最新定日镜跟踪系统设计
基于TMS320F2812DSP的定日镜跟踪控制系统的设计
笔 者采用 光 电和视 日运 动轨 迹 相 结 合 的 跟 踪 方 式 , 效避免单 一模 式 跟 踪方 式 存 在 的 不足 , 高 了 有 提 跟踪精 度 , 除 了累积误 差 , 在实 际 的工 程 项 目中 消 可
应用。
3 控 制系统设计
3 1 控制方式 分析 .
不跟踪 , 能量 的接收率相差 3 .% , 77 精确地跟踪太 阳 可使 吸 收器 的热效 率 大幅度 提高 , 而提 高整个装 置 进 的太 阳能利用 量 对控 制量 是否存 在 反 馈 , 分为开环 控制 方式 和闭环 控制 方式 两种 。开 环 可 控制是 根据太 阳运行 规律 、 日镜 位 置 ( 定 经纬 度 ) 吸 、 热器位 置等参 数及其几 何关 系 , 计算定 日镜 的控制 方 向, 此类 控制 的优点 是费用 低 、 制简 单 , 控 缺点 是 由于 机械加 工精度 和传 动机构 等原 因会存 在 累积 误差 , 而 且其 自身无法 消除 , 需要定 期校 正 。闭环 控制 是采 用
Ke rs hl s t rcig e c o o ta t cig tjc r t cig ywod : ei t ;t kn ; l t — pi akn ;r et y r kn oa a er c r l a o a
l 引 言
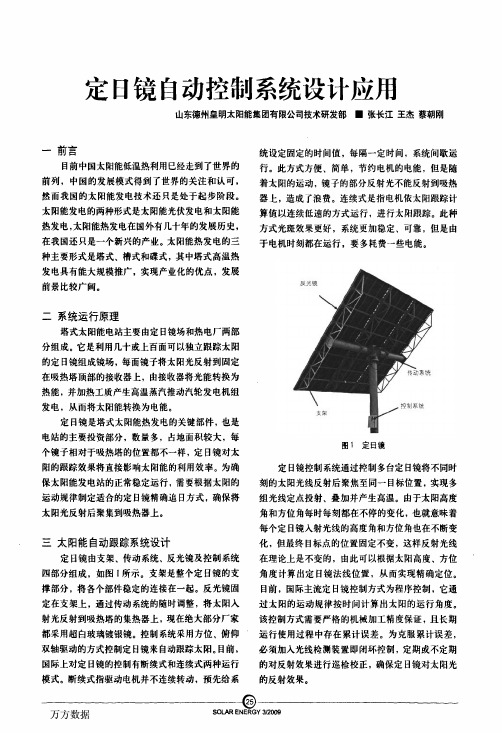
定 日镜是 太 阳能 热发系统 中关键 部件 之一 , 用于 跟踪 太 阳并 聚集 和反 射 太 阳光 进 人 吸热 器 内 的重 要 装置 , 主要 由镜 面 ( 射镜 ) 镜 架 ( 撑 结构 ) 跟 踪 反 、 支 、 传 动 机构 及其 控制 系统 等组成 , 跟踪精 度和稳定性 其 明 显影 响太 阳能 的利用 效果 。研究 表 明 , 日跟 踪与 对
定日镜自动控制系统设计应用
参考文献(3条)
1.王炳忠 太阳辐射计算讲座第一讲太阳能中天文参数的计算[期刊论文]-太阳能 1999
2.敖荣庆 伺服系统 2007 3.柴瑞娟 西门子PLC编程技术及工程应用 2006
本文链接:/Periodical_tyn200903011.aspx
◇—— 的作用,通过年度订正、经度订正、时差订正,并
综合考虑海拔高度、大气质量等地理位置条件修正, 可以得到非常精确的太阳角度值用以自动跟踪控制。
图4坐标系东西、南北轴所确定的平面为定日 镜安装所在地的地平面,天顶轴与地平面垂直且通
其中正为真太阳时。
五整体功能保障及闭环反馈解决方案 控制系统室外机为能满足不同地理环境的使用
光热光伏一体化机系统由太阳能热水器及光伏 系统组成。太阳能热水器采用双内胆水箱进行热水 的储备,在水箱顶部面向太阳光的位置紧密结合两 块面积均等的太阳电池组件,在组件及太阳能热水 器边框周围安装LED灯(图2)。
一太阳能光热光伏一体机与建筑结合方案
光热光伏一体机可安装在建筑物的坡屋面或别
图1一体机效果图
统设定固定的时间值,每隔一定时间,系统间歇运 行。此方式方便、简单,节约电机的电能,但是随 着太阳的运动,镜子的部分反射光不能反射到吸热 器上,造成了浪费。连续式是指电机依太阳跟踪计 算值以连续低速的方式运行,进行太阳跟踪。此种 方式光斑效果更好,系统更加稳定、可靠,但是由 于电机时刻都在运行,要多耗费一些电能。
数,在规定的时间内完成一次循环测试,通过以上修
2006.旺珀
万方数据
国—— 、-/ NERGY 3『2009
定日镜自动控制系统设计应用
作者: 作者单位: 刊名:
英文刊名: 年,卷(期):
张长江, 王杰, 蔡朝刚 山东德州皇明太阳能集团有限公司技术研发部
《2024年太阳能自动跟踪系统的设计与实现》范文

《太阳能自动跟踪系统的设计与实现》篇一一、引言随着环境保护和可再生能源的日益重视,太阳能的利用成为了全球关注的焦点。
太阳能自动跟踪系统作为一种提高太阳能利用效率的重要手段,其设计与实现显得尤为重要。
本文将详细阐述太阳能自动跟踪系统的设计原理、实现方法和应用前景。
二、系统设计目标本系统的设计目标是为了提高太阳能的利用率和发电效率,通过自动跟踪太阳的运动,使太阳能电池板始终面向太阳,从而最大限度地接收太阳辐射。
同时,系统应具备操作简便、稳定可靠、成本低廉等特点。
三、系统设计原理太阳能自动跟踪系统主要由传感器、控制系统和执行机构三部分组成。
传感器负责检测太阳的位置,控制系统根据传感器的数据控制执行机构进行相应的动作,使太阳能电池板能够自动跟踪太阳。
1. 传感器部分:传感器采用光电传感器或GPS传感器,实时检测太阳的位置。
光电传感器通过检测太阳光线的强度和方向来确定太阳的位置,而GPS传感器则通过接收卫星信号来确定地理位置和太阳的位置。
2. 控制系统部分:控制系统是太阳能自动跟踪系统的核心部分,负责接收传感器的数据,并根据数据控制执行机构的动作。
控制系统采用微处理器或单片机等控制器件,通过编程实现控制算法。
3. 执行机构部分:执行机构主要负责驱动太阳能电池板进行动作。
常见的执行机构有电机、齿轮、导轨等,通过控制执行机构的动作,使太阳能电池板能够自动跟踪太阳。
四、系统实现方法1. 硬件实现:太阳能自动跟踪系统的硬件主要包括传感器、控制系统和执行机构。
传感器和执行机构的选择应根据实际需求和预算进行选择,而控制系统的硬件则需根据所采用的微处理器或单片机等器件进行设计。
2. 软件实现:软件实现主要包括控制算法的编写和系统调试。
控制算法的编写应根据传感器的数据和执行机构的动作进行编程,通过控制算法实现太阳能电池板的自动跟踪。
系统调试则需要对整个系统进行测试和调整,确保系统的稳定性和可靠性。
五、应用前景太阳能自动跟踪系统的应用前景广阔,可以广泛应用于太阳能发电、太阳能热水器、太阳能干燥等领域。
塔式太阳能热发电中的定日镜跟踪系统设计
万方数据 万方数据 万方数据塔式太阳能热发电中的定日镜跟踪系统设计作者:耿其东, 朱天宇, 陈飞, GENG Qi-dong, ZHU Tian-yu, CHEN Fei作者单位:耿其东,GENG Qi-dong(盐城工学院机械工程学院,江苏,盐城,224051), 朱天宇,陈飞,ZHU Tian-yu,CHEN Fei(河海大学机电工程学院,江苏,常州,213022)刊名:热力发电英文刊名:THERMAL POWER GENERATION年,卷(期):2009,38(2)被引用次数:0次1.刘祖平一种跟踪和聚光的全新的理论[期刊论文]-中国科学技术大学学报 2006(12)2.张宝星太阳能利用的跟踪与聚集系统研究[学位论文] 20063.饶鹏.孙胜利.叶虎勇两维程控太阳跟踪器控制系统的研制[期刊论文]-控制工程 2004(06)4.张明峰PIC单片机入门与实战 20015.Soteris A.Kalogirou DESIGN AND CONSTRUCTION OF A ONE-AXIS SUN-TRACKING SYSTEM 1996(06)1.期刊论文张耀明.张文进.刘德有.孙利国.刘晓晖.王军太阳能热发电系列文章(17)70kW塔式太阳能热发电系统研究与开发(下)-太阳能2007(11)阐述了塔式太阳能热发电系统中的接收器、燃气体轮机系统、辅助系统和控制系统的有关知识;介绍了南京江宁70kWe塔式太阳能热发电系统的接收器、燃气体轮机系统、辅助系统和控制系统的构成;总结了系统建设的目的和意义,并展望塔式太阳能热发电的前景.2.期刊论文杨敏林.杨晓西.左远志.YANG Min-lin.YANG Xiao-xi.ZUO Yuan-zhi塔式太阳能热发电吸热器技术研究进展-科学技术与工程2008,8(10)近年来,塔式太阳能热发电技术得到了迅猛发展,大量实验和运行数据充分证明了其技术可行性和商业应用前景.文中较系统的回顾了塔式太阳能热发电系统吸热器技术的发展历程及现状,对应用较为广泛的熔盐吸热器、空气吸热器及水/蒸汽吸热器作了详细的分析,并展望了我国开展塔武太阳能热发电应用研究的发展方向.3.期刊论文张耀明.刘德有.张文进.孙利国.刘晓晖.王军太阳能热发电系列文章(16)70kW塔式太阳能热发电系统研究与开发(上)-太阳能2007(10)介绍了南京江宁70kWe塔式太阳能热发电系统的基本原理与总体思路;对比了太阳能级燃气轮机与普通情况下使用的燃气轮机的差别;从定日镜的光学原理、控制原理等方面出发,阐述设计、制造工作中的做法;并对定日镜场的整体布置提出了一些见解和看法.4.学位论文姚志豪太阳能塔式热发电站系统建模与控制逻辑研究2009本论文的研究对象是中国第一座MW级塔式太阳能热发电站,研究内容是对该电站进行系统建模并对系统控制逻辑进行探讨。
太阳能塔式热发电系统定日镜控制
E P QE
l S U N
传
电 机
\ /
编 A 码器
甘电、 编 器 / 一 码 B 机
随 到
EoEP
电流 传感 器 整 流
1定 日镜控 制 系统 结 构
图 1为定 口镜 控 制 系统 结 构 示 意 图 。 塔 式 热 发 电 站 的
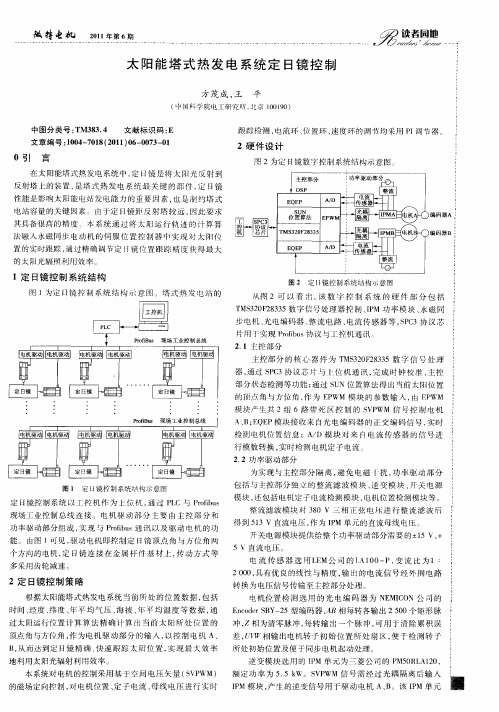
图 2 定 f镜 控 制 系 统结 构 不 意 图 {
图 1 定 【镜 控 制 系统 结 构 示 意 图 _ i
包 括 与 主控 部 分 独 立 的 整 流 滤 波 模 块 、 变 模 块 、 关 电 源 逆 开 模块 , 还包 括 电 机 定 子 电 流检 测模 块 , 机 位 置 检 测模 块 等 。 电 整 流 滤 波模 块 对 3 0 V二 相 正 弦 电 进 行 整 流 滤 波 后 8 三 得 到 5 3V直 流 电压 , 为 IM 单 元 的 直 流 母 线 电 压 。 1 作 P 开 关 电 源模 块 提 供 给 整 个 功 率 驱 动部 分 需 要 的 ± 5V、 1 +
文 章 编 号 :0 4 7 1 (0 1 0 — 0 3 0 10 — 0 8 2 1 ) 6 07 — l
2硬 件 设计
图 2为定 日镜 数 亨 控 制 系统 结 构 示 意 图 :
主 控 部分 : 率驱 动 部 功
整 流
0引 言
在太 阳能 塔 式 热 发 电系 统 中 , 日镜 是 将 太 阳光 反 射 到 定 反射 塔 上 的装 置 , 塔 式 热 发 电 系 统 最 关 键 的 部 件 , 日镜 是 定 性 能 是 影 响 太 阳能 电站 发 电 能 力 的重 要 因 素 , 是制 约 塔 式 也 电站 容 量 的关 键 因 素 : 由 于定 日镜 距 反 射 塔 较 远 , 因此 要 求 其 具 备 很 高 的 精 度 :本 系 统 通 过 将 太 阳 运 行 轨 迹 的 计 算 算 法 融 入 永磁 同步 电 动 机 的 伺 服 位 置 控 制 器 『实 现 对 太 阳位 1 1 置 的 实 时跟 踪 , 过 精 确 调 定 啊镜 位 置 跟踪 精 度 获 得 最 大 通 的 太 阳 光辐 照 利 用 效 率
太阳能自动跟踪系统的设计
太阳能自动跟踪系统的设计解决方案:跟踪系统驱动器接口电路步进电机驱动电路限位信号采集电路太阳能是已知的最原始的能源,它干净、可再生、丰富,而且分布范围广,具有非常广阔的利用前景。
但太阳能利用效率低,这一问题一直影响和阻碍着太阳能技术的普及,如何提高太阳能利用装置的效率,始终是人们关心的话题,太阳能自动跟踪系统的设计为解决这一问题提供了新途径,从而大大提高了太阳能的利用效率。
跟踪太阳的方法可概括为两种方式:光电跟踪和根据视日运动轨迹跟踪。
光电跟踪是由光电传感器件根据入射光线的强弱变化产生反馈信号到计算机,计算机运行程序调整采光板的角度实现对太阳的跟踪。
光电跟踪的优点是灵敏度高,结构设计较为方便;缺点是受天气的影响很大,如果在稍长时间段里出现乌云遮住太阳的情况,会导致跟踪装置无法跟踪太阳,甚至引起执行机构的误动作。
而视日运动轨迹跟踪的优点是能够全天候实时跟踪,所以本设计采用视日运动轨迹跟踪方法和双轴跟踪的办法,利用步进电机双轴驱动,通过对跟踪机构进行水平、俯仰两个自由度的控制,实现对太阳的全天候跟踪。
该系统适用于各种需要跟踪太阳的装置。
该文主要从硬件和软件方面分析太阳自动跟踪系统的设计与实现。
系统总体设计本文介绍的是一种基于单片机控制的双轴太阳自动跟踪系统,系统主要由平面镜反光装置、调整执行机构、控制电路、方位限位电路等部分组成。
跟踪系统电路控制结构框图如图1所示,系统机械结构示意图如图2所示。
任意时刻太阳的位置可以用太阳视位置精确表示。
太阳视位置用太阳高度角和太阳方位角两个角度作为坐标表示。
太阳高度角指从太阳中心直射到当地的光线与当地水平面的夹角。
太阳方位角即太阳所在的方位,指太阳光线在地平面上的投影与当地子午线的夹角,可近似地看作是竖立在地面上的直线在阳光下的阴影与正南方的夹角。
系统采用水平方位步进电机和俯仰方向步进电机来追踪太阳的方位角和高度角,从而可以实时精确追踪太阳的位置。
上位机负责任意时刻太阳高度角和方位角的计算,并运用软件计算出当前状况下俯仰与水平方向的步进电动机运行的步数,将数据送给跟踪系统驱动器,单片机接收上位机送来的数据,驱动步进电机的运行。
眼球运动追踪系统的设计和应用研究

眼球运动追踪系统的设计和应用研究一、引言眼球运动追踪系统是一种能够实时跟踪人眼运动的系统,它可以被广泛应用于眼动研究、人机交互、医学诊断等领域。
本文主要介绍眼球运动追踪系统的设计和应用研究。
二、眼球运动追踪系统的设计1. 硬件设计硬件设计是眼球运动追踪系统的一个重要组成部分。
一般来说,硬件包括摄像头、红外光源、滤波器等。
其中,摄像头是最重要的硬件之一,因为它需要捕捉眼球的运动。
因此,摄像头的分辨率、感光度等参数都需要考虑到。
另外,红外光源可以增强眼球的对比度,从而更容易地捕捉到眼球的运动。
滤波器是为了抑制环境光干扰,提高信噪比。
除此之外,硬件还需要具备稳定性和可靠性,否则会影响眼球追踪的准确性。
2. 软件设计眼球运动追踪系统的软件设计包括两个方面:图像处理和算法实现。
图像处理是将摄像头拍摄的视频通过一系列图像处理算法进行处理,提取出眼球的位置和运动轨迹。
算法实现则是对图像处理的结果进行分析和处理,从而得出具体的眼球运动信息。
在图像处理方面,常用的算法有PCA(主成分分析)、Hough 变换和卷积神经网络等。
在算法实现方面,常用的算法有插值算法、滤波算法和迭代算法等。
这些算法的选择应根据具体情况进行。
三、眼球运动追踪系统的应用研究1. 眼动研究眼动研究是利用眼球追踪技术研究人类视觉加工的过程。
眼球追踪技术可以帮助研究人员测量受试者在观察时注视和扫视的位置,以及注视和扫视的时间和顺序。
通过这些数据,研究人员可以探究人类视觉加工的规律,如注意力选择和记忆等方面的机制及其表达。
2. 人机交互眼球追踪技术可以用于人机交互系统,如光标控制、手势控制等。
通过追踪眼球的位置,可以实现视线控制,方便人们进行交互操作。
此外,还可以借助眼动仪的数据,设计更加有针对性的人机交互接口,让用户更加舒适和高效地完成任务。
3. 医学诊断眼球追踪技术可以用于一系列医学应用,如眼健康监测、神经疾病诊断等方面。
眼健康监测方面,可以用追踪技术检测眼睛的运动和视觉功能,判断是否存在眼疾等情况。
太阳位置自动追踪系统的设计
太阳位置自动追踪系统的设计摘要:随着太阳能利用技术的进步,太阳能系统的效率和功率输出已经成为人们关注的焦点。
为了最大程度地提高太阳能系统的效能,太阳位置自动追踪系统应运而生。
本文将介绍原理以及实现方法,并对其应用前景进行谈论。
一、引言太阳能是一种清洁、可再生的能源,具有丰富的资源和宽广的利用前景。
然而,太阳能的效率受多种因素影响,其中太阳的位置是重要的影响因素之一。
传统的太阳能系统通常接受固定的安装角度来抓取太阳的光照,但因为太阳的位置在不息变化,这种固定角度的安装方式无法充分利用太阳能资源。
因此,对于提高太阳能利用效率至关重要。
二、原理原理基于太阳在天空中的运动规律。
太阳每天从东方升起,经过正午后逐渐西沉,最后在西方落下。
太阳位置自动追踪系统通过测量太阳的方位角和高度角,实时调整太阳能系统的朝向角度,以保持最佳的光照接见效果。
详尽而言,太阳位置自动追踪系统包含三个主要组成部分:太阳位置传感器、控制算法和驱动装置。
太阳位置传感器通常接受光电二极管或CCD摄像头来感知太阳的方位角和高度角。
控制算法负责依据传感器测量的太阳位置信息计算出太阳能系统的朝向角度,并将结果传递给驱动装置。
驱动装置依据控制信号调整太阳能系统的朝向角度,以实现太阳自动追踪。
三、太阳位置自动追踪系统的实现方法1. 太阳位置传感器的选择:太阳位置传感器是太阳位置自动追踪系统的核心组件,其准确度和响应速度直接影响系统的性能。
传感器的选择要思量其测量范围、灵敏度、抗干扰能力等因素,以满足太阳位置测量的要求。
2. 控制算法的设计:依据太阳位置传感器测量的太阳位置信息,控制算法需要能够快速准确地计算出太阳能系统的朝向角度。
控制算法可以接受传统的PID控制方法或更高级的模糊控制、神经网络控制等方法,以实现最优的追踪精度和响应速度。
3. 驱动装置的选型:驱动装置依据控制信号调整太阳能系统的朝向角度,常见的驱动装置包括电动驱动装置和液压驱动装置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定日镜跟踪系统设计定日镜跟踪系统的设计定日镜在电站中不仅数量最多、占据场地最大,而且是工程投资的重头。
定日镜的跟踪效果严重影响着太阳能的利用效率。
研究表明:对日跟踪与不跟踪,能量的接受效率相差37.7%,精确地跟踪太阳可使接收器的热效率大大提高,进而提高整个装置的太阳能利用率,从而拓宽太阳能的利用领域。
一、跟踪系统的组成跟踪系统主要构成一般为:(1)太阳能采集装置;(2)转向机构;(3)控制部分;(4)贮能装置;(5)逆变器。
系统组成如图2.1所示。
图2.1 跟踪系统的基本构1.太阳能采集装置本光伏发电系统的目的即是对太阳能进行有效的吸收,从而尽可能多的把太阳能量转化为可用电能,提供给耗电负载使用,起到节省能源的目的。
但是太阳能电池本身容易破碎、易被腐蚀,若直接暴露在大气的环境中,光电转化的效率就会由于环境潮湿、灰尘、酸雨等影响而下降,最后以至于破碎失效。
不能满足本系统经久耐用的研发要求。
因此,太阳能电池需要通过胶封、层压等方式封装成平板式结构才能投入使用,如层压的封装方式,即将太阳能电池片的正面和背面各用一层透明、耐老化、黏结性好的热熔性胶膜封装,并采用透明度高、耐冲击的低铁钢化玻璃做为盖板,用耐湿抗酸的复合薄膜或者玻璃等其他材料做背板,通过真空层压工艺将电池片、正面盖板和背板薪合为一个整体,从而构成一个使用的太阳能电池发电器件,称为太阳能电池组件2.转向机构用来跟踪太阳的实时位置, 主要由底座、驱动电机、联轴器、减速机构、电池板固定框架等构成。
底座主要由普通的钢材加工而成,便于拆卸和移动。
驱动电机选用的是步进电机,此种电机性能可靠,对于角度量转向控制精确。
连轴器选用的是普遍使用的弹性联轴器,耐冲击,经久耐用。
由于研发要求系统要结构紧凑,电机选取的为小型步进电机,输出扭矩达不到转向要求,因此要选用减速机构来提升输出扭矩,在本光伏系统中,选取的是小型涡轮蜗杆减速机构;并且,太阳的角度控制要求精确,要合理的选取涡轮蜗杆减速机构的传动比,在系统设计中选用的传动比为50:1即可达到要求。
电池板固定架用来对太阳能电池板进行固定,要求设计合理,稳定。
3.控制部分要根据即时时间进行太阳角度的运算,调整系统精确转向,因此要合理选用控制芯片完成此功能。
4.贮能装置本系统的制造目的是对太阳能进行采集,并加以利用,因此需要将太阳能电池组件产生的电能储存起来,用于其他耗电场合.5.逆变器采用逆变器将蓄电池的直流电转化为普通用电器可以使用的交流电。
6.控制器为了最大限度地利用蓄电池的性能和延长使用寿命,必须对它的充电条件加以规定和控制。
二、太阳高度角和方位角的确定1、太阳角的定义如下图所示,指向太阳的向量S 与天顶Z 的夹角定义为天顶角,用θ Z 表示;向量S 与地平面的夹角定义为太阳高度角,用h 表示;S 在地面上的投影线与南北方向线之间的夹角为太阳方位角,用γ表示。
太阳的时角用ω表示,它定义为:在正午时ω=0,每隔一个小时增加15°,上午为正,下午为负。
根据Coper 方程可得:δ=23.45sin 3652dπ,(其中δ为太阳赤纬,d 为自春分日起的第d 天,春分为3月21日)1)太阳高度角计算太阳高度角的表达式为sinh=sin φsin δ+cos φcos δcos ω (1.3)式中, φ沪为地理纬度;δ占为太阳赤纬;ω口为太阳时角。
2)太阳方位角太阳方位角按下式计算,cos γ=δδδcos cosh sin sin sinh - (1.6)也可用下式计算:sin γ=cosh sin cos ωδ3)日照时间太阳在地平线的出没瞬间,其太阳高度角h=0。
若不考虑地表曲率及大气折射的影响,根据式(4.3),可得出日出日没时角表达式cos ωθ=-tan φtan δ (1.8)式中ω θ-日出或日没时角,以度表示,正为日没时角;负为日出时角。
对于北半球,当-1≤- tan φtan δ≤+1,解式(1.8),有ωθ=arccos(-tan φtan δ) (1.9) 求出时角ω θ后,日出日没时间用t=h o 15ω求出。
一天中可能的日照时间由下式给出: N=152arccos(-tan φtan δ)三、机械部分的设计(一)减速装置的选型在发电系统的研制中,要求结构紧凑,因此要选用的电机体积不能太大,由于结构的限制,电机的功率和扭矩也不会很大,不能直接带动机械转向机构做跟踪太阳的运动。
因此要选用合适的减速机构来提高扭矩,使转向机构正常运转。
为了满足整个系统结构紧凑、体积小的要求,在本机械转向机构中可以选用的减速器有以下三种:涡轮蜗杆减速器、谐波减速器和行星减速器。
这三种减速器的性能比较如表。
这三种减速器各自的特点如下:(1)蜗轮蜗杆减速器的主要特点是具有反向自锁功能,可以有较大的减速比,输入轴和输出轴不在同一轴线上,也不在同一平面上。
但是一般体积较大,传动效率不高。
(2 )谐波减速器的谐波传动是利用柔性元件可控的弹性变形来传递运动和动力的,体积不大、精度很高,但缺点是柔轮寿命有限、不耐冲击,刚性与金属件相比较差。
输入转速不能太高。
(3 ) 行星减速器其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以做的很大。
但价格略贵。
本系统由于起停比较频繁,冲击较大,因此不适合选用谐波减速器。
行星减速器虽然精度较高,但价格昂贵,也不能满足本太阳能光伏发电系统的设计初衷。
因此在本双轴跟踪机构中,选取涡轮蜗杆减速器是较为合适的。
在本设计中具体选用的涡轮蜗杆减速器为涡轮蜗杆减速箱,此减速机的结构小巧而紧凑、外形美观、体积小,箱体的各个面上都有安装孔位,可以适应各种安装方式。
(二)驱动电机的选型本太阳能自动跟踪光伏发电系统要求能够比较准确的跟踪太阳位置,因此要求驱动电机能够准确的把电信号转化为电机轴上的角位移。
本系统选取步进电机作为驱动电机。
步进电机又称为脉冲电动机,是数字控制系统中的一种执行元件。
其功用是将脉冲电信号变换成相应的角位移或直线位移,即给一个脉冲电信号,电动机就转动一个角度或前进一步。
步进电动机的移量 或者线位移量S与脉冲数k 成正比;它的转速n,或者线速度v与脉冲频率f成正比。
在负载能力范围内这些关系不因电源电压、负载大小、环境条件的波动而变化.因而可适用于开环系统中作为执行元件,使控制系统大为简化。
步进电动机可以在很宽的范围内通过改变脉冲频率来调速;能够快速反转和制动。
它不需要变换可直接将数字脉冲信号转换为角位移,很适合采用微型计算机控制。
步进电动机是纯粹的数字控制电动机。
它将电脉冲信号转变成角位移,即给一个脉冲信号,步动机就转动一个角度,因此作常适合于单片机控制。
按励磁方式分类,步进电动机可分为3大类:(1)反应式步进电动机(anv baelelrcutance,简称vR)反应式步进电动机又称为磁阻式步进电动机。
它的转子是由软磁材料制成的,转子中没有绕组。
它的结构简单,成本低,步距角可以做得很小,.但动态性能较差。
(2)永磁式步进电功机(Pemranentmanegt,简称PM)永磁式步进电动机的转子是用永磁材料制成的.转子本身就是一个磁源。
它的输出转矩大,动态性能好。
转子的极数与定子的极数相同,所以步距角一般较大。
需供给正负脉冲信号。
(3)混合式步进电动机(hybird,简称HB)混合式步进电动机也称为感应式步进电动机。
它综合了反应式和永磁式两者的优点,它的输出转矩大,动态性能好,步距角小。
在本设计中,考虑到驱动电机带动的负载较大,故选用了两相混合式步进电机做为系统驱动源。
在对多种减速装置和多种步进电机进行了对比后,确定了较适合本系统的涡轮蜗杆减速器和两相混合式步进电机应用于本系统。
具体型号在对系统进行受力分析后,根据系统的动力需求进行选取。
四、传动系统的受力分析和尺寸、角度的确定质心在中心转轴产生的力矩 M= mglsinθ,随着θ的减小而减小,方向为逆时针;考虑到平面镜是从水平面顺时针转动,风的扭矩则逆时针,则此时两者作用在中心转轴上的扭矩之和为:M总= mglsinθ+ M风由图可以看出,其中临界角度比28.6°大,考虑到不发生干涉,当θ为60°时风的扭矩最大,此时要使丝杆受力最小,则最好是质心产生的扭矩最小,则θ= 60°此时刚好丝杆的受力也几乎在质心距影响较大和风扭矩情况下大致相同。
图中a为铰动连接摇杆的最短距离,a=L1/2aL1θ假设初位置如图所示,则在初位置sin(150°-θ)丝杆力矩:M=Fcosθ· L160°从图中可以看出:当θ=30°时,该式取得最大值,得出铰连接摇杆的长,与推杆力臂的长度相同。
丝杆从初始位置到中心转轴垂线的距离l1 =0。
30°此时丝杆终点距中心转轴垂线距离 l 2 =74.55 cm (其中那个钝角算得157.3°,是一个定值,所以推杆力臂的长度越大,则行程越大,又因前式得推杆力臂尺寸越大,受力越小,则初取L 1=50cm)所以丝杆的行程l=l 1+l 2=74.55cm推杆力臂摆至右边三十度时,L 2至少89.76cm ,选95cm五、传动各部件的受力1、 推杆力臂2、铰连接3、丝杆后来丝杆受压力和座驾力臂的支撑力,和电动机的扭矩4、座驾力臂丝杆的受力六、电机和减速装置的选型确定对于丝杆受力,匀速运行,非精确计算可以套用以下公式:Ta=(Fa*I)/(2*3.14*n1)Ta:驱动扭矩kgf.mm;Fa:轴向负载N(Fa=F+µmg, F:丝杠的轴向切削力N,µ:导向件的综合摩擦系数,m:移动物体重量(工作台+工件)kg,g:9.8 );I:丝杠导程mm;n1:进给丝杠的效率选取FF3210-5丝杆,取效率n1为0.9,可知在丝杆最大受力Fa=27158N下Ta=480Nm据此可选步进电机86BYGH603电机型号步距角机身长电压电流电阻电感86BYGH603 1.8 150 2.5 5 0.5 5.5静力矩引线数转动惯量重量10 4 3.6 5依据之前选取涡轮蜗杆减速器,知符合要求,传动比48。