大小球分拣系统设计.docx
大、小球分拣传送机械控制系统设计
XXXXX学院课程设计说明书设计题目: 大、小球分拣传送机械控制系统设计学生姓名:XXXXX学号:XXXXX专业班级:XXXXX指导教师:XXXXX2012 年12 月12 日内容摘要机电一体化产品的积极作用正日益为人们所认识,如本设计产品机械手,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的筛选与传送。
而且它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。
因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用,尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。
在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
在生产过程中,经常要对流水线上的产品进行分拣,本课程设计拟设计大小球分拣传送机控制系统的PLC设计,采用的德国西门子 S7-200 系列(cpu-224)PLC,对机械臂的上下、左右以及抓取运动进行控制,用于分捡大小球的机械装置。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。
关键词:大小球分拣控制系统; PLC设计;机械手目录第1章引言 (1)1.1 大、小球分拣传送机械控制系统设计内容简介 (1)1.2 大、小球分拣传送机械控制系统设计要求 (1)1.3 大、小球分拣传送机械控制系统设计思想 (2)第2章大、小球分拣传送系统的硬件电路设计 (3)2.1 大、小球分拣传送系统功能说明 (3)2.2 设计主电路原理图 (3)2.3 机械臂分拣大、小球控制的运行框图 (4)2.4 确定I/O信号数量,选择PLC的类型 (4)2.5 机械臂分拣大、小球控制的电器元件I/O分配表 (5)2.6 机械臂分拣大、小球控制的I/O接线图 (5)第3章大、小球分拣传送系统的程序设计 (8)3.1 机械臂分拣大、小球控制程序的梯形图 (8)3.2 机械臂分拣大、小球控制程序的指令表 (11)第4章软件硬件调试 (13)结论 (16)设计总结 (17)谢辞 (18)参考文献 (19)第1章引言1.1 大、小球分拣传送机械控制系统设计内容简介学院此次安排我们进行了为其两周的机电传动课程设计实习,对我们即将进行毕业设计是很有益处的。
大小球分拣系统设计
机床电气与PLC技术课程设计与实训说明书姓名:李泊岑班级: 13101703学号: 1310111018专业:机械电子工程组别:十六组日期:2015.12.21-2015.12.31指导教师:王伟成绩:目录前言 (3)一、题目 (5)1.1示大小球分拣系统设计 (6)二、解答 (7)2.1 确定输入输出量 (7)2.2 PLC的选型原则 (7)2.3工作原理 (7)2.4 I/O分配表 (8)2.5功能表图 (9)2.6梯形图 (12)2.7语句表 (13)三、实训总结 (14)参考文献 (15)前言在现在化的生产中,生产机械的自动化程度反映了工业生产发展的水平。
现代化的生产设备与系统已不再是传统意义上单纯的机械系统,而是机电一体化的综合系统电气传动与控制系统已经成为现代生产机械的重要组成部分。
机与电,传动与控制已经成为不可分割的整体。
所谓的机电传动,是指以电动机为原动机驱动生产机械的系统的总称,它的目的是将电能转变为机械能,实现生产机械的启动,停止以及速度调节,完成各种生产工艺过程的要求,保证生产过程的正常进行。
机电传动控制系统所要完成的任务,从广义上讲,就是要使生产机械设备,生产线,车间,甚至整个工厂都实现自动化;从狭义上讲,则指通过控制电动机驱动生产机械,实现生产产品数量的曾加,质量的提高,生产成本的降低,工人劳动的条件的改善的以及能量的合理利用。
机电传动以及控制系统总是随着社会生产的发展而发展的。
单就机电而言,它的发展大体上经历了成组拖动,单电动机拖动和多电动机拖动三个阶段。
所谓成组拖动,就是一台电动机拖动一根天轴,再由天轴通过皮带轮和皮带分别拖动各生产机械,这种生产方式效率低,劳动条件差,一旦电动机放生故障,将造成成组机械的停车;所谓但电动机的拖动,就是用一台电动机拖动一台生产机械,它虽然较成组拖动前进了一步,但当一台生产机械的运动部件较多时,机械传动机构复杂;多电动机拖动,即是一台生产机械的每一个运功部件分别由一台电动机拖动,这种拖动的方式不仅大大的简化了生产机械的传动机构,而且控制灵活,为生产机械的自动化提供了有利的条件,所以,现在化机电传动基本上均采用这种拖动形式。
plc大小球分拣系统课程设计
学院Henan Polytechnic Institute 毕业设计(论文)题目__________班级__________姓名__________指导教师__________前言系统在社会各行各业如:物流配送中心、邮局、采矿、港口、码头、仓库等行业得到广泛运用,分拣系统能够大大提高企事业单位该环节的生产效率。
机械臂自动分拣机构的积极作用正日益为人们所认识,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的筛选与传送。
因为它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐,因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用,尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。
在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
在生产过程中,经常要对流水线上的产品进行分拣,本课程设计拟设计大小球分拣传送机控制系统的PLC设计,采用的德国西门子S7-200 系列(cpu-224)PLC,对机械臂的上下、左右以及抓取运动进行控制,用于分捡大小球的机械装置。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。
关键词:大小球分拣控制系统;PLC;行程开关目录第1章设计内容 (3)1.1 大小球分拣传送机械控制系统设计内容简介 (3)1.2 大小球分拣传送机械控制系统功能分析 (4)第2章大小球分拣传送系统的硬件电路 (5)2.1按控制要求进行功能分析 (5)2.2确定I/O信号数量,选择P LC的类型 (6)2.3分拣大小球控制的I/O接线图 (6)2.4分拣大小球控制的电器元件配置表 (7)第3章大小球分拣传送系统的软件设计 (8)3.1分拣大小球控制的运行框图 (8)3.2分拣大小球控制程序的梯形图 (9)3.3分拣大小球控制程序的指令表 (11)第4章软件硬件调试 (14)心得体会 (14)参考文献 (15)第1章设计内容1.1 大小球分拣传送机械控制系统设计内容简介学院此次安排我们进行了电气自动化的毕业设计,对我们系统总结学习知识是很有益处的。
基于PLC的大小球分拣系统设计
出端口上搭建一个 H 桥来实现控制电机的左转和右转。将原
理调试好的程序改写成有两个端口输出来控制电机的右转, 即现在采用的Y10、Y12控制电机右转。同样采用Y11、Y13控
制电机的左转。
控制小球移动的主要功能梯形图中,当下限位闭合的时 候,机械臂将会走小球分支,让置位线圈 S22 得电,电磁铁 开始吸小球,并且Y3的闭合,使到与组态连接的M103得电, 同时与组态进行实时的数据监控,时间继电器T1开始计时时 间为1S。对部分指令程序调试如下1.3所示。
2.设计内容
当输送机处于起始位置时,上限位开关和左限位开关开 关处于闭合的状态,原位指示灯此时闪亮。启动装置后,捡
球装置下行。如果电磁铁碰到大球时上限位动作,而下限位
开关不动作;如果电磁铁碰到小球时下限位开关动作。电磁 铁下降后电磁铁吸球,吸到球后上升,到上限位后机械臂右 移动。如果吸的是小球,则机械臂到小球位,电磁杆下降, 电磁铁失电释放小球到小球的箱子。如果吸取的是大球,则
机械臂到大球位,电磁杆下降,电磁铁失电释放大球到大球
的箱子。吸起小球后,则捡球装置向上行,碰到上
限位开关后,捡球装置向右行;碰到右限位开关(小球
的右限位开关)后,再返回到原位。如果吸起的是大球,捡 球装置右行碰到另一个右限位开关(大球的右限位开关)后, 再向下行,碰到下限位开关后,将大球释放到小球箱里,然 后返回到原位。 然而,在设计机械臂的时候,左限位、小球限位开关和 大球的限位开关的放置,影响到机械臂的移动是否能够触及
到限位开关。所以要对电机上的位置,选定好要设计的左限
位开关、小球限位开关、大球限位开关。并能按照给定的程 序,机械臂能够及时的碰及到限位开关,能够更好的控制好 大小球的分拣。
大小球分拣系统示意图如图1.1所示。
大小球自动分拣装置设计
1 绪论工业生产的各个领域,无论是过程控制系统还是传动控制系统,都包含着大量的开关量和模拟量。
开关量也称数字量,如电动机的启停、阀门的开闭、电子线路的转置位与复位、计时、计数等;模拟量也称连续量,如不断变化的温度、压力、速度、流量、液位等。
从生产机械所应用的电器与控制方法看,最初是采用一些手动电器来控制执行电器,这类手动控制适用于一些容量小、操作单一和场合。
随后发展为采用自动控制电器的继电-接触器控制系统。
这种控制系统的特点是结构简单,价格低廉,维护方便,抗干扰强,因而广泛应用于各类机械设备上。
但由于该控制形式是固定接线,通用和灵活性差,又由于采用有触点的开关动作,工作频率低,触点易损坏,可靠性差。
随着生产力的发展和科学技术的进步,人们对所用控制设备不断提出新的要求。
具有程序变更容易、程序存储量大、通用性强等优点的由集成电路组成的顺序控制器应运而生。
所谓顺序控制,是以预先规定也的时间或条件为依据,按预先规定好的动作次序,对控制过程各阶段顺序地进行以开关量为主的自动控制。
曾经流行的顺序控制器主要有3种类型:基本逻辑型、条件步进型和时间步进型。
其特点是:通用性和灵活性强,通过更改程序可以很方便地适应经常更改的控制要求,容易对大型、复杂系统进行控制,但程序的实现和更改方式并没有从本质上改变,仍然是对硬件进行设置和更改。
1.1 选题背景1969年,结合计算机技术与继电器接触控制技术诞生出了可编程逻辑控制器( ) ,它具有逻辑控制、定时、计数等功能,并取代了继电-接触器控制。
采用计算机存储程序和顺序执行的原理;编程语言采用直观的类似继电-接触器控制电路图的梯形语言,这使得控制现场的工作人员可以很容易地学习和使用。
控制程序的更改可以通过直接改变存储器中的应用软件来实现,由于软件的更改极易实现,从而在实现方式上有了本质的飞跃,其通用性和灵活性进一步增强。
随着时代的发展技术也在不断的发展,相继出现了以微处理器为核心的可编程序控制( )和由中央微处理器()、大规模集成电路、电子开关、功率输出器件等组成的可编程控制器( )。
大小球分拣
题目:大、小球分类选择传送PLC控制
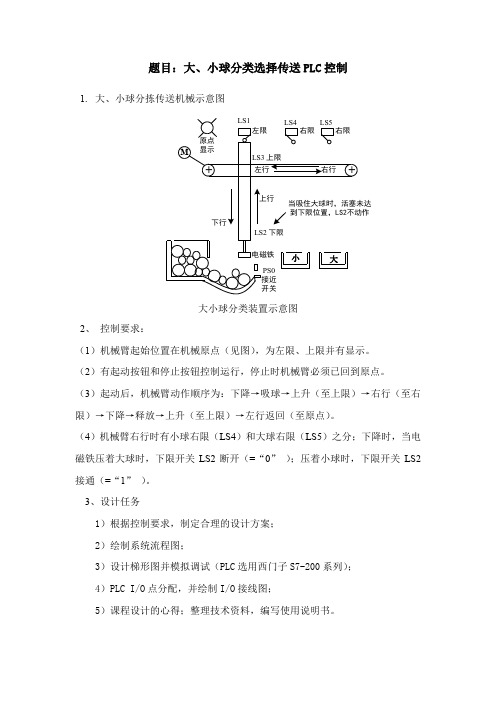
1.大、小球分拣传送机械示意图
大小球分类装置示意图
2、控制要求:
(1)机械臂起始位置在机械原点(见图),为左限、上限并有显示。
(2)有起动按钮和停止按钮控制运行,停止时机械臂必须已回到原点。
(3)起动后,机械臂动作顺序为:下降→吸球→上升(至上限)→右行(至右限)→下降→释放→上升(至上限)→左行返回(至原点)。
(4)机械臂右行时有小球右限(LS4)和大球右限(LS5)之分;下降时,当电磁铁压着大球时,下限开关LS2断开(=“0”);压着小球时,下限开关LS2接通(=“1”)。
3、设计任务
1)根据控制要求,制定合理的设计方案;
2)绘制系统流程图;
3)设计梯形图并模拟调试(PLC选用西门子S7-200系列);
4)PLC I/O点分配,并绘制I/O接线图;
5)课程设计的心得;整理技术资料,编写使用说明书。
大小球分拣系统
滁州职业技术学院机电系毕业设计题目:大小球分拣控制系统系部:机电工程系班级:机电一体化(2)班*名:**学号: ***********大小球分拣控制系统摘要大、小球分拣传送以其对人们生活的积极影响特别是在工业上的普遍应用不断被人们所认识,作为可操控机械,它能够部分地代替人的劳动并能达到生产工艺的要求,遵循事先设定的步骤来完成工件的分拣传送,大大地节省了人类的劳动时间,更因其能适应复杂的环境,从而改善了人们的工作环境。
随着科技的不断发展,在工业领域其应用范围不断增加,并取得了一定的成果在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
在生产过程中,经常要对流水线上的产品进行分捡,本课题拟开发物料搬运机械手,采用OMRON公司的CPMIA-20CDR-A-V1系列PLC,对机械手的上下、左右以及抓取运动进行控制。
用于分捡大小球的机械装置。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高劳动生产率和自动化水平。
工业生产中经常出现的笨重工件的搬运和长期频繁,单调的操作,如果没有机械手那么工人的劳动强度是很高的,有时候还要用行车员工件,生产速度大大延缓,这种情况采用机械手是很有效的。
此外,它能在高温、低温、深水、宇宙、反射性和其他有毒、有污染环境条件上进行操作。
更显其优越性,有着广阔的发展前关键词:机械手、 PLC、大小球改善、自动化致谢毕业设计得以完成,要感谢的人实在太多了,首先要感谢指导老师,因为毕业设计是在冯巧红老师的悉心指导下完成的。
冯老师渊博的专业知识,严谨的治学态度,精益求精的工作作风,诲人不倦的高尚师德,严以律己、宽以待人的崇高风范,朴实无华、平易近人的人格魅力对我影响深深。
在我做毕业设计的每个阶段,从选题到查阅资料,毕业设计提纲的确定,中期毕业设计的修改,后期毕业设计格式调整等每一步都是在冯老师的悉心指导下完成的。
大小球自动分拣系统

摘要进入二十一世纪之后,随着人类对科学技术知识的掌握达到了一个新的高度,越来越多的知识转化为实际生产力后,一大批新技术,新设备开始应用在各个领域的生产中。
为了节省生产资料和人工成本,工业机器人及其自动控制系统开始大量装备在工厂里的生产流水线上。
机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,其积极作用正日益为人们所认识,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送。
许多发达国家十分对它重视,并投入了大量的人力物力加以研究和应用。
在我国,自主研发的工业机器人在近几年来也有较快的发展,并取得一定的成果。
在生产过程中,经常要对流水线上的产品进行分捡,为了提高生产效率,本设计拟开发物料搬运机械手,采用的德国西门子S7-200系列PLC,对机械手的上下、左右以及抓取运动进行控制,来设计一种用于分捡大小球的机械装置。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作,目标是使此系统具有自动化程度高、运行稳定、精度高、易控制的特点,可根据不同对象,稍加修改本系统即可实现要求。
关键词:PLC大小球机械手AbstractEnter after twenty-first Century, along with human knowledge of science and technology has reached a new height, more and more knowledge into practical productivity, a large number of new technology, new equipment applied in various fields of production. In order to save the production data and labour cost, industrial robots and automatic control system to begin a large number of equipment in the factory production line. The manipulator is the earliest industrial robot, is the earliest modern robot, it can replace people arduous labor to realize the production mechanization and automation, its positive role is increasingly recognized, it can partially replace human labor and can meet the production process requirements, follow certain program, time and location to complete workpiece transfer. Many developed countries are on it seriously, and put a lot of manpower and material resources to study and apply. In our country, the independent research and development of industrial robot in recent years have rapid development, and achieved certain results.In the production process, often on assembly line products of sorting, in order to improve production efficiency, this design aims to develop a manipulator, by German Siemens S7-200series PLC, the mechanical hand on, around and grabbing motion control, to design the size of the ball for sorting machine. We use the programmable technology, combined with the corresponding hardware device, control manipulator to complete a variety of actions, the target is to make this system has a high degree of automation, stable operation, high precision, easy to control, according to different object, minor modifications to the system can reach the requirements.Key words: PLC Size of spherical Manipulator目录摘要 (I)Abstract (II)1 绪论 (1)1.1 课题的背景意义 (1)1.2 课题的目的及要求 (4)1.3 课题目前的发展状况 (4)1.4 设计内容及要求 (5)2 可编程控制器概述 (6)2.1 PLC的产生与定义 (6)2.2 PLC的基本组成及其作用 (7)2.3 PLC的发展 (10)2.4 PLC的应用领域 (15)2.5 PLC的特点 (17)3 大小球分拣系统的控制系统设计 (19)3.1 PLC控制系统设计的原则与内容 (19)3.2 PLC的选型 (19)3.3 大小球分拣系统的功能 (20)3.4 设计思想 (20)3.5 系统的结构 (21)3.6 I/O编址 (22)3.7 机械手分拣系统的接线图 (23)4 大小球分拣系统的软件设计 (24)4.1 自动分拣大小球系统控制程序工作框图 (24)4.2 梯形图概述 (25)4.3 机械手分拣大小球控制程序的梯形图 (26)结论 (27)致谢 (28)参考文献 (29)附录 (30)1 绪论1.1 课题的背景意义自动分拣系统(Automated Sorting System)是二次大战后率先在美国、日本的物流中心中广泛采用的一种自动化作业系统,该系统目前已经成为发达国家大中型物流中心不可缺少的一部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计(论文)题目:大小球分拣系统设计设计名称:机电传动控制班级学号:0901014123学生姓名:阳剑剑指导教师:李岩2011年12月24日“机电传动控制”课程设计任务书第十一组1.设计题目:大小球分拣系统设计2.设计内容:1)完成《指导书》中要求的工作循环2)要求有四种工作方式:手动、回原点、单周期、连续。
3)连续时,循环5次结束,声光间断报警5秒。
3.设计要求:1)画出端子分配图2)设计并调试PLC控制梯形图3)设计说明书4.进度安排:1)理解题目要求,查阅资料,确定设计方案1天2)PLC梯形图设计与调试3天3)说明书撰写0.5天4)答辩0.5天指导教师:专业负责人:主管院长:年月日目录0 前言 (3)1 课程设计的任务和要求 (4)1.1 课程设计的任务 (4)1.2 课程设计的基本要求 (5)2 总体设计 (6)2.1 PLC的选型 (6)2.2 I/O端口图 (7)3 PLC程序设计 (8)3.1 设计思想 (8)3.2 顺序功能图 (8)3.3 PLC梯形图 (10)4 程序调试说明 (20)5 结束语 (21)6 参考文献 (21)0 前言机械手的积极作用正日益为人们所认识,其一,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送。
因为,它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。
因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用。
尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。
在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
在生产过程中,经常要对流水线上的产品进行分捡,本课题拟开发物料搬运机械手,采用的德国西门子S7-200系列PLC,对机械手的上下、左右以及抓取运动进行控制。
用于分捡大小球的机械装置。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。
1 课程设计的任务和要求1.1 课程设计的任务1)大小球分拣系统设计2)分拣系统示意图和流程图如下图所示图1 大小球分拣系统示意图开始原位时,SQ3和SQ1被压下启动装置后,操作杆下行SQ2闭合?是大球N 是小球Y吸起球上行,压下SQ3后,右行压下SQ5后下行压下SQ2后,球放到球箱,返回原位吸盘的电磁阀线圈通电吸盘的电磁阀线圈通电吸起球上行,压下SQ3后,右行压下SQ4后下行压下SQ2后,球放到球箱,返回原位图2 大小球分拣系统流程图1.2 课程设计的基本要求1)完成分拣大小球系统的工作循环2)要求有四种工作方式:手动、回原点、单周期、连续 3)连续时,循环5次结束,声光间断报警5秒4)按停止按钮,完成当前循环后停2 总体设计2.1 PLC的选型因为在设计程序时总共用到了16个输入信号和7个输出信号,这样CPU的输入端子要多一些以满足要求,因此在大小球分选系统中用的PLC的选型为西门子S7-200系列的可编程控制器CPU 226 AC/DC/继电器。
PLC的主机:选择西门子S7-200系列作为此控制系统的主机。
选用CPU226的特点,其基本参数如下:本机数字输入:32路数字量输入本机数字输出:16路数字量输出内部存储器位:256位定时器总数:256定时器计数器总数:256计数器电源电压允许范围:AC85~264V输入电流仅CPU/最大负载:35/100 mA,AC 240V电压范围:DC20.4~28.8V电流限制:约1.5A2.2 I/O 端口图I0.1 I0.2I0.3I0.4I0.5I0.6 I0.7 I1.0I1.1I1.2I1.3 I1.4I1.5Q0.1Q0.0Q0.3Q0.4Q0.2Q0.5Q0.6左限位下限位上限位小球右限大球右限下降上升右行左行吸盘通电手动回原点连续停止启动下降吸/放球上升右行左行 声报警光报警手动吸盘断电I2.0I1.6 I1.7图3 I/O 端口图3 PLC 程序设计3.1 设计思想当输送机处于起始位置时,上限位开关和左限位开关开关闭合。
启动装置后,捡球装置下行,若碰到的是小球,则压力传感器为闭合状态;若碰到的是大球,则压力传感器为关闭状态。
吸起小球后,则捡球装置向上行,碰到上限位开关后,捡球装置向右行;碰到右限位开关(小球的右限位开关)后,再向下行,碰到下限位开关后,将小球释放到小球箱里,然后返回到原位。
如果吸起的是大球,捡球装置右行碰到另一个右限位开关(大球的右限位开关)后,再向下行,碰到下限位开关后,将大球释放到小球箱里,然后返回到原位。
3.2 顺序功能图M1.0M1.1Q0.2Q0.4I0.3+I0.4+I0.5I0.1MO.O 为后续步I1.7 I1.4.回原点启动左行Q0.4Q0.4上升吸盘断电图4 回原点程序的顺序功能图Q0.3Q0.2M2.2SQ0.1M2.1T37Q0.0M2.0M0.0SQ0.1Q0.4M2.5Q0.2RQ0.1M2.4Q0.0M2.3初始I1.7* M0.5原点启动下降2S吸小球上升右行下限位T37* I0.2 上限位I0.3小球右限I0.4下限位I0.2小球右限I0.4M3.5Q0.2RQ0.1M3.4Q0.0M3.3Q0.3Q0.2M3.2M3.1Q0.4下降放球上升左行T37* I0.2 未到下限位I0.3I0.5I0.2I0.5 上限位大球右限下限位大球右限吸大球 上升右行下降放球上升左行Q0.6Q0.5T38M2.7C0M2.6T38M0.5单周期I0.1M3.6M0.7M0.75次5s声报警光报警COCO(左限位)图5 自动程序的顺序功能图3.3 PLC梯形图图6 主程序梯形图图7 公用程序梯形图图8手动程序梯形图图9 回原点程序梯形图图10 自动程序梯形图4 程序调试说明仿真软件不能直接收到S7-200的程序代码,必须使用编程软件的导出功能将S7-200的用户程序转换为扩展名为“awl”的ASCⅡ文件,然后在下载到仿真PLC中去。
在仿真软件中执行菜单命令“文件”→“装载程序”,在出现的对话框中选择下载什么块,点击“确定”按钮后,在出现的“打开”对话框中双击要下载的*.awl文件,开始下载。
下载成功后,CPU模块上出现下载的ASCⅡ文件名称,同时会出现下载的程序代码文本框和梯形图(见下图)。
执行菜单命令“PLC”→“运行”,开始执行用户程序。
如果用户程序中有仿真软件不支持的指令或功能,执行菜单命令“PLC”→“运行”后,出现的对话框显示出仿真软件不能识别的指令。
点击“确定”按钮,不能切换到RUN模式,CPU模块右侧的“RUN”LED的状态不会变化。
可以用鼠标点击CPU模块下面的开关板上的小开关来模拟输入信号,通过模块上LED观察PLC输出点的状态变化,来检查程序执行的结果是否正确。
如调试本课设中的手动程序,先点击CPU模块的I1.3手动输入端开关,再点击上行按钮开关I0.7,这样就会观察到CPU模块上的Q0.2对应的LED灯亮,再点击上限位输入信号I0.3所对应的开关,就会观察到CPU模块上的Q0.2对应的LED灯熄灭,这说明手动程序的上行程序调试正确。
按上述方法一次调试所有程序,来检查程序执行的结果是否正确。
本程序经过仿真调试后,没发现任何错误,程序完全符合设计要求。
5 结束语就此课程设计就要告一段落,纵观整个设计过程,可以说在这一过程中我的收获很大,充分认识到自己的薄弱环节,通过理论分析与实践的反复进行和论证,许多问题都有了较好的解决方案。
通过此次设计,了解了PLC机械手在大小球分选系统的工作原理,首次学习了一些机械手的工作原理及使用方法。
其中电路及软件实现是此次设计的主要部分。
通过这次综合实践,我更加看清了自己的不足之处。
为了搞好这次毕业设计,通过查阅资料以及在老师和同学的帮助下,最终基本达到了设计目的。
通过实践,巩固了理论知识的学习,提高了实际应用所学知识的能力,还积累了许多宝贵的经验。
在这次的设计实践过程中,我认识到不管做什么事,尤其是科学实践,都需要大胆假设,小心求证。
任何一个方案都要经过详细周全的论证后才能着手去做,否则即使很快做出来,但经不起推敲和考验。
对于那些要求能够扩展功能的课题更是如此。
6 参考文献[1] 陈白宁主编.《机电传动控制基础》.第1版.东北大学出版社,2008年9月[2] 华玉洁.起重机械与吊装.第一版.化学工业出版社.2005.8;179-204[3]机械设计手册.机械设计手册编写组.第一版.机械工业出版社.1981;325-447[4]张燕宾.SPWM变频调速应用技术.第一版.机械工业出版社2002.5;[5]陈白宁,《机电传动控制》课程设计指导书.。