一种快速宽范围的自动曝光算法及其应用
FDTD软件介绍及案例分析一
由于不完美的滤色片,finite-sized入射光thescattering 折射、绕射内同时进行图像传感器像素,来料绿色的光照亮 的矽光电二极体上方的照亮象素,相邻像素。figurebelow向 下的显示能力在矽基板上的焊剂在像素所示。当接收的信号 是最亮的在过去的两个中间的绿sub-pixels残余信号观测, 照亮sub-pixels红色、蓝色、绿色sub-pixels附近。
一:公司背景介绍
1、公司介绍 • FDTD Solutions软件由加拿大Lumerical Solutions公司出品。
该公司成立于2003年,总部位于加拿大温哥华。用户用该 公司软件已发表大量高影响因子论文,并被许多国际著名 大公司和学术团队所使用 • FDTD Solutions:基于矢量3维麦克斯维方程求解,采用时 域有限差分FDTD法将空间网格化,时间上一步步计算,从 时间域信号中获得宽波段的稳态连续波结果,独有的材料 模型可以在宽波段内精确描述材料的色散特性,内嵌高速、 高性能计算引擎,能一次计算获得宽波段多波长结果,能 模拟任意3维形状,提供精确的色散材料模型
三:FDTD Solutions软件应用范围
1、应用范围:
8
四:FDTD Solutions软件应用实例库
1、FDTD Solutions应用实例库 • CMOS图像传感器像素设计 • 深紫外线(DUV)光刻仿真 • DVD表面分析 • LED光提取 • 纳米粒子散射 • 纳米线栅偏振器 • 光子晶体VCSEL • SPR纳米光刻 • 薄膜太阳能器件 • 波导微腔
DPS技术详解

宽动态摄像机技术发展与应用日本池上公司成立于1946年是全球最大的广播电视设备制造商之一,并于1961年开始生产CCTV摄像机。
凭借产品性能、色彩还原真实、图象质量和绝对的可靠性,池上摄像机充当着世界领导者的角色。
日本池上公司在2005年11月主要面向美国、欧洲等海外市场,推出基于Pixim DPS 技术动态范围高达120dB的监控摄像机“ISD-A10”。
尽管CMOS 传感器拍摄的图像在色彩浓度(色度电平)方面总归不如CCD摄像机,这也是使CMOS技术摄像机久久不能登大雅之堂的原因之一。
一、宽动态技术什么叫宽动态?简单地说宽动态就是场景中特别亮的部位和特别暗的部位同时都能看得特别清楚。
宽动态范围是图像能分辨最亮的亮度信号值与能分辨的最暗的亮光信号值的比值。
宽动态的表现方式以“倍数”或“dB”来表示,在以100IRE为标准时,换算公式:N dB=20log(V2/V1)。
普通摄像机(称V1)的宽动态值为10dB ,如宽动态为48 dB ,与普通摄像机之间的差为38 dB,V2/V1=80,说明与普通摄像机宽动态差为80倍,松下第三代宽动态摄像机是54 dB,V2/V1=160倍。
池上ISD-A10摄像机典型动态范围95 dB,V2/V1=17782倍,最大宽动态范围120dB,V2/V1=316227倍。
从“倍数”上看,采用Pixim DPS技术的摄像机,宽动态范围要比CCD宽动态范围有极大的提高。
对于DPS技术,每个像素对应的光线都可以优化曝光,每一帧数据读取时间只需0.8毫秒(传统CCD 技术则需数十毫秒),这样系统可以对每个像素进行多次单独采样;而成像系统控制着每个像素的最佳采样时间,在每个像素达到最佳状态时存储像素信息。
在所有像素被采集后,系统再对其进行处理,最终形成高质量的图像。
即使在最苛刻的光照条件下,也可捕捉到清晰、逼真的图像,再也不会因为阴影、眩光、反射和太阳光而使图像发暗或被破坏。
HDR原理与实现
HDR原理与实现HDR(High Dynamic Range)即高动态范围技术,是一种使用多个曝光水平的图像,通过合成来提高图像的动态范围的技术。
传统的摄影技术仅能呈现有限的动态范围,而HDR技术则能够更好地还原现实世界中宽广的亮度范围。
下面将详细介绍HDR技术的原理和实现方法。
1.HDR原理:传统的相机或摄影器材仅能同时记录一种曝光水平下的光照信息,因此当场景中包含明亮和暗部分时,摄影师必须在两者之间做出折中选择,导致亮部或暗部细节的丢失。
而HDR技术则通过在相机中采集多个不同曝光水平的图像,再通过合成算法将这些图像合并成一幅具有更广泛动态范围的图像。
具体原理如下:-曝光:使用自动或手动曝光控制,拍摄多张不同曝光水平的图像,通常包括亮度适中、亮度较低、和亮度较高的图像。
-对齐:将这些图像进行对齐对准,以保证后续的图像合成过程中各个图像对应区域的一致性。
-合成:通过合成算法,将亮度适中、亮度较低、亮度较低的图像进行加权叠加,得到高动态范围的图像。
-映射:对合成得到的高动态范围图像进行色调映射,以适应普通显示设备的有限动态范围,使图像能够在常规设备上显示。
2.HDR实现:实现HDR技术主要分为硬件实现和软件实现两种方式。
硬件实现:-多曝光传感器:一些相机设备中已经内置了多个传感器,可以同时捕捉多个曝光水平的图像。
-可变ND滤镜:通过在相机中使用可变中性密度(ND)滤镜,可调节进光量,以获取不同曝光水平的图像。
-曝光时间调节:通过控制相机的曝光时间,可以获取不同曝光水平的图像。
软件实现:- 图像融合:使用图像融合算法(如加权平均或基于像素值的选择)对不同曝光水平的图像进行合成,可使用Photoshop等软件进行处理。
- 色调映射:使用色调映射算法(如Reinhard,Durand等算法),将HDR图像映射到低动态范围显示设备上。
-色彩校正:通过色彩校正算法,对合成结果进行色彩修正,以达到更好的视觉效果。
相机成像中一种低噪点的宽动态范围算法
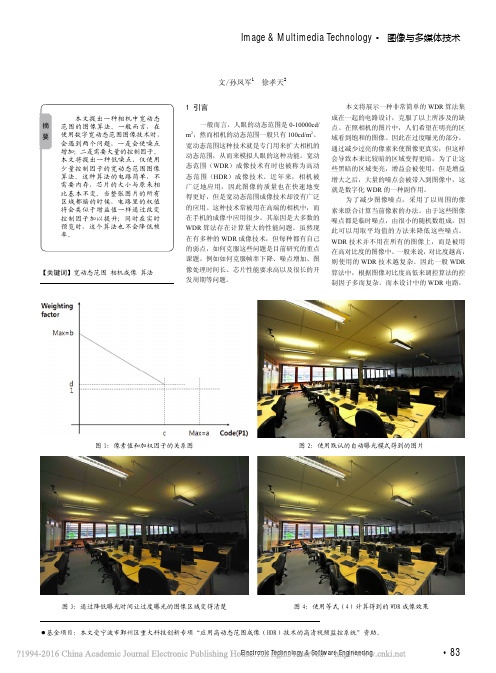
Image & Multimedia Technology ・图像与多媒体技术Electronic Technology & Software Engineering 电子技术与软件工程• 83【关键词】宽动态范围 相机成像 算法相机成像中一种低噪点的宽动态范围算法文/孙凤军1 徐孝天21 引言一般而言,人眼的动态范围是0-10000cd/m 2,然而相机的动态范围一般只有100cd/m 2。
宽动态范围这种技术就是专门用来扩大相机的动态范围,从而来模拟人眼的这种功能。
宽动态范围(WDR )成像技术有时也被称为高动态范围(HDR )成像技术。
近年来,相机被广泛地应用,因此图像的质量也在快速地变得更好,但是宽动态范围成像技术却没有广泛的应用。
这种技术常被用在高端的相机中,而在手机的成像中应用很少。
其原因是大多数的WDR 算法存在计算量大的性能问题。
虽然现在有多种的WDR 成像技术,但每种都有自己的弱点,如何克服这些问题是目前研究的重点课题。
例如如何克服帧率下降、噪点增加、图像处理时间长、芯片性能要求高以及很长的开发周期等问题。
本文将展示一种非常简单的WDR 算法集成在一起的电路设计,克服了以上所涉及的缺点。
在照相机的图片中,人们希望在明亮的区域看到饱和的图像。
因此在过度曝光的部分,通过减少过亮的像素来使图像更真实;但这样会导致本来比较暗的区域变得更暗。
为了让这些黑暗的区域变亮,增益会被使用。
但是增益增大之后,大量的噪点会被带入到图像中,这就是数字化WDR 的一种副作用。
为了减少图像噪点,采用了以周围的像素来联合计算当前像素的办法。
由于这些图像噪点都是临时噪点,由很小的随机数组成,因此可以用取平均值的方法来降低这些噪点。
WDR 技术并不用在所有的图像上,而是被用在高对比度的图像中。
一般来说,对比度越高,则使用的WDR 技术越复杂。
因此一般WDR 算法中,根据图像对比度高低来调控算法的控制因子多而复杂。
奥宝LDI激光成像曝光技术于HDI运用

JE limit
X
Max SFy X
X XX
-Max SFx
X
SFx
Max SFx
X
如果测得的涨缩值:
在限定范围内,曝光用中心平均涨缩值(固 定涨缩模式)
(涨缩组别“1”)
超过设定的涨缩范围,曝光可以用不超过JE 设定的最靠近平均值的涨缩值(集中涨缩)
(涨缩组别“2”)
-Max SFy
X
X
如果板子超过JE设定,曝光可用最适配的涨 缩值 (自动涨缩)
Confidential - 3
应用电子市场 – 应用在增加,尺寸在减小
• 更高的密度 • 更高的可靠性要求
Confidential -
HDI 来自市场的挑战
任意层互连 3-4阶增层板 叠盲孔设计 BGA pitch:0.4mm; 最终线宽/间距:40µm
Confidential -
LDI – 最先进的直接成像曝光解決方案
Garret Liu June 2012
Confidential -
Confidential
Orbotech LDI –市场领导者
全球装机量= 681
431 Paragon 125 Paragon-Xpress 47 Paragon-Ultra
76 DP-100SL 2 DP-100
Dimensions: 8.57m x 3.5m
Dimensions: 6.22m x 3.5m
Confidential -
LDI 连线系统可顺利实现6秒上下板,最大化产能
不同的入板方向选择
Confidential -
Orbotech LDI 技术特点简介 Paragon LDI 对位技术与涨缩 Paragon LDI自动化解决方案 Paragon 系列简介 Orbotech LDI 售后服务
ISP算法介绍

ISP算法介绍
这⼏天闲来⽆事就把过去⼀点时间做的东西,稍做整理以留纪念,也把⾃⼰所做的⼯作和⼤家分享⼀下。
ISP(Image Singal Process)⼴泛应⽤于安防监控,汽车电⼦等等⼀系列产品中。
ISP主要算法包括:3A---[AWB(⾃动⽩平衡),AE(⾃动曝光),AF(⾃动对焦)],CFA插值,暗⾓补偿,坏点检测,2D/3D去噪,锐化,VDE,Color Matrix,图⽚缩放,数字宽动态,伽马矫正等等⼀系列图像处理算法.
所有这些算法的最终⽬的都是使图像看上去更清晰,更好,使⼈们看上去有⼀个更好的感受。
那么学习ISP算法需要哪些知识呢?其实也就是⼀些最基本的图像处理⽅⾯的知识,如:图像⾊彩空间:RGB,YUV,LAB,XYZ,HSV空间等等。
在研究算法的时候,只要多动脑多查资料,相信都会有⼀个好的收获。
CCD摄像机的功能特征详解

CCD摄像机的功能特征详解CCD(Charge-Coupled Device)摄像机是一种使用CCD作为光电转换元件的摄像机,具有高质量的图像捕捉和视频录制功能。
下面将详细介绍CCD摄像机的功能特征。
1.高分辨率:CCD摄像机可以提供高分辨率的图像和视频,这是由于CCD具有大量的感光单位,可以捕捉到更多的细节。
高分辨率图像对于图像识别、图像分析和图像监控等应用非常重要。
2.高灵敏度:CCD摄像机的CCD感光元件可以接收较少的光信号,并转换为电信号。
因此,它具有较高的灵敏度,可以在较暗的环境下获得清晰的图像。
这使得CCD摄像机非常适用于夜间监控和低光环境下的摄影。
3.低噪声:CCD摄像机在图像获取过程中产生的噪声较少,可以提供清晰、细腻的图像。
这是因为CCD感光元件不受感光材料的颗粒性噪声影响,减少了图像质量的损失。
4.宽动态范围:CCD摄像机具有宽动态范围的特点,可以在亮度差异较大的场景中获取明亮和暗淡的细节,并进行自动曝光调节,避免图像曝光不足或过度曝光。
5. 色彩还原准确:CCD摄像机可以准确还原物体的颜色,使得图像的色彩更加真实自然。
这是由于CCD摄像机具有颜色滤光片(Bayer滤色片)和色彩信号处理电路等组件的存在。
6.快速的图像处理能力:CCD摄像机具有快速的图像采集和处理能力,可以实时地处理图像数据。
这使得CCD摄像机在需要快速反应的场景下非常有用,例如机器视觉、运动分析等应用。
7.大容量存储:CCD摄像机可以将图像和视频数据存储在内置的存储介质(如固态存储卡)或外部存储设备中。
由于CCD摄像机可以产生大量的图像和视频数据,大容量存储对于长时间记录或高分辨率录制至关重要。
8.强大的适应性:CCD摄像机具有广泛的适应性,可以应用于不同的领域和场景,如安防监控、工业检测、医学影像等。
它可以应对各种复杂的光照条件和环境要求,获取高质量的图像和视频。
总结起来,CCD摄像机具有高分辨率、高灵敏度、低噪声、宽动态范围、准确的色彩还原、快速的图像处理能力、大容量存储和强大的适应性等功能特征。
电子束曝光技术及其应用综述
1 引言在过去的几年中,微电子技术已发展到深亚微米阶段,并正在向纳米阶段推进。
在此期间,与微电子领域相关的微/纳加工技术得到了飞速发展,如图形曝光(光刻)技术、材料刻蚀技术、薄膜生成技术、离子注入技术和粘结互连技术等。
在这些加工技术中,图形曝光技术是微电子制造技术发展的主要推动者,正是由于曝光图形的分辨率和套刻精度的不断提高,促使集成电路集成度不断提高和制备成本持续降低[1]。
几十年来,在半导体器件和IC生产上一直占主导地位的光学曝光工艺为IC产业链的发展做出了巨大贡献。
通过一系列技术创新,采用超紫外准分子激光(193 /157nm)的光学曝光机甚至已将器件尺寸进一步推进到0.15~0.13μm,例如PAS5500/ 950B(ASML公司),NSR-203B(Nikon公司)和FPA-50 00ESI/ASI(Canon公司)。
但是,随着器件尺寸向0.1μm以下逼近,光学曝光技术将面临严峻的挑战,例如分辨率的提高使生产设备价格大幅攀升、超紫外光焦深缩短引起的材料吸收问题等,使光学曝光能否突破0.1μm成为业界普遍关注的问题[2~3]。
2 四种电子束曝光系统电子束曝光是利用电子束在涂有感光胶的晶片上直接描画或投影复印图形的技术,它的特点是分辨率高(极限分辨率可达到3~8μm)、图形产生与修改容易、制作周期短[4,5]。
它可分为扫描曝光和投影曝光两大类,其中扫描曝光系统是电子束在工件面上扫描直接产生图形,分辨率高,生产率低。
投影曝光系统实为电子束图形复印系统,它将掩模图形产生的电子像按原尺寸或缩小后复印到工件上,因此不仅保持了高分辨率,而且提高了生产率。
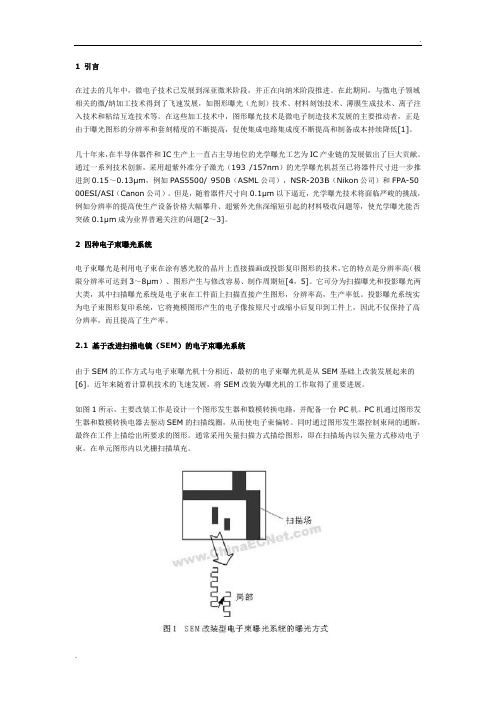
2.1 基于改进扫描电镜(SEM)的电子束曝光系统由于SEM的工作方式与电子束曝光机十分相近,最初的电子束曝光机是从SEM基础上改装发展起来的[6]。
近年来随着计算机技术的飞速发展,将SEM改装为曝光机的工作取得了重要进展。
如图1所示,主要改装工作是设计一个图形发生器和数模转换电路,并配备一台PC机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种快速宽范围的自动曝光算法及其应用王朋,张起贵,程永强太原理工大学信息工程学院,太原 (030024)E-mail:wp4139958@摘要:本文提出了一种新的快速自动曝光控制算法,该算法采用光圈控制和自动增益补偿相结合的控制方式实现宽范围自动曝光调节,采用模糊逻辑系统实现图像区域亮度的权值动态分配获得更加精确的图像亮度均值,同时利用PWM值与图形亮度值间的对应关系建立查找表以快速调整光圈至合适位置,最后辅以自动增益补偿控制,从而精确实现快速宽范围的自动曝光控制。
实验结果表明该算法对各种光线环境下均能进行精确快速的自动曝光控制。
关键词:自动曝光控制;模糊逻辑;摄像机中图分类号:TN911.731.引言曝光是用来描述从景物到达数码成像系统光通量大小的物理量。
曝光是否正常直接影响图像的效果。
曝光过度, 图像看起来就太亮; 曝光不足, 图像看起来就太暗。
因此。
自动曝光是数码成像系统中对图像信号的一项重要处理功能[1]。
传统的自动曝光系统将整幅图像的亮度均值与预先设定的参考值比较来进行曝光控制。
它的控制方法相对比较简单,控制功能也比较强大,目前仍占据市场主流位置。
其他的基本算法包括基于图像直方图、分辨率或对比度最大化的算法[2]以及人工神经网络的算法[3]。
这几类算法与传统的自动曝光控制方法比较都有各自的优点,但是实际应用起来复杂度较高,相应成本也较高,而且处理速度相对也比较慢。
本文提出了一种新的摄像机自动曝光控制方法。
2.算法基本原理在本文中提出的自动曝光控制算法其基本原理是根据模糊规则对图像的区域亮度均值进行动态加权并计算出当前图像的亮度均值,并结合当前给光圈直流电机发送的PWM脉冲值判定当前光强环境,然后通过查表得该光强环境下达到基准亮度所要发送的PWM脉冲,从而使光圈快速移动到合适位置。
考虑到建表的不精确性,本算法采用自动增益调节进行辅助调节,在光圈快速移动的同时,根据当前光强环境对自动增益的范围进行设定,从而实现摄像机的自动曝光的精确控制。
算法的核心是图像区域权值的动态分配和PWM与当前图像亮度值查找表的建立。
3.权值动态分配及当前亮度值的计算自动曝光不仅需要适用于各种不同的光线环境,而且需要适用于各种不同类型的图像。
因此本算法将整个图像分成区域0、区域1、区域2、区域3、区域4五个部分如图1所示。
不同类型的图像不同的光线条件所需要的曝光重点不一样,因此自动曝光算法给需要重点曝光的区域更高的权值[4-5]。
图1 图像的划分3.1 权值动态分配本算法根据图像区域权值动态分配的需要设计了一个模糊逻辑系统,考虑到单片机处理能力,又将这个大系统划分为两个子系统,每个子系统包括两个输入量,一条模糊规则及一个输出量。
本算法模糊子系统的划分由模糊规则来决定,根据专家经验及日常曝光的判定方法,得到如下两条逻辑规则[6]:1)、当区域0或区域1平均亮度较大,而区域2、区域3、区域4中其中一个平均亮度值偏小时,区域2、3、4将被赋予较大的权重。
2)、当5个区域的总平均亮度偏小,而其最亮区域的亮度偏大时,较暗的区域将被赋予较大权重。
规则1)构成子系统1,在拍摄过程中,最为常见的曝光异常是背光,这种情况通常会造成背景过于明亮而主体偏暗的曝光异常。
因此要适当增加亮度较低区域的权重。
规则2)构成子系统2,描述了人眼的感光特点,往往更注意暗部细节的损失。
当5个区域的总平均亮度偏小,画面的整体亮度也较低,但最亮区域的亮度偏大,则说明画面对比度较大,此时暗部细节显得更加重要,类似于背光的情况,应当增加亮度较低区域的权重。
模糊系统共有四个输入量:X1=V0;X2=min(V2,V3,V4);X3=(V0+V1+V2+V3+V4)/5;X4=max(V0,V1,V2,V3,V4);式中Vi为图中i区的平均亮度,X1与X2属于模糊规则1)所在的子系统1,X3与X4属于模糊规则2)所在的子系统2。
四个输入量X1、X2和X3、X4都是一区域的平均亮度值,它们具有相同的隶属函数。
将两个系统分别划出三个模糊集合,A1、A2和A3,其隶属函数如图2所示:图2输入量X1-X4的隶属函数根据各输入量所隶属的模糊集合以及模糊规则1)和2),为两个子系统各自定义了一组模糊逻辑规则。
由于两个子系统原理上相同,以子系统1为例:If X1 is A1 and X2 is A1, output1(s) is W(1,1).If X1 is A1 and X2 is A2, output1(s) is W(1,2).If X1 is A1 and X2 is A3, output1(s) is W(1,3).If X1 is A2 and X2 is A1, output1(s) is W(2,1).If X1 is A2 and X2 is A2, output1(s) is W(2,2).If X1 is A2 and X2 is A3, output1(s) is W(2,3).If X1 is A3 and X2 is A1, output1(s) is W(3,1).If X1 is A3 and X2 is A2, output1(s) is W(3,2).If X1 is A3 and X2 is A3, output1(s) is W(3,3).其中W均代表一组权值。
表1列出了对应于所有规则产生的权值,这些权值均由实验测定。
表1 子系统 的权值选取3.2 当前图像亮度值计算权值动态分配系统后,图像各区域得到一组权值W,根据公式(1)即可计算出当前图像亮度值:Aver = (V0*W0+V1*W1+ V2*W2+ V3*W3 + V4*W4) / (W0+W1+W2+W3+W4) (1)其中Aver即为所求的当前图像亮度值。
4.查找表的建立及使用4.1 查找表的建立在一定光照条件下,光圈开合的大小同图像亮度存在一定的关系,而PWM脉冲又是控制光圈开合的控制量(本算法的实现是使用基于音圈直流电机控制光圈的三可变镜头,其使用PWM脉冲来控制光圈的开合)。
因此,PWM值与图像亮度值之间必然存在着一定的对应关系。
我们通过大量试验选取一些具有代表性的光强环境,进而在这些光强环境下进行实验建立图像亮度值和PWM值的对应关系表。
图3即为PWM值与图像亮度值对应关系示意图,图中每条曲线均代表一定光强下光圈开合大小与当前亮度值的对应关系。
图3PWM值与亮度值对应关系示意图此外,在查找表建立过程中,我们根据试验状况对光圈开合的最大和最小口径进行限定,从而可以有效的保证了在光圈自动控制过程中图像的景深以及清晰度。
4.2 查找表的使用本算法根据计算所得当前图像亮度均值以及PWM值,依据模糊至最大值原则判定当前外界的光照环境,选择一条合适的光照曲线,进而根据基准亮度值查表得到目标PWM值(如图4所示)。
然后单片机根据目标PWM值发送合适的PWM脉冲使光圈快速移动到指定位置。
图4当前PWM值计算示意图5.算法应用实验主要从光照条件的正确判断、算法的速度和算法的精度三个方面对算法进行判断,采用了30种不同的光照环境测试,并着重关注了光强环境突变的时候自动曝光控制的速度与精度,结果表明本控制算法能够快速精确的控制光圈的开合,实现图像准确曝光。
本自动曝光控制算法已在两种不同的硬件平台上得以实现:(1)单片机+ FPGA(LPC 2132 + Xilinx X3S250E)平台;(2)单片机+专用DSP(LPC2132+SONY CXD4103/CXD3172)。
感光元件均采用SONY公司生产47万像素CCD图像传感器ICX229AK。
其中平台(2)利用了专用DSP内部的亮度计算单元配合单片机低成本实现,目前已被成功应用于一体化摄像机产品。
6.结论本文提出了一种新的用于摄像机的自动曝光控制算法,它采用了图像动态加权平均亮度值进行自动曝光控制,确定了加权亮度均值的计算原则,增加了背光区域和人眼感兴趣的区域的权值,使得图像亮度均值的计算更加精确;利用PWM值与当前图像亮度均值结合判定当前光照环境,通过查表的方式使光圈快速移动到指定位置,减少了曝光所需的时间。
同时采用光圈和自动增益补偿共同控制,使得本算法能够实现宽范围的精确自动曝光调节。
参考文献[1] Sampat Nitin, Venkataraman Shyam, Yeh Thomas, et al. System implications of implementing auto-exposure on consumer digital cameras [J]. SPIE, 1999, 3650:100-107.[2] CHEN Chao-yeh, TSENG Chen-yu, HUNG Chi-hsuan, et al. Combinational AE-AF system with fuzzy climbing search servo [J]. SPIE, 2006, 6069:107-114.[3] Nasser Kehtarnavaz, Hyuk-Joon Oh,Shidate I,et al. New approach to auto-white-balancing and auto-exposure for digital still cameras [J]. SPIE, 2002, 4669: 268-276.[4] S. Shimizu et al., A New Algorithm for Exposure Control Based on Fuzzy Logic for Video Cameras, IEEE Trans.Consumer Electronics, vol. 38, no. 3, pp. 617–623, Aug. 1992.[5] M. Murakami, and N. Honda, An Exposure Control System of Video Cameras Based on Fuzzy Logic Using Color Information,” Proceedings of the Fifth IEEE International Conference on, vol. 3, pp. 2181–2187, 1996. [6]周杰; 基于多区域分割及模糊逻辑的自动曝光方法 [D];上海交通大学; 2007年.A New Fast Auto-exposure Algorithm for Video Camerasand ApplicationWang Peng, Zhang Qigui, Cheng YongqiangInformation Engineering College, Taiyuan University of Technology, Taiyuan (030024)AbstractA new automatic exposure method with low-cost and fast response is proposed, it uses iris control and automatic gain compensation to realize automatic exposure control in a wide range. A more accurate average value of image luminance is obtained by a method of weight value dynamic allocation using fuzzy logic, and then diaphragm is adjusted to a proper position according to look up table based on the corresponding relation between the PWM value and image luminance value. To control the exposure more precisely, automatic gain compensation is used as a fine adjustment. Results show that the new automatic exposure algorithm gives efficient exposure control over various scene tests.Keywords: automatic exposure control; fuzzy logic; video cameras作者简介:王朋(1984-),男,硕士,主要从事一体化摄像机方面的研究;张起贵(1963-),男,硕士,副教授,主要研究领域为图像处理与图像通信。