基于FPGA的模糊PID控制器的设计
简述基于FPGA的温度模糊自适应PID控制器的设计
基于FPGA的温度模糊自适应PID控制器的设计2010-01-22 10:19:17 作者:郭敏秦刚刘洋来源:电子设计工程1 引言温度是工业生产过程中一个主要的被控参数。
目前,大多采用常规PID控制器实现对温度的控制。
PID控制器具有结构简单、易于实现且鲁棒性好、可靠性高等优点,对可建立精确数学模型的定常系统具有很好的控制效果,但由于实际温度控制系统工况复杂、参数多变、大惯性、大滞后,常规PID控制器难以对其高精度进行控制。
模糊控制鲁棒性强,无需被控对象的精确数学模型,只依赖于操作人员的经验知识及操作数据,非常适用于控制非线性、时变和滞后系统,但其静态性能较差,因此应用范围受很大限制。
针对这些问题,这里提出一种基于FPGA的温度模糊自适应PID控制器设计方案,该方案将传统PID控制与现代模糊控制相结合,应用模糊推理方法实现对PID参数的自动整定。
由此,经MATLAB 仿真验证该控制算法的可行性,将其应用于恒温箱的温度控制。
该控制器对恒温箱控制系统的控制效果明显优于常规PID控制器。
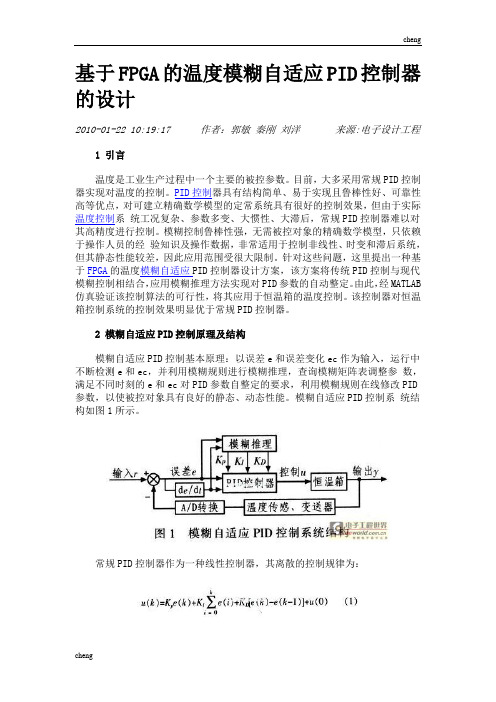
2 模糊自适应PID控制原理及结构模糊自适应PID控制基本原理:以误差e和误差变化ec作为输入,运行中不断检测e和ec,并利用模糊规则进行模糊推理,查询模糊矩阵表调整参数,满足不同时刻的e和ec对PID参数自整定的要求,利用模糊规则在线修改PID 参数,以使被控对象具有良好的静态、动态性能。
模糊自适应PID控制系统结构如图1所示。
常规PID控制器作为一种线性控制器,其离散的控制规律为:对于系统被控过程中不同的|e|和|ec|,PID参数Kp、KI、KD的自整定原则如下:(1)误差|e|较大时,为加快系统的响应速度,使系统具有快速跟踪性能,应取较大Kp和较小KD。
同时,为了防止积分饱和。
避免系统超调过大,应限制KI 或使其为零。
(2)误差|e|和|ec|中等时,为使系统超调较小,应取较小KP,适当KI和KD,特别是KD的取值对系统响应影响较大(一般取值较小)。
基于FPGA的PID控制器研究与实现共3篇

基于FPGA的PID控制器研究与实现共3篇基于FPGA的PID控制器研究与实现1近年来,随着现代控制理论的快速发展,PID控制器已经成为了广泛应用的经典算法之一。
PID控制器通过比较目标值和实际值之间的误差,反馈调整控制器的输出信号,实现对被控对象的精确控制。
PID控制器不仅简单且易于实现,而且良好的性能使其在自动控制领域中得到广泛应用。
而FPGA技术的高速并列运算、低延迟和高精度特性,为PID控制器的实时性和精度提供了重要的支持。
本文旨在通过基于FPGA技术的PID控制器研究与实现,探索这一领域的新思路和新方法。
一、PID控制器的基本原理PID控制器基于被控对象的输出值和标准值之间的误差进行控制。
该算法包括比例(P)、积分(I)和微分(D)三个参数。
其中,比例参数是通过直接调整被控量的大小,使其不断靠近标准值;积分参数修正了长期误差,通过积分误差实现偏差的修正;微分参数反映了被控物理系统的动力学特性,通过比率误差的变化率,实现对被控量的快速响应。
二、基于FPGA的PID控制器实现方案基于FPGA的PID控制器比传统的PC或单片机进行控制有更快的响应速度和更低的延迟。
基于FPGA的PID控制器将提供实时数据采集和高速算法处理的结合。
其实现方案基本步骤如下:1. 选择合适的FPGA芯片并进行开发环境搭建,比如选用Xilinx的Vivado软件进行开发。
2. 实现PID控制器的最重要的步骤是设计算法。
基于FPGA的PID控制器主要分为两个部分:控制循环和存储器组件。
控制循环模块主要将控制信号输出给被控对象,从而实现对被控对象的控制;存储器组件则使用存储器来保存被控量及反馈量等数据。
3. 在FPGA芯片上进行系统的相关硬件配置并进行PID算法的编程。
4. 根据实际需要,实现PID控制器与外部设备通信及数据传输,比如串口通讯、以太网通讯等。
三、实验结果与分析为了验证基于FPGA的PID控制器的实现效果和精度,我们进行了一系列实验。
基于FPGA的PID控制电路的设计与实现

1%
2% 5% 3% 1%
2%
图2
基于硬件描述语言的 PID 电路的 RTL 图
6
有符号数加减运算电路处理:由于在本设计中出 现了加减的运算,运用原码算法设计数字电路无疑增 加电路的复杂度。而采用补码运算进行设计就简单多 了,加减法运算都可以用相同的加法电路实现。在本 设计中, 对于负的运算值, 采用了 “求反且末位加 1” 的补码运算将其转换为正值,简化电路的结构。 小数运算的电路处理:在式(1) 中比例项的系数 KP 在(1、10)之间,而微分项的系数 KI 在(0、5) 之间。因为采样周期比较短,就会形成小数系数。 而硬件描述语言不能很好的进行浮点运算,解决的 办法是对整个运算式进行放大缩小处理。 例如把系数 n 增大 2 倍,获得整数运算后再进行缩小处理。
u(n) KP{e(n)
T TI
e(n) T [e(n) e(n 1)]} u (3)
i 1 0
n
TD
由(3)可看出,位置型控制算式不够方便,这是 因为要累加偏差 e(i ) ,不仅要占用较多的存储单元, 而且不便于编写程序。根据式(3),不难看 u(n-1)的 表达式,即
基于 FPGA 的 PID 控制电路的设计与实现
任文平,贾 赞,李鹏,陈志坚
云南大学信息学院,昆明 中国 650091 e-mail: rwp3053@
摘 要: 数字 PID 控制是普遍采用的自动控制方法,具有参数能够灵活整定的特点,本文以 FPGA 为平台,采用补码的加法器代替减法器设计,小数运算整数化等设计方法进行了 PID 电路的 设计与实现,以电动小车为控制对象的测试表明,与单片机控制电路相比,该电路不仅调节速度 较快,而且可靠性更高。 关键词: FPGA;PID;控制电路
基于FPGA的高速模糊控制器设计与实现

基于FPGA的高速模糊控制器设计与实现张超;支晓东;司兵见;唐旭光【摘要】In order to improve the response speed of the fuzzy controller,this paper presents the design of a high-speed fuzzy controller based on FPGA.The program uses five pipeline structure.The first stage calculate the difference between the expected value and the actual value.The second stage get accurate value of e and ec,then the third stage get it's fuzzy values E and EC.The fourth stage look up the value of the third stage from a look-up table and get the fuzzy output U.Finally,the fifth stage get the accurate output u.This program runs on Vertex-II FPGA frequencies up to 100 M,suitable for sensitive response speed control domin.This paper describes the design and simulation of the fuzzy controller with matlab.Then show circuit simulation to verify the correctness of its functions and finally achieve the desired results,having a high market value.%为了提高模糊控制器的响应速度,提出了一种基于FPGA的高速模糊控制器设计方案.该方案采用了5级流水线结构:第一级计算期望值与实际值的差值,第二级得到精确的差值e与ec,第三级对其模糊化得到模糊值E与EC,第四级对前一级输出查表得到模糊输出U,第五级解模糊得到精确输出u.该方案在Vertex-II FPGA上运行时钟频率达到100 M,适用于对响应速度敏感的控制领域.通过对该模糊控制器的matlab以及电路的仿真,验证了其功能的正确性,达到预期的设计效果,具有较高的应用价值.【期刊名称】《电子设计工程》【年(卷),期】2017(025)011【总页数】4页(P122-125)【关键词】模糊控制;simulink仿真;FPGA;流水线结构【作者】张超;支晓东;司兵见;唐旭光【作者单位】哈尔滨理工大学应用科学学院,黑龙江哈尔滨150080;哈尔滨理工大学应用科学学院,黑龙江哈尔滨150080;哈尔滨理工大学应用科学学院,黑龙江哈尔滨150080;哈尔滨理工大学应用科学学院,黑龙江哈尔滨150080【正文语种】中文【中图分类】TN79+1对于复杂度很高的控制系统来说,很难对其建立精确的数学模型,这给控制系统的设计带来巨大的挑战,模糊控制理论的提出为解决这类问题提供了新的思路[1]。
基于FPGA的模糊控制器的设计

现场可编程门阵列FPGA是近年来发展迅速的大规模可编程逻辑器件,它具有设计周期短,片内资源丰富,可无限次加载和现场可编程等特点。
在FPGA上实现模糊控制器是一种介于专用集成电路(ASIC )和通用处理器之间的方案,具有电子产品的高速度、高可靠性、小型化、集成化、低功耗、保密性能好、具有自主知识产权、产品上市快等优势。
模糊控制器不需要控制对象的精确数学模型,是一种基于规则的控制,依据操作人员的控制经验和专家的知识,通过查表得到控制量。
因此,模糊控制器具有响应快,超调量小,鲁棒性强等特点。
它能够克服系统中模型参数变化和非线性等不确定因素,在大滞后、非线性系统中得到广泛应用。
随着EDA技术的发展,FPGA在数字逻辑系统中发挥越来越重要的作用,采用硬件描述语言的硬件电路设计方法得到了广泛应用。
本文利用VHDL硬件描述语言在FPGA芯片上设计一种简化的模糊控制器。
一模糊控制器的结构及其FPGA实现流程图1 模糊控制器的组成框图图2 模糊控制器机构图由于一维模糊控制器的动态性能不能令人满意,三维及三维以上的模糊控制器结构复杂,建立模糊控制规则比较困难,因此一般采用双输入单输出的二维模糊控制器。
典型的两输人单输出模糊控制器的结构如图2所示,它由知识库、模糊化、模糊推理和逆模糊化4部分构成。
知识库向模糊化模块提供模糊量的隶属函数形态,使模糊化模块在接收到外部的精确量输人之后,能够将其转换成相对应时模糊量及隶属度。
同时,知识库向模糊推理模块提供控制规则,由模糊推理模块执行推理过程,由输人的模糊量推出输出的模糊量。
知识库也向反模糊化模块提供模糊量的隶属函数形态,反模糊化接口则将输出的模糊量及隶属度转换成与之对应的精确量。
论域和模糊状态应根据问题的实际情况而定,现在假设e,ec和u的模糊子集均为{NB,NM,NS,ZO,PS,PM,PB},模糊论域均为[-4,-3,-2,-1,0,1,2,3,4],设e的基本论域为[-2,2],ec的基本论域为[-1,1],u的基本论域为[-5,5]。
模糊PID控制器设计

模糊PID控制器设计PID控制器是一种常用的自动控制算法,广泛应用于各种工业过程中。
在实际应用过程中,由于系统的复杂性和非线性等原因,常常需要设计模糊PID控制器来提高系统的鲁棒性和控制性能。
1.确定系统的控制目标和性能指标:首先需要明确系统的控制目标,例如稳定性、响应速度、抗扰性等,然后确定对应的性能指标,例如超调量、调整时间、稳态误差等。
2.建立模糊控制规则库:根据系统的特性和控制目标,设计一套模糊控制规则库。
规则库一般包括模糊化、模糊规则以及解模糊化三个部分。
-模糊化:将输入目标和输入量经过模糊化,得到模糊量化值。
常见的模糊化方法有隶属函数法和三角函数法等。
- 模糊规则:根据经验规则和专家知识,设计一系列的模糊规则。
模糊规则一般采用if-then的形式,其中if部分是输入量模糊化后的模糊量化值,then部分是输出量的模糊量化值。
-解模糊化:将模糊量化值转化为具体的控制量。
常见的解模糊化方法有最大值法、加权平均法和中心平均法等。
3.设计模糊推理机制:模糊控制器的核心是模糊推理机制,通过模糊推理机制来根据输入的模糊量化值和模糊规则库来得到输出的模糊量化值。
常见的模糊推理机制有模糊与运算和模糊或运算等。
4.调整模糊PID控制器参数:根据系统的特性和性能指标,通过试验或者仿真的方法,对模糊PID控制器的参数进行优化调整。
一般可以采用遗传算法、粒子群算法等优化算法来进行参数调整。
5.实时控制和优化:将设计好的模糊PID控制器实时应用于控制系统中,并根据系统的反馈信号对控制器进行实时优化和参数调整,以达到更好的控制性能。
模糊PID控制器相比传统的PID控制器具有更好的鲁棒性和适应性,可以应对各种复杂、非线性的工业控制系统,提高控制精度和控制性能。
在实际应用中,需要根据具体的系统特性和性能需求来设计合适的模糊PID控制器,并经过实验和调整来优化控制效果。
同时,也需要考虑到计算复杂度和实时性等因素,确保控制系统的稳定性和可靠性。
基于模糊PID控制器的控制方法研究

基于模糊PID控制器的控制方法研究一、本文概述随着科技的进步和工业的快速发展,控制系统的精确性和稳定性成为了诸多领域,如自动化、机器人技术、航空航天等的关键需求。
PID (比例-积分-微分)控制器作为经典的控制策略,已被广泛应用于各种实际工程问题中。
然而,传统的PID控制器在面对复杂、非线性和不确定性的系统时,其性能往往会受到限制。
因此,寻求一种更加灵活、适应性强的控制方法成为了当前的研究热点。
本文旨在探讨和研究基于模糊PID控制器的控制方法。
模糊PID控制器结合了传统PID控制器的优点和模糊逻辑控制的灵活性,能够在不确定和非线性环境中实现更为精准和稳定的控制。
文章首先将对模糊PID控制器的基本原理进行介绍,包括其结构、特点和工作机制。
然后,通过对比实验和仿真分析,评估模糊PID控制器在不同场景下的控制效果,并探讨其在实际应用中的潜力和挑战。
文章还将讨论模糊PID控制器的参数优化方法,以提高其控制性能和鲁棒性。
本文的研究不仅有助于深入理解模糊PID控制器的控制机理,也为相关领域提供了一种新的控制策略选择,对于推动控制理论的发展和应用具有重要的理论价值和实践意义。
二、模糊PID控制器的基本原理模糊PID控制器是一种结合了模糊逻辑与传统PID控制算法的控制方法。
它旨在通过引入模糊逻辑的优点,改善传统PID控制在处理复杂、非线性系统时的不足。
模糊化过程:将PID控制器的三个主要参数——比例系数(Kp)、积分系数(Ki)和微分系数(Kd)进行模糊化。
这通常涉及到将连续的参数值映射到一组离散的模糊集合上,如“小”“中”和“大”。
模糊推理:在模糊化之后,模糊PID控制器使用模糊逻辑规则对输入误差(e)和误差变化率(ec)进行推理。
这些规则通常基于专家知识和经验,旨在确定如何调整Kp、Ki和Kd以优化系统性能。
解模糊化:经过模糊推理后,得到的输出是模糊的。
为了将这些输出应用于实际的控制系统,需要进行解模糊化过程,即将模糊输出转换为具体的、连续的控制信号。
基于DSP、FPGA和模糊自调整PID控制的仿人机器人控制系统的设计与实现

s o gaf a igcpbly ihrl bly t.T ersac okpasa c v o efr e ee p et f h h l t n n  ̄ mmn aait,hg i it,e r i i ea i c h eerhw r l nater ei t t rdvl m n o ew o y i l nh uh o t e
步发展起着积极作用 。 关键词 :仿人机器人 ;双 D P;反馈 回路 ;F G S P A; 自调整 PD I 中图分类号 :T 1 ;T 1 P3 P 8 文献 标识码 :A 文章编号 :10 3 8 2 1 )2 0 1— 8 1(0 1 1—11— 0 4
Dei n a d Re l a in o m a od Ro o n r lS se sg n ai t fHu n i b tCo to y tm z o
a tn mo s h ma o d r b t . u o o u u n i o o s
Kew rs u aodrbt u S ;Fe bc o ;F G y o d :H m n i o;D a D P ed akl p P A;S lajsn I o l o e -dut gPD f i
b c o e i n A slajsn I ot ls a g ae uz rlsW rpsd bsdo u igeg ot lter. akl pw r g e . e -d t g PD cnr t t ybsdfzy ue a pooe ae n ctn —decn o hoy o e v f ui o r e s t r
T r u h t e MAT AB smu ai n t e r s l h w c n rl s se C e e e d d i t h b t o y, i h s smp e sr cu e ho g h L i lt , h e ut s o o t y t m a b mb d e n o t e r o’ b d o s o n o S t a i l tu tr ,