模糊控制实例
模糊控制案例001
10) 11) 12) 13) 14) 15) 16) 17) 18) 19)
If E=Z and EC=PB or PS then U=PS If E=Z and EC=Z then U=Z If E=NS and EC=NB or NS then U=Z If E=NS and EC=Z or PS then U=PS If E=NS and EC=PB then U=PM If E=NM and EC=NB then U=PS If E=NM and EC=Z or NS then U=PM If E=NB and EC=NS or NB then U=PM If E=NM and EC=PB or PS then U=PB If E=NB and EC=Z or PS or PB then U=PB
以不是,甚至可以不是一个整数,经变
换后,是基本论域上的元素。
• 模糊控制的特点 所谓的模糊控制,既不是指被控制的 对象是模糊的,也不是模糊控制器是不确 定的,模糊控制有着自己的一套精确的理 论和算法。所谓的模糊是指在表示知识, 概念上的模糊性。虽然模糊控制器的算法 是通过模糊语言描述的,但它所完成的是 一项完全确定性的工作。
表4 模糊控制规则表格
E Ai
U Ck EC Bj
A1 PB
NM C6 R2 NB C7
A2 PM
NS C5 R4 NM C6 R5 NB C7 R3
A3 PS
Z C4 R6 NS C5 R7 NM C6 R6
A4 Z
PS C3 R10 Z C4 R11 NS C5 R9
A5 NS
PM C2 R14 PS C3 R13 Z C4 R12
A6 NM
PB C1 R18 PM C2 R16 PS C3 R15
模糊控制应用实例
模糊控制应用实例模糊控制是一种基于模糊逻辑的控制方法,它能够处理模糊的输入和输出,使得控制系统具有更好的鲁棒性和适应性。
下面将介绍一个模糊控制的应用实例。
某工厂的生产线上有一台机器人,它需要根据生产线上的物品进行分类和分拣。
由于生产线上的物品形状、颜色、大小等特征存在一定的模糊性,传统的控制方法很难实现准确的分类和分拣。
因此,工厂决定采用模糊控制方法来解决这个问题。
首先,需要对机器人的控制系统进行建模。
假设机器人的控制系统包括三个输入变量和一个输出变量。
其中,三个输入变量分别为物品的大小、颜色和形状,输出变量为机器人的动作,包括分类和分拣两种动作。
接下来,需要确定输入变量和输出变量的模糊集合和模糊规则。
假设物品的大小、颜色和形状分别属于三个模糊集合:小、中、大;红、绿、蓝;圆、方、三角。
输出变量也分别属于两个模糊集合:分类、分拣。
根据这些模糊集合,可以确定一些模糊规则,例如:如果物品大小为小且颜色为红且形状为圆,则机器人动作为分类;如果物品大小为中且颜色为绿且形状为方,则机器人动作为分拣;如果物品大小为大且颜色为蓝且形状为三角,则机器人动作为分类。
最后,需要进行模糊推理和模糊控制。
当机器人接收到一个物品时,它会根据物品的大小、颜色和形状,将它们映射到对应的模糊集合中。
然后,根据模糊规则进行模糊推理,得到机器人的动作。
最后,根据机器人的动作,控制机器人进行分类或分拣。
通过模糊控制方法,机器人可以更准确地分类和分拣物品,提高生产效率和质量。
同时,模糊控制方法还具有较好的鲁棒性和适应性,能够应对物品特征的变化和噪声的干扰。
总之,模糊控制是一种有效的控制方法,它能够处理模糊的输入和输出,使得控制系统具有更好的鲁棒性和适应性。
在工业生产、交通运输、医疗健康等领域都有广泛的应用。
模糊控制程序实例

5.2.2 .6 模糊控制器设计实例1 、单输入模糊控制器的设计【例 5.12 】已知某汽温控制系统结构如图 5.10 所示,采用喷水减温进行控制。
设计单输入模糊控制器,观察定值扰动和内部扰动的控制效果。
图 5.10 单回路模糊控制系统按表 5-2 确定模糊变量 E 、 U 的隶属函数,按表 5-3 确定模糊控制规则,选择温度偏差 e 、控制量 u 的实际论域:,则可得到该系统的单输入模糊控制的仿真程序如 FC_SI_main.m 所示,仿真结果如图 5.11 所示。
设温度偏差 e 、控制量 u 的实际论域:,选择 e 、 u 的等级量论域为量化因子。
选择模糊词集为 { NB,NS,ZO,PS,PB } ,根据人的控制经验,确定等级量 E , U 的隶属函数曲线如图 5-8 所示。
根据隶属函数曲线可以得到模糊变量 E 、 U 的赋值表如表 5-3 所示。
图5-8 E ,U 的隶属函数曲线表 5-3 模糊变量 E 、 U 的赋值表( μ )-3 -2 -1 0 1 2 3 等级量μE 、 UPB 0 0 0 0 0 0.5 1 PS 0 0 0 0 1 0.5 0 ZO 0 0 0.5 1 0.5 0 0 NS 0 0.5 1 0 0 0 0 NB 1 0.5 0 0 0 0 0依据人手动控制的一般经验,可以总结出一些控制规则,例如:若误差 E 为 O ,说明温度接近希望值,喷水阀保持不动;若误差 E 为正,说明温度低于希望值,应该减少喷水;若误差 E 为负,说明温度高于希望值,应该增加喷水。
若采用数学符号描述,可总结如下模糊控制规则:若 E 负大,则 U 正大;若 E 负小,则 U 正小;若 E 为零,则 U 为零;若 E 正小,则 U 负小;若 E 正大,则 U 负大。
写成模糊推理句 :if E =NB then U =PBif E =NS then U =PSif E=ZO then U=ZOif E =PS then U =NSif E =PB then U =NB由上述的控制规则可得到模糊控制规则表,如表 5-4 所示。
模糊控制在matlab中的实例
模糊控制在matlab中的实例模糊控制(模糊逻辑控制)是一种基于模糊数学理论的控制方法,它可以用于控制系统的稳定性、精度和响应速度等方面的优化。
在MATLAB 中,可以使用模糊逻辑工具箱(FLUS)来应用模糊控制。
以下是一个简单的实例,展示了如何使用 MATLAB 中的模糊逻辑工具箱来对温度控制系统进行控制:首先,我们需要创建一个温度控制系统,该系统将使用模糊控制来控制传感器的读数。
假设我们有四个传感器,分别为温度传感器、湿度传感器、压力和传感器,每个传感器读数为实数。
```matlab% 创建模型T = [120 100 80 50]; % 温度控制器输出R1 = [1.2 0.8 0.4 0.2]; % 湿度控制器输出R2 = [0.9 0.1 0.3 0.5]; % 压力控制器输出R3 = [1.4 0.6 0.2 0.1]; % 传感器误差P1 = [125 125 125 125]; % 温度控制器输入P2 = [100 100 90 80]; % 湿度控制器输入P3 = [85 85 80 75]; % 压力控制器输入F1 = [0.3 0.2 0.1 0.1]; % 温度控制器输出F2 = [0.4 0.3 0.2 0.1]; % 湿度控制器输出F3 = [0.5 0.4 0.3 0.1]; % 压力控制器输出y1 = [100 85 75 60]; % 实际温度y2 = [120 95 80 70]; % 实际湿度y3 = [135 110 90 80]; % 实际压力% 创建模糊控制器go1 = @(t,u,v) if t > 100 then ((1-v)*F1 + v*R1 +(1+v)*R2)/(1-v)*y1 else 0;go2 = @(t,u,v) if t < 50 then ((1-v)*F3 + v*R1 +(1+v)*R2)/(1-v)*y2 else 0;go3 = @(t,u,v) if t == 0 then ((1-v)*F1 + v*R1 +(1+v)*R2)/(1-v)*y3 else 0;% 创建模糊控制器的优化器var = [0 0 0 0];go1(0,:,:) = var;matlab.模糊控制.优化器.LevenbergMarquardt(var,go1);% 运行模糊控制器[t,u,v] = ode45(go1,[0 1],[120 100 80 50],y1);% 输出结果disp(["实际温度:" num2str(t)]);disp(["实际湿度:" num2str(u)]);disp(["实际压力:" num2str(v)]);```在这个例子中,我们使用 MATLAB 中的 ode45 工具箱来拟合温度控制器和湿度控制器的输出响应函数。
模糊控制实例
x2 2 x5 A1 ( x ) 3 , 8 x 5 x 8 3
y 5 B1 ( y ) 3 11 y 3 z 1 C1 ( z ) 3 7 z 3 5 y 8 , 8 y 11
计算机控制算法
属函数 C ( z ) 为:
(1)以连续型重心法作为解模糊化机构:首先找出
因此
z 1 1 z 3 3 2 3 z 5 3 7 z C ( z ) 5 z 6 3 1 6 z 8 3 9 z 8 z9 3 3 z 1 52 67 z 81 99 z zdz zdz zdz zdz zdz 1 3 5 6 8 3 3 3 3 3 z 3 z 1 52 67 z 81 99 z dz dz dz dz 1 3 3 3 5 3 6 3 8 3 dz 28 16 49 28 25 18 3 18 6 18 2 4 1 2 1 3 3 2 3 6 4.7
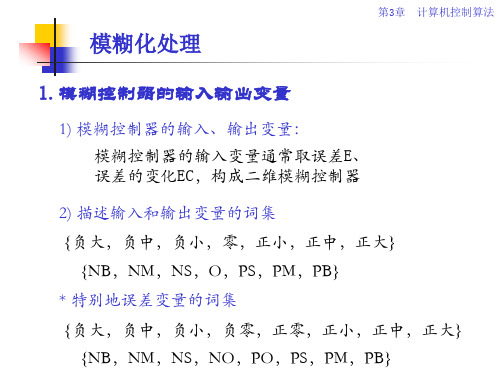
{负大,负中,负小,负零,正零,正小,正中,正大}
{NB,NM,NS,NO,PO,PS,PM,PB}
第3章
计算机控制算法
2.变量的模糊化
基本论域:某个变量变化的实际范围 误差的基本论域为 [ xe , xe ] 误差变化的基本论域为[ xc , xc ] 输出变量的基本论域为[ yu , yu ]
变量的模糊子集论域 {n, n 1,
,0,
, n 1, n}
基本论域到模糊子集论域的转换公式
2n a b y x ba 2
模糊化就是将清晰的某个输入变量按隶属度转换到与 之相对应的模糊量的过程。
第3章
计算机控制算法
选取一个模糊控制的实例讲解资料

选取一个模糊控制的实例讲解,有文章,有仿真,有详细的推导过程。
一.实验题目:基于模糊控制系统的单级倒立摆二.实验目的与要求:倒立摆是联结在小车上的杆,通过小车的运动能保持竖立不倒的一种装置,它是一个典型的非线性、快速、多变量和自然不稳定系统,但是我们可以通过对它施加一定的控制使其稳定。
对它的研究在理论上和方法上都有其重要意义。
倒立摆的研究不仅要追求增加摆的级数,而且更重要的是如何发展现有的控制方法。
同时, 它和火箭的姿态控制以及步行机器人的稳定控制有很多相似之处,由此研究产生的理论和方法对一般工业过程也有广泛用途。
本文研究了倒立摆的控制机理,用Lagrange 方法推导了一级倒立摆的数学模型,这为研究多级和其它类型的倒立摆甚至更高层次的控制策略奠定了一个良好的基础。
对系统进行了稳定性、可控性分析,得出倒立摆系统是一个开环不稳定但可控的系统的结论。
本文主要研究用极点配置、最优控制和模糊控制方法对倒立摆进行稳定控制。
最优控制方法是基于状态反馈,但能实现输出指标最优的一种控制方法,方法和参数调节较简单,有着广泛的应用。
模糊控制有不依赖于数学模型、适用于非线性系统等优点,所以本文尝试了用模糊控制对倒立摆进行控制,以将先进的控制方法用于实际中。
同时,对倒立摆系统的研究也将遵循从建模到仿真到实控,软硬件结合的系统的控制流程。
在这过程中,借助数学工具Matlab7及仿真软件Simulink,作了大量的仿真研究工作,仿真结果表明系统能跟踪输入,并具有较好的抗干扰性。
最后对实验室的倒立摆装置进行了软、硬件的调试,获得了较好的控制效果。
三.实验步骤:1.一级倒立摆系统模型的建立在忽略了空气阻力、各种摩擦之后(这也是为了保证Lagrange 方程的建立),可将一级倒立摆系统抽象为由小车和匀质杆组成的系统,本系统设定如下:小车质量M;摆杆质量m,长为l;小车在x 轴上移动;摆与竖直方向夹角为θ,规定正方向如图所示;加在小车x 轴上的力为F;拉格朗日算子L 是系统动能Ec 和势能Ep 之差,拉格朗日方程由拉格朗日算子L 和广义坐标qi ( i=1,2,3⋯n) 表示如下:Fi 为系统沿该广义坐标方向上的外力,D 为由摩擦而消失的能,本系统中可认为D=0;本系统有两个广义坐标分别是x、θ。
模糊控制在matlab中的实例
模糊控制在matlab中的实例
MATLAB 是一种广泛使用的数学软件,可以用于模糊控制的研究和应用。
以下是一些在 MATLAB 中的模糊控制实例:
1. 模糊控制器的设计:可以通过建立模糊控制器的数学模型,使用 MATLAB 进行建模和优化,以实现精确的控制效果。
2. 模糊控制应用于电动机控制:可以使用 MATLAB 对电动机进行模糊控制,以实现精确的速度和位置控制。
3. 模糊控制在工业过程控制中的应用:在工业过程中,可以使用模糊控制来优化生产过程,例如温度控制、流量控制等。
4. 模糊控制在交通运输中的应用:在交通运输中,可以使用模糊控制来优化车辆的行驶轨迹和速度,以提高交通运输的安全性和效率。
5. 模糊控制在机器人控制中的应用:可以使用模糊控制来优化机器人的运动和操作,以实现更准确和高效的操作。
这些实例只是模糊控制应用的一部分,MATLAB 作为一种强大的数学软件,可以用于各种模糊控制的研究和应用。
模糊控制应用示例讲解

0.4
0.2
0
-3
-2
NS
ZR
PS
-1
0
1
PB
2
u3
e de NB NS ZR PS PB
模糊推理规则
NB NS ZR PS PB
PB PB PS PS ZR PB PS PS ZR ZR PS PS ZR ZR NS PS ZR ZR NS NS ZR ZR NS NS NB
模糊控制系统设计
% Example 3.8 % 典型二阶系统的模糊控制 % %被控系统建模 num=20; den=[1.6,4.4,1]; [a1,b,c,d]=tf2ss(num,den); x=[0;0];
第5次课
例1:工业工程控制
例2:典型二阶环节 的模糊控 制
例1: 工业过程
例1: 某一工业过程要根据测量的温度 (t)和压力(p)来确定阀门开启的角
度: f (t, P) 这种关系很难用数
学模型精确描述。实际中由有经验的操 作员完成,因此通常可设计模糊控制器 取而代之。
输入输出变量的论域
0
0
0.5
1
1.5
2
2.5 压力 3
阀门开启角度的模糊隶属度 函数
“负” “零” “正”
1 0.8 0.6 0.4 0.2
0 -10 -8 -6 -4 -2 0 2 4 6 8 10
角度增量
隶属度函数
模糊推理规则库
模糊推理规则有3条:
If 温度“冷” and 压力“高”,则阀门角 度增量为“正”
If 温度“热” and 压力“高”,则阀门角 度增量为“负”
If 压力“正常”,则阀门角度增量为“零 ”
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第3章
计算机控制算法
模糊变量U的赋制值表
第3章
计算机控制算法
例如:设
0 . 1 0 .6 0 . 3 R1 0 . 4 0 . 7 0 . 9 0 .5 0.8 1 0 .1 0 . 4 R2 1 0.9 0 .7 0 . 8
变量的模糊子集论域 {n, n 1,
,0,
, n 1, n}
基本论域到模糊子集论域的转换公式
2n a b y x ba 2
模糊化就是将清晰的某个输入变量按隶属度转换到与 之相对应的模糊量的过程。
第3章
计算机控制算法
模糊变量E的赋制值表
第3章
计算机控制算法
模糊变量EC的赋制值表
x2 2 x5 A1 ( x ) 3 , 8 x 5 x 8 3
y 5 B1 ( y ) 3 11 y 3 z 1 C1 ( z ) 3 7 z 3 5 y 8 , 8 y 11
■
将 1 对映至第一条模糊规则的后件,可得到图中的灰色梯形区域 ;相同地,将 2 对映至第二条模糊规则的后件,可得到如图中的 黑色梯形区域 ;将此两个梯形区域以 “最大运算子 (max)” 取其 最大值,可得最后的隶属函数。最后解模糊化可得:
第3章
计算机控制算法
模糊推理过程示意图
第3章
则
0.6 0.6 R R1 R2 0.7 0.8 0.8 0.8
第3章
计算机控制算法
模糊控制实例
模糊规则一 R1:If x is A1 and y is B1Then z is C1 模糊规则二 R2:If x is A2 and y is B2Then z is C2 令 x0 与 y0 为传感器 x 与 y 之输入,模糊集合 A1、 A2、 B1 、 B2 、 C1 、以及 C2 使用下列之隶属函数:
第3章
计算机控制算法
■
■
■
读入传感器输入 x0 (t1 ) 4 以及 y0 (t1 ) 8 ,然后计算最后 的控制输出。 首先计算感应器输入 x0 (t1 ) 以及 y0 (t1 )与两条模糊规则的符合 程度为: 2 A1 ( x0 4) B1 ( y0 8) 1 3 2 1 ( y 8 ) B2 0 A2 ( x0 4) 3 3 接下来,两条模糊规则的激活强度为: 2 2 1 min A1 ( x0 ), B1 ( y0 ) min ,1 3 3 1 2 1 2 min A2 ( x0 ), B2 ( y0 ) min , 3 3 3
{负大,负中,负小,负零,正零,正小,正中,正大}
{NB,NM,NS,NO,PO,PS,PM,PB}
第3章
计算机控制算法
2.变量的模糊化
基本论域:某个变量变化的实际范围 误差的基本论域为 [ xe , xe ] 误差变化的基本论域为[ xc , xc ] 输出变量的基本论域为[ yu , yu ]制算法
(2) 以离散型重心法来解模糊化:我们将输出 量化成 1,2,...,9 等 9 个离散输出,可得
1 2 2 2 1 1 1 10 2 3 4 5 6 7 8 90 3 3 3 3 3 3 3 z* 4.7 1 2 2 2 1 1 1 3 3 3 3 3 3 3
第3章
计算机控制算法
模糊化处理
1.模糊控制器的输入输出变量
1) 模糊控制器的输入、输出变量: 模糊控制器的输入变量通常取误差E、 误差的变化EC,构成二维模糊控制器 2) 描述输入和输出变量的词集 {负大,负中,负小,零,正小,正中,正大} {NB,NM,NS,O,PS,PM,PB} * 特别地误差变量的词集
1 z 4 , 4 z7
x3 A2 ( x ) 3 9 x 3
3 x 6 , 6 x9
y4 4 y7 B2 ( y ) 3 , 10 y 7 y 10 3 z 3 3 z 6 C2 ( z ) 3 , 9 z 6 z 9 3
(3) 以 最大平均法 作为解模糊化机构:在最后的隶属函数中,其量 化值达到最大隶属函数值的有 3、4、以及 5,因此我们可以得到 :
z
m
j 1
m
zj
3 4 5 4.0 3
(4) 以修正型最大平均法作为解模糊化机构:
z 5 3 4.0 2
4 2 61
(5) 以中心平均法作为解模糊化机构:
计算机控制算法
属函数 C ( z ) 为:
(1)以连续型重心法作为解模糊化机构:首先找出
因此
z 1 1 z 3 3 2 3 z 5 3 7 z C ( z ) 5 z 6 3 1 6 z 8 3 9 z 8 z9 3 3 z 1 52 67 z 81 99 z zdz zdz zdz zdz zdz 1 3 5 6 8 3 3 3 3 3 z 3 z 1 52 67 z 81 99 z dz dz dz dz 1 3 3 3 5 3 6 3 8 3 dz 28 16 49 28 25 18 3 18 6 18 2 4 1 2 1 3 3 2 3 6 4.7
z*
3 3 2 1 3 3
14 4.7 3