实例:模糊PID控制系统
PID控制原理和实例
PID控制原理和特点143401010529 二班李卓奇工程实际中,应用最为广泛调节器控制规律为比例、积分、微分控制,简称PID 控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制主要技术之一。
当被控对象结构和参数不能完全掌握,或不到精确数学模型时,控制理论其它技术难以采用时,系统控制器结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象﹐或不能有效测量手段来获系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
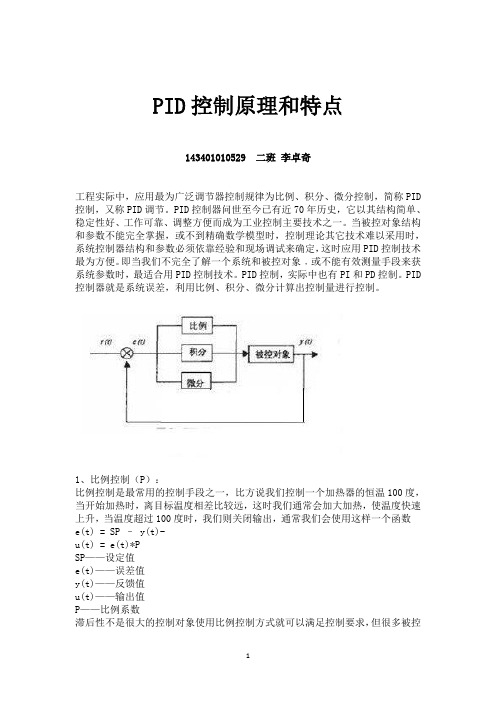
PID 控制器就是系统误差,利用比例、积分、微分计算出控制量进行控制。
1、比例控制(P):比例控制是最常用的控制手段之一,比方说我们控制一个加热器的恒温100度,当开始加热时,离目标温度相差比较远,这时我们通常会加大加热,使温度快速上升,当温度超过100度时,我们则关闭输出,通常我们会使用这样一个函数e(t) = SP – y(t)-u(t) = e(t)*PSP——设定值e(t)——误差值y(t)——反馈值u(t)——输出值P——比例系数滞后性不是很大的控制对象使用比例控制方式就可以满足控制要求,但很多被控对象中因为有滞后性。
也就是如果设定温度是200度,当采用比例方式控制时,如果P选择比较大,则会出现当温度达到200度输出为0后,温度仍然会止不住的向上爬升,比方说升至230度,当温度超过200度太多后又开始回落,尽管这时输出开始出力加热,但温度仍然会向下跌落一定的温度才会止跌回升,比方说降至170度,最后整个系统会稳定在一定的范围内进行振荡。
如果这个振荡的幅度是允许的比方说家用电器的控制,那则可以选用比例控制2、比例积分控制(PI):积分的存在是针对比例控制要不就是有差值要不就是振荡的这种特点提出的改进,它常与比例一块进行控制,也就是PI控制。
智能控制作业_模糊自适应PID控制
模糊自适应PID 控制的Matlab 仿真设计研究姓名:陈明学号:201208070103班级:智能1201一、 模糊控制思想、PID 控制理论简介:在工业生产过程中,许多被控对象受负荷变化或干扰因素很多基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制器的控制特点及参数设计规则, 实现PID 控制器的在线自整定和自调整。
通过matlab 软件进行实例,仿真表明, , 提高控制系统实时性和抗干扰能力,易于实现.便于工程应用。
1.1 模糊控制的思想:应用模糊数学的基本理论和方法, 控制规则的条件、操作用模糊集来表示、并把这些模糊控制规则以及有关信息, 诸如PID 控制参数等作为知识存入计算机知识库, 然后计算机根据控制系统的实际情况(系统的输入, 输出) , 运用模糊推理。
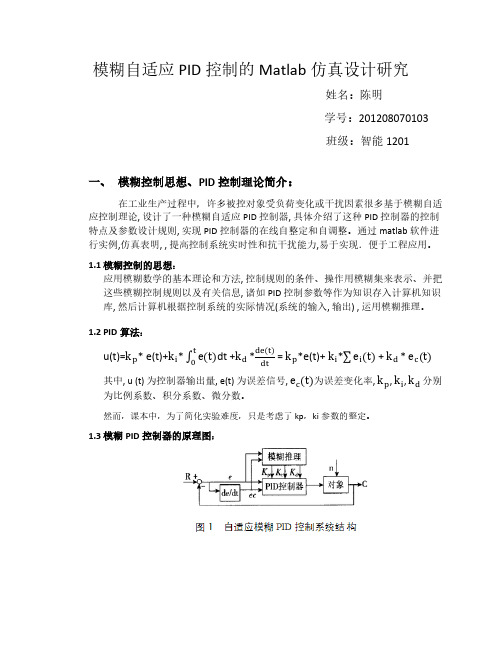
1.2 PID 算法:u(t)=k p * e(t)+k i * ∫e(t)t 0dt +k d *de(t)dt= k p *e(t)+ k i *∑e i (t) + k d * e c (t)其中, u (t) 为控制器输出量, e(t) 为误差信号, e c (t)为误差变化率, k p , k i , k d 分别为比例系数、积分系数、微分数。
然而,课本中,为了简化实验难度,只是考虑了kp ,ki 参数的整定。
1.3 模糊PID 控制器的原理图:二、基于Matlab的模糊控制逻辑模块的设计关于模糊逻辑的设计,主要有隶属函数的编辑,参数的选型,模糊规则导入,生成三维图等观察。
2.1 模糊函数的编辑器的设定:打开matlab后,在命令窗口输入“fuzzy”,回车即可出现模糊函数编辑器,基本设置等。
基于课本的实验要求,我选的是二输入(e, e c)二输出(k p ,k i)。
需要注意的是,在命名输入输出函数的时候,下标字母需要借助下划线的编辑,即e_c 能够显示为e c。
2.2四个隶属函数的N, Z, P 函数设定:在隶属函数的设定中,N 选用的是基于trimf(三角形隶属函数) , Z是基于zmf(Z型隶属函数),P是基于smf(S型隶属函数)。
基于CAN总线的模糊PID张力控制系统

2 模糊 PD 制器 的原理及 实现 I控
21 模糊 PI控 制 器的原 理 . D
模糊P D控制 是在 传统P D控制 的基 础上对 PD I I I 参 数 ( K 。 K。 K )在 线 整 定 。通 过 输 入量 的模 糊 化 、模 糊规 则运 算 、反 模 糊化 来实 现 对PD参 数 的 I
好 的 人 机 界 面 实现 对 整个 织 机 运 动 过 程 的 参数 设
收稿 日期:2 1- 7 0 0 1 0- 5 作者简介:张守辉 (9 4一),男,硕士研究生 ,研究方 向为智能信息处理 。 18
第3 卷 4
第2 期
2 1- 2 上 ) [1 02 0 ( 21
1
匐 化
参l 匐 似
基于C N总线的模糊PD张力控制 系统 A I
Tensi on con r ys em f f z PI bas t ols t o uz y- D ed on CA N bUS
张守辉,于会山,姬小夸,刘新建
Z A h u h i u.h n J Xiok a LU X nj n H NG S o — u, YU H i a , I a - u , I i-a s i
制器 的 单极 性 数 字量 最 大值 为 3 0 0 2 0 ,则 经 过A/ D 转 化 后得 到 的数 字量 为 1 0 0 6 0 。假设 该 送 经张 力 的 精 度要 求 为2 KG, 0 则对 应 的数 字 量 的实 际范 围 为 [ 6 , 0 。 ̄ K = /6 = .17 。模糊 规则 的确 定 一 01 ] l e 31 0 0 8 5 1 6 J 0 是根 据操 作者 得实 践经验得 到 的 ,有时 也称 之为 专 家控制 。模糊PD控制 规则如 图5 示 。 I 所
PID控制原理和实例
PID控制原理和特点143401010529 二班李卓奇工程实际中,应用最为广泛调节器控制规律为比例、积分、微分控制,简称PID 控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制主要技术之一。
当被控对象结构和参数不能完全掌握,或不到精确数学模型时,控制理论其它技术难以采用时,系统控制器结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象﹐或不能有效测量手段来获系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID 控制器就是系统误差,利用比例、积分、微分计算出控制量进行控制。
1、比例控制(P):比例控制是最常用的控制手段之一,比方说我们控制一个加热器的恒温100度,当开始加热时,离目标温度相差比较远,这时我们通常会加大加热,使温度快速上升,当温度超过100度时,我们则关闭输出,通常我们会使用这样一个函数e(t) = SP – y(t)-u(t) = e(t)*PSP——设定值e(t)——误差值y(t)——反馈值u(t)——输出值P——比例系数滞后性不是很大的控制对象使用比例控制方式就可以满足控制要求,但很多被控对象中因为有滞后性。
也就是如果设定温度是200度,当采用比例方式控制时,如果P选择比较大,则会出现当温度达到200度输出为0后,温度仍然会止不住的向上爬升,比方说升至230度,当温度超过200度太多后又开始回落,尽管这时输出开始出力加热,但温度仍然会向下跌落一定的温度才会止跌回升,比方说降至170度,最后整个系统会稳定在一定的范围内进行振荡。
如果这个振荡的幅度是允许的比方说家用电器的控制,那则可以选用比例控制2、比例积分控制(PI):积分的存在是针对比例控制要不就是有差值要不就是振荡的这种特点提出的改进,它常与比例一块进行控制,也就是PI控制。
基于BP神经网络的模糊PID控制器的设计
基于BP神经网络的模糊PID控制器的设计【摘要】工业过程控制中广泛采用PID控制,但传统PID控制因其控制参数的固定,在线整定难等问题。
为此本文研究了一种新的自适应模糊PID控制方法,为了解决模糊推理没有学习能力的问题,本文又提出了一种基于BP神经网络的自适应模糊控制方法。
此方法是模糊控制、神经网络和PID控制的有效结合。
仿真实验表明,这种基于BP神经网络的模糊PID控制算法具有良好的控制效果。
【关键词】PID控制;BP神经网络;模糊PID控制Abstruct:PID control are widely used in industrial process control,but the traditional PID control because of its control parameters are fixed,and it is difficult to adjust its parameters online.So this paper studies a new adaptive fuzzy PID control method,to solve problem without the ability to learn,and put forward a kind of adaptive fuzzy control method based on BP neural network in this paper.It is the effective combination of fuzzy control,neural network and PID control.Simulation results show that this fuzzy PID control method based on BP neural network has good control effect.Keywords:PID control;BP neural network;Fuzzy PID control1.引言常规PID在控制领域被广泛应用,利用数学算法来整定参数。
模糊pid控制实例

模糊pid控制实例
(原创版)
目录
一、模糊 PID 控制的概述
二、模糊 PID 控制的优势
三、模糊 PID 控制的实例分析
四、模糊 PID 控制的应用前景
正文
一、模糊 PID 控制的概述
模糊 PID 控制是一种基于模糊逻辑理论和 PID 控制理论的控制方法,它将 PID 控制器的精度和模糊控制器的智能化相结合,提高了控制的准确性和灵活性。
模糊 PID 控制主要应用于工业控制领域,如电机控制、温度控制等。
二、模糊 PID 控制的优势
相较于传统 PID 控制,模糊 PID 控制具有以下优势:
1.适应性强:模糊 PID 控制可以根据被控对象的特性进行自适应调整,提高了控制的适应性。
2.智能化程度高:模糊 PID 控制利用模糊逻辑理论,可以对控制对象进行智能化识别和控制,提高了控制的准确性。
3.稳定性好:模糊 PID 控制结合了 PID 控制器的稳定性和模糊控制器的智能化,使得控制系统具有较好的稳定性。
三、模糊 PID 控制的实例分析
以电机控制为例,模糊 PID 控制可以根据电机的负载情况和转速变化,自动调整电机的输出功率,实现精确控制。
在实际应用中,模糊 PID
控制可以根据不同的控制需求进行调整,实现对电机的精确控制。
四、模糊 PID 控制的应用前景
随着工业自动化技术的发展,对控制精度和控制速度的要求越来越高。
模糊 PID 控制作为一款具有高精度、高智能化的控制方法,在工业控制
领域具有广泛的应用前景。
模糊pid控制实例
模糊pid控制实例以下是一个模糊PID控制的简单实例:假设我们要控制一台电机的转速,目标是使电机转速尽可能稳定在设定值附近。
根据模糊PID控制器的工作原理,我们可以进行以下步骤:1. 设定目标值和初始设定值:设定电机转速的目标值,例如1000转/分钟。
同时设置初始的PID参数。
- 设定值(SP,Set Point)= 1000 RPM- 比例增益 (Kp) = 1- 积分时间(Ti) = 1- 微分时间(Td) = 0.12. 测量电机转速:使用传感器或编码器来测量电机当前的转速,得到当前的反馈值。
3. 模糊控制规则建立:基于当前误差(设定值减去反馈值)和误差的变化率,建立一组模糊逻辑规则,例如: - 如果误差为"NB"并且误差变化率为"PB",则输出为"NB"。
- 如果误差为"NB"并且误差变化率为"NM",则输出为"NM"。
- ...4. 模糊推理和模糊输出:根据模糊逻辑规则,进行模糊推理,即将当前的误差和误差变化率映射到模糊输出的隶属度值上。
5. 解模糊:将模糊输出映射回具体的控制量,例如根据模糊输出计算PID控制器的输出量。
6. 更新PID参数:根据误差的变化和模糊输出的结果来更新PID控制器的参数,例如根据误差的大小和变化率来调整PID参数,以使控制更加精确。
7. 反馈控制:将PID控制器的输出量应用于电机,调整电机的转速。
8. 循环控制:循环执行上述步骤,不断更新PID参数和反馈控制,使得电机转速尽可能稳定在设定值附近。
需要注意的是,以上是一个简单的示例,实际的模糊PID控制根据具体的应用情况和系统特点会有所差异。
参数的选择和模糊规则的建立都需要根据具体的控制对象进行优化和调整。
此外,在实际应用中,还需要考虑到系统的鲁棒性、性能指标等因素。
13个基于PID控制器的设计实例

13个基于PID控制器的设计实例
PID 控制器(比例-积分-微分控制器)是一个在工业控制应用中常见的反馈回路部件,由比例单元比例P(proportion)、积分单元I(integration)和微分单元D(differentiation)组成。
PID 控制器作为最早实用化的控制器已有近百年历史,现在仍然是应用最广泛的工业控制器。
PID 控制器简单易懂,使用中不需精确
的系统模型等先决条件,因而成为应用最为广泛的控制器。
PID 控制的原理及常用口诀总结
基于AT89S51 单片机的PID 温度控制系统设计
本文对系统进行硬件和软件的设计,在建立温度控制系统数学模型的基
础之上,通过对PID 控制的分析设计了系统控制器,完成了系统的软、硬件调试工作。
算法简单、可靠性高、鲁棒性好,而且PID 控制器参数直接影响控制效果。
基于ARM 与PID 算法的开关电源控制系统
本文将SAMSUNC 公司的嵌入式ARM 处理器S3C4480 芯片,应用到开关电源的控制系统的设计中,采用C 语言和少量汇编语言,就可以实现一种以嵌入式ARM 处理器为核心、具有智能PID 控制器以及触摸屏、液晶显示器等
功能的开关电源控制系统。
基于DSP 的电子负载:模糊自适应整定PID 控制策略
本系统引入模糊控制理论设计一个模糊PID 控制器,根据实时监测的电压或电流值的变化,利用模糊控制规则自动调整PID 控制器的参数。
基于FPGA 的高速PID 控制器设计与仿真
本设计使用Altera 公司的Cyclone 系列FPGA 器件EP1C3 作为硬件开发平台,对运动控制中常用的增量式数字PID 控制算法进行优化处理,提高了运。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
被控对象:
Ts = 0.1;
Plant = c2d(zpk([],[-1 -3 -5],1),Ts); %零极点模型,并离散化
根据对象Plant,确定PID参数:
C0 = pid(1,1,1,'Ts',Ts,'IF','B','DF','B'); % 定义PID结构
C = pidtune(Plant,C0) %对PID参数进行优化[Kp, Ki, Kd] = piddata(C); % 输出参数
得出PID结构及其参数值:
接下来根据求出的PID参数确定GCE、GE 、GCU 和GU的取值:由模糊PID控制结构可得如下等式:
Kp = GCU * GCE + GU * GE
Ki = GCU * GE
Kd = GU * GCE
形式转换如下:
GE = 10; %根据模糊控制的论语直接确定GCE = GE*(Kp-sqrt(Kp^2-4*Ki*Kd))/2/Ki=3.4285; GCU = Ki/GE=2.8631;
GU = Kd/GCE=2.0138;
模糊PID控制系统结构(连续模糊控制器):
模糊控制器输入输出结构:
模糊控制器输入输出隶属度函数:
模糊控制器规则表:
模糊控制器规则曲面图:
连续模糊PID控制器,仿真结果:
模糊PID控制系统结构(离散模糊控制器):
离散模糊控制器查询表:
离散模糊PID控制器,仿真结果:
主要代码如下:
(1)、对象模型:
Ts = 0.1;
Plant = c2d(zpk([],[-1 -3 -5],1),Ts);
(2)、PID参数优化:
C0 = pid(1,1,1,'Ts',Ts,'IF','B','DF','B');
C = pidtune(Plant,C0)
[Kp, Ki, Kd] = piddata(C);
(3)、比例因子确定:
GE = 10;
GCE = GE*(Kp-sqrt(Kp^2-4*Ki*Kd))/2/Ki;
GCU = Ki/GE;
GU = Kd/GCE;
(4)、连续模糊PID控制建立:
FIS = newfis('FIS','sugeno');
%%
% 定义输入E:
FIS = addvar(FIS,'input','E',[-10 10]);
FIS = addmf(FIS,'input',1,'Negative','gaussmf',[7 -10]);
FIS = addmf(FIS,'input',1,'Positive','gaussmf',[7 10]); %%
% 定义输入CE:
FIS = addvar(FIS,'input','CE',[-10 10]);
FIS = addmf(FIS,'input',2,'Negative','gaussmf',[7 -10]); FIS = addmf(FIS,'input',2,'Positive','gaussmf',[7 10]); %%
% 定义输出u:
FIS = addvar(FIS,'output','u',[-20 20]);
FIS = addmf(FIS,'output',1,'Min','constant',-20);
FIS = addmf(FIS,'output',1,'Zero','constant',0);
FIS = addmf(FIS,'output',1,'Max','constant',20);
% 定义规则:
%
% # If |E| is Negative and |CE| is Negative then |u| is -20 % # If |E| is Negative and |CE| is Positive then |u| is 0
% # If |E| is Positive and |CE| is Negative then |u| is 0
% # If |E| is Positive and |CE| is Positive then |u| is 20 ruleList = [1 1 1 1 1;... % Rule 1
1 2 2 1 1;... % Rule 2
2 1 2 1 1;... % Rule 3
2 2
3 1 1]; % Rule 4
FIS = addrule(FIS,ruleList);
gensurf(FIS) %生成模糊控制器
(5)、离散模糊控制器查询表:
Step = 2;
E = -10:Step:10;
CE = -10:Step:10;
N = length(E);
LookUpTableData = zeros(N);
for i=1:N
for j=1:N
% compute output u for each combination of break points LookUpTableData(i,j) = evalfis([E(i) CE(j)],FIS);
end
end
更多资料请访问:
徐文力新浪博客
/mybigdata。