工位专用机床的设计
四工位专用机床设计-任务书
毕业设计(论文)任务书题目四工位专用机床设计
(任务起止日期2010年11 月日~2011年 6 月日)
应用技术学院机械设计制造及其自动化(数控)专业班
学生姓名学号
指导教师系主任
二级学院院长
注:1、任务书由指导教师填写;2、任务书在第七学期第15周前下达给学生。
学生完成毕业设计(论文)工作进度计划表
注:1、此表由指导教师填写;
2、此表每个学生一份,作为毕业设计(论文)检查工作进度之依据;
3、进度安排用“—”在相应位置画出。
毕业设计(论文)阶段工作情况检查表
注:1、此表由指导教师认真填写(要求手写);
2、“组织纪律”一栏根据学生具体执行情况如实填写;
3、“完成任务情况”一栏按学生是否按进度保质保量完成任务的情况填写;
4、对违纪和不能按时完成任务者,指导教师可根据情节轻重对该生提出警告或不能参加答辩的建议。
机械原理课程设计任务书
机械运动简图设计实例7.1 薄板冲床7.1.l设计要求设计专用冲床,用于金属薄板的冲孔或落料。
7.1.2功能分解显然,为完成冲压工艺过程,需实现下列运动功能要求:(1)冲头作上下往复运动,因此需要设计相应的冲压机构。
(2)板料作纵向步进运动,因此需要设计板料纵向送料机构。
(3)为了节约原材料,工厂往往采用交错冲切方法,这样可以用同样数量的原材料加工出较多的工件,且减少边角余料。
因此,板料在作纵向步进运动的同时,还应作横向停歇往复运动,以实现冲切孔位的交错排列,为此需设计板料横向送料机构。
对这一个机构的运动功能作进一步分析,可知它们分别应该实现下列基本运动:(1)冲压机构有三个基本运动:运动轴线的变换、运动形式的变换、运动方向的交替变换。
(2)板料纵向送料机构也有三个基本运动:运动轴线变换、运动缩小、运动停歇。
(3)板料横向送料机构有四个基本运动:运动形式变换、运动缩小、运动方向的交替变换、运动停歇。
7.3 铆钉冷镦机7.3.1设计要求设计铆钉自动冷镦机,把成卷的线材通过校直、送料、切料、转送、镦锻、起模等工序,制成铆钉。
7.3.2功能分解本机器的功能是自动生产铆钉。
其原理为冷态(室温)镦锻。
它的运动功能可分解为四种工动作:l. 进料金属线材经进料机构校直后,被自动、定时地送入模具。
执行构件作直线停歇运动。
2. 切断转送进料停止后,切断转送机构将棒料切断并把它送至镦料工位。
执行构件作直线停歇等速运动及停歇急回运动。
3. 镦锻成形由镦锻机构镦出铆钉,执行构件作直线往复急回运动。
4. 起模顶料由起模机构将铆钉从定模中推出,执行构件作直线往复停歇运动。
7.4 蜂窝煤成型机7.4.1设计要求蜂窝煤在我国城镇广泛使用。
现要求设计蜂窝煤成形机,将具有一定湿度的粉煤定量送入模腔成形,生产出煤饼。
设计参数为:蜂窝煤形状为圆柱体,成品尺寸:¢100 mm³60 mm;生产能力:40次/min。
7.4.2功能分解为实现蜂窝煤成形,该机应具有下列功能:输入煤粉、煤粉成形、清除煤屑、型煤起模、输出成品。
四工位专用机床设计说明书
四⼯位专⽤机床设计说明书附件:⽬录1.设计任务 (4)1.1 ⼯作原理及⼯艺动作过程 (4) 1.2 原始数据及设计要求 (4)1.3 孔的典型加⼯⼯艺及⼑具 (4)2.功能分解与运动分析 (5)2.1功能分解 (5)2.2 运动分析 (7)3.传动机构选型 (7)4.执⾏机构选型 (8)4.1主轴箱⽅案设计 (9)4.2⼯作台⽅案设计 (10)5.最终⽅案确定 (11)6.机械运动简图 (12)7.机械运动⽅案计算 (12)7.1 运动循环图各区间时间的计算 (12)7.2 减速器的计算 (13)7.3 槽轮的尺⼨计算 (13)总结 (15)参考⽂献: (16)1.设计任务1.1 ⼯作原理及⼯艺动作过程四⼯位机床是在四个⼯位上分别完成相应的装卸⼯件、钻孔、扩孔、铰孔⼯作。
它的执⾏动作有两个:⼀是装有四⼯位⼯件的回转运动;⼆是装有专⽤电动机带动三把专⽤的主轴箱的⼑具转动和⽔平往复移动。
1.2 原始数据及设计要求⑴⼑具顶端离开⼯作表⾯65mm,快速移动送进60mm后,再匀速送进60mm(包括5mm⼑具切⼊量,45mm⼯件孔深,10mm ⼑具切出量,如图①所⽰),然后快速返回。
回程和进程的平均速度之⽐为K=2。
⑵⼑具的匀速给进速度为2mm/s⼯作装卸时间不超过10s。
⑶机床⽣产效率每⼩时约60件。
⑷执⾏机构及传动机构能装⼊机体内。
⑸传动系统电机为交流异步电动机,功率1.5KW,转速960r/min。
图①1.3 孔的典型加⼯⼯艺及⼑具孔的加⼯包括从实体材料上加⼯孔和对已有孔进⾏加⼯两⼤类。
⿇花钻是在实体材料上加⼯孔的常⽤⼑具,加⼯精度较低。
扩孔钻和铰⼑是⽤于对已有孔进⾏加⼯的⼑具。
扩孔钻的外形和⿇花钻相类似,只是加⼯余量⼩,⼑齿数⽬⽐⿇花钻多,加⼯后孔的质量较好,⼀般能达IT10—11级精度。
铰⼑是提⾼被加⼯孔质量的半精加⼯或精加⼯⼑具,切削时加⼯余量更⼩,⼑齿数⽬更多,加⼯后孔的精度最⾼可达IT8。
机械课程设计————四工位机床!强势出击!
机械原理课程设计—————————————————————————————设计题目:院校:专业:班级:姓名:学号:指导老师:日期:目录第一部分:绪论·········································第二部分:设计方案说明································一、机器的功能和设计要求·······························二、方案确定···········································三、功能分解···········································四、选用机构···········································五、运动转换功能图·····································六、机械运动循环图·····································七、用形态学矩阵选择机械运动方案·······················八、方案评价···········································第三部分:设计心得···································参考文献···············································第一部分绪论四工位专用机床是在四个工位上分别完成工件的装卸、钻孔、扩孔、铰孔工作的专用加工设备。
四工位专用机床机构设计
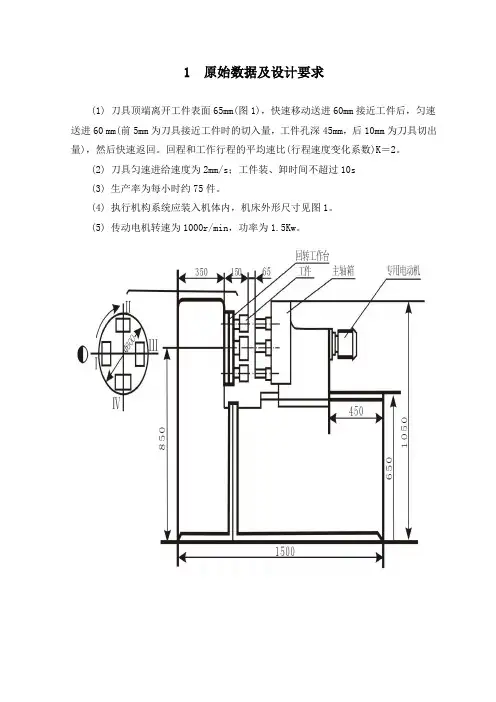
1 原始数据及设计要求(1) 刀具顶端离开工件表面65mm(图1),快速移动送进60mm接近工件后,匀速送进60 mm(前5mm为刀具接近工件时的切入量,工件孔深45mm,后10mm为刀具切出量),然后快速返回。
回程和工作行程的平均速比(行程速度变化系数)K=2。
(2) 刀具匀速进给速度为2mm/s;工件装、卸时间不超过10s(3) 生产率为每小时约75件。
(4) 执行机构系统应装入机体内,机床外形尺寸见图1。
(5) 传动电机转速为1000r/min,功率为1.5Kw。
2 工艺动作分解及机械运动循环圈2.1 工艺动作分解本四工位专用机床主要有两个执行构件——回转工作台和主轴箱。
回转工作台作间歇转动,主轴箱作来回移动。
由生产率可求出一个运动循环所需时间:刀具匀速送进60mm所需时间t30s匀,刀具其余移动内(包括快速送进60mm,快速返回120mm)共需18s。
回转工作台截止时间为36s,因此足够工件的装、卸所需时间。
2.2机械运动循环圈其机械运动循环情况如表所示。
表机械运动循环情况3机构选型和机械运动方案的确定3.1 机构选型四工位专用机床的主轮箱往复移动机构和回传工作台间歇运动机构可由下表所列来选择。
表四工位专用机床机构的选择情况3.2 机械运动方案的确定根据表所列的机构形态矩阵,可以组合成的四工位专用机床的机械运动方案有12种。
不完全齿轮机构冲击性大,容易引起振动;凸轮式间歇运动机构不易定位,需要单独设计都能够为机构;槽轮机构结构简单,又实现了工作台的回转定位,其冲击性相对较小,所以工作台的回转机构采用槽轮机构。
另外,由于两个执行机构之间有严格的运动关系,并且机床主轴箱有确定的运动规律,所以主轴箱往复移动机构选用圆柱凸轮机构,容易保证主轴箱的运动规律。
4 机械传动系统速比和变速机构[11]主驱动电机功率为1.5KW 、转速为1000r /min 。
由生产率要求,主轴箱移动机构和回转工作台间歇运动机构的主动件转速为1.25r /min 。
组合机床主轴箱及夹具设计
组合机床主轴箱及夹具设计摘要:根据设计任务书的要求,本设计说明书针对连杆大小头双端面铣削组合机床的设计及专用夹具设计进行说明。
主要内容包括组合机床工艺方案的制定、组合机床配置型式的选择、组合机床总体设计以及主轴箱设计。
全文主要包括组合铣床的总体设计和主轴箱设计两部分。
机床总体设计主要是在选定工艺方案并确定机床配置形式、结构方案基础上确定“三图一卡”,主轴箱设计根据“三图一卡”,整理编绘出主轴箱原始依据图,重点分析传动系统,经过各种方案的比较,最后确定最优方案。
此外,为了提高劳动生产率,降低劳动强度,保证加工质量,需设计专用夹具。
关键词:主轴箱;组合机床;夹具Combination Machine Tool Spindle boxes andfixture designAbstract:According to designs the project description the request,This design instruction booklet carries on the explanation in view of the connecting rod reducing socket double face milling aggregate machine-tool design and the unit clamp design. Main content including aggregate machine-tool craft plan formulation, aggregate machine-tool configuration choice, aggregate machine-tool system design as well as headstock design.The full text mainly includes combines the milling machine the system design and the headstock designs two parts. The engine bed system design mainly is in the designation craft plan and the determination engine bed disposition form, in the structure plan foundation determined "a three charts card", the headstock design basis "a three charts card", reorganizes the compilation to leave the headstock primitive basis chart, the key analysis transmission system, passes through each kind of plan comparison, finally determines the most superior plan. In addition, in order to enhance the labor productivity, reduces the labor intensity, guaranteed the processing quality, must design the unit clamp.Keyword:headstock ;aggregate machine-tool;jig目录第一章绪论 (1)1.1 组合机床的特点 (1)1.2 组合机床的分类和组成 (1)1.3组合机床的方案选择 (2)第二章组合机床总体描述 (3)2.1 组合铣床工艺方案的制定 (3)2.2 确定切削力、切削功率 (4)2.3 组合机床配置型式的选择 (5)2.4影响总体布置的因素 (5)2.5组合铣床的总体分析——三图一卡 (6)2.5.1被加工零件工序图 (6)2.5.2 加工示意图 (7)2.5.3组合机床联系尺寸图 (10)2.5.4 生产率计算卡 (11)第三章组合机床主轴箱设计 (12)3.1主轴箱设计的原始依据 (12)3.2 运动参数和动力参数的确定 (12)3.2.1 传动系统传动比分配 (12)3.2.2 计算传动装置的运动和设计参数 (12)3.2.3齿轮模数的估算及其叫校核 (13)3.2.4 轴各参数估算及强度校核 (16)3.3主轴箱的坐标计算 (25)第四章组合机床夹具设计 (27)4.1 组合机床夹具概述 (27)4.2 定位支承系统概述 (28)4.2.1定位支承系统 (29)4.2.2夹紧机构 (30)第五章总结 (31)致谢 (32)参考文献 (33)第一章绪论1.1 组合机床的特点组合机床是由大量的通用部件和少量专用部件组成的工序集中的高效率专用机床。
机械原理NO[1]. 24 第十四章 机械传动系统的方案
连杆机构: 四杆机构: 曲柄摇杆机构; 双摇杆机构; 摆动导杆机构; 滑块导杆机构; 多杆机构;
齿条齿轮机构; 摆动推杆凸轮机构; 组合机构;
机械原理
第14章 机械系统的方案设计
(四)能实现往复移动机构:
连杆机构: 四杆机构: 曲柄滑块机构; 正弦机构; 多杆机构;
移动推杆凸轮机构; 齿轮齿条机构; 螺旋机构; 组合机构;
机械原理
第14章 机械系统的方案设计
第14章 机械系统的方案设计
Chapter 14 Project Design of Mechanism System
§14-1 概述
一、机械设计的一般过程
1。计划:提出设计任务,进行可行性研究,编制设计任务书
2。方案设计:选用何种机构以及这些机构如何组成机器才 能完成机器的功能,并对所选机构进行尺寸设计和对方案进 行评价,确定最佳方案。
(五)再现轨迹机构:
连杆机构; 组合机构;
机械原理
第14章 机械系统的方案设计
§14-4 机械的工作循环图
当一台机器有多个执行构件时,这些 执行构件应以一定的次序协调动作,互相 配合,以完成机器预定的功能和生产过程。 这方面的工作称为机械的协调设计。
用来描述各执行构件运动间相互协调 配合的图称为机械工作循环图(也叫机械 运动循环图)。
cdea部分的线路形状不作要求。
机械原理
第14章 机械系统的方案设计
三、原始数据和设计要求(见指导书) 四、设计内容与任务
1。小组内每人拿出两个原始方案,画出机构示意图, 分析优缺点(周一)
2。小组讨论,确定最佳方案(周二)。
3。小组内分工,分别设计最佳方案的机构尺寸:连杆机构、 凸轮机构、齿轮机构、其他常用机构等(周三) 。
四工位专用钻孔机床设计(全套CAD图纸)
四工位专用钻孔机床设计(全套CAD图纸)全套CAD图纸,联系 695132052 第1章绪论1.1 机床的发展与现状金属切削机床是人类在改造自然的长期生产实践中,不断改进生产工具的基础上产生和发展起来的。
最原始的机床是依靠双手的往复运动,在工件上钻孔。
随着加工对象材料的变化和社会的进步,机床的种类也随着增加,功能也越来越多。
近年来,由于新技术的发展并在机床领域得到应用,使机床的发展更加迅猛。
多样化、精密化、高效化、自动化是这一时代机床发展的基本特征。
也就是说,机床的发展紧密迎合社会生产的多种多样和越来越高的要求。
我国的机床工业是在新中国成立后建立起来的。
50多年来,我国的机床工业获得了高速发展。
目前我国已经形成了布局比较合理、比较完善的机床工业体系。
机床的性能也在逐渐提高,有些机床的性能已经接近世界先进水平。
但与世界水平相比,还是有较大的差距。
因此,要想缩短与先进国家的差距,我们必须开发设计出我国自己的高性能机床。
现代金属切削机床的主要发展趋势是:提高机床的加工效率,提高机床的自动化程度以及进一步提高机床的加工精度和减小表面粗糙度值。
1.2 机床的用途及分类钻床是孔加工用机床,主要用来加工外形较复杂,没有对称回转轴线的工件上的孔。
在钻床上加工时,工件不动,刀具作回转主运动,同时沿轴向移动,完成进给运动。
钻床可完成钻孔、扩孔、铰孔等工作。
钻床可分为:立式钻床、卧式钻床、台式钻床、摇臂钻床,深孔钻床及其它钻床等。
本次设计的四工位专用钻孔机床是卧式钻床,四工位专用机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作,如图1.1所示。
它的执行机构有两个:一是装有四工位工件的回转工作台,二是装有专用电动机的带动的三把刀具的主轴箱。
主轴箱每向左移动送进一次,在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作。
当主轴箱右移退回到刀具离开工件后,工作台回转90度,然后主轴箱再次左移。
很明显 ,对某一个工件来图1.1 四工位专用机床执行动作图说,要在四次工作循环后完成装、钻、扩、铰、卸等工序。
机械专业多工位数控钻床设计毕业论文
机械专业多工位数控钻床设计毕业论文【摘要】本文要紧针对形状相对复杂的工件的孔加工工件,现在一样都采纳钻床加工,但随着科技的进展和对制造精度有了更高的要求,因此数控技术成为了主流。
而数控多工位钻床确实是提高钻削加工精度和效率的一种专门好的机加工工具,在满足制造精度的前提下,更是节约了人力、时刻的成本。
在一样情形下,数控钻床就满足需求,而基于采纳西门子数控系统,能完成连续精确的高速钻孔。
相关于传统的数控钻床,该方案能适合较大直径的深孔加工,且还满足加工速度、高精度、高生产效率的要求;运动方式而采纳点位操纵系统,先以较快速度移动到终点邻近位置,再以低速正确移动到终点定位位置,保证了良好的定位精度;而操纵方式那么采纳半闭环操纵系统,该系统通过检测移动部件的位置,然后反馈到数控装置的比较器中,与输入的原指令位置进行比较,用比较后的差值进行操纵,是移动部件补充位置,直到差值交出为止,因此增大了工件的加工精度;【关键词】精度、数控技术、多工位、钻削Design of CNC drilling machine with multi-position progressive die【Abstract】This article which mainly aimed at the shape of the hole of the work pieces those relatively complicated process work pieces. At present,the drilling machine processing have been typically used, but with the development of science and technology and manufacturing precision need the higher request. The numerical control technology became the mainstream. And the numerical control of progressive drilling machine is a kind of very good machining tool to enhance drilling processing precision and efficiency. It not only meets manufacturing precision, but also low the manpower and the time.Usually, The Numerical Control Drilling Machine will meet the demands, and the numerical control system based on Siemens’, it can do high speed drilling and accuratel y. Compared with the traditional Numerical Control Drilling Machine, it’s suitable for some larger diameter and deep hole processing, and still meet the requests of speed, high precision, high production efficiency requirements.The Position Control System will take care of the mode of motion. Firstly, in a rapid rate moves to the near position of the end. And it with a low speed to the correct end position. To ensure it can be in the good location accuracy.And control the half-closed-loop control system, by detecting the position of the moving parts of the system, and then back to the comparison of the numerical control device, and enter the location of the original instructions, control difference compared, is moving parts added, until the difference until the surrender, thus increasing the precision of workpiece machining【Key words】Precision, Numerical Control Technology, Multi-station, Drilling名目绪论 (1)1、概论 (2)1.1 国内外研究现状 (2)1.2 论文工作的意义 (2)1.3 论文研究的要紧工作 (3)2、系统设计 (3)2.1 机床系统设计框图 (3)2.2 系统的详细组成 (4)2.2.1 动力系统 (4)2.2.2 传动系统 (4)2.2.3 数控系统 (5)2.3 详细技术分析 (5)2.4 数控多工位钻床结构图 (6)2.5 本章小结 (7)3、详细设计 (7)3.1 切削力的运算 (7)3.1.1 确定加工工件尺寸 (7)3.1.2 运算切削力和扭矩 (7)3.1.3 确定主轴齿轮传动方案 (9)3.1.4齿轮设计 (10)3.2主轴的设计及运算 (14)3.2.1 弯曲应力运算及验算 (15)3.3 轴承的选择 (15)3.4 系统进给机构的设计 (16)3.4.1 轴向进给机构设计 (16)3.4.2 纵向进给运动 (18)3.4.3 纵向进给滚珠丝杠的核算 (20)3.4.4 回转工作台运动分析 (24)3.5导轨的设计 (27)3.5.1 X轴向移动导轨的预选: (27)3.5.2 导轨的相关运算 (28)3.5.3 导轨的压强运算和分布 (30)3.5.4 滑动导轨的验算 (32)3.5.5 导轨压强 (34)3.5.6 导轨及齿轮传动间隙调整分析 (34)3.6 运算机数控装置系统设计 (35)3.6.1 数控装置系统硬件组成 (35)3.6.2 运算机数控装置软件 (36)3.6.3 步进电机的接口电路 (38)3.6.4 系统总程序 (38)3.7 本章小结 (39)总结与展望 (40)参考文献 (41)致谢 (43)绪论数控机床是现代科学进展的一个重要标志之一,由于数控机床相关于传统机床极大地提高了加工精度、生产率和自动化程度,因此在加工中得以广泛应用。
四工位组合机床的plc控制系统设计 正文
正文第一章绪论一、组合机床概述组合机床是针对特定工件,进行特定加工而设计的一种高效率自动化专用加工设备,这类设备大多能多刀同时工作,并且具有自动循环的功能。
组合机床是随着机械工业的不断发展,由通用机床、专用机床发展起来的。
通用机床一般用一把刀具进行加工,自动化程度低、辅助时间长、生产效率低,但通用机床能够重新调整,以适应加工对象的变化。
专用机床可以实现的多刀切削,自动化程度较高,结构较简单,生产效率也较高。
但是,专用机床的设计,制造周期长,造价高,工作可靠性也较差。
专用机床是针对某工件的一定工序设计的,当产品进行改进,工件的结构,尺寸稍有变化时,它就不能继续使用。
在综合了通用机床、专用机床优点的基础上产生了组合机床。
组合机床通常由标准通用部件和加工专用部件组合构成,动力部件采用电动机驱动或采用液压系统驱动,由电气系统进行工作自动循环的控制,是典型的机电或机电液一体化的自动加工设备。
常见的组合机床,标准通用部件有动力滑台各种加工动力头以及回转工作台等,可用电动机驱动,也可用液压驱动。
各标准通用动力部件组合构成一台组合机床时,该机床的控制电路可由各动力部件的控制电路通过一定的连接电路组合构成。
多动力部件构成的组合机床,其控制通常有三方面的工作要求:第一方面是动力部件的点动和复位控制。
第二方面是动力部件的半自动循环控制。
第三方面是整批全自动工作循环控制。
组合机床具有生产率高、加工精度稳定的优点。
因而,在汽车、柴油机、电机、机床等一些具有一定生产批量的企业中得到了广泛应用。
目前,组合机床的研制正向高效、高精度、高自动化和柔和性化方向发展。
本文所用组合机床为四工位组合机床,该机床由四个滑台,各载一个加工动力头,组成四个加工工位,除了四个加工工位外,还有夹具,上下料机械手和进料器,四个辅助装置以及冷却和液压系统共14个部分。
机床的四个加工动力头同时对一个零件的四个端面以及中心孔进行加工,一次加工完成一个零件,由上料机械手自动上料,下料机械手自动取走加工完成的零件,零件每小时可加工80件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工位专用机床的设计 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】湖南工业大学课程设计资料袋机械工程学院(系、部)第二零一零---二零一一学年第二学期课程名称机械原理课程设计指导教师职称教授学生姓名专业班级学号题目四工位专用机床的设计成绩起止日期2011年7月1日~2011年7月5日目录清单机械原理课程设计设计说明书四工位专用机床的设计起止日期:2011年7月1日至2011年7月5日学生姓名班级学号成绩指导教师(签字)机械工程学院(部)2011年7月1日目录0.课程设计任务书 (2)1.设计题目 (3)2.工作原理和工艺动作分解 (4)3.根据工艺动作和协调要求拟定运动循环图 (5)4.四工位专用机床的功能分析与设计过程 (5)5.间歇转动机构与刀具移动机构等主要机构选型 (7)6.机构运动方案的评价和选择 (11)7.机械传动系统的速比和变速机构 (13)8.执行机构的尺度综合 (14)9.画机构运动简图 (15)10.参考资料 (16)11.设计总结及感悟 (16)湖南工业大学课程设计任务书2010—2011学年第2学期机械工程学院(系、部)机械大类专业班级课程名称:机械原理课程设计设计题目:四工位专用机床的设计完成期限:自2011年7月1日至2011年7月5日共1周指导教师:2011年7月1日系(教研室)主任:2011年7月1日1.设计题目:四工位专用机床的设计设计原理:四工位专用机床是在四个工位上分别完成工件的装卸、钻孔、扩孔、铰孔工作的专用加工设备。
机床的执行动作有两个:一是装有工件的回转工作台的间歇转动;二是装有三把专用刀具的主轴箱的往复移动(刀具的转动由专用电机驱动)。
两个执行动作由同一台电机驱动,工作台转位机构和主轴箱往复运动机构按动作时间顺序分支并列,组合成一个机构系统。
设计要求:1)刀具顶端离开工作表面65mm,快速移动送进60mm,再匀速送进60mm(包括5mm刀具切入量、45mm工件孔深、10mm刀具切出量,如图1-1),然后快速返回。
行程速比系数K=;2)刀具匀速进给速度为2mm/s,工件装卸时间不超过10s;3)机床生产率60件/h;4)执行机构及传动机构能装入机体内;5)传动系统电机为交流异步电动机,功率,转速960r/min。
图1-1孔加工示意图2. 工作原理和工艺动作分解工作原理根据四工位专用机床的工艺过程,机构应有一个电动机和二个执行构件(刀架进给、卡盘旋转)。
必须严格控制时间顺序,保持协调。
1.装有工件的回转工作台的间歇转动,该机构有四个工作位置,在每次转动90度时实现装卸,钻孔,扩孔和绞孔。
故此在主机构每次行程中工作台只需转动90度,其余保持静止不动,其工作行程图如下:工艺动作分解2.装有三把专用工具刀得主轴箱的往复运动(刀具由专用电动机驱动),该构件整个往复运动的时间t=60s。
需快速移动送进60mm;在以2mm/s的速度送进60mm,最后快速返回120mm。
其运动简图如下:3.根据工艺动作和协调要求拟定运动循环图拟定运动循环图的目的是确定各机构执行构件动作的先后顺序、相位,以利于设计、装配和调试。
根据专用机床的工作过程和规律拟定的运动循环图如下图3-1所示:图4-1机床的功能分析图由机床的功能分析图可知,其运动有:装载旋转钻孔、扩孔、铰空卸载,如图4-2所示:图4-2机床的运动示意图要确保在刀具与工件接触时卡盘固定不动,刀具退出工件到下次接触工件前完成卡盘旋转动作。
几个动作必须协调一致,并按照一定规律运动。
机床的设计过程:实现四工位专用机床的机构应有下面几种基本功能:①在专用机床的装、卸、钻、扩、铰各个过程中,定位机构要处于停歇状态,故该机构要有五次间歇转动功能。
②要满足定位功能与各个运动功能联动组合③需要主轴箱机构有往复运动④需要回转台有间歇转动⑤我们由生产率求出运动循环时间T=60s,刀具匀速送进60mm需要时间t=30s,刀具其余移动时间30s。
回转工作台静止时间40s,因此足够工件装卸所需时间。
5.回转台间歇转动机构与主轴箱刀具移动机构等主要机构选型回转台间歇转动机构选型回转工作台的运动规律:四个工作位置,每个工作位置之间相差90°,在工过程中,旋转90°,停止定位,进刀加工,快速退刀后,旋转90°,进行下一个循环。
在加工和退刀的前半段(即刀具与工件有接触)时,必须将工作台固定,由于卡盘的工作位置为四个,还要满足间歇和固定两个工作。
有以下三种方案:1、采用单销四槽槽轮机构。
其结构图如下图所示:槽轮机构中,当圆销没有进入槽轮的径向槽时,由于槽轮的内凹锁止弧被拨盘的外凸锁止弧卡住,故槽轮固定不动;当圆销进入径向槽时,锁止弧的自锁段被松开,槽轮在圆销作用下旋转,实现了间歇运动。
因为卡盘每次旋转90°,所以选择四槽均布槽轮,刚好实现旋转90°的要求。
2、采用棘轮机构,其结构图如下图所示:机构采用曲柄摇杆机构来作为主动件,由运动循坏图中可知:于是得:K>所以极位夹角大于等于°因此满足停留时间的于转动时间之间的比例关系,要求棘轮每次旋转90°,因此摇杆的摆角也为90°。
3、采用不完全齿轮机构,其结构如下图所示:不完全齿轮的设计也是为了满足间歇运动,不完全齿轮上有1/4上有齿,因此在啮合过程中,有齿的1/4带动完全齿轮旋转90°,之后的270°由于没有齿啮合,完全齿轮不转动,该机构结构简单,在低速(1r/min )的转动中可与忽略齿轮啮合时的冲击影响。
故也能实现运动规律。
综上所诉三个方案中,可根据实际情况进行合理选择主轴箱刀具移动凸轮机构选型1、运动规律:刀具运动规律:刀具快速进给60mm ,匀速进给60mm (刀具切入量5mm,工件孔深45mm,刀具余量10mm ),快速退刀。
因为刀具匀速进给的速度为2mm/s ,由此可得匀速进给的时间为30s ,设快速进给的时间为x ,快速退刀的时间为y ,又因为其回程和工作的速比系数K=,所以可得下列方程:30+x=2y(1)30+x+y=60(2)(1)(2)两个方程联立可以得出,x=9s,y=21s60°240° 2、主轴箱刀具凸轮廓线设计:进刀机构的运动有凸轮的廓线来实现,进刀的方向为安装凸轮的轴的轴线方向,根据运动的特性,凸轮选择圆柱凸轮,按照运动规律设计其廓线如下:位移主轴箱刀具运动规律图1、蜗杆:m=5mmd=40mm(机械原理教材,p215,表)2、涡轮:(d=mz)m=5mmz2=20d2=100mmz4=18d4=90mm3、齿轮:此齿轮机构的中心距a=165mm,模数m=5mm,采用标准直齿圆柱齿轮传动,z5=18,z6=48,ha*=,(d=mz,d5=90mm,d6=240mm)4、传动比计算:方案二:外啮合行星齿轮减速器:结构图如下:12345678图示z1=10,z2=24,z3=18,z4=21,z5=20,z6=17,z7=14,z8=40传动比计算:i18=i12iH6i78其中i12=-z2/z1=-24/10iH6=1/i6H所以336017211820182011636=⨯-⨯⨯=-=HH ii又i78=-z8/z7=-40/12涡轮蜗杆减速机构外啮合行星轮系减速机构所以方案三:定轴轮系减速器结构图如下:图示z1=17,z2=51,z3=12,z4=40,z5=12,z6=72,z7=13,z8=52,z9=12,z10=48,z11=48传动比计算:i111= 109753111108642z z z z z z z z z z z z ⨯⨯⨯⨯⨯⨯⨯⨯⨯⨯=9606.机构运动方案的评价和选择(一)、传动机构1、涡轮蜗杆减速器方案分析:此方案采用最普通的右旋阿基米德蜗杆。
采用蜗杆传动的主要原因有:(1)、传动平稳,振动、冲击和噪声均较小;(2)、能以单级传动获得较大的传动比,故结构比较紧凑;(3)、机构返行程具有自锁性;本方案通过较为简单的涡轮蜗杆机构实现了:=的大传动比。
满足了机构要求的性能指标,而且结构紧凑,节约空间。
本方案存在的不足:由于涡轮蜗杆啮合齿间的相对滑动速度较大,使得摩擦损耗较大,因此传动效率较低,易出现发热和温升过高的现象。
磨损也较严重。
解决的办法是可以采用耐磨的材料(如锡青铜)来制造涡轮,但成本较高。
定轴轮系减速机构2、外啮合行星齿轮减速器方案分析:该方案采用渐开线直齿圆柱齿轮啮合传动,所选轮系为外啮合行星齿轮系,采用齿轮机构的原因是其在各种机构中的运用比较广泛,且制造过程简单,成本较低,并且具有功率范围大,传动效率高,传动比精确,使用寿命长,工作安全可靠等特点。
方案中齿轮系为复合轮系,实现了:=的大传动比。
且具有较高的传动效率。
本方案中存在的不足是,齿轮机构结构不够紧凑,占用空间较大。
3、定轴轮系减速器方案分析:该方案采用渐开线直齿圆柱齿轮啮合传动,所选轮系为定轴轮系,采用该机构的原因是运用广泛,制造过程简单,成本较低,并且具有功率范围大,传动效率高,传动比精确,使用寿命长,工作安全可靠等特点。
方案中轮系为定轴轮系,实现了:=的大传动比。
本方案中存在的不足是,齿轮机构结构不够紧凑,占用空间较大。
(二)、回转工作台回转机构1、单销四槽槽轮机构该方案采用槽轮机构,是因为该机构构造简单,外形尺寸小,其机械效率高,并能较平稳地,间歇地进行转位。
本方案中的不足在于在槽轮机构的传动过程中往往存在着柔性冲击,故常用于速度不太高的场合。
此机床中属于低速旋转,因此槽轮机构能够满足要求。
2、棘轮机构该方案采用棘轮机构,是因为该机构的结构简单,制造方便,运动可靠,而且棘轮轴每次转过的角度可以在较大的范围内调节,与曲柄摇杆机构配合使用使其具有急回特性。
本方案中的不足在于棘轮机构在工作时有较大的冲击和噪音,而且运动精度较差,常用于速度较低和载荷不大的场合。
此机床中属于低速旋转,冲击可以忽略,对于精度要求不是太高,因此该机构能够满足要求。
3、不完全齿轮机构:该方案采用不完全齿轮啮合实现间歇运动,此机构结构简单,加工安装容易实现,由于其中含标准件,有很好的互换性,有精确的传动比,所以在工作过程中精度较高。
此机构的不足是由于在进入啮合时有冲击,会产生噪声,齿轮在磨损过程中会对精度有一定影响。
但是对于低速旋转机构,此机构能够满足使用要求。
结果:经过方案分析与比较,该机构最终选择如下方案组合:1、电机选择交流异步电动机。
该电动机额定功率P=,满载转速n=960r/min。
扭矩和功率均能满足工作要求。
2、传动、减速机构采用蜗轮蜗杆减速机构。
蜗轮蜗杆的最大优点就是能实现大传动比,结构紧凑,占用空间较小,传动平稳,振动、冲击和噪声均较小,并且反行程能自锁。