+sinA×Xi′+cosA×f×Yi′(公式⑥)式中f为线路的转向系数,右转时f=1,左转时f=-1 。
不完整缓和曲线的大地坐标计算
第5期(总第144期)2001年10月山西交通科技SHANX I SC IENCE &TECHNOLOG Y OF COMM UN I CAT I ONS No .5Oct.收稿日期:2001206228;修回日期:2001209201作者简介:武胜兵(1969- ),男,山西清徐人,副主任,工程师,1991年西安公路学院本科毕业。
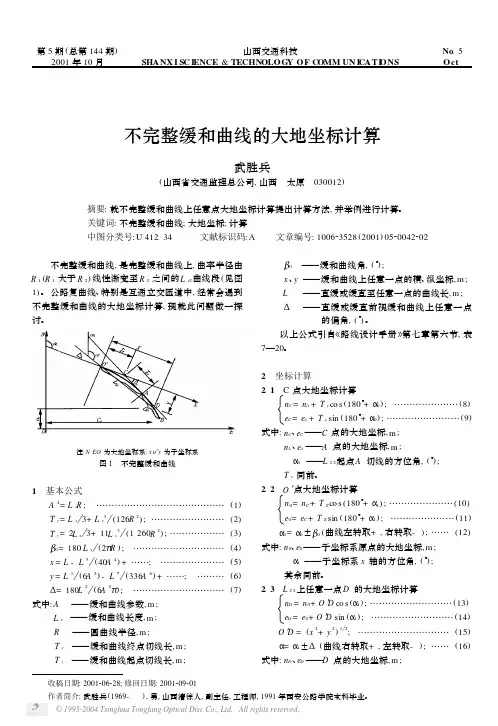
不完整缓和曲线的大地坐标计算武胜兵(山西省交通监理总公司,山西 太原 030012) 摘要:就不完整缓和曲线上任意点大地坐标计算提出计算方法,并举例进行计算。
关键词:不完整缓和曲线;大地坐标;计算中图分类号:U 412.34 文献标识码:A 文章编号:100623528(2001)0520042202 不完整缓和曲线,是完整缓和曲线上,曲率半径由R 1(R 1大于R2)线性渐变至R 2之间的L s 2曲线段(见图1)。
公路复曲线、特别是互通立交匝道中,经常会遇到不完整缓和曲线的大地坐标计算,现就此问题做一探讨。
注:N EO 为大地坐标系;x o ′y 为子坐标系图1 不完整缓和曲线1 基本公式A 2=L s R ;(1)……………………………………T y =L s3+L s 3 (126R 2);(2)……………………T z =2L s3+11L s 3 (1260R 2);(3)………………Β0=180L s (2ΠR );(4)…………………………x =L -L 5(40A 4)+……;(5)…………………y =L 3(6A 2)-L 7 (336A 6)+……;(6)………∃=180L 2(6A 2Π);(7)…………………………式中:A ——缓和曲线参数,m ;Ls——缓和曲线长度,m ;R ——圆曲线半径,m ;T y ——缓和曲线终点切线长,m ;T z——缓和曲线起点切线长,m ;Β0 ——缓和曲线角,(°);x 、y ——缓和曲线上任意一点的横、纵坐标,m ;L ——直缓或缓直至任意一点的曲线长,m ;∃ ——直缓或缓直前视缓和曲线上任意一点的偏角,(°)。
圆曲线、缓和曲线、竖曲线、非完整缓和曲线计算程序
圆曲线、缓和曲线、竖曲线、非完整缓和曲线计算培训1、圆曲线计算程序:“X0”?P 曲线起点X坐标“Y0”?Q 曲线起点Y坐标“X1”?X 曲线交点X坐标“Y1”?Y 曲线交点Y坐标“QDLC”?Z 曲线起点桩号“R”?R 曲线半径“L1R2”?O 曲线前进方向:左为1、右为2Lbl 0“1N-X,2X-N”?S 1为大转小、2为小转大Pol(P-X,Q-Y):ClsJ+180→K 曲线切线方位角计算If S=1:Then Goto 1:Else Goto 2:IfEndLbl 1“N”?U:“E”?V 测量的大坐标(U-P)cos(K)+(V-Q)sin(K)+Z→Z[1]:(V-Q)cos(K)-(U-P)sin(K)→Z[2] If O=1:Then -R→D:Else R→D:IfEndtan-1((Z[1]-Z)/Abs(D-Z[2]))→Z[3]Abs(D)sin(Z[3])+Z →Z[4]:Abs(D)(1-cos(Z[3])) →Z[5]If O=1:Then –Z[5]→Z[5]:Else Z[5]→Z[5]:IfEndPol(Z[4]-Z,Z[5]-D):ClsJ+180 →Z[6]Z+Z[3](Abs(D)π)/180→Z[7](Z[1]-Z[4])cos(Z[6])+(Z[2]-Z[5])sin(Z[6]) →Z[8]If O=1:Then –Z[8]→Z[8]:Else Z[8]→Z[8]:IfEnd“X=”:Z[7]◢计算后的X小坐标“Y=”:Z[8]◢计算后的X小坐标Goto 0Lbl 2“X”?U:“Y”?V 测量的小坐标180(U-Z)/(Rπ)→Z[1]:Rsin(Z[1])+Z→Z[2]:R(1-cos(Z[1]))→Z[3]If O=1:Then –Z[3]→Z[3]:–V→C:–R→D:Else Z[3]→Z[3]:V→C:R→D:IfEnd Pol(Z[2]-Z,Z[3]-D):ClsJ+180→Z[4]Z[2]+Ccos(Z[4])→Z[5]:Z[3]+Csin(Z[4])→Z[6]P+(Z[5]-Z)cos(K)-Z[6]sin(K)→Z[7]Q+(Z[5]-Z)sin(K)+Z[6]coc(K)→Z[8]“N=”:Z[7] ◢计算后的X大坐标“E=”:Z[8]◢计算后的Y大坐标Goto 02、缓和曲线计算程序:“X0”?P 曲线起点X坐标“Y0”?Q 曲线起点Y坐标“X1”?X 曲线交点X坐标“Y1”?Y 曲线交点Y坐标“ZHZH”?Z 曲线起点桩号“R”?R 圆曲线段半径“L”?L 缓和曲线单边曲线长度“L1R2”?O 曲线前进方向左为1右为2Lbl 0“LCZH”?F 测量里程Abs(F-Z)→BIf B<L:Then Goto 1:Else Goto 4:IfEnd 缓和段及圆曲线段计算转换Lbl 1180B2/(2RLπ)→A:RL/B→E:B-B5/(40R2L2)+B9/(3456R4L4)- B13/(599040R6L6)+ B17/(175472640R8L8)- B21/(7.80337152*1010R10L10)→C (红色的为计算小半径增加精度)B3/(6RL)-B7/(336R3L3)+B11/(42240R5L5)- B15/(9676800R7L7)+ B19/(3535596640R9L9)- B23/(1.8802409472*1012R11L11)→D:C-Esin(A) →G(红色的为计算小半径增加精度)If O=1:Then Goto 2:Else Goto3:IfEndLbl 2-D→D:D-Ecos(A) →HGoto 7D→D:D+Ecos(A) →HGoto 7Lbl 4180(B-L/2)/(Rπ)→A:L/2-L3/(240R2)→E:L2/(24R)-L4/(2688R3)→M E+Rsin(A) →C:C-Rsin(A) →GIf O=1:Then Goto 5:Else Goto 6:IfEndLbl 5-(M+R(1-cos(A)) →D:D-Rcos(A) →HGoto 7Lbl 6M+R(1-cos(A)) →D:D+Rcos(A) →HGoto 7Lbl 7Pol(P-X,Q-Y):ClsJ+180→KP+Ccos(K)-Dsin(K) →Z[2]:Q+Csin(K)+Dcos(K) →Z[3]P+Gcos(K)-Hsin(K) →Z[4]:Q+Gsin(K)+Hcos(K) →Z[5]Pol(Z[2]-Z[4],Z[3]-Z[5]):ClsJ+180→Z[1]“U”?U:“V”?V 测量所得大地坐标(U-Z[2])cos(Z[1])+(V-Z[3])sin(Z[1]) →Z[6](V-Z[3])cos(Z[1])-(U-Z[2])sin(Z[1]) →Z[7]If F>Z:Then Goto 9:Else Goto A:IfEndLbl 9If O=1:Then Z[7]→Z[7]:-Z[6]→Z[6]:Else –Z[7]→Z[7]:Z[6]→Z[6] IfEndGoto BLbl AIf O=1:Then –Z[7] →Z[7]:Z[6] →Z[6]:Else Z[7] →Z[7]:-Z[6] →Z[6] IfEndGoto BLbl B“X=”:Z[7] ◢计算后轴线X坐标“Y=”:Z[6] ◢计算后轴线X坐标“0→Goto 0,1→BZZB”?S 0为还回计算过程、1为进行轴线坐标计算大坐标If S=0:Then Goto 0Else Goto 8:IfEndLbl 8“X”?T:“Y”?WIf F>Z:Then Goto C:Else Goto D:IfEndLbl CIf O=1:Then T→Z[8]:-W→Z[11]:Else -T→Z[8]:W→Z[11]:IfEndGoto ELbl DIf O=1:Then -T→Z[8]:W→Z[11]:Else T→Z[8]:-W→Z[11]:IfEndGoto ELbl EZ[2]+Z[11]cos(Z[1])-Z[8]sin(Z[1]) →Z[9]Z[3]+Z[11]sin(Z[1])+Z[8]cos(Z[1]) →Z[10]“N=”:Z[9] ◢计算后X大坐标“E=”:Z[10] ◢计算后Y大坐标Goto 03、竖曲线计算程序:“ZH1”?A 交点1桩号“H1”?B 交点1高程“ZH2”?C 交点2桩号“H2”?D 交点2高程“ZH3”?E 交点3桩号“H3”?F 交点3高程“R”?R 曲线半径(D-B)/(C-A) →Z[1]:(F-D)/( E-C) →Z[2]:Z[2]-Z[1] →W:Abs(RW/2)→T Lbl 0“ZHC”?G:“HC”?H 测量桩号及高程If G≤(C-T):Then Goto 1:Else Goto 2:IfEndLbl 1H-(G-A) Z[1]-B →Z[3]“H+-”:Z[3] ◢计算值+为向下、-为向上Goto 0Lbl 2If G≥(C+T):Then Goto 3:Else Goto 4:IfEnd Lbl 3H-(G-C) Z[2]-D→Z[3]“H+-”:Z[3] ◢计算值+为向下、-为向上Goto 0Lbl 4(G-(C-T))2/(2R) →Z[4](G-A) Z[1]+B →Z[5]If W>0:Then Goto 5:Else Goto 6:IfEndLbl 5H-(Z[5]+Z[4]) →Z[3]“H+-”:Z[3] ◢计算值+为向下、-为向上Goto 0Lbl 6H-(Z[5]-Z[4]) →Z[3]“H+-”:Z[3] ◢计算值+为向下、-为向上Goto 0非完整缓和曲线计算起点和交点方向大坐标Lbl 0“X1”?A 非完整缓和曲线起点X坐标“Y1”?B 非完整缓和曲线起点Y坐标“X2”?C 非完整缓和曲线终点X坐标“Y2”?D 非完整缓和曲线终点Y坐标“A”?E 缓和曲线A值“R”?F 缓和曲线半径“L1”?G 图纸标注缓和曲线长度“L1R2”?R 方向左1右2E2÷F→H 缓和曲线完整计算长度H-G→K 缓和曲线打断长度K-K5÷(40×E4)+K9÷(3456×E8) -K13÷(599040×E12)+K17÷(175472640×E16)-K21÷(78033715200×E20) →LK3÷(6×E2)-K7÷(336×E6)+K11÷(42240×E10)-K15÷(9676800×E14)+K19÷(3530096640×E18)-K23÷(1880240947200×E22) →MH-H5÷(40×E4)+H9÷(3456×E8) -H13÷(599040×E12)+H17÷(175472640×E16)-H21÷(78033715200×E20) →NH3÷(6×E2)-H7÷(336×E6)+H11÷(42240×E10)-H15÷(9676800×E14)+H19÷(3530096640×E18)-H23÷(1880240947200×E22) →OTan-1((O-M)÷(N-L))→PPol(A-C,B-D)J+180→QIf R=1Then Q+P→SElse Q-P→SIfEndAbs(Lcos(S)-Msin(S)-A) →TAbs(Lsin(S)-Mcos(S)-B) →UT+100cos(S) →VU+100sin(S) →W“A0”:T◢完整缓和曲线原点X坐标计算值“B0”:U◢完整缓和曲线原点Y坐标计算值“A1”:V◢完整缓和曲线交点方向X坐标计算值“B1”:W◢完整缓和曲线交点方向Y坐标计算值Goto 0。
公路工程测量放线圆曲线、缓和曲线(完整缓和曲线、非完整缓和曲线)计算解析
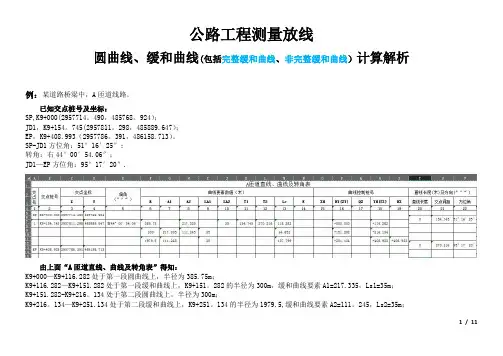
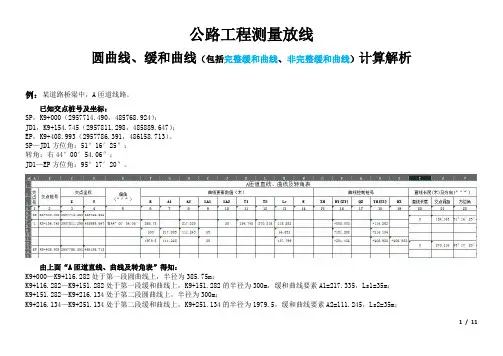
公路工程测量放线圆曲线、缓和曲线(包括完整缓和曲线、非完整缓和曲线)计算解析例:某道路桥梁中,A匝道线路。
已知交点桩号及坐标:SP,K9+000(2957714。
490,485768。
924);JD1,K9+154。
745(2957811。
298,485889.647);EP,K9+408.993(2957786。
391,486158.713)。
SP-JD1方位角:51°16′25″;转角:右44°00′54.06″;JD1—EP方位角:95°17′20″.由上面“A匝道直线、曲线及转角表”得知:K9+000—K9+116.282处于第一段圆曲线上,半径为385.75m;K9+116.282—K9+151.282处于第一段缓和曲线上,K9+151。
282的半径为300m,缓和曲线要素A1=217.335,Ls1=35m;K9+151.282-K9+216。
134处于第二段圆曲线上,半径为300m;K9+216。
134—K9+251.134处于第二段缓和曲线上,K9+251。
134的半径为1979.5,缓和曲线要素A2=111。
245,Ls2=35m;1 / 11K9+251。
134—K9+408.933处于第三段圆曲线上,半径为1979。
5m。
求:K9+130、K9+200、K9+230、K9+300的中桩坐标,切线方位角,左5米边桩的坐标,右10米边桩的坐标。
解:首先,我们知道要求一个未知点的坐标,必须知道起算点坐标,起算点至未知点的方位角,起算点至未知点的直线距离,然后利用坐标正算的计算公式,就可以直接求出未知点的坐标.那么,关于圆曲线和缓和曲线(包括完整缓和曲线和非完整缓和曲线)的计算,我们需要知道如何求出起算点至圆曲线或缓和曲线上某点的方位角和直线距离.下面,先列出关于圆曲线和缓和曲线中角度和距离计算的相关公式。
2 / 113 / 11y 轴。
过圆曲线上任意点P 的切线与ZY-JD 相交,夹角(切线角)为β,ZY-P 与ZY —JD 的夹角(弦切角)为α,ZY-P 的弧长为L ,ZY —P 的直线距离为d,圆曲线的半径为R 。
怎样计算不完整缓和曲线起点及终点的坐标及切线方位角资料
通过弧长计算出园心角,通过园心角计算出弦长,以及这段园曲线的弦切角,直线的方位角加上(左转减,右转加)这个弦切角就是弦的方位角,这样就可以求出园曲线的终点(也就是下一段曲线的直缓点)的坐标.怎样计算不完整缓和曲线起点及终点的坐标及切线方位角以上为一条匝道的曲线图及要素表。
第一缓和段长度根据公式c=R*L及C=A*A,图中A=100,R=150,可算出第一缓和段的长度为66.667米。
而HY里程减去YH里程为60.902米。
因此此段缓和曲线是在离其起点5.765米的地方与前段圆曲线相交。
图上标为YH点。
固此YH点并非第一缓和段起点。
第二缓和段也有同样的问题,DZD点亦非第二缓和段终点。
问题:怎样计算第一缓和段真正起点的坐标和第二缓和段真正终点的坐标。
及切线方位角。
本人水平有限,苦苦思索未得其解。
在此劳烦各位同仁给予小弟支援。
不胜感谢!测量路上诚与仁兄们携手同行,让我们的测量之路多一丝欣慰,少一分苦闷。
QQ26889412E-mail: yujuying@ 注:曲线要素表可能看不清楚。
但可以把图片另存为一个文件。
然打开此文件就非常清楚了。
1.计算出Y1H的坐标及方位角;2.计算出过渡段缓和曲线在Y1H点的支距dx,dy及偏角β;3.由Y1H的方位角及偏角β可反算出过渡缓和曲线虚起点的方位角。
4.由Y1H的坐标、dx,dy及方位角可反算出过渡缓和曲线起点的坐标。
(用支距到大地坐标的变换公式反算。
关于不同类型缓和曲线的判断及起点、终点曲率半径的计算方法目前在匝道或线路施工坐标计算中经常遇到缓和曲线,实际中相信有很多测友选择用积木法或叫线元法正反算程序进行线路坐标计算,这就牵涉到线元的起点终点曲率半径判断的问题,一般的直线元,圆曲线元的起点终点半径判断,比较容易,可能令大家感觉麻烦的就是缓和曲线起点终点半径判断问题,缓和曲线有时候判断算对了,有时候却坐标算不对,究其原因,其实问题出于该缓和曲线是否是完整缓和曲线引起的。
公路工程测量放线圆曲线、缓和曲线(完整缓和曲线、非完整缓和曲线)计算解析
公路工程测量放线圆曲线、缓和曲线(包括完整缓和曲线、非完整缓和曲线)计算解析例:某道路桥梁中,A匝道线路。
已知交点桩号及坐标:SP,K9+000(2957714.490,485768.924);JD1,K9+154.745(2957811.298,485889.647);EP,K9+408.993(2957786.391,486158.713)。
SP—JD1方位角:51°16′25″;转角:右44°00′54.06″;JD1—EP方位角:95°17′20″。
由上面“A匝道直线、曲线及转角表”得知:K9+000—K9+116.282处于第一段圆曲线上,半径为385.75m;K9+116.282—K9+151.282处于第一段缓和曲线上,K9+151.282的半径为300m,缓和曲线要素A1=217.335,Ls1=35m;K9+151.282—K9+216.134处于第二段圆曲线上,半径为300m;K9+216.134—K9+251.134处于第二段缓和曲线上,K9+251.134的半径为1979.5,缓和曲线要素A2=111.245,Ls2=35m;1 / 11K9+251.134—K9+408.933处于第三段圆曲线上,半径为1979.5m。
求:K9+130、K9+200、K9+230、K9+300的中桩坐标,切线方位角,左5米边桩的坐标,右10米边桩的坐标。
解:首先,我们知道要求一个未知点的坐标,必须知道起算点坐标,起算点至未知点的方位角,起算点至未知点的直线距离,然后利用坐标正算的计算公式,就可以直接求出未知点的坐标。
那么,关于圆曲线和缓和曲线(包括完整缓和曲线和非完整缓和曲线)的计算,我们需要知道如何求出起算点至圆曲线或缓和曲线上某点的方位角和直线距离。
下面,先列出关于圆曲线和缓和曲线中角度和距离计算的相关公式。
2 / 113 / 11y 轴。
过圆曲线上任意点P 的切线与ZY —JD 相交,夹角(切线角)为β,ZY —P 与ZY —JD 的夹角(弦切角)为α,ZY —P 的弧长为L ,ZY —P 的直线距离为d ,圆曲线的半径为R 。
不完全缓和曲线计算
切线长为 TJDΟO1 = 551868 , TJDΟO2 = 331426 外矢距为 E = 111091 ,曲线 O1 Q = 511994 则主点坐标 O1 (9 4641915 ,4 7711882) ,
意点切线与起点切线夹角 βP (这里称之为不完全缓
和曲线转角) 。如图 1 所示 。
ls1
+
l
=
A2 R
βO1
=
ls21 2A2
βO2
=
ls22 2A2
βO P
=
( ls1 + l) 2 2A2
βP =βOP - βO1
=
( ls1 + l) 2 2A2
-
ls21 2A2
βP
=
l R1
+
l2 2A2
P 在路线测量坐标系中的坐标为 XP = 9 4551162 YP = 4 7501869
上面都是通过电算程序计算所得 。
本文所讨论的内容对于互通立交匝道的设计和施
工放样有很大参考作用 。
通过计算得
图5
β= 63°48′47″4 R2 = 40 , ls = 81 ls1 = 9 , ls2 = 90
+
3
l10 840 R1
A8
-
l11 42 240A10
+
……
如以 R2 小半径建立切线支距坐标系( l 为 P 点到 O2 的曲线长) ,则
β=
l R2
非完整缓和曲线计算实例
非完整缓和曲线计算步骤如下:从此表格可以看出第一段缓和曲线为非完整缓和曲线(因为起始有一定半径而非为无穷大,此非完整缓和曲线的意义就是从完整的缓和曲线截取一段连接直线和圆曲线),所以我们需先计算出虚拟的ZH’点的坐标和方位角,然后用这个ZH’经完整缓和曲线计算的方法来计算此段缓和曲线上的任意点坐标计算坐标前先列出各参数的计算公式切线角β=Li^2/2/R/Ls*(180°/π)(计算方位角用,公式中如果没有*(180°/π)则以弧度显示) 缓和参数A^2=RLs支距坐标Xi=Li-Li^5/40/R^2/Ls^2+Li^9/3456/R^4/Ls^4Yi=Li^3/6/R/Ls-Li^7/336/R^3/Ls^3+Li^11/42240/R^5/Ls^5坐标增量△X=Xicosξ-Yisin ξ△Y=Xisin ξ+Yicos ξ在第一缓和曲线时,ξ为ZH到JD的方位角,曲线左转时Yi为负号带入,右转时以正号代入在第二缓和曲线时,ξ为HZ到JD的方位角,曲线左转时Yi为正号带入,右转时以负号代入备注:Li:所求点弧长(此点至ZH‘的里程距离)R:曲线半径(以接圆曲线的半径为准)Ls:缓和曲线长(此为非完整缓和曲线,以计算出的完整缓和曲线长为准,而不是截取的缓和曲线长)开始计算:1. 先计算出虚拟的ZH’点桩号,因为根据缓和参数公式A^2=RLs,表格中已知缓和参数为90,半径为70所以求得缓和曲线长Ls=A^2/R=90^2/70=115.714,而根据表格知道实际缓和曲线长为110.302,则在起点里程AK0+000之前还有115.714-110.302=5.412M,所以此段缓和曲线的起点里程应为AK -5.4122. 计算切线角根据公式β=Li^2/2/R/Ls*(180°/π)=5.412^2/2/70/115.714*(180°/π)=0°6′12.93″3. 计算虚拟起点ZH‘方位角α,因为此线路为右转,从起点计算曲线任意点方位角时应为加,现在倒过来计算方位角所以为减,由已知条件得知AK0+000方位角为249°5′47.5″,所以虚拟ZH‘的方位角ξ为249°5′47.5″-0°6′12.93″=248°59′34.57″4. 计算虚拟起点ZH‘坐标,Xi=Li-Li^5/40/R^2/Ls^2+Li^9/3456/R^4/Ls^4=5.412-5.412^5/40/70^2/115.714^2+5.412^9/3456/70^4/115.714^4=5.412Yi=Li^3/6/R/Ls-Li^7/336/R^3/Ls^3+Li^11/42240/R^5/Ls^5=5.412^3/6/70 /115.714-5.412^11/42240/70^5/115.714^5=0.0033线路右转,在第一缓和曲线上,则Yi以正号代入△X=Xicosξ-Yisin ξ=5.412*cos(248°59′34.57″)-0.0033*sin(248°59′34.57″)=-1.937△Y=Xisin ξ+Yicosξ=5.412*sin(248°59′34.57″)+0.0033*cos(248°59′34.57″)=-5.0535虚拟起点ZH‘的坐标为(由于虚拟点在线元起点的前面(如果是在第二缓和曲线时虚拟点再线元终点的后面,则还是正常计算,为加上坐标增量)所以计算时应倒过来计算,所以为减去坐标增量)XZH‘=XZH-△X=3275092.037-(-1.937)=3275093.974YZH‘=YZH-△Y=533114.707-(-5.0535)=533119.7615. 现在可以开始由于虚拟点ZH‘来计算此段缓和曲线上的任意点,这里先计算缓和曲线终点HY点的坐标(HY点里程为ZH‘+115.714=AK0+110.302)Xi=Li-Li^5/40/R^2/Ls^2+Li^9/3456/R^4/Ls^4=115.714-115.714^5/40/70^ 2/115.714^2+115.714^9/3456/70^4/115.714^4=108.059Yi=Li^3/6/R/Ls-Li^7/336/R^3/Ls^3+Li^11/42240/R^5/Ls^5=115.714^3/6/ 70/115.714-115.714^7/336/70^3/115.714^3+115.714^11/42240/70^5/115.714 ^5=30.359线路右转,在第一缓和曲线上,则Yi以正号代入△X=Xicosξ-Yisin ξ=108.059*cos(248°59′34.57″)-30.359*sin(248°59′34.57″)=-10.396△Y=Xisin ξ+Yicosξ=108.059*sin(248°59′34.57″)+30.359*cos(248°59′34.57″)=-111.760XHY=XZH‘+△X=3275093.974+(-10.396)=3275083.578YHY=YZH‘+△Y=533119.761 +(-111.760)=533008.001切线角β= Li^2/2/R/Ls*(180°/π)=115.714^2/2/70/115.714*(180°/π)=47°21′23.76″所以HY点方位角为虚拟点ZH’加上(因为线路右转)47°21′23.76″=248°59′34.57″+47°21′23.76″=296°20′58.33″6.接着计算曲线上任意点坐标,方法同上,比如计算AK0+020的坐标(这里的AK0+020实际为AK0+025.412)曲线长Li为25.412,半径R为70,计算如下:Xi=Li-Li^5/40/R^2/Ls^2+Li^9/3456/R^4/Ls^4=25.412-25.412^5/40/70^2/ 115.714^2+25.412^9/3456/70^4/115.714^4=25.408Yi=Li^3/6/R/Ls-Li^7/336/R^3/Ls^3+Li^11/42240/R^5/Ls^5=25.412^3/6/7 0/115.714-25.412^7/336/70^3/115.714^3+25.412^11/42240/70^5/115.714^5= 0.3376线路右转,在第一缓和曲线上,则Yi以正号代入△X=Xicosξ-Yisin ξ=25.408*cos(248°59′34.57″)-0.3376*sin(248°59′34.57″)=-8.7932△Y=Xisin ξ+Yicosξ=25.408*sin(248°59′34.57″)+0.3376*cos(248°59′34.57″)=-23.840X=XZH‘+△X=3275093.974+(-8.7932)=3275085.181Y=YZH‘+△Y=533119.761 +(-23.840)=533095.921切线角β= Li^2/2/R/Ls*(180°/π)=25.412^2/2/70/115.714*(180°/π)=2°17′2.22″所以HY点方位角为虚拟点ZH’加上(因为线路右转)2°17′2.22″=248°59′34.57″+2°17′2.22″=251°16′36.79″。
非完整缓和曲线参数与坐标计算
道路工程测量中非完整缓和曲线参数与坐标计算中建八局第三建设有限公司张涛摘要:在道路工程测量中,非完整缓和曲线的参数、坐标计算和测设是一个常见的难点和重点,掌握其特性及公式推导原理,对从业者非常重要和必要。
关键词:非完整缓和曲线曲线参数计算公式八匝道互通式立交一、概论工程测量学科是一门应用科学,它直接为国民经济建设和国防建设服务,紧密与生产实践相结合。
在大中型建设项目中,工程测量是一项极其重要的、专业性较强的基础性工作。
特别是在道路工程建设中,经常会遇到道路线形较为复杂,线元变化较多的情况,而测量成果的精度高低,直接影响到工程质量的好坏,测量工作的任何一次失误,都可能导致工程施工出现较大的偏差,从而引起工程局部返工甚至报废,并会延误工期,造成巨大地工程损失。
因此,在施工过程中,如何控制好工程测量的施作质量,从而使工程建设顺利优质地完成,是每一个工程测量工作者的首要职责。
当前,全国各地基础设施工程建设快速发展。
在一些高等级公路建设时,既要保证行车的安全性、便捷性和舒适性,保证道路线形平滑流畅,保证道路景观效果,同时又受到地形条件限制,必须最大限度地节约土地资源,所以设计者经常采用较为复杂的平曲线、竖曲线线形设计。
如在作者近期参建的重庆市渝中区环道隧道工程和机场专用快速路工程中,设计者就采用了多条非对称、非完整缓和曲线线形。
特别是机场专用快速路工程的桃子湾互通式立交桥八条匝道(匝道A---匝道H),包含多个非完整缓和曲线线元及小半径(最小半径R=55m)回头曲线。
在上述较为复杂的线形测设中,作者结合非完整缓和曲线特性和理论计算,利用LEICA TS06全站仪后处理软件系统及CASIO fx-5800P计算器,较为精确地进行了施测,计算坐标值与设计逐桩坐标表给定值互差小于2mm。
二、非完整缓和曲线特性及参数计算在直线与圆曲线之间插入的一段半径由∞逐渐变化到R的曲线称做缓和曲线,它的形式有螺旋线(又称回旋线,我国普遍采用)、三次抛物线和双纽线。
缓和曲线的计算步骤概要
缓和曲线的计算步骤在缓和曲线的计算中,首先要判断缓和曲线的完整性。
判断公式为L 0=C/R上式中,L 0为缓和曲线的计算长度,C 为缓和曲线参数,C =A 2,A 也是缓和曲线的一个参数,R 为设计给的缓和曲线起、终点半径中的最小值。
若计算出来的L 0与设计给的缓和曲线长度l 一样,那么该曲线即是完整的,若L 0比设计给的缓和曲线长度要大,那么设计给的缓和曲线就不是完整的。
下面就完整缓和曲线与不完整缓和曲线的计算方法作一个说明。
一、完整缓和曲线的计算方法:完整缓和曲线有一个特征,就是它的起点或终点半径中有一个是无穷大(该点不是ZH 点就一定是HZ 点),我们称的“缓和曲线起点”就从这个半径为无穷大的点开始的。
计算过程如下:1、根据交点(JD )的桩号推求直缓点、缓圆点、曲中点、圆缓点、缓直点的桩号。
有时设计已经给出这些数据。
2、 建立切线坐标系,求曲线中线点的切线坐标。
切线坐标系,即以ZH 点(或HZ )为原点、以该点切线方向为X1轴的坐标系。
为了使第一缓和曲线和第二缓和曲线具有通式,我们在ZH 点和HZ 点采用同样的左手坐标系(图1)。
在缓和曲线段,中线点切线坐标X 1=l -l 5/40C 2+l 9/3456C 4+…Y 1=l 3/6C- l 7/336C 3+l 11/42240C 5+…(1)式中 l 为ZH 或HZ 至所求点的曲线长。
(1)式是第一缓和曲线和第二缓和曲线的计算通式,仅注意在计算第二缓和曲线时计算的方向相反,C 的符号也相反。
在通常情况下,(1)式取前两项即可满足精度要求;但是当曲线半径过小时,必须顾及第三项,例如匝道或试车场以及山区公路可能有这种情况。
3、将中线点的切线坐标转换为施工测量坐标系坐标一条公路(或工程工地)往往采取统一的施工测量坐标系。
我们必须将曲线中线点的切 线坐标X 1 、Y 1,通过平移和旋转转换为施工测量坐标系坐标X 、Y 。
转换公式如下: 将上式展开,即是:X =X 0+X 1COSA 0-Y 1SINA 0Y =Y 0+X 1 SINA 0+Y 1 COSA 0(2)式中 :A 0是过ZH 点的切线方位角,或HZ 点的切线方位角加减180°;X 0、Y 0为ZH 或HZ 的施工测量系坐标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通过弧长计算出园心角,通过园心角计算出弦长,以及这段园曲线的弦切角,直线的方位角加上(左转减,右转加)这个弦切角就是弦的方位角,这样就可以求出园曲线的终点(也就是下一段曲线的直缓点)的坐标.怎样计算不完整缓和曲线起点及终点的坐标及切线方位角以上为一条匝道的曲线图及要素表。
第一缓和段长度根据公式c=R*L及C=A*A,图中A=100,R=150,可算出第一缓和段的长度为66.667米。
而HY里程减去YH里程为60.902米。
因此此段缓和曲线是在离其起点5.765米的地方与前段圆曲线相交。
图上标为YH点。
固此YH点并非第一缓和段起点。
第二缓和段也有同样的问题,DZD点亦非第二缓和段终点。
问题:怎样计算第一缓和段真正起点的坐标和第二缓和段真正终点的坐标。
及切线方位角。
本人水平有限,苦苦思索未得其解。
在此劳烦各位同仁给予小弟支援。
不胜感谢!测量路上诚与仁兄们携手同行,让我们的测量之路多一丝欣慰,少一分苦闷。
QQ26889412E-mail: yujuying@ 注:曲线要素表可能看不清楚。
但可以把图片另存为一个文件。
然打开此文件就非常清楚了。
1.计算出Y1H的坐标及方位角;2.计算出过渡段缓和曲线在Y1H点的支距dx,dy及偏角β;3.由Y1H的方位角及偏角β可反算出过渡缓和曲线虚起点的方位角。
4.由Y1H的坐标、dx,dy及方位角可反算出过渡缓和曲线起点的坐标。
(用支距到大地坐标的变换公式反算。
关于不同类型缓和曲线的判断及起点、终点曲率半径的计算方法目前在匝道或线路施工坐标计算中经常遇到缓和曲线,实际中相信有很多测友选择用积木法或叫线元法正反算程序进行线路坐标计算,这就牵涉到线元的起点终点曲率半径判断的问题,一般的直线元,圆曲线元的起点终点半径判断,比较容易,可能令大家感觉麻烦的就是缓和曲线起点终点半径判断问题,缓和曲线有时候判断算对了,有时候却坐标算不对,究其原因,其实问题出于该缓和曲线是否是完整缓和曲线引起的。
关于这点,相关的课本教材上没有明确的讲述,网上对此问题的解释也是散见于不同的论文著作中,对于测量新手来说,线元法程序是非常适用上手的,但却往往因为遇到不完整缓和曲线的起点或终点的半径判断计算不出来导致坐标计算错误,的确是件令人恼火的事情,在此我就把自己的判断经验做一论述,给用线元法程序的测友们一同分享,当然高手们请一笑而过,也可留下你的经验与大家一起分享交流学习。
第一:先说说完整缓和曲线和不完整缓和曲线以及不对称缓和曲线与对称缓和曲线的概念问题,以免混为一谈. 1.当对于单独一段缓和曲线从其完整与否来讲是分为完整与不完整两类;当对于一个单交点内的两段缓和曲线(即常说的第一缓和曲线和第二缓和曲线而言)又有对称缓和曲线与不对称缓和曲线之分。
由此看来,完整与对称与否是针对缓和曲线两个方面来看待区分的。
2.缓和曲线我们的测量教材上讲述的其实就是完整缓和曲线,也可以知道缓和曲线上:各个点的半径是不同的,起点到终点的半径值过度是从正无穷大到所接圆曲线半径之过度如从ZH向HY方向;或者是从所接圆曲线半径值向正无穷大过度的,如从YH向HZ方向。
那么由此可以不难判断出来,完整缓和曲线就是符合上述特征的,那么不完整的缓和曲线就是不符合上述特征的,但是线路上的平曲线设计时候一般缓和曲线不单独存在的,整体上缓和曲线前或后一般都是要连接一个圆曲线的,那么不完整缓和曲线其实就是在完整缓和曲线上截取的一段,一般就是去掉了半径无穷大的那端而是从某个点开始的半径值向所接圆曲线半径值过度的。
3.对称与不对称缓和曲线是相对于一个单交点内的两段缓和曲线(即常说的第一缓和曲线和第二缓和曲线而言),当两个缓和曲线长度相等时候则称之为对称缓和曲线,自然此时的切线长、缓和曲线参数A值都是相等的,反之不相等就称为不对称缓和曲线,自然切线长、缓和曲线是不相等的。
第二:由此可以看出对于缓和曲线而言,对称与否很容易分辨判断无需赘述,完整与否不易区分,也是这里重点要说的问题.1.完整与不完整缓和曲线的区别判断方法:综上所述,完整缓和曲线与不完整缓和曲线的判断其实就在于验证完整缓和曲线参数方程A^2=R*Ls这个等式成立与否就可。
(A 为已知的缓和曲线参数,R为缓和曲线所接圆曲线的半径,Ls为该段缓和曲线的长度)理论上,当该式子成立时候,那就是完整缓和曲线无疑,当不成立时候那就可判断为不完整缓和曲线了。
实际工作操作时候验证方法如下:先把R*Ls的乘积进行开平方然后看所得到的结果是否与所提供的缓和曲线参数A值相等。
2.完整缓和曲线与不完整缓和曲线起点终点的曲率半径的判断与计算:线路设计上的缓和曲线一般不会单独存在的,连续的缓和曲线起点或终点必定有一端都是要接圆曲线的,那么缓和曲线一端的半径值必定就是圆曲线的半径值了,求半径的问题就变成只需求出另外一端半径就可以了.上面说过首先判断出该缓和曲线是否是完整的办法,那么当是完整缓和曲线时候,起点或终点两端的半径,必定一端是无穷大,一端就是圆曲线半径了;那么当判断是不完整缓和曲线时,一端半径就是圆曲线半径,另一端的半径就绝对不能是无穷大了的,理论上应该是该端点的半径值要小于无穷大而大于所接圆曲线的半径值,那么该怎么求出来呢?此时就牵涉到了不完整缓和曲线的参数方程:A^2=[(R大*R小)÷(R大-R小)]*Ls由上方程可以看出,R大就是我们所需要求的这端半径了,R小自然就是该不完整缓和曲线所接的圆曲线半径了。
A为该不完整缓和曲线参数,R小为所接圆曲线半径,Ls 为该不完整缓和曲线的长度,这些图纸都提供的有了,只需按照上面的不完整缓和曲线的参数方程进行解方程就可得到另一端的半径值了,也就是R大=(A^2*R小)÷(A^2-R小*Ls)就可以的。
只要是正值那就OK了!!!2.很有必要再说说不完整缓和曲线中的一个特例------卵形曲线卵形曲线是不完整缓和曲线中的一种特殊情况,对于卵形曲线的定义是:两端同转向圆曲线中间所夹的那段同转向不完整缓和曲线就叫卵形曲线,也就是指那段缓和曲线前后各有个圆曲线相接,并且三段曲线的转向相同用上述判断复核是那么这段缓和曲线一般都是不完整的那么符合这样特征的就是卵形曲线,那么此时卵形曲线必定是符合不完整缓和曲线的参数方程的:A^2=[(R大*R小)÷(R大-R小)]*Ls那么此时卵形曲线的起点或终点这两端的半径就分别是所接两个圆曲线的半径值!也就是R大和R小.半径值就是无需求的,直接用卵形曲线所接前后两个圆曲线的半径值就可了.其实关于不完整缓和曲线一端半径求算方法这点,在夏夜的“轻松测量系统软件电脑版”的菜单上也就有这个工具,懒得列方程解算的,不妨直接用软件计算也可嘛,我上述只是讲述了下手工计算的方法.至此,对于缓和曲线的特征判断与半径计算应该有个清晰的眉目了吧,那么在使用程序计算线路坐标的时候,遇见缓和曲线就先判断是否完整,然后用上述方法很快就可判断到起点或终点的曲率半径了。
最后解释下,说曲率其实就是半径的倒数,程序中经常见到这个概念,千万不要把曲率和半径混为一谈导致程序计算错误了!以上所述是本人愚见,欢迎各位不吝赐教,共同学习交流,将课本理论与现实实践相结合,正确顺利使用线元法(积木法)坐标计算程序,为坐标计算做好数据准备,从而正确快速的计算出线路坐标,当然也欢迎测友与本人(点击顶部本人名字查看注册信息可找到)联系探讨,合作交流,共同进步!非完整缓和曲线坐标计算方法2009-03-24 11:45非完整曲线:第一缓和曲线和第二缓和曲线的的起点半径为R1 ,不是无穷大。
坐标计算方法:已知,缓和曲线起点Q(半径R1,里程l1,坐标(x1,y1,)).起点的切线坐标方位角a1,求缓和曲线上任意里程l的坐标计算一:先求出缓和曲线上半径为无穷大的点(ZH,曲线中不存在,假设存在)的坐标,再按照缓和曲线的方法计算设Q到ZH点的弧长是DL ,根据缓和曲线特性求非完整缓和曲线的曲线参数 A^2=(R1*R2)*LF(非完整缓和曲线的长度)/(R1-R2)DL=A^2/R1 (R ,圆曲线的半径,Ls 为ZH到HY点的弧长)DL对应的弦长 DLL =DL-dL^5/(90A^4)a2=a1-i*DL^2/2*A^2 (a2 为ZH 点的方位角,dL^2/2*A^2 为转折角) a3=a1+180-i*DL^2/3*A^2 ( a3 为 Q 到ZH点的方位角)(求ZH时:i,右为正,左为负;HZ 相反。
)ZH 点的坐标:X2=X1+dLL*cos(a3)Y2=Y1+dLL*sin(a3)然后根据缓和曲线的方法计算缓和曲线上任意一点的坐标。
卵形曲线:可是说是非完整曲线中半段(即从曲率半径R1 到R2)缓和曲线计算方法二:建立一Q为原点,Q点的切线方位为x轴,垂直与X轴指向半径方向的坐标系,求各点在此坐标系的坐标,再转化到我们用的地方坐标系中。
缓和曲线参数,如上计算则得:缓和曲线上任意里程L点的半径为:r = A^2/(l+DL) 其中 l =L-L1,任意点到Q 点的弧长。
dx=dl*cos b ; dy=dl*sin b b 为 L某点的转折角db=dl/r=(l+DL)/A^2 dl DL :Q 点到ZH点的弧长b= (l^2/2+ DL*l)/A^2=l/R1+l^2/(2*A^2)则得 带入 sin b ,cos b 的展开式,并积分得x = l-l^3(1/6*R1^2-1/24*A^4)-l^4/(8*A^2*R1)+…… y =l^2/2*R1+l^3/(6*A^2)-l^4/(24*R1^3)+…… 然后经过直角坐标转换到我们用的平面坐标系中!一、曲线要素计算已知:JDZH 、JDX 、JDY 、R 、L S1、L S2、L H 、T 、A 1、A 2(L H =L S1+L S2+圆曲线长)1、求ZH 点(或ZY 点)坐标及方位角⎪⎩⎪⎨⎧-=-=-=11sin cos A T JDY ZHY A T JDX ZHX T JDZH ZHZH2、求HZ 点(或YZ 点)坐标及方位角⎪⎩⎪⎨⎧+=+=+-=22sin cos A T JDY HZY A T JDX HZX L T JDZH HZZH H3、求解切线长T 、外距E 、曲线长L(1)圆曲线⎪⎩⎪⎨⎧=-==180/)1)2/cos(/1()2/tan(απααR L R E R T(2)缓圆曲线)2/(2/)2/cos(/)(2180/)2()2/tan()(020R l l l Rl l R p R E l R L q p R T s s s Hs H H ===⎪⎩⎪⎨⎧-+=+⨯-=+⨯+=ββαπβαα时当其中 二、直线上各桩号坐标及方位角计算已知:ZH 、X 、Y 、A⎪⎩⎪⎨⎧+=+==-=A L Y DY A L X DX A T ZHDZH L sin cos 三、第一缓和曲线上各桩号点坐标及方位角计算已知:ZHZH 、ZHX 、ZHY 、A 1、R 、L S1、i (Z+1Y-1)⎪⎩⎪⎨⎧⨯-+=⨯++=⨯⨯-==-=-=1111121132125cos sin sin cos /180)2/()6/()40/(A y i A x ZHY DY A y i A x ZHX DX Rl l i A T Rl L y l R L L x ZHZHDZH L s s s π四、圆曲线上各桩号点坐标及方位角计算已知:ZHZH 、ZHX 、ZHY 、A 1、R 、L S1、i (Z+1Y-1)⎪⎩⎪⎨⎧⨯-+=⨯++=⨯+⨯-=⎪⎩⎪⎨⎧=-==++-=-++=--=1111121231110211231111cos sin sin cos /180)/2/(24/240/2/2/24/)]/2/cos(1[240/2/)/2/sin(A y i A x ZHY DY A y i A x ZHX DX R L R l i A T Rl p Rl l q R l Rl R L R l R y R l l R L R l R x ls ZHZH DZH L s s s s s s s s s s πβ其中五、第二缓和曲线上个桩号坐标及方位角计算已知:HZZH 、HZX 、HZY 、A2、R 、L S2、i (Z+1Y-1)⎪⎩⎪⎨⎧⨯--=⨯+-=⨯⨯+==-=-=2222222232225cos sin sin cos /180)2/()6/()40/(A y i A x HZY DY A y i A x HZX DX Rl l i A T Rl L y l R L L x DZHHZZH L s s s π六、边桩坐标求解已知:DZH 、X 、Y 、T 、BZJL (Z+Y-)、DLJJ 、N (距中桩距离,左正右负) ⎪⎩⎪⎨⎧-=-=+=T N Y BDY T N X BDX T T sin cos α七、纵断面高程计算(1) 直线段上高程计算已知:直线上任一点桩号(ZH )、高程(H )、纵坡(i ))(*ZH DZH i H DH -+=(2) 竖曲线上高程计算已知:竖曲线起点桩号(ZH )、起点高程(H )、竖曲线半径R 、起点坡度(i )、k (凸曲线+1、凹曲线-1))2/(2R l k il H DH ZH DZH l ⨯-+=-=注:JDZH、JDX、JDY:交点桩号、交点X、Y坐标R、L S1、L S2:半径、缓和曲线1、缓和曲线2LH:缓和曲线1长+圆曲线长+ 缓和曲线2长A1、A2:方位角1、方位角2T:在曲线要素中代表切线长;在坐标计算中代表被求解点的坐标方位角。