谐波减速器
谐波减速器技术要求
谐波减速器技术要求
谐波减速器是一种具有高传动精度和扭矩输出的减速装置,其技术要求包括以下几个方面:
1. 传动精度要求高:谐波减速器可以达到更高的传动精度,通常可达到0.1-1角秒。
传动精度的要求取决于具体的应用场景,比如一些精密仪器、机械手等需要更高的传动精度。
2. 扭矩输出大:谐波减速器可以输出较大的扭矩,一般可达到减速比乘以输入扭矩。
扭矩输出的大小与传动比、减速器的结构和材料等因素有关。
3. 体积小、重量轻:谐波减速器通常用于限定空间和重量要求较高的场景,因此要求体积小、重量轻,以满足实际应用需求。
4. 高工作效率:谐波减速器的工作效率是指输出功率和输入功率之比,一般要求在90%以上。
5. 耐久性和可靠性:谐波减速器在使用过程中需要具备一定的耐久性和可靠性,能够在长时间、高负载情况下稳定工作,并且需要具备较长的使用寿命。
除了以上几个方面的技术要求,谐波减速器还需要根据具体的应用场景来确定参数和性能指标,比如工作温度范围、防护等级、防爆要求等。
谐波减速器节圆直径

谐波减速器节圆直径1. 什么是谐波减速器谐波减速器是一种通过谐波传动原理实现减速的装置。
它由柔性齿轮和刚性齿轮组成,通过谐波发生器的作用,将输入轴的高速旋转运动转换为输出轴的低速高扭矩运动。
2. 谐波减速器的结构谐波减速器主要由三部分组成:谐波发生器、柔性齿轮和刚性齿轮。
2.1 谐波发生器谐波发生器是谐波减速器的核心部件,它由内外套、滚柱、滚柱轴承等组成。
谐波发生器通过内外套的相对运动,使滚柱在内外套之间滚动,从而产生谐波运动。
2.2 柔性齿轮柔性齿轮由柔性齿带和齿轮支撑体组成。
柔性齿带由弹性材料制成,具有一定的柔韧性和弹性,能够适应谐波发生器的谐波运动。
2.3 刚性齿轮刚性齿轮是谐波减速器的输出部件,它由刚性齿轮和输出轴组成。
刚性齿轮通过与柔性齿轮的啮合,将谐波运动转换为输出轴的低速高扭矩运动。
3. 谐波减速器节圆直径的作用谐波减速器节圆直径是指柔性齿带的中心线所描述的圆的直径。
节圆直径的大小直接影响谐波减速器的传动比和输出性能。
3.1 传动比传动比是谐波减速器的输入速度与输出速度之比。
节圆直径的变化会导致传动比的变化,从而影响输出轴的速度。
3.2 输出性能谐波减速器的输出性能包括输出扭矩和输出精度。
节圆直径的变化会改变柔性齿带的弯曲程度和啮合状态,进而影响输出扭矩和输出精度。
4. 谐波减速器节圆直径的计算谐波减速器节圆直径的计算需要考虑多个因素,包括传动比、输出扭矩和输出精度等。
4.1 传动比计算传动比的计算公式为:传动比 = 节圆直径 / 谐波发生器半径4.2 输出扭矩计算输出扭矩的计算公式为:输出扭矩 = 输入扭矩 * 传动比4.3 输出精度计算输出精度的计算需要考虑柔性齿带的变形和啮合误差等因素,一般通过实验或模拟计算得到。
5. 谐波减速器节圆直径的选择谐波减速器节圆直径的选择需要综合考虑传动比、输出扭矩和输出精度等因素。
5.1 传动比选择根据实际需求确定所需的传动比范围,然后根据传动比计算公式选择合适的节圆直径。
RV减速机和谐波减速机对比,哪个性能更好?

大量应用在关节型机器人上的减速器主要有两类:RV减速机和谐波减速机。
那么,对于这两种减速机,哪个更有优势?两者的原理、优劣势区别在哪?是否可以相互取代?让我们一起来了解一下。
谐波减速机用于负载小的工业机器人,或者是大型机器人末端几个轴,特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。
谐波减速机是谐波传动装置的其中一种,谐波传动装置包括了加速机和减速机。
谐波减速机主要结构有刚轮、柔轮、轴承和波发生器,缺一不可。
其中,刚轮的齿数略大于柔轮的齿数。
RV减速机常适用于扭矩较大的机器人关节中,具体是腿部腰部和肘部这三个关节。
负载大的工业机器人,一二三轴用的都是RV减速机。
RV减速机与谐波减速机相比具有更高的疲劳强度、刚度和寿命。
谐波减速机的缺点还包括,随着使用时间增长,运动精度会降低。
跟谐波减速机重量轻体积小的的优点相反,RV减速机的缺点是其重量重,外形尺寸较大。
两者均为少齿差啮合,不同的是谐波减速机中的一种关键齿轮具有柔性,需要反复高速变形,因而较为脆弱,所以谐波减速机跟RV减速机相比,承载能力低,寿命短。
RV减速机一般用的是摆线针轮,谐波减速机以前用的的是渐开线齿形,现在有些厂家用的是双圆弧齿形,比渐开线更高级一些。
与谐波减速机相比,RV减速机是一种新兴起的传动产品,RV减速机其实是在传统针线针轮减速机的基础上发展起来的,不仅克服了一般针摆传动的缺点,而且具有更多的优势,比如寿命长、保持精度稳定、效率高、传动顺畅等。
对于两者能不能替代的问题,概括来说其实有两种说法。
1、一是可以替代,但只是部分型号之间可以替代。
我们前面已经提到过RV减速机比机器人常用的谐波传动的疲劳强度、刚性和寿命都要高得多,而且回差精度稳定,不会像使用时间增长的谐波传动那样,运动精确度会明显降低。
很多国家的高精度机器人传动多采用RV减速机,所以RV减速机有一种发展趋势,逐渐开始取代了先进机器人传动中的谐波减速机。
谐波减速机的特点是轻和小,在这方面,行星减速机和RV减速机却很难做到。
谐波减速器工作原理
谐波减速器工作原理
谐波减速器是一种常用的机械传动装置,它通过利用弹性变形的原理将输入速度和输出速度之间的比例关系进行转换。
谐波减速器的工作原理如下:
1. 谐波发生器:谐波减速器的输入轴与谐波发生器相连,谐波发生器通常是一个内齿圈和一个柔性齿条组成的装置。
当输入轴旋转时,谐波发生器会产生谐波振动。
2. 谐波传动:谐波振动会通过内齿圈传递到输出轴,内齿圈上的前导齿和柔性齿条之间的啮合关系会引起传动的变形和滑移。
这样,谐波传动将输入轴的旋转运动转换成了输出轴的运动。
3. 减速效果:由于在谐波传动过程中存在变形和滑移,所以输出轴的转速会比输入轴的转速慢。
根据前导齿和柔性齿条的结构设计,可以实现不同的减速比。
谐波减速器具有结构简单、传动效率高、减速比大、可靠性强等优点,广泛应用于工业生产和机械设备中。
它适用于需要准确控制速度和力矩的场合,如机床、准确度要求高的机械装置等。
谐波减速机原理及应用
谐波减速器的原理及应用一、谐波减速器简介谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。
谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。
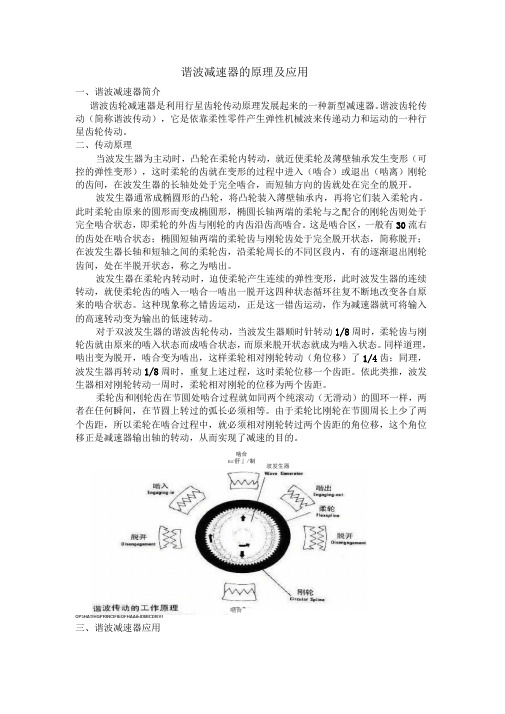
二、传动原理当波发生器为主动时,凸轮在柔轮内转动,就近使柔轮及薄壁轴承发生变形(可控的弹性变形),这时柔轮的齿就在变形的过程中进入(啮合)或退出(啮离)刚轮的齿间,在波发生器的长轴处处于完全啮合,而短轴方向的齿就处在完全的脱开。
波发生器通常成椭圆形的凸轮,将凸轮装入薄壁轴承内,再将它们装入柔轮内。
此时柔轮由原来的圆形而变成椭圆形,椭圆长轴两端的柔轮与之配合的刚轮齿则处于完全啮合状态,即柔轮的外齿与刚轮的内齿沿齿高啮合。
这是啮合区,一般有30流右的齿处在啮合状态;椭圆短轴两端的柔轮齿与刚轮齿处于完全脱开状态,简称脱开;在波发生器长轴和短轴之间的柔轮齿,沿柔轮周长的不同区段内,有的逐渐退出刚轮齿间,处在半脱开状态,称之为啮出。
波发生器在柔轮内转动时,迫使柔轮产生连续的弹性变形,此时波发生器的连续转动,就使柔轮齿的啮入一啮合一啮出一脱开这四种状态循环往复不断地改变各自原来的啮合状态。
这种现象称之错齿运动,正是这一错齿运动,作为减速器就可将输入的高速转动变为输出的低速转动。
对于双波发生器的谐波齿轮传动,当波发生器顺时针转动1/8周时,柔轮齿与刚轮齿就由原来的啮入状态而成啮合状态,而原来脱开状态就成为啮入状态。
同样道理,啮出变为脱开,啮合变为啮出,这样柔轮相对刚轮转动(角位移)了1/4齿;同理,波发生器再转动1/8周时,重复上述过程,这时柔轮位移一个齿距。
依此类推,波发生器相对刚轮转动一周时,柔轮相对刚轮的位移为两个齿距。
柔轮齿和刚轮齿在节圆处啮合过程就如同两个纯滚动(无滑动)的圆环一样,两者在任何瞬间,在节圆上转过的弧长必须相等。
由于柔轮比刚轮在节圆周长上少了两个齿距,所以柔轮在啮合过程中,就必须相对刚轮转过两个齿距的角位移,这个角位移正是减速器输出轴的转动,从而实现了减速的目的。
谐波减速器传动比计算公式

谐波减速器传动比计算公式
谐波减速器是一种高精度、高刚性的传动装置,其传动比计算公式是关键的参
数之一。
谐波减速器的传动比计算公式可以通过以下几个步骤得到。
首先,需要了解谐波减速器的构造。
谐波减速器由柔性齿轮、谐波发生器和固
定齿轮组成。
柔性齿轮通过谐波发生器的变形产生滚动摩擦,从而实现传动效果。
固定齿轮是与柔性齿轮嵌合的齿轮,通过固定齿轮转动一周导致柔性齿轮产生4倍于固定齿轮的转动。
其次,谐波减速器的传动比计算公式可以表示为:
传动比 = Ns × Nf × Np
其中,Ns是固定齿轮的齿数,Nf是柔性齿轮的齿数,Np是谐波发生器的齿数。
最后,通过使用以上的计算公式,可以得到谐波减速器的传动比。
需要注意的是,传动比是一个无单位的量,只是用来表示柔性齿轮相对于固定齿轮的旋转速度的比例关系。
传动比越大,输出转速越低,扭矩越大。
总的来说,谐波减速器的传动比计算公式可以通过齿轮的齿数和谐波发生器的
齿数来计算得到,它对于谐波减速器的设计和应用非常重要。
通过合理选择齿轮的齿数,并结合实际需求和使用条件,可以得到满足需求的谐波减速器传动比。
谐波减速器的工作原理

谐波减速器的工作原理
谐波减速器是一种通过谐波机构实现减速的装置。
其工作原理是利用谐波传动的特性,通过变形的弹性元件将输入轴的旋转运动转化为输出轴的减速旋转运动。
谐波减速器的基本结构包括驱动轮、柔性轮和输出轮。
驱动轮与输入轴相连,柔性轮与驱动轮相互啮合,输出轮与柔性轮相互啮合。
其中,柔性轮是由一组刚性齿和柔性片组成的。
当输入轴带动驱动轮旋转时,驱动轮的齿会与柔性轮的刚性齿啮合,使柔性轮产生变形。
柔性轮的变形会引起柔性片的屈曲和扭转,从而将输入轴的旋转运动转化为柔性轮的变形运动。
柔性轮的变形运动进一步传递到输出轮,使其产生减速旋转。
输出轮的齿与柔性轮的齿相互啮合,通过这种啮合关系,将柔性轮的变形运动转化为输出轮的旋转运动。
谐波减速器具有高减速比、高扭矩传递和高精度的特点。
其减速比可以达到传统齿轮传动的数十倍以上,扭矩传递效率通常在90%以上。
同时,由于谐波机构的特殊设计,谐波减速器的反向间隙非常小,具有较高的传动精度。
总之,谐波减速器通过谐波机构将输入轴的旋转运动转化为输出轴的减速旋转运动,实现了高减速比、高扭矩传递和高精度传动的功能。
它在工业领域中被广泛应用于机械设备和自动化系统中的减速装置。
谐波减速器原理
谐波减速器原理
谐波减速器是一种高效的机械传动装置,其工作原理基于谐波振动的特性。
它由一个输入轴和一个输出轴组成,并通过一系列的齿轮和齿条来实现传动。
谐波减速器的特殊之处在于其利用谐波振动将输入轴的旋转运动转化为输出轴的减速运动。
谐波减速器的关键部件是柔性齿锥轮、刚性振动器和柔性齿轮。
其中,柔性齿锥轮位于输入轴上,刚性振动器位于输出轴上,而柔性齿轮则位于两者之间。
当输入轴旋转时,柔性齿锥轮上的齿片会与刚性振动器上的凹槽轴向接触,从而引起柔性齿轮的弹性变形。
这个过程就像是在输入轴上施加了一个谐波振动。
通过柔性齿轮的弹性变形,输入轴上的旋转运动会被转移到输出轴上,并且发生减速。
柔性齿轮和刚性振动器的齿数和齿型设计得很精密,以确保旋转运动的平稳转换和高效的能量传递。
此外,谐波减速器的结构也具有紧凑和高扭矩传递能力的特点。
总的来说,谐波减速器利用谐波振动的原理实现输入轴旋转运动到输出轴的减速传动。
它具有结构简单、紧凑、高效等优点,被广泛应用于各种机械设备中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.波发生器常见的结构型(1):
波发生器是迫使柔轮发生弹性变形的 重要元件,按变形的波数不同,常用 的有双波和三波两种。双波发生器的 结构型式主要有滚轮式、凸轮式、偏 心盘式和行星式。
波发生器种类图例(1):
凸轮式
滚轮式
偏心盘式
2.波发生器常见的结构型(2):
双滚轮式:
结构简单,制造方便,形成波峰容易,但 柔轮变形未被积极控制,承载能力较低, 多用于不重要的低精度轻载传动。
多滚轮式:
柔轮变形全周被积极控制,承载能力较高, 多用于不宜采用偏心盘式或凸轮式波发生 器的特大型传动。
波发生器种类图例(2):
3.谐波传动主要零件常用材料:
柔轮:
30CrMnSi、35CrMnSiA、40CrNiMoA 45、40Cr
刚轮
凸轮或偏心盘
45
六、谐波发生器的典型结构
筒形底端联接式:
结构简单,联接方便,制造容易,刚性较大,应用较 普遍。
筒形花键联接式:
轴向尺寸较小,扭转刚性好,传动精度较高,联接方 便,承载能力较大。
轴向尺寸较小,结构简单,制造方便,但载荷沿齿宽 分布不均匀。
筒形销轴联接式:
筒形底端联接式图例:
筒形花键联接式图例:
筒形销轴联接式图例:
工作原理图例:
波发生器的旋转方 向与柔轮的转动方 向相反。
柔轮与刚轮齿面的啮合过程:
三、单级谐波齿轮常见的 传动形式和应用
1.刚轮固定—柔轮输出:
波发生器主动, 单级减速,结构 简单,传动比范 围较大,效率较 高,应用极广, i=75~500。
i
G HR
ZR ZG Z R
2.柔轮固定—刚轮输出:
i gH
Zb Z g Zb Z g Zb 1 Zg Zg Zg
实际上,运动是从波发生器输入的,减速器的传 动比为: Zg 1 iHg i gH Zb Z g
五、柔轮、波发生器 常见的结构型式
1.柔轮常见的结构型式:
柔轮的结构型式与谐波传动的结构类型选择 有关。柔轮和输出轴的联结方式直接影响谐 波传动的稳定性和工作性能。
波发生器主动, 单级减速,结构 简单,传动比范 围较大,效率较 高,可用于中小 型 减 速 器 , i=75~500。
i
R HG
ZG ZG Z R
3.波发生器固定—刚轮输出:
柔轮主动,单 级微小减速, 传动比准确, 适用于高精度 微调传动装置, i=1.002~1.015。
i
H RG
ZG ZR
2.特点(1):
谐波齿轮传动既可用做减速器,也可 用做增速器。柔轮、刚轮、波发生器 三者任何一个均可固定,其余二个一 为主动,另一个为从动。 传动比大,且外形轮廓小,零件数目 少,传动效率高。效率高达92%~96%, 单级传动比可达50~4000。
2.特点(2):
承载能力较高:柔轮和刚轮之间为面接 触多齿啮合,且滑动速度小,齿面摩损 均匀。 柔轮和刚轮的齿侧间隙是可调:当柔轮 的扭转刚度较高时,可实现无侧隙的高 精度啮合。 谐波齿轮传动可用来由密封空间向外部 或由外部向密封空间传递运动。
双波单级谐波齿轮减速器
主要问题:
1、减速器的主要构成;
2、减速器的运动型式(指出哪 个部件固定、主动和从动轴);
3、波发生器的结构型式;
4、柔轮采用何种输出方式。
二、工作原理
1.齿差:
谐波齿轮传动中,刚轮 的 齿 数 zG 略 大 于 柔 轮 的 齿 数 z R, 其 齿 数 差 要 根 据波发生器转一周柔轮 变形时与刚轮同时啮合 区域数目来决定。即zGzR=u。目 前多用 双波和 三波传动。错齿是运动 产生的原因
ZG ZR
2.变形:
波发生器的长度比未变形的柔轮内圆直径 大:当波发生器装入柔轮内圆时,迫使柔 轮产生弹性变形而呈椭圆状,使其长轴处 柔轮轮齿插入刚轮的轮齿槽内,成为完全 啮合状态;而其短轴处两轮轮齿完全不接 触,处于脱开状态。由啮合到脱开的过程 之间则处于啮出或啮入状态。 当波发生器连续转动时:迫使柔轮不断产 生变形,使两轮轮齿在进行啮入、啮合、 啮出、脱开的过程中不断改变各自的工作 状态,产生了所谓的错齿运动,从而实现 了主动波发生器与柔轮的运动传递。
谐波齿轮传动及谐波减速器
主讲 周兰
一、谐波齿轮传动的基本构成及特点
1.构成:
谐波齿轮传动是谐波齿轮行星传动的 简称。是一种少齿差行星传动。通常 由刚性圆柱齿轮G、柔性圆柱齿轮R、 波发生器H和柔性轴承等零部件构成。 柔轮和刚轮的齿形有直线三角齿形和 渐开线齿形两种,以后者应用较多 。
谐波齿轮传动构成图例:
四、谐波发生器传动比的计算
1、公式推导(1):
以刚轮固定,柔轮输出为例,推导传 动比的计算公式。 当刚轮固定时,nG=0。如果反过来看, 即将柔轮当做输入,刚轮当做输出, 则:
1、公式推导(2):iFra bibliotekH gb
n g nH nb nH
n g nH 0 nH
i gH
Zb 1 Zg