模糊PID控制器的设计与仿真——设计步骤(修改)
变论域模糊PID控制器的设计与仿真

差变化率的基本论域为 [ - | ecm ax | , | ecm ax | ], 通过实 验可以确定其论域。表 2 给出了各个变量的语言变 量、 基本论域、 量化论域和模糊子集。
表 2 变量表 变量 语言变量 基本论域 量化论域 模糊子集
e E ec EC
ΔKP
KP
ΔKI
KI
ΔKD
KD
[ - 1, 1 ] [ - 3, 3 ]
[5]
输入指令信号为阶跃信号 , 采样周期取 0. 01 s, 仿真时间定为 1 000 s。一般模糊 P I D 控制器 如 图 4 所示 。模糊 P I D 控制器是模糊控制器与传统
PI D 控制器的结合 ,利用模糊推理判断的思想 , 根据
[7 ]
。变论域的特点是随着输入的变化 , 输出论域
表 1 双容水箱实验数据 序号 时间 / s 液位 / h% 序号 时间 / s 液位 / h% 序号 时间 / s 液位 / h%
1 0 2. 5 10 119 27. 3 19 310 54. 5 2 17 2. 5 11 128 30. 5 20 348 55. 3 3 29 2. 5 12 140 34. 2 21 385 55. 7 4 40 2. 9 13 148 36. 4 22 424 55. 9 5 46 3. 5 14 168 41. 5 23 442 56. 1 6 54 4. 9 15 187 44. 9 24 483 55. 9 7 66 7. 8 16 208 48. 0 25 511 56. 0 8 99 19. 2 17 230 50. 4 26 572 56. 1 9 106 22. 3 18 283 53. 7 27 600 56. 0
1 引 言
模糊PID控制器的设计及其仿真
李西风(1984一),男(汉族),陕西省西安市人,硕士研究生,主要研 究领域为航空宇航制造。 吕嘉凯(1983一),男(汉族)。吉林省舒兰市人,硕士研究生,主要研 究方向为图像压缩和图像去噪。
JI.=旦k。=旦
(1)
c
eC
2.3 FUzzy—PID控制器输入输出变量的确立
基于对系统的上述分析,模糊控制器以误差e和误差变
化ec作为输入,△kp、△五。、Aka分别为系统PID控制器的三个
控制参数一、k。、kd的修正值,系统实时控制参数I”k;、k。取 值(式(2),式中kp’、t’、k 7为预整定值l k
糊PID控制器中,经过模糊逻辑推理后,输出的是模糊判断, 它是多条模糊控制规则所得结论的综合。它是一个模糊量 而不能直接控制对象,还需要用合理的方法将模糊量转化为 精确量(解模糊化)U(t),去控制被控系统,以便最好地发挥 模糊推理结果的决策效果。解模糊化算法虽多,但在实际工
一132一 万方数据
图4常规PID控制器系统响应曲线图
砟=k’p+Akp
ki=虬+触j
(2)
kd=“+△J}d
将误差e,误差的变化率ec和三个参数Akp,肚;、△k转化成 模糊语言表示,以便系统进行模糊化数据处理(它们之间的
模糊关系见(表1—3)。设定输入输出语言变量模糊子集为 {负大,负中,负小,零,正小,正中,正大},并简记为{NB。
NM,NS,ZO,PS,PM,PBl,模糊子集的数量决定了对所研究 的变量论域的模糊分割的精细程度。模糊子集太少则模糊
系统图和常规PID控制系统图进行系统仿真实验。
仿真时,取皮革温度收缩测定仪温度控制系统的传递函
数为研究对象,见(式5)。对该仪器的温度控制系统分别采
自寻优自调整模糊PID控制器的设计与仿真
t er a —t o to p r r n e h sb e r v d sg i c n l .A p iain r s l h w t a h y t m h si e h e l i c n r l e f ma c a e n i o e in f a t me o mp i y p l t e u t s o h t e s s a — c o s t e d
摘 要 : 于优 化 控制 器 设 汁 , 对 常 规模 糊 控 制 器 , 关 针 由于 控 制 参数 和 控 制 规 则 的 固 定 , 成控 制 性 能 不 够 理 想 的 问题 , 出 了 造 提
一
种基于规则修 改的、 采用控制参数 自寻优和控制规则 臼调整 结合 的舣 重控 制策略 , 以提 商系统的控制性能 。通过 自寻
第2卷 第4 8 期
文 章 编 号 :0 6—94 (0 1 0 0 1 10 3 8 2 1 )4— 2 6—0 5
计
算
自适应模糊PID控制器的设计与仿真

自适应模糊PID控制器的设计与仿真自适应模糊PID控制器是一种结合了模糊控制和PID控制的自适应控制器,它能够在系统的不同工况下根据实际需求对PID参数进行自适应调整,从而使得系统具有更好的动态性能和稳定性。
本文将介绍自适应模糊PID控制器的设计思路和仿真过程。
1.设计思路1.1系统建模首先需要对待控制的系统进行建模,得到系统的数学模型。
这可以通过实验数据或者理论分析来完成。
一般情况下,系统的数学模型可以表示为:$G(s)=\frac{Y(s)}{U(s)}=\frac{K}{s(Ts+1)}$其中,K是系统的增益,T是系统的时间常数。
1.2设计模糊控制器接下来需要设计模糊控制器,包括模糊规则、模糊集和模糊运算等。
模糊控制器的输入是系统的误差和误差的变化率,输出是PID参数的调整量。
1.3设计PID控制器在模糊控制器的基础上,设计PID控制器。
PID控制器的输入是模糊控制器的输出,输出是控制信号。
1.4设计自适应机制引入自适应机制,根据系统的性能指标对PID参数进行自适应调整。
一般可以采用Lyapunov函数进行系统性能的分析和优化。
2.仿真过程在仿真中,可以使用常见的控制系统仿真软件,如MATLAB/Simulink 等。
具体的仿真过程如下:2.1设置仿真模型根据系统的数学模型,在仿真软件中设置仿真模型。
包括系统的输入、输出、误差计算、控制信号计算等。
2.2设置模糊控制器根据设计思路中的模糊控制器设计,设置模糊控制器的输入和输出,并设置模糊规则、模糊集和模糊运算等参数。
2.3设置PID控制器在模糊控制器的基础上,设置PID控制器的输入和输出,并设置PID参数的初始值。
2.4设置自适应机制设置自适应机制,根据系统的性能指标进行PID参数的自适应调整。
2.5运行仿真运行仿真,观察系统的响应特性和PID参数的变化情况。
根据仿真结果可以对设计进行调整和优化。
3.结果分析根据仿真结果,可以分析系统的稳定性、动态性能和鲁棒性等指标,并对设计进行调整和改进。
模糊pid matlab(simulink)仿真详细步骤
下面用一个简单的例子作介绍:(本例不是特别针对实现什么功能,只是为了介绍方便)第一部分创建一个模糊逻辑(.fis文件)第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为 probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、范围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值范围,本例中In_x和In_y的取值范围均为[0 10], Out_x和Out_y的取值范围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型) 将Number of MFs 设置为2点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name 中键入名称,在Type中选择形状,在Params中键入范围,然后回车如下图:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。
模糊PID控制器的设计与仿真——设计步骤(修改)
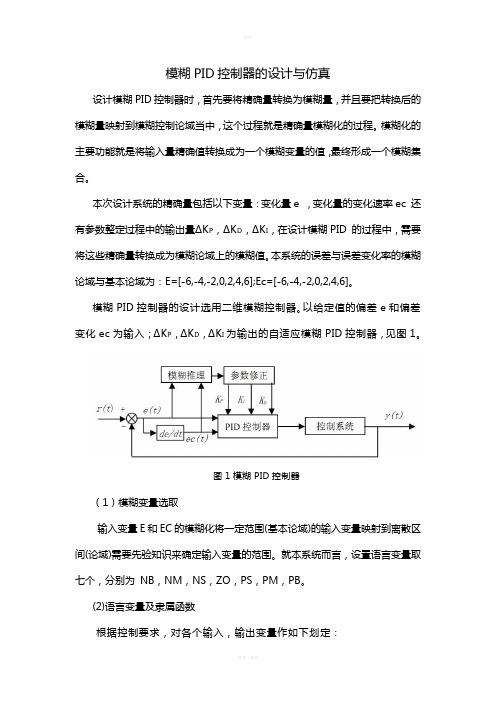
模糊PID控制器的设计与仿真设计模糊PID控制器时,首先要将精确量转换为模糊量,并且要把转换后的模糊量映射到模糊控制论域当中,这个过程就是精确量模糊化的过程。
模糊化的主要功能就是将输入量精确值转换成为一个模糊变量的值,最终形成一个模糊集合。
本次设计系统的精确量包括以下变量:变化量e ,变化量的变化速率ec 还有参数整定过程中的输出量ΔK P,ΔK D,ΔK I,在设计模糊PID 的过程中,需要将这些精确量转换成为模糊论域上的模糊值。
本系统的误差与误差变化率的模糊论域与基本论域为:E=[-6,-4,-2,0,2,4,6];Ec=[-6,-4,-2,0,2,4,6]。
模糊PID控制器的设计选用二维模糊控制器。
以给定值的偏差e和偏差变化ec为输入;ΔK P,ΔK D,ΔK I为输出的自适应模糊PID控制器,见图1。
图1模糊PID控制器(1)模糊变量选取输入变量E和EC的模糊化将一定范围(基本论域)的输入变量映射到离散区间(论域)需要先验知识来确定输入变量的范围。
就本系统而言,设置语言变量取七个,分别为NB,NM,NS,ZO,PS,PM,PB。
(2)语言变量及隶属函数根据控制要求,对各个输入,输出变量作如下划定:e ,ec 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}ΔK P ,ΔK D ,ΔK I 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}应用模糊合成推理PID 参数的整定算法。
第k 个采样时间的整定为).()(,)()(,)()(000k K K k K k K K k K k K K k K D D D I I I P P P ∆+=∆+=∆+=式中000,,D I P K K K 为经典PID 控制器的初始参数。
设置输入变量隶属度函数如图2所示,输出变量隶属度函数如图3所示。
图2 输入变量隶属度函图3 输出变量隶属度函(3)编辑模糊规则库根据以上各输出参数的模糊规则表,可以归纳出49条控制逻辑规则,具体的控制规则如下所示:1.If (e is NB) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)2.If (e is NB) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)3.If (e is NB) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)4.If (e is NB) and (ec is ZO) then (kp is NM)(ki is PM)(kd is PB)(1)5.If (e is NB) and (ec is PS) then (kp is NS)(ki is PS)(kd is PB)(1)6.If (e is NB) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PM)(1)7.If (e is NB) and (ec is PB) then (kp is ZO)(ki is ZO)(kd is NS)(1)8.If (e is NM) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)9.If (e is NM) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)11.I f (e is NM) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)12.I f (e is NM) and (ec is PS) then (kp is NS)(ki is PS)(kd is PM)(1)13.I f (e is NM) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PS)(1)14.I f (e is NM) and (ec is PB) then (kp is PS)(ki is ZO)(kd is ZO)(1)15.I f (e is NS) and (ec is NB) then (kp is NM)(ki is PB)(kd is ZO)(1)16.I f (e is NS) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)17.I f (e is NS) and (ec is NS) then (kp is NM)(ki is PS)(kd is PM)(1)18.I f (e is NS) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)19.I f (e is NS) and (ec is PS) then (kp is ZO)(ki is ZO)(kd is PS)(1)20.I f (e is NS) and (ec is PM) then (kp is PS)(ki is NS)(kd is PS)(1)21.I f (e is NS) and (ec is PB) then (kp is PS)(ki is NS)(kd is ZO)(1)22.I f (e is ZO) and (ec is NB) then (kp is NM)(ki is PM)(kd is ZO)(1)23.I f (e is ZO) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)24.I f (e is ZO) and (ec is NS) then (kp is NS)(ki is PS)(kd is PS)(1)25.I f (e is ZO) and (ec is ZO) then (kp is ZO)(ki is ZO)(kd is PS)(1)26.I f (e is ZO) and (ec is PS) then (kp is PS)(ki is NS)(kd is PS)(1)27.I f (e is ZO) and (ec is PM) then (kp is PM)(ki is NM)(kd is PS)(1)28.I f (e is ZO) and (ec is PB) then (kp is PM)(ki is NM)(kd is ZO)(1)29.I f (e is PS) and (ec is NB) then (kp is NS)(ki is PM)(kd is ZO)(1)30.I f (e is PS) and (ec is NM) then (kp is NS)(ki is PS)(kd is ZO)(1)31.I f (e is PS) and (ec is NS) then (kp is ZO)(ki is ZO)(kd is ZO)(1)32.I f (e is PS) and (ec is ZO) then (kp is PS)(ki is NS)(kd is ZO)(1)33.I f (e is PS) and (ec is PS) then (kp is PS)(ki is NS)(kd is ZO)(1)34.I f (e is PS) and (ec is PM) then (kp is PM)(ki is NM)(kd is ZO)(1)36.I f (e is PM) and (ec is NB) then (kp is NS)(ki is ZO)(kd is NB)(1)37.I f (e is PM) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is PS)(1)38.I f (e is PM) and (ec is NS) then (kp is PS)(ki is NS)(kd is NS)(1)39.I f (e is PM) and (ec is ZO) then (kp is PM)(ki is NS)(kd is NS)(1)40.I f (e is PM) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)41.I f (e is PM) and (ec is PM) then (kp is PM)(ki is NB)(kd is NS)(1)42.I f (e is PM) and (ec is PB) then (kp is PB)(ki is NB)(kd is NB)(1)43.I f (e is PB) and (ec is NB) then (kp is ZO)(ki is ZO)(kd is NB)(1)44.I f (e is PB) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is NM)(1)45.I f (e is PB) and (ec is NS) then (kp is PM)(ki is NS)(kd is NM)(1)46.I f (e is PB) and (ec is ZO) then (kp is PM)(ki is NM)(kd is NM)(1)47.I f (e is PB) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)48.I f (e is PB) and (ec is PM) then (kp is PB)(ki is NB)(kd is NS)(1)49.I f (e is PB) and (ec is PB) then (kp is PB)(ki is NB)(kd is NB)(1) 把这49条控制逻辑规则,键入到模糊规则库中,如图4。
模糊PID控制原理与设计步骤
模糊PID控制原理与设计步骤1.模糊化输入:将输入量通过模糊化过程,将其转化为隶属度函数形式,用来描述输入数量的各个级别或水平。
2.模糊化输出:同样地,将输出量也通过模糊化过程,转化为隶属度函数形式。
3.模糊化规则库:根据经验和专家知识,建立一组模糊规则,用来描述输入与输出之间的关系。
4.基于规则库的推理:根据输入的隶属度函数和规则库,通过隶属度的逻辑运算进行推理,得到输出的隶属度函数。
5.解模糊化:将输出的隶属度函数转化为具体的输出量,可以采用常用的解模糊化方法,如最大隶属度法、面积法等。
1.系统建模:首先需要对被控对象进行建模,得到其输入-输出关系。
可以基于部分局部建模或物理建模进行分析和确定。
2.设计模糊控制器的输入和输出:根据系统的特性和要求,确定模糊控制器的输入和输出。
- 输入通常包括误差(error)和误差的变化率(change in error)等。
-输出通常为控制量,可为模糊量或一阶量。
3.确定输入和输出的隶属度函数:确定输入和输出的隶属度函数形式,并根据实际情况进行参数调整。
通常可以选择三角形、梯形或高斯型函数等。
4. 设计模糊规则库:根据经验和专家知识,建立模糊规则库。
规则库的设计需要包括合理的覆盖边界和均匀的分布。
可以使用专家系统、模糊C-Means聚类等方法进行规则库的构建。
5.制定模糊推理机制:确定模糊推理的方法,常用的有最小最大法、剪切平均法等。
根据输入的隶属度函数和规则库,进行隶属度的逻辑运算和推理,得到输出的隶属度函数。
6.解模糊化:根据规则库,将模糊输出转化为具体的控制量。
可以采用最大隶属度法、面积法等方法进行解模糊化。
7.验证和调整:将设计好的模糊PID控制器应用到实际系统中,进行运行和调整。
根据实际反馈信号,对模糊规则库进行优化和调整,以提高控制系统的性能和稳定性。
总结:模糊PID控制是一种基于模糊逻辑和PID控制相结合的控制方法,能够更好地应对非线性、时变和模糊的控制系统。
单片机模糊PID自整定控制算法的实现及仿真
单片机模糊PID自整定控制算法的实现及仿真一、引言PID控制(Proportional-Integral-Derivative Control)是一种常用的控制算法,用于调节系统的输出并使其接近设定值。
然而,传统的PID控制算法需要对调节参数进行手动调整,这在工程实际中往往十分困难。
为了解决这一问题,模糊PID自整定控制算法被提出。
模糊PID自整定控制算法可以根据系统的动态特性自动调整PID参数,提高系统的稳定性和鲁棒性。
本文将介绍单片机上模糊PID自整定控制算法的实现及仿真。
二、模糊PID自整定控制算法原理模糊PID自整定控制算法基于模糊逻辑理论,根据系统的输入和输出特征来自动调整PID的参数。
该算法过程主要包括模糊化、规则库的建立、推理、去模糊化等几个步骤。
以下是模糊PID自整定控制算法的具体步骤:1.模糊化:将输入和输出分别映射到隶属函数上,将连续的输入和输出转换为模糊的隶属度。
2.规则库的建立:利用专家经验建立一组模糊规则,规则库中包括输入的隶属函数和输出的隶属函数之间的关系。
3.推理:根据输入的隶属度和规则库的模糊规则,利用模糊推理得到输出的隶属度。
4.去模糊化:将模糊输出转换为确定性的输出,得到PID的参数。
三、单片机上模糊PID自整定控制算法的实现单片机上实现模糊PID自整定控制算法需要以下几个部分:传感器采集模块、模糊控制模块、PWM输出模块和显示模块。
1.传感器采集模块:使用传感器采集被控对象的输入和输出数据,如温度传感器、光敏传感器等。
2.模糊控制模块:将传感器采集的数据模糊化并输入到模糊控制器中,进行模糊推理,得到输出的隶属度。
3.PWM输出模块:根据输出的隶属度,计算PID的参数,然后将参数转换为PWM信号输出到被控对象。
4.显示模块:将被控对象的输入和输出数据、PID参数等信息通过显示模块显示出来,便于调试和监控。
四、单片机上模糊PID自整定控制算法的仿真为了验证模糊PID自整定控制算法的有效性,可以利用仿真软件进行仿真实验。
模糊pidmatlab(simulink)仿真详细步骤
下面用一个简单的例子作介绍:(本例不是特别针对实现什么功能,只是为了介绍方便)第一部分创建一个模糊逻辑(.fis文件)第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、范围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值范围,本例中In_x和In_y的取值范围均为[0 10], Out_x和Out_y的取值范围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型) 将Number of MFs设置为2点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name中键入名称,在Type 中选择形状,在Params中键入范围,然后回车如下图:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。
模糊PID 控制器设计及仿真
模糊PID 控制器设计及仿真张三自动化学院10级1班学号摘要: 提出了高动态性能切换模糊PID 控制器设计方法。
通过对传统PID 控制中比例控制和微分控制作用的分析, 结合模糊PID 控制器鲁棒性能和自适应性好的优点, 设计了一类新的模糊控制器。
由于该类控制器先后经历比例控制, 微分控制和模糊PID 控制的切换, 使被控系统不仅具有一般模糊PID 控制器的所具有的良好的鲁棒性能和自适应性, 而且与一般模糊控制器相比具有更小的超调量和调节时间。
关键词: 模糊PID 控制器, 仿真1引言论算法是基于对过去、现在、未来的信息进行综合和估计的一种简单的控制算法, 是一种基于偏差的控制方式。
PID控制器以其算法简单,计算量小,使用方便,鲁棒性较强等优点而得到广泛应用,并取得了良好的控制效果。
但是对于一些时变和非线性的系统常规PID就显得无能为力了。
常规PID控制参数的最佳调整还未实现自动化,依靠人工凑试的整定方法不仅需要丰富的经验和技巧,而且十分费时。
同时,在实际控制系统控制过程中,由于噪声、负载扰动和其他一些环境条件变化的影响,受控过程参数,模型结构均将发生变化。
在这种情况下,采用常规PID 控制器难以获得满意的控制效果,而模糊控制不依赖被控对象精确的数学模型,是在总结操作经验基础上实现自动控制的一种手段。
本文应用模糊推理的方法实现对PID参数的在线自动整定,并依此设计出一般控制系统的模糊参数自整定PID控制器。
基于MATLAB的仿真结果表明与常规PID控制系统相比,该设计能获得更优的鲁棒性和动、静态性及具有良好的自适应性。
2PID控制器的设计及仿真2.1经典PID控制器本经典PID 控制器的传递函数可描述为:G( s) =Kp+KDs+KI /s控制器输入为e( t) =yr ( t) - y( t), 其中yr 为系统参考输入, y为系统输出, 控制器输出为控制量u。
由于比例控制的作用是使动态相应加快, Kp 越大速度越快, 但过大会使系统出现超调甚至使系统不稳定; 微分控制主要是抑制超调; 模糊控制使系统有更好的鲁棒性和自适应性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模糊PID控制器的设计与仿真设计模糊PID控制器时,首先要将精确量转换为模糊量,并且要把转换后的模糊量映射到模糊控制论域当中,这个过程就是精确量模糊化的过程。
模糊化的主要功能就是将输入量精确值转换成为一个模糊变量的值,最终形成一个模糊集合。
本次设计系统的精确量包括以下变量:变化量e ,变化量的变化速率ec 还有参数整定过程中的输出量ΔKP ,ΔKD,ΔKI,在设计模糊PID 的过程中,需要将这些精确量转换成为模糊论域上的模糊值。
本系统的误差与误差变化率的模糊论域与基本论域为:E=[-6,-4,-2,0,2,4,6];Ec=[-6,-4,-2,0,2,4,6]。
模糊PID控制器的设计选用二维模糊控制器。
以给定值的偏差e和偏差变化ec为输入;ΔKP ,ΔKD,ΔKI为输出的自适应模糊PID控制器,见图1。
图1模糊PID控制器(1)模糊变量选取输入变量E和EC的模糊化将一定范围(基本论域)的输入变量映射到离散区间(论域)需要先验知识来确定输入变量的范围。
就本系统而言,设置语言变量取七个,分别为 NB,NM,NS,ZO,PS,PM,PB。
(2)语言变量及隶属函数根据控制要求,对各个输入,输出变量作如下划定:e,ec论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}ΔKP ,ΔKD,ΔKI论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}应用模糊合成推理PID参数的整定算法。
第k个采样时间的整定为).()(,)()(,)()(kKKkKkKKkKkKKkKDDDIIIPPP∆+=∆+=∆+=式中,,DIPKKK为经典PID控制器的初始参数。
设置输入变量隶属度函数如图2所示,输出变量隶属度函数如图3所示。
图2 输入变量隶属度函图3 输出变量隶属度函(3)编辑模糊规则库根据以上各输出参数的模糊规则表,可以归纳出49条控制逻辑规则,具体的控制规则如下所示:1.If (e is NB) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)2.If (e is NB) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)3.If (e is NB) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)4.If (e is NB) and (ec is ZO) then (kp is NM)(ki is PM)(kd is PB)(1)5.If (e is NB) and (ec is PS) then (kp is NS)(ki is PS)(kd is PB)(1)6.If (e is NB) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PM)(1)7.If (e is NB) and (ec is PB) then (kp is ZO)(ki is ZO)(kd is NS)(1)8.If (e is NM) and (ec is NB) then (kp is NB)(ki is PB)(kd is NS)(1)9.If (e is NM) and (ec is NM) then (kp is NB)(ki is PB)(kd is PS)(1)10.If (e is NM) and (ec is NS) then (kp is NM)(ki is PM)(kd is PB)(1)11.If (e is NM) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)12.If (e is NM) and (ec is PS) then (kp is NS)(ki is PS)(kd is PM)(1)13.If (e is NM) and (ec is PM) then (kp is ZO)(ki is ZO)(kd is PS)(1)14.If (e is NM) and (ec is PB) then (kp is PS)(ki is ZO)(kd is ZO)(1)15.If (e is NS) and (ec is NB) then (kp is NM)(ki is PB)(kd is ZO)(1)16.If (e is NS) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)17.If (e is NS) and (ec is NS) then (kp is NM)(ki is PS)(kd is PM)(1)18.If (e is NS) and (ec is ZO) then (kp is NS)(ki is PS)(kd is PM)(1)19.If (e is NS) and (ec is PS) then (kp is ZO)(ki is ZO)(kd is PS)(1)20.If (e is NS) and (ec is PM) then (kp is PS)(ki is NS)(kd is PS)(1)21.If (e is NS) and (ec is PB) then (kp is PS)(ki is NS)(kd is ZO)(1)22.If (e is ZO) and (ec is NB) then (kp is NM)(ki is PM)(kd is ZO)(1)23.If (e is ZO) and (ec is NM) then (kp is NM)(ki is PM)(kd is PS)(1)24.If (e is ZO) and (ec is NS) then (kp is NS)(ki is PS)(kd is PS)(1)25.If (e is ZO) and (ec is ZO) then (kp is ZO)(ki is ZO)(kd is PS)(1)26.If (e is ZO) and (ec is PS) then (kp is PS)(ki is NS)(kd is PS)(1)27.If (e is ZO) and (ec is PM) then (kp is PM)(ki is NM)(kd is PS)(1)28.If (e is ZO) and (ec is PB) then (kp is PM)(ki is NM)(kd is ZO)(1)29.If (e is PS) and (ec is NB) then (kp is NS)(ki is PM)(kd is ZO)(1)30.If (e is PS) and (ec is NM) then (kp is NS)(ki is PS)(kd is ZO)(1)31.If (e is PS) and (ec is NS) then (kp is ZO)(ki is ZO)(kd is ZO)(1)32.If (e is PS) and (ec is ZO) then (kp is PS)(ki is NS)(kd is ZO)(1)33.If (e is PS) and (ec is PS) then (kp is PS)(ki is NS)(kd is ZO)(1)34.If (e is PS) and (ec is PM) then (kp is PM)(ki is NM)(kd is ZO)(1)35.If (e is PS) and (ec is PB) then (kp is PM)(ki is NB)(kd is ZO)(1)36.If (e is PM) and (ec is NB) then (kp is NS)(ki is ZO)(kd is NB)(1)37.If (e is PM) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is PS)(1)38.If (e is PM) and (ec is NS) then (kp is PS)(ki is NS)(kd is NS)(1)39.If (e is PM) and (ec is ZO) then (kp is PM)(ki is NS)(kd is NS)(1)40.If (e is PM) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)41.If (e is PM) and (ec is PM) then (kp is PM)(ki is NB)(kd is NS)(1)42.If (e is PM) and (ec is PB) then (kp is PB)(ki is NB)(kd is NB)(1)43.If (e is PB) and (ec is NB) then (kp is ZO)(ki is ZO)(kd is NB)(1)44.If (e is PB) and (ec is NM) then (kp is ZO)(ki is ZO)(kd is NM)(1)45.If (e is PB) and (ec is NS) then (kp is PM)(ki is NS)(kd is NM)(1)46.If (e is PB) and (ec is ZO) then (kp is PM)(ki is NM)(kd is NM)(1)47.If (e is PB) and (ec is PS) then (kp is PM)(ki is NM)(kd is NS)(1)48.If (e is PB) and (ec is PM) then (kp is PB)(ki is NB)(kd is NS)(1)49.If (e is PB) and (ec is PB) then (kp is PB)(ki is NB)(kd is NB)(1) 把这49条控制逻辑规则,键入到模糊规则库中,如图4。
图4 模糊规则库(5)模糊PID 控制器仿真利用MATLAB 软件中的Simulink 仿真环境,可以对模糊PID 控制器系统进行模拟仿真实验,来检验设计是否达到要求。
针对本次控制器设计,我们设置被控对象为))()()((432110++++s s s s ,根据被控对象,设置相应的PID 参数为:P K =6;I K =3;D K =2。
图5为控制器系统在Simulink 中的仿真模型。
为了方便与传统PID 控制器进行比较,在Simulink 仿真环境中作出传统PID 控制以便于对模糊PID 进行比较。