用单片机实现温度远程显示
基于单片机的室内温度控制系统设计与实现

基于单片机的室内温度控制系统设计与实现1. 本文概述随着科技的发展和人们生活水平的提高,室内环境的舒适度已成为现代生活中不可或缺的一部分。
作为室内环境的重要组成部分,室内温度的调控至关重要。
设计并实现一种高效、稳定且经济的室内温度控制系统成为了当前研究的热点。
本文旨在探讨基于单片机的室内温度控制系统的设计与实现,以满足现代家居和办公环境的温度控制需求。
本文将首先介绍室内温度控制系统的研究背景和意义,阐述其在实际应用中的重要性和必要性。
随后,将详细介绍基于单片机的室内温度控制系统的设计原理,包括硬件设计、软件编程和温度控制算法等方面。
硬件设计部分将重点介绍单片机的选型、传感器的选取、执行机构的搭配等关键环节软件编程部分将介绍系统的程序框架、主要功能模块以及温度数据的采集、处理和控制逻辑温度控制算法部分将探讨如何选择合适的控制算法以实现精准的温度调控。
在实现过程中,本文将注重理论与实践相结合,通过实际案例的分析和实验数据的验证,展示基于单片机的室内温度控制系统的实际应用效果。
同时,还将对系统的性能进行评估,包括稳定性、准确性、经济性等方面,以便为后续的改进和优化提供参考。
本文将对基于单片机的室内温度控制系统的设计与实现进行总结,分析其优缺点和适用范围,并对未来的研究方向进行展望。
本文旨在为读者提供一种简单、实用的室内温度控制系统设计方案,为相关领域的研究和实践提供有益的参考。
2. 单片机概述单片机,也被称为微控制器或微电脑,是一种集成电路芯片,它采用超大规模集成电路技术,将具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种IO口和中断系统、定时器计数器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、AD转换器等电路)集成到一块硅片上,构成一个小而完善的微型计算机系统。
单片机以其体积小、功能齐全、成本低廉、可靠性高、控制灵活、易于扩展等优点,广泛应用于各种控制系统和智能仪器中。
基于单片机的水温水位控制系统设计

四、结论
基于单片机的智能水箱水位和水温控制系统具有结构简单、成本低、可靠性 高等优点。通过实时监测和控制水箱的水位和水温,可以满足不同用户的需求。 此外,通过优化系统的硬件设计和软件设计,可以进一步提高系统的性能和可靠 性。这种系统不仅可以应用于家庭用水领域,也可以应用于工业生产中的液体控 制,具有广泛的应用前景。
1、抗干扰设计
由于环境因素和设备本身的影响,系统可能会受到干扰。因此,需要在硬件 设计和软件设计中加入抗干扰措施,如滤波电路、软件去抖动等。
2、节能设计
为了降低系统的功耗,可以在软件设计中加入休眠模式和唤醒模式。当系统 不需要工作时,可以进入休眠模式,降低功耗。当有数据需要处理时,系统被唤 醒,进入工作状态。
2、软件设计
系统的软件设计主要实现以下功能:数据的采集、处理、显示和控制。首先, 单片机通过水位传感器和水温传感器采集当前的水位和水温数据。然后,单片机 对采集到的数据进行处理,判断水位和水温是否正常。如果异常,则启动相应的 执行机构进行调节。最后,单片机将处理后的数据通过显示模块进行显示。
三、系统优化
六、结论
本次演示设计了一种基于单片机的水温水位控制系统,实现了温度和水位的 自动检测、调节和控制。该系统具有成本低、可靠性高、易于实现等优点,同时 支持远程控制和节能模式等功能。在家庭、工业和科学研究中具有广泛的应用前 景。
参考自动化技术的普及,智能化设备在日常生活和工业生产中 的应用越来越广泛。其中,基于单片机的智能水箱水位和水温控制系统具有重要 应用价值。这种系统可以实现对水箱水位和水温的实时监测和控制,以适应不同 的应用需求。
系统软件采用C语言编写,主要包括以下几个部分:数据采集、数据处理、 控制输出和远程通信。
1、数据采集:通过I/O端口读取DS18B20和超声波水位传感器的数据。
基于单片机的温度智能控制系统的设计与实现共3篇
基于单片机的温度智能控制系统的设计与实现共3篇基于单片机的温度智能控制系统的设计与实现1基于单片机的温度智能控制系统的设计与实现随着人们对生活质量的需求越来越高,温度控制变得愈发重要。
在家庭、医院、实验室、生产车间等场合,温度控制都是必不可少的。
本文将介绍一种基于单片机的温度智能控制系统的设计与实现。
设计思路本文所设计的温度智能控制系统主要由单片机、温度传感器、继电器和液晶屏幕等部件组成。
其中,温度传感器负责采集温度数据,单片机负责处理温度数据,并实现温度智能控制功能。
继电器用于控制加热设备的开关,液晶屏幕用于显示当前温度和系统状态等信息。
在实现温度智能控制功能时,本设计采用了PID控制算法。
PID控制算法是一种经典的控制算法,它基于目标值和当前值之间的误差来调节控制量,从而实现对温度的精确控制。
具体来说,PID控制器包含三个部分:比例控制器(P)用于对误差进行比例调节,积分控制器(I)用于消除误差的积累,微分控制器(D)用于抑制误差的未来变化趋势。
这三个控制器的输出信号加权叠加后,作为继电器的控制信号,实现对加热设备的控制。
系统实现系统硬件设计在本设计中,我们选择了常见的AT89S52单片机作为核心控制器。
该单片机运行速度快、稳定性好,易于编程,并具有较强的扩展性。
为了方便用户调节温度参数和查看当前温度,我们还选用了4 * 20的液晶屏。
温度传感器采用LM35型温度传感器,具有高精度、线性输出特性,非常适用于本设计。
系统电路图如下所示:系统软件设计在单片机的程序设计中,我们主要涉及到以下几个部分:1. 温度采集模块为了实现温度智能控制功能,我们首先需要获取当前的温度数据。
在本设计中,我们使用了AT89S52单片机的A/D转换功能,通过读取温度传感器输出的模拟电压值,实现对温度的采集。
采集到的温度数据存储在单片机的内部存储器中,以供后续处理使用。
2. PID控制模块PID控制模块是本设计的核心模块,它实现了对温度的精确控制。
基于单片机的温度控制系统设计及仿真

三、结论
本次演示设计并仿真了一个基于单片机的温度控制系统。该系统通过AT89C51 单片机实现温度的精确控制,并采用PID算法对加热和散热装置进行实时调节。 仿真结果表明,该系统具有良好的控制性能和稳定性。在实际应用中,
可以根据具体场景选择合适的硬件设备和参数调整策略,以满足不同的温度控 制需求。
本次演示将探讨如何设计一个基于单片机的温度控制系统,并对其进行仿真。
一、系统设计
1、1系统架构
基于单片机的温度控制系统主要由温度传感器、单片机控制器、加热装置和散 热装置四部分组成。温度传感器负责实时监测环境温度,并将模拟信号转换为 数字信号传递给单片机。单片机接收到这个数字信号后,根据预设的控制算法,
时及时停机并报警,保证系统的安全运行。未来研究方向可以包括进一步优化 控制算法、加入更多的智能化功能以及拓展应用领域等。
谢谢观看
通过深入研究以上方面,有望进一步提高基于单片机的温度控制系统的性能和 可靠性。
参考内容
摘要本次演示旨在设计一种基于单片机的温度控制系统,以提高温度控制的精 度和稳定性。首先,本次演示将介绍温度控制系统的重要性及其在工业生产和 日常生活中的应用。接着,通过对现有技术的分析,指出其存在的不足和缺陷。
二、系统仿真
为了验证系统的有效性,我们使用MATLAB对系统进行仿真。通过设定不同的 温度控制目标,我们可以观察系统的响应时间、稳定性和控制精度。在 MATLAB中,我们可以用S函数来描述控制系统的动态行为。通过调整PID参数, 我们可以观察系统在不同控制策略下的表现。
仿真结果表明,该基于单片机的温度控制系统在PID算法的控制下,能够快速、 准确地达到设定温度,并保持良好的稳定性。
软件设计软件部分采用C语言编写,主要包括数据采集、数据处理和控制输出 三个模块。数据采集模块负责读取温度传感器的数据,并进行初步处理;数据 处理模块根据预设的控制算法对采集到的温度数据进行计算,得到控制输出信 号;
远程温度监测系统设计本科论文

题目远程温度监测系统设计学生姓名学号所在学院物理与电信工程学院专业班级电子信息工程1204 指导教师完成地点博远楼2016 年 6 月18日毕业论文﹙设计﹚任务书院(系) 物电学院专业班级电子信息工程学生姓名一、毕业论文﹙设计﹚题目远程温度监测系统设计二、毕业论文﹙设计﹚工作自___2016__年__ 2 _月_ 20_日起至__ 2016__年 6 月_ 20 _日止三、毕业论文﹙设计﹚进行地点: 物电学院实验室四、毕业论文﹙设计﹚的内容要求:温度远程监控在工业控制领域中有着十分重要的意义,在许多工业场合,需要对一些分散的、无人值守的现场温度数据进行定实时采集,同时发送简单的控制命令。
传统温度远程监控系统的实现方式一般都需要自己建设并维护有线或无线网络,维护费用高。
随着通信技术的发展,原有的远程监控系统已日益不能满足多方面的要求,温度数据无线传输设计。
系统主要由现场温度监测端,数据传输模块和监控端组成,数据的传输由NRF24L01模块完成。
具体要求如下:1、用微处理器(单片机或ARM)控制监控现场的温度信息采集和数据发送;2、采用温度传感器DS18B20和无线收发模块NRF24L01对试验现场温度数据进行远程无线测量和控制;3、完成系统的软件硬件设计;五、毕业论文﹙设计﹚应收集资料及参考文献:[1]黄贤武,郑筱霞.传感器原理及其应用[M].成都:电子科技大学出版社, 2010.[2]俞国亮.MCS-51单片机原理与应用[M].北京:清华大学出版社,2010.[3]李斯伟,雷新生.数据通信技术[M].北京:人民邮电出版社,2009.[4]谢自美.电子线路设计实验测试[M].武汉:华中科技大学出版社,2010.六、进度安排:2月20日─3月1日:查阅资料、完成英文资料翻译并准备开题报告. 3月2日─4月1日:完成开题报告,完成监控系统的监控软件设计.4月2日─5月1日:完成监控系统的硬件系统设计. 5月2日─5月30日:搭建硬件系统并进行测试验证. 准备验收。
基于单片机的粮仓温湿度远程监控系统的设计
www�ele169�com | 5电子科技0 引言随着大数据时代脚步的不断加快,国家粮食管理对粮食温度、湿度的控制也越来越严格,并不断使用现代化科技,从而实现监控系统的智能化。
传统粮仓管理需管理员对粮仓进行定期实地观察,采集与记录粮仓的温度与湿度的相关数据,再对数据进行一系列分析与研究,最后决定是否给予仓库通风。
这种工作方式效率低下,且随意性较强,难以实现对粮仓温湿度的准确控制,投资成本较大。
另一方面,国人对粮食的巨大需求对粮仓管理工作又提出了高标准与新要求,基于此,粮仓管理的相关部门及工作人员需结合现代传感器技术、计算机技术及通信技术,对粮仓环境进行远程监控与管理。
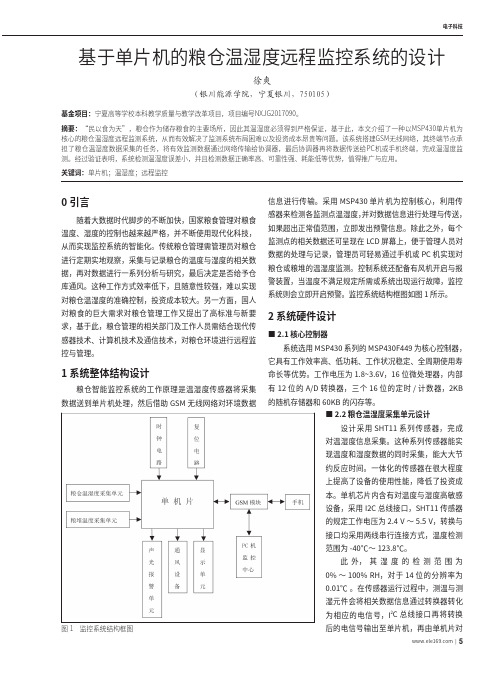
1 系统整体结构设计粮仓智能监控系统的工作原理是温湿度传感器将采集数据送到单片机处理,然后借助GSM 无线网络对环境数据信息进行传输。
采用MSP430单片机为控制核心,利用传感器来检测各监测点温湿度,并对数据信息进行处理与传送,如果超出正常值范围,立即发出预警信息。
除此之外,每个监测点的相关数据还可呈现在LCD 屏幕上,便于管理人员对数据的处理与记录,管理员可轻易通过手机或PC 机实现对粮仓或粮堆的温湿度监测。
控制系统还配备有风机开启与报警装置,当温度不满足规定所需或系统出现运行故障,监控系统则会立即开启预警。
监控系统结构框图如图1所示。
2 系统硬件设计■2.1 核心控制器系统选用MSP430系列的MSP430F449为核心控制器,它具有工作效率高、低功耗、工作状况稳定、全周期使用寿命长等优势。
工作电压为1.8~3.6V,16位微处理器,内部有 12位的 A/D 转换器,三个16位的定时/计数器,2KB的随机存储器和60KB 的闪存等。
■2.2 粮仓温湿度采集单元设计设计采用SHT11系列传感器,完成对温湿度信息采集。
这种系列传感器能实现温度和湿度数据的同时采集,能大大节约反应时间。
一体化的传感器在很大程度上提高了设备的使用性能,降低了投资成本。
基于单片机的远程红外标温度调节器设计

发射机进入发信状态 。 按键经P T2 2 6 2 编码 、 键 控电路 , 功率放大 , 通 过天 线发射 电磁波 。 电源供 电为4 . 5 V, 采用 3 节7 号干 电池供 电, 作
用距 离大于2 K M。 1 . 2接 收 解码部 分 接收解码部分主要 由接收天线 、 天线匹配网络、 信号放大 、 接收 机和解码 电路构成 , 其电路图如( 图2 ) 所示。 天线收到遥控器 发出的 指令信号后 , F M接收机解调除指令脉冲串, 经L M3 5 8 放 大整形后送 解码芯 片P T 2 2 7 2 解 出相 关指令 , 送D 0 - D1 口输出给单片机 。 1 . 3调 压部 分 单片机采用抗干 扰能力强的飞利浦微处理器P 8 7 L PC 7 6 X, 扫 压 的控 制( 电源 的开通/ 关闭 , 增量调压 , 减量 调压) 。 同步检 测电路
角, 完 成 远程 无 线遥 控 对 2 2 0 V 交 流 电源 的调 压 输 出 , 调 整 红 外 源 的
缩短任务准备时间, 解决装备站点对 远距离红外标 温度 的实时调节 温 度 和 进 行 开 关机 控 制 。 1 . 1遥 控 器 部 分 是 问题 关 键 。
1系统 组成 与硬 件 设计
[ 1 ] 沙 占有。 孟永 志, 王延鹏. 单片机 外围电路设计[ M ] . 北京: 电子工业
出版 社 , 2 0 0 6 : 3 4 — 4 5 .
工 业 出版 社, 2 0 0 6 : 7 8 - 8 2 .
描程序查询解码信号确定键值执行相应程序, 完成对红外源 电源 电 [ 2 ] 祁伟, 杨亭. 单片机 C 5 1程序设 计教 程与实验[ H ] . 北京: 北京航天 采用光藕MOC 3 0 2 3 隔离形成1 0 0 HZ 脉冲 , 送单片机作为 中断源 。 单 [ 3 ] 梁廷贵. 遥控 电路可控硅触发 电路语音 电路分册[ M ] . 北京: 科 学技 2 0 0 2 : 2 1 - 2 5 . 片机产生中断后 , 执行定时程序 , 形成移 向触发脉冲 , 通过光 电耦合 术文 献 出版 社 , 器4 N3 3 隔离触 发电路触 发可控硅 。 控制定时时间( 触发 角度 ) , 即控 [ 4 ] 郭锐, 吴明光, 张玉润. 主从 式 白炽灯数 字调光器 的设计[ J ] . 中国照 制了可控硅的导通和截止 , 实现调压 目的。 BC D 拨盘开关用于设定
单片机在温控系统中的应用

单片机在温控系统中具有较好的应用效果,能够实现精确的 温度控制和快速响应。但在实际应用中,还需要根据具体需 求进行优化和改进。
THANKS
谢谢您的观看
实现远程监控和操作
单片机可以通过通信接口与其他设备 进行通信,实现远程监控和操作。
提高系统的稳定性和可靠性
单片机具有强大的数据处理能力和故 障诊断功能,可以提高系统的稳定性 和可靠性。
03
单片机在温控系统中的应用方 案
基于单片机的温度采集与处理方案
01
02
03
温度传感器选择
选择合适的温度传感器, 如热电阻、热电偶等,用 于采集温度数据。
单片机选择与接口设计
单片机类型
根据温控系统的功能和性能要求,选择合适的单片机型号,如51单片机、AVR 单片机等。
接口设计
设计单片机的接口电路,包括电源电路、时钟电路、I/O接口等,以便与温度传 感器和其他外围设备进行通信。
电源电路设计
电源类型
选择合适的电源类型,如干电池、锂电池等,根据系统功耗和稳定性要求进行选 择。
单片机在温控系统中的应用
汇报人: 日期:
目录
• 引言 • 单片机在温控系统中的应用背
景 • 单片机在温控系统中的应用方
案 • 单片机在温控系统中的硬件设
计
目录
• 单片机在温控系统中的软件设 计
• 单片机在温控系统中的应用效 果评估
01
引言
温控系统概述
温度控制的重要性
温度是工业生产和日常生活中非常重 要的参数,温度控制对于保证产品质 量、提高生产效率、保障人体舒适等 方面都具有重要意义。
输出控制
单片机根据控制算法计算出的控制量 ,输出控制信号,如PWM信号或模 拟信号,以控制加热元件或制冷元件 的功率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工程设计介绍用8051单片机实现的99秒马表计时系统,系统充分利用了8051各种内部资源,使得整个系统的软硬件设计相对简化,易于实现。
关键字:8051单片机马表Abstract:In this article,a kind of 99s stopwatch system on basis of the 8051Mictoconrtoller is introduced. The hardware design and softwaredesign of the system are simplified by making good use of the internalresources of the 8051Microcontroller. It can easily be realized and hasbroad applied fields.Keywords:8051Microcontroller stopwatch一.实现功能系统从0开始计时,到99后再循环,触动一次开关为开始计时信号,触动第二次后暂停计时,触动第三次后清零。
二.设计概要该系统以8051单片机为主芯片,通过两个LED数码管显示计时输出的时间,通过开中断实现按键的读取。
此外设有加电和手动复位功能,以便出现系统错误时进行复位。
三.器件介绍1. 8051单片机8051单片机内部结构8051是MCS-51系列单片机的典型产品, 8051单片机包含中央处理器、程序存储器(ROM)、数据存储器(RAM)、定时/计数器、并行接口、串行接口和中断系统等几大单元及数据总线、地址总线和控制总线等三大总线,现在分别加以说明:·中央处理器:中央处理器(CPU)是整个单片机的核心部件,是8位数据宽度的处理器,能处理8位二进制数据或代码,CPU负责控制、指挥和调度整个单元系统协调的工作,完成运算和控制输入输出功能等操作。
·数据存储器(RAM)8051内部有128个8位用户数据存储单元和128个专用寄存器单元,它们是统一编址的,专用寄存器只能用于存放控制指令数据,用户只能访问,而不能用于存放用户数据,所以,用户能使用的RAM只有128个,可存放读写的数据,运算的中间结果或用户定义的字型表。
图1·程序存储器(ROM):8051共有4096个8位掩膜ROM,用于存放用户程序,原始数据或表格。
·定时/计数器(ROM):8051有两个16位的可编程定时/计数器,以实现定时或计数产生中断用于控制程序转向。
·并行输入输出(I/O)口:8051共有4组8位I/O口(P0、P1、P2或P3),用于对外部数据的传输。
·全双工串行口:8051内置一个全双工串行通信口,用于与其它设备间的串行数据传送,该串行口既可以用作异步通信收发器,也可以当同步移位器使用。
·中断系统:8051具备较完善的中断功能,有两个外中断、两个定时/计数器中断和一个串行中断,可满足不同的控制要求,并具有2级的优先级别选择。
·时钟电路:8051内置最高频率达12MHz的时钟电路,用于产生整个单片机运行的脉冲时序,但8051单片机需外置振荡电容。
单片机的结构有两种类型,一种是程序存储器和数据存储器分开的形式,即哈佛(Harvard)结构,另一种是采用通用计算机广泛使用的程序存储器与数据存储器合二为一的结构,即普林斯顿(Princeton)结构。
INTEL的MCS-51系列单片机采用的是哈佛结构的形式,而后续产品16位的MCS-96系列单片机则采用普林斯顿结构。
下图是MCS-51系列单片机的内部结构示意图2。
图28051的引脚说明:MCS-51系列单片机中的8031、8051及8751均采用40Pin封装的双列直接DIP结构,右图是它们的引脚配置,40个引脚中,正电源和地线两根,外置石英振荡器的时钟线两根,4组8位共32个I/O口,中断口线与P3口线复用。
现在对这些引脚的功能加以说明:如图3:Pin9:RESET/V pd复位信号复用脚,当8051通电,时钟电路开始工作,在RESET引脚上出现24个时钟周期以上的高电平,系统即初始复位。
初始化后,程序计数器PCP0-P3输出口全部为高电平,堆栈指针写入07H,其它专用寄存器被清“0”。
RESET由高电平下降为低电平后,系统即从0000H地址开始执行程序。
然而,初始复位不改变RAM(包括工作寄存器R0-R7)的状态,8051的初始态。
8051单片机8051的复位方式可以是自动复位,也可以是手动复位,见下图3。
此外,RESET/V pd还是一复用脚,V cc掉电其间,此脚可接上备用电源,以保证单片机内部RAM的数据不丢失。
图3·Pin30:ALE/当访问外部程序器时,ALE(地址锁存)的输出用于锁存地址的低位字节。
而访问内部程序存储器时,ALE端将有一个1/6时钟频率的正脉冲信号,这个信号可以用于识别单片机是否工作,也可以当作一个时钟向外输出。
更有一个特点,当访问外部程序存储器,ALE会跳过一个脉冲。
如果单片机是EPROM,在编程其间,将用于输入编程脉冲。
·Pin29:当访问外部程序存储器时,此脚输出负脉冲选通信号,PC的16位地址数据将出现在P0和P2口上,外部程序存储器则把指令数据放到P0口上,由CPU读入并执行。
程序存储器的内外部选通线,8051和8751单片机,内置有·Pin31:EA/Vpp4kB的程序存储器,当EA为高电平并且程序地址小于4kB时,读取内部程序存储器指令数据,而超过4kB地址则读取外部指令数据。
如EA为低电平,则不管地址大小,一律读取外部程序存储器指令。
显然,对内部无程序存储器的8031,EA 端必须接地。
在编程时,EA/V脚还需加上21V的编程电压。
pp2.七段共阴LED数码管七段共阴数码管由七个发光二极管(LED)和一个小数位灯组成,LED由特殊的半导体材料砷化镓、磷砷化镓等组成。
分段式显示器(LED数码管)由7条线段围成8字型,每一段包含一个发光二极管,外加正电压时二极管导通,通过不同的配合显示出所要的数字。
LED数码管有共阳、共阴之分,如图所示位共阴数码管,其所有二极管的阴极共用一端,使用时,公共阴极接地,7个阳极a~g由对应的端口驱动,下表为分别显示0~9时对应的输入:共阴LED数码管四.硬件电路总电路如下:1.复位电路复位电路图电路图如上所示,采用上电或开关复位,原理是通过电容的充放电实现,当系统出现异常时,可以通过开关复位使其正常。
2.时钟电路时钟电路图如上图所示,该电路采用12MHz晶振,用C2、C3增强抗干扰能力,选10pF~50pF之间的电容即可。
由于该系统用的是12MHz的晶振,所以振荡周期为1/12μS,一个振荡脉冲为一个拍节,振荡脉冲经过二分频后就是单片机的时钟信号,即一个时钟信号包括两个振荡脉冲,每两个振荡周期就组成状态周期,状态周期是完成一种微机操作的周期。
机器周期包括6个状态周期,是指完成一种基本操作的周期,所以机器周期为1μS。
3.数码管接口电路数码管接口电路如上图所示:把“单片机系统”区域中的P0.0-P0.7端口用8芯排线连接到数码管1的a-dp端口上,要求:P0.0对应着a,P0.1对应着b,……,P0.7对应着dp;“单片机系统”区域中的P2.0-P2.7端口用8芯排线连接到数码管2的a-h端口上,要求同上,共阴级接地。
4.中断输入电路中断输入电路如上图所示,系统采用从T0口读取中断形式,直接用开关与地相连,当开关闭合时,端口输入为低电位。
五.软件系统主程序框图T0中断服务程序框图汇编源程序主程序TCNTA EQU 30H 初始化数据TCNTB EQU 31HSEC EQU 32HKEYCNT EQU 33HSP1 BIT P3.5 中断输入位ORG 00HLJMP START 为复位做准备ORG 0BHLJMP INT_T0START: MOV KEYCNT,#00HMOV SEC,#00HMOV A,SECMOV B,#10 被除数赋值DIV AB 除10后便于十进制输出MOV DPTR,#TABLEMOVC A,@A+DPTRMOV P0,A 输出十位MOV A,BMOV DPTR,#TABLEMOVC A,@A+DPTRMOV P2,A 输出个位MOV TMOD,#02H 设T0计数器为方式2工作方式SETB ET0 允许t0中断SETB EA 开中断允许总控位WT: JB SP1,WTLCALL DEL Y10MS 延时,防止干扰信号JB SP1,WT 延时后再次测输入信号INC KEYCNTMOV A,KEYCNTCJNE A,#01H,KN1 是否触发开始计时SETB TR0 启动定时器T0MOV TH0,#06H 送初值MOV TL0,#06H 送重装初值MOV TCNTA,#00HMOV TCNTB,#00HLJMP DKNKN1: CJNE A,#02H,KN2 是否触发暂停CLR TR0 关闭定时器T0LJMP DKNKN2: CJNE A,#03H,DKN 是否触发清零清零程序段MOV SEC,#00HMOV A,SECMOV B,#10DIV ABMOV DPTR,#TABLEMOVC A,@A+DPTRMOV P0,AMOV A,BMOV DPTR,#TABLEMOVC A,@A+DPTRMOV P2,AMOV KEYCNT,#00HDKN: JNB SP1,$LJMP WT延时程序段DEL Y10MS:MOV R6,#20D1: MOV R7,#248DJNZ R7,$DJNZ R6,D1RET中断服务程序INT_T0:INC TCNTAMOV A,TCNTACJNE A,#100,NEXT 判断时间间隔是否达到0.1sMOV TCNTA,#00HINC TCNTBMOV A,TCNTBCJNE A,#4,NEXTMOV TCNTB,#00HINC SECMOV A,SECCJNE A,#100,DONE 判断计时是否达到100MOV SEC,#00HDONE: MOV A,SEC 输出显示MOV B,#10DIV ABMOV DPTR,#TABLEMOVC A,@A+DPTRMOV P0,AMOV A,BMOV DPTR,#TABLEMOVC A,@A+DPTRMOV P2,ANEXT: RETI 中断返回输出数字查表TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FHEND程序说明1)主程序中T0初始化程序段如下:SETB TR0 启动定时器T0MOV TH0,#06H 送初值MOV TL0,#06H 送重装初值其中初试值为6,且系统所用的的时12MHz的晶体振荡,所以计算得计数脉冲为:(256-6)×12/12=250μS,所以后面要用400(400×250=100000μS=0.1S)作为计数循环,以实现0.1秒的间隔。