Canny边缘检测器.ppt
基于sobel和canny的边缘检测原理
基于sobel和canny的边缘检测原理
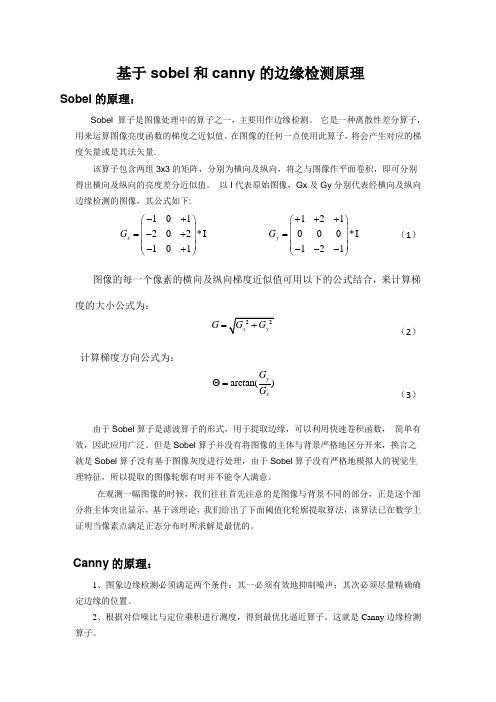
Sobel的原理:
Sobel 算子是图像处理中的算子之一,主要用作边缘检测。
它是一种离散性差分算子,用来运算图像亮度函数的梯度之近似值。
在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量.
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
以I代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像,其公式如下:
由于Sobel算子是滤波算子的形式,用于提取边缘,可以利用快速卷积函数,简单有效,因此应用广泛。
但是Sobel算子并没有将图像的主体与背景严格地区分开来,换言之就是Sobel算子没有基于图像灰度进行处理,由于Sobel算子没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。
在观测一幅图像的时候,我们往往首先注意的是图像与背景不同的部分,正是这个部分将主体突出显示,基于该理论,我们给出了下面阈值化轮廓提取算法,该算法已在数学上证明当像素点满足正态分布时所求解是最优的。
Canny的原理:
1、图象边缘检测必须满足两个条件:其一必须有效地抑制噪声;其次必须尽量精确确
定边缘的位置。
2、根据对信噪比与定位乘积进行测度,得到最优化逼近算子。
这就是Canny边缘检测
算子。
3、类似于LoG边缘检测方法,属于先平滑后求导数的方法。
Canny边缘检测算法可以分为四个步骤:
1)用高斯滤波器平滑图象;
2)用一阶偏导的有限差分来计算梯度的幅值和方向;3)对梯度幅值进行非极大值抑制
4)用双阈值算法检测和连接边缘。
LOG与Canny边缘检测比较
边缘检测

边缘检测算子图像配准的方法7.4.1 基于特征的图像配准基于特征的图像配准首先提取图像信息的特征,然后以这些特征为模型进行配准。
特征提取的结果是一含有特征的表和对图像的描述,每个特征由一组属性表示,对属性的进一步描述包括边缘的定向和弧度、区域的大小等。
局部特征之间存在着相互关系,如几何关系、辐射度量关系、拓扑关系等。
可以用这些局部特征之间的关系描述全局特征。
通常基于局部特征配准大多都是基于点、线或边缘的,而全局特征的配准则是利用局部特征之间的关系进行配准的方法。
由于图像的特征点比图像的像素点要少很多,因此大大减少了配准过程的计算量,但特征提取方法的计算代价通常较大,不便于实时应用。
特征点的配准度量值对位置的变化比较敏感,可以大大提高配准的精确程度。
对于纹理较少的图像区域提取的特征的密度通常比较稀少,局部特征的提取就比较困难。
特征点的提取过程可以减少噪声的影响,对灰度变化、图像形变和遮挡等都有较好的适应能力。
因此,在图像配准领域得到了广泛应用。
基于特征的图像配准方法有两个重要环节:特征提取和特征配准。
7.4.2 基于互信息的图像配准医学图像配准技术从基于特征的配准方法发展到基于统计的配准方法有其突破性的意义。
与基于特征的配准方法相比,基于统计的配准方法的突出优点为鲁棒性好、配准精度高、人工干预少。
基于统计的配准方法通常是指最大互信息的图像配准方法。
基于互信息的图像配准是用两幅图像的联合概率分布与完全独立时的概率分布的广义距离来估计互信息,并作为多模态医学图像配准的测度。
当两幅基于共同的解剖结构的图像达到最佳配准时,它们的对应像素的灰度互信息应为最大。
由于基于互信息的配准对噪声比较敏感,首先,通过滤波和分割等方法对图像进行预处理。
然后进行采样、变换、插值、优化从而达到配准的目的。
基于互信息的配准技术属于基于像素相似性的方法。
它基于图像中所有的像素进行配准,基于互信息的图像配准引入了信息论中的概念,如熵、边缘熵、联合熵和互信息等,可使配准精度达到亚像素级的高精度。
Canny算子
1、边缘检测原理及步骤在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。
结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。
在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。
这就使得在边缘检测中首先要进行的工作是滤波。
1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。
常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。
2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。
增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。
在具体编程实现时,可通过计算梯度幅值来确定。
3)检测:经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。
实际工程中,常用的方法是通过阈值化方法来检测。
2、Canny边缘检测算法原理JohnCanny于1986年提出Canny算子,它与Marr(LoG)边缘检测方法类似,也属于是先平滑后求导数的方法。
本节对根据上述的边缘检测过程对Canny检测算法的原理进行介绍。
2.1 对原始图像进行灰度化Canny算法通常处理的图像为灰度图,因此如果摄像机获取的是彩色图像,那首先就得进行灰度化。
对一幅彩色图进行灰度化,就是根据图像各个通道的采样值进行加权平均。
Canny边缘检测

Canny边缘检测图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。
图象的边缘部分集中了图象的大部分信息,图象边缘的确定与提取对于整个图象场景的识别与理解是非常重要的,同时也是图象分割所依赖的重要特征,边缘检测主要是图象的灰度变化的度量、检测和定位,自从1959提出边缘检测以来,经过五十多年的发展,已有许多中不同的边缘检测方法。
根据作者的理解和实践,本文对边缘检测的原理进行了描述,在此基础上着重对Canny检测算法的实现进行详述。
本文所述内容均由编程验证而来,在实现过程中,有任何错误或者不足之处大家共同讨论(本文不讲述枯燥的理论证明和数学推导,仅仅从算法的实现以及改进上进行原理性和工程化的描述)。
1、边缘检测原理及步骤在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。
结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。
在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。
这就使得在边缘检测中首先要进行的工作是滤波。
1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。
常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。
基于Canny算法的改进型图像边缘检测算法
Absr t tac Can y dge n e deecin gorhm i a i o e t t al i o t s knd f dge deec i al i m whi h v go c t t on gorh t ch a e od ompr h sv ev la i , t e en ie au t bu on te Ga s an ier lorhm i h u si ft ag i l t t us m a c s i a to s o h nd u z o te ed y au e m ge o m ot a f z y f h ed ge,nd t s e y en iv f a i v r s st e or i i sl at &pepp n ie. i pa er os Ths perdic ss t i s u es he mpr vn m e h ds f o ig t o o Can yAn m prv s t medi ft r l r h n i o ed wi ch an ie ago i m i l t s pr — o
l G(x x d f 一 ) )xI
() 1
SR N
() f=
Ca n 法 中高 斯 滤 波方 法很 难 满 足边 缘 检测 的要 求 。 n y算 针 对 这 个 问 题 , 们 提 出 了各 自的解 决 方 法 。 如 林 玉池 等 人 例 人 用 固定 小 8 8 1 的 滤 波 器 , 过 Win r 波 及 选 择 合 适 的 (= ) 通 ee滤 高 、 门 限 来 提 高 信 噪 比 ; 有 人 将 小 波分 析 、 糊 增 强 I、 度 低 也 模 3梯 ] 直 方 图 等 概 念 引入 C n y算 法 , 达 到 了一 定 的 效果 。 an 也 本 文 参 考 文 献 [ ] 提 出 了一 种 基 于 排 序 阈 值 的 开关 中值 5中 滤 波 方 法 , 文 将 对 其 做 进 一 步 的 改 进 , 用 一 种 基 于 方 向信 息 本 采 的 ,具 有 双 阈 值 噪声 判别 功 能 的改 进 型 开关 中值 滤 波 方 法 来 替
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释1.引言1.1 概述边缘检测是图像处理中的一个重要任务,它广泛应用于计算机视觉、图像分析和模式识别等领域。
边缘检测的目标是找到图像中不同区域之间的边界,并将其表示为像素强度的变化。
Canny边缘检测算法是一种经典且常用的边缘检测方法。
它通过一系列的图像处理步骤来提取图像中的边缘信息。
Canny算法的特点是能够检测出细且准确的边缘,并且对于图像中的噪声具有较好的抵抗能力。
Matlab是一种功能强大的数学软件,广泛应用于科学计算、数据可视化和图像处理等领域。
Matlab提供了丰富的图像处理函数和工具箱,其中包括了Canny边缘检测的实现代码。
本文的主要目的是介绍Matlab中Canny边缘检测的代码实现,并结合Hough变换算法进行边缘检测的应用。
通过使用Matlab中的相关函数和工具,我们可以有效地实现Canny边缘检测,并结合Hough变换来进一步处理和分析图像中的边缘特征。
本文将首先回顾Canny边缘检测算法的原理和步骤,然后介绍Matlab中的Canny边缘检测代码的使用方法。
接着,我们将介绍Hough 变换算法的原理和应用,并展示如何将Canny边缘检测与Hough变换相结合来实现更精确的边缘检测。
最后,我们将对Canny边缘检测和Hough变换的优缺点进行讨论,总结这两种方法在边缘检测中的应用。
同时,我们也将展望未来的研究方向,探讨如何进一步改进和优化边缘检测算法,以满足不断发展的图像处理需求。
通过阅读本文,读者将能够理解Canny边缘检测算法和Hough变换算法的原理,掌握Matlab中相关代码的使用方法,并了解边缘检测在实际应用中的优势和局限性。
希望本文能为读者在图像处理领域的学习和研究提供一定的帮助和启示。
文章结构是指文章的整体框架和组织形式。
一个良好的文章结构可以使读者更好地理解和领会文章的内容,同时也有助于文章的逻辑性和条理性。
matlab中canny边缘检测算法的实现
matlab中canny边缘检测算法的实现【Matlab中Canny边缘检测算法的实现】引言:边缘检测是计算机视觉和图像处理领域中的一项重要任务,主要用于提取图像中物体的轮廓或边界。
在边缘检测算法中,Canny算法是一种非常经典和常用的方法,由John F. Canny于1986年提出。
该算法被广泛应用于计算机视觉领域,实现了较好的边缘检测效果和低误报率。
本文将详细介绍在Matlab中实现Canny边缘检测算法的步骤和原理。
1. 算法原理:Canny边缘检测算法主要包含以下几个步骤:(1)使用高斯滤波平滑图像,减少噪声的影响。
(2)计算图像的梯度幅值和方向,确定图像中的强边缘。
(3)应用非极大值抑制算法,细化边缘。
(4)通过双阈值处理,进一步筛选边缘像素。
(5)连接边缘像素,得到最终的边缘结果。
2. 算法实现步骤:在Matlab中,我们可以利用内置函数和库函数来实现Canny边缘检测算法。
下面将一步一步介绍具体的实现过程。
2.1 加载图像:首先,我们需要加载一张待处理的图像。
可以使用imread函数加载图像,例如:img = imread('image.jpg');2.2 灰度化处理:Canny算法通常在灰度图像上进行,因此我们需要将彩色图像转换为灰度图像。
可以使用rgb2gray函数实现:grayImg = rgb2gray(img);2.3 高斯滤波:为了减少噪声的影响,我们需要对图像进行平滑处理。
可以使用fspecial函数创建高斯滤波器,然后使用imfilter函数对灰度图像进行滤波。
示例代码如下:filterSize = 5; % 设置滤波器尺寸sigma = 1; % 设置高斯分布的标准差gaussianFilter = fspecial('gaussian', [filterSize filterSize], sigma); smoothImg = imfilter(grayImg, gaussianFilter, 'symmetric');2.4 计算梯度幅值和方向:接下来,我们需要计算图像中每个像素的梯度幅值和方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对NMS结果进行二值化
• 对上述得到的N(x,y)使用阈值进行二值化 • 使用大的阈值,得到:
– 少量的边缘点 – 许多空隙
• 使用小的阈值,得到:
– 大量的边缘点 – 大量的错误检测
使用双阈值检测边缘
• 两个阈值T1,T2: T2 >> T1
–由T1得到E1(x,y),低阈值边缘图:更大的误检测率 –由T2得到E2(x,y),高阈值边缘图:更加可靠
Canny算子:流程
原始图像
原始图像经过Gauss平滑
Canny算子:流程
梯度幅值图像
梯度幅值经过非极大值抑制
Canny算子:流程
低阈值边缘图像
高阈值边缘图像
Canny输出边缘图像
使用Canny算子需要注意的问题
• Canny算子的优点:
– 参数较少 – 计算效率 – 得到的边缘连续完整
• 参数的选择:
Canny边缘检测器
• 也许是最常用的边缘检测方法 • 一个优化的方案
– 噪声抑制 – 边缘增强 – 边缘定位
CanБайду номын сангаасy边缘检测算法
• 算法基本过程:
计算图像梯度
幅值大小M(x,y) 方向Theta(x,y)
梯度非极大值抑制
NMS: Non-Maxima Suppression
双阈值提取边缘点
计算图像梯度:高斯函数的一阶导数
• 高斯函数的一阶导数(Derivative of Gaussian) • 可以很近似地满足以下三条边缘检测最优准则:
–好的边缘检测结果:Good detection 对边缘的响应大于对噪声的响应
–好的定位性能:Good localization 其最大值应接近边缘的实际位置
–对同一边缘有低的响应次数: 在边缘附近只有一个极大值点
• 边缘连接:
E1
E2
E2 E1
E1
E1
E2
边缘连接
• 将E2(x,y)中相连的边缘点输出为一幅边缘 图像E(x,y)
• 对于E(x,y)中每条边,从端点出发在 E1(x,y)中寻找其延长的部分,直至与 E(x,y)中另外一条边的端点相连,否则认 为E1(x,y)中没有它延长的部分
• 将E(x,y)作为结果输出
• 困难的原因
– 让计算机理解图像:从数值矩阵到语义概念 – 实际问题的复杂性:噪声,光照,阴影…
推荐文献阅读
• J.Canny, “A Computational Approach to Edge Detection”, IEEE Trans. on PAMI, 8(6),1986.
• F. A. Pellegrino, W. Vanzella, and V. Torre, Edge Detection Revisited, IEEE TRANS. on SYSTEMS, MAN, AND CYBERNETICS, VOL. 34, NO. 3, JUNE 2004
若M(x,y)不是这些点中的最大点,则将N(x,y)置零,否 则保持N(x,y)不变。 • N(x,y) 单像素宽度:
– 问题:额外的边缘点,丢失的边缘点
非极大值抑制 NMS
• 在梯度方向的沿线上检测该点是否为局部极大值 • 简化的情形,只使用4个方向:{0,45,90,135}
• 得到的结果N(x, y)包含边缘的宽度为1个像素
– Gauss滤波的尺度 – 双阈值的选择(LOW=HIGH*0.4)
渐增高斯滤波模版的尺寸
渐增双阈值的大小,保持low = high*0.4
边缘检测小结
• 边缘检测是计算机视觉中最基本的问题之一 • 没有一种统一的方法可以解决所有的边缘分割问
题:
– 抑制噪声的能力 – 定位精度 – 计算的复杂程度
计算图像梯度:高斯函数的一阶导数
(1)求图像与高斯平滑滤波器卷积:
代表对图像的平滑程度
(2)使用一阶有限差分计算偏导数的两个阵列:
相当于与模版进行卷积运算: -1 1 -1 1
11 -1 -1
计算图像梯度:高斯函数的一阶导数
(3)幅值和方位角:
M 代表梯度幅值的大小,在存在边缘的图像位置处,M
的值变大,图像的边缘特征被“增强”
Canny边缘检测器
J.Canny, “A Computational Approach to Edge Detection”, IEEE Trans. on PAMI, 8(6),1986.
John Canny CS Division, University of California, Berkeley BID: The Berkeley Institute of Design
如何检测边缘?
局部极值周围存在相近数 值的点
非极大值抑制 NMS
• 非极大值抑制( NMS:Non-Maxima Suppression ) • 主要思想:由梯度幅值图像M(x,y),仅保留极大值。 (严格地说,保留梯度方向上的极大值点。) 得到的结果为N(x,y),具体过程:
– 初始化N(x,y) = M(x,y) – 对于每个点,在梯度方向和反梯度方向各找n个像素点。