基于北斗的无人机快速跟踪系统设计
无人机目标跟踪与定位技术研究
无人机目标跟踪与定位技术研究近年来,无人机在工业、农业、环保、安保等领域的广泛应用,给人们的生活和工作带来了诸多便利。
其中,无人机目标跟踪与定位技术的发展,更是推动了无人机应用的广度和深度。
本文将就无人机目标跟踪与定位技术的现状、发展趋势以及对未来发展重要性的探讨。
一、无人机目标跟踪与定位技术现状在实际应用中,无人机目标跟踪与定位技术主要涉及到视觉、语音、雷达等多种技术手段。
其中,视觉技术以其高精度、高效率等特点成为了无人机目标跟踪和定位技术的主要手段。
目前较为成熟的视觉技术,主要包括图像处理、特征提取、视觉跟踪等技术手段。
其中,图像处理是视觉技术的基础,主要是指对图像进行去噪、滤波、增强等预处理工作。
特征提取是指从原始图像中提取出对目标有效、有代表性的特征。
视觉跟踪是指在一定时间内,通过连续采集的图像,在保持目标识别与跟踪的前提下,对目标进行跟踪与定位。
另外,语音技术和雷达技术也在无人机目标跟踪与定位中发挥着重要作用。
语音技术通过对目标所发出的声音进行分析,实现目标定位与跟踪。
雷达技术则利用微波信号对目标进行扫描,从而定位目标位置。
二、无人机目标跟踪与定位技术的发展趋势随着技术的不断发展,无人机目标跟踪与定位技术也正在朝着高精度、高效率、高可靠性的方向不断发展。
未来,随着芯片技术的进化、软件算法的智能化、传感器设备的升级等多方面的技术创新,无人机目标跟踪与定位将迎来新的发展趋势。
一是数据融合技术的不断发展。
相较于单一传感器设备,多传感器设备联合应用,数据融合技术可以大大提升无人机目标跟踪与定位的精度和可靠性。
因此,运用数据融合技术,将多种传感器设备联合应用于无人机目标跟踪与定位,已成为未来发展的重要趋势。
二是深度学习技术的应用。
深度学习技术可以使计算机自动学习和理解复杂模式,从而实现更精准的目标跟踪与定位。
未来,随着深度学习算法的进一步发展以及计算硬件设施的升级,深度学习技术将成为无人机目标跟踪与定位的主流技术手段。
基于北斗导航的车载定位终端设计与实现

定 位 终 端 系 统 软 件 ,利 用 北 斗 用 户 机 功 能模 块 ,结 合 GIS系 统 地 图 引 擎 API,设 计 和 实 现 l『一 个 车 载 定 位 终 端 ,能 给 车 辆 提 供 定
位 、导航 、通 信 等 功 能 ,并 具 备 成 本 低 、功 耗 小 、性 能 高 的特 点 。
根据 系统 框架 图 ,利 用 W inCE操 作 系 统 在 硬 件 平 台 上 进 行 车 载 导航 终端 各 功 能模 块 的整 合 ,各 模 块 配 合 相 应 的软 件 驱 动 , 完 成 指定 的功 能 ,如 对 定 位 信 息 进 行 数 据 处 理 ,计 算 所 在 位 置 的 经 度 、纬 度 、海 拔 、速度 和时 间等 ,并 实 时获 取 定 位 的参 数 。
基 于北 斗 导 航 的车 载 定 位 终 端设 计 与实 现
基于北斗导航的车载定ຫໍສະໝຸດ 终端设计与实现 Vehicle Tracking Term inal System Based on BeiDou Navigation
张 雷 (西安建筑科技大学信息与控制工程 学院,陕西 西安 710055)
Keywords:BeiDou navigation,real- tim e positioning,e—m ap,query
由于 W inCE操 作 系 统 的 可 裁 剪 性 和 高 实 时 性 ,本 文 在 众 多
嵌 入 式 操 作 系统 中选 择 市 场 主 流 WinCE6 0操 作 系 统 作 为 车 载
由于 应 用 环 境 条 件 限 制 ,汽 车上 电 子元 件 众 多 ,电磁 环 境 复 杂 ,车载 电源 不 可 能 是 非 常 稳 定 的 电 源 ,往 往 在 发 动 机 启 动 过 程 中 ,电压 会 出现 大 幅度 波 动 。不 仅 如 此 ,电 源输 入 端 在 热 插 拔 时 , 线 路 上 的 电流 也 会 发 生 较 大 变 化 ,产 生 浪 涌 ,这 种 高 能量 的 瞬 态 过压脉 冲容易造成负载 电路损坏或击穿 。为了提高设备的稳定 性 和 可靠 性 ,在 车 载 终 端 内 部 增 加 电 源 保 护 模 块 ,外 部 电 源 接 人 后 首 先 经 过 电源 保 护 模 块 处 理 ,再 将 电源 供 给 核 心 板 和 底 板 。 导航 终端 的硬 件 结 构 如 图 1所示 。
无人机自动跟踪原理

无人机自动跟踪原理
无人机自动跟踪原理是指无人机通过固定或移动的目标物体,利用特定的跟踪算法和传感器技术,在空中自主追踪目标物体的过程。
其主要原理包括:
1.图像处理技术
无人机自动跟踪需要借助图像处理技术,通过摄像头获取目标物体的实时图像,并进行处理和识别,确定目标物体的位置、方向和速度等信息。
2.传感器技术
无人机需要配备各种传感器,如陀螺仪、加速度计、GPS等,以便实时获取自身姿态、速度和位置等信息,从而更精确地计算出追踪目标的轨迹。
3.控制系统
无人机自动跟踪的实现需要控制系统的支持,包括飞控芯片、无线通讯模块和电机等硬件设备,以及编制好的控制算法。
4.跟踪算法
无人机自动跟踪需要采用一系列跟踪算法,如光流法、Kalman滤波算法、模板匹配算法、深度学习算法等,以便更准确地跟踪目标物体,
同时避免受到光照和环境因素的影响。
5.安全保障
在实际的应用过程中,无人机自动跟踪需要具备足够的安全保障措施,包括避障系统、碰撞检测、自动返航等功能,以确保无人机在追踪过
程中不会撞击到障碍物或受到不可预测的外界干扰而失控。
总之,无人机自动跟踪原理是一项复杂而精密的技术,需要综合运用
多种技术和算法进行实现,并且需要不断优化和升级,以满足日益复
杂的应用需求。
无人机频谱远距离探测和高精度测向

第21期2022年11月无线互联科技Wireless Internet TechnologyNo.21November,2022作者简介:赵紫稷(1989 ),男,黑龙江哈尔滨人,工程师,硕士;研究方向:雷达信号处理㊂无人机频谱远距离探测和高精度测向技术探索赵紫稷(中船重工第八研究院,江苏㊀南京㊀211106)摘㊀要:在深入分析无人机频谱远距离探测技术与高精度测向技术的过程中,相关人员要深入探讨无人机频谱远距离探测技术与高精度测向技术的相关原理,通过研究无人机频谱远距离探测和测向技术的具体应用范围,探索无人机探测技术的发展趋势㊂在此基础上,文章总结了频谱探测技术在无人机探测与反制探测领域的具体应用情况,为无人机的应用研发和创新提供参考㊂关键词:无人机频谱;远距离探测技术;高精度测向技术0㊀引言㊀㊀在科技水平不断提升的背景下,我国各领域的发展也越来越快㊂频谱探测技术是我国高新技术中的重要技术类型,尤其在无人机行业发展过程中,频谱探测技术的应用范围不断扩大㊂各种新进科学技术的发展可以推动无线电技术的发展,不同电子设施的应用范围也不断扩大,由此可以形成紧密的电磁网,为我国无人机频谱探测技术的发展提供了坚实基础㊂在实际研究中,相关人员只有全面掌握无人机频谱远距离探测和高精度测向技术的应用原理,拓展无人机频谱远距离探测技术与高精度测向技术的应用范围,明确在无人机探测技术应用过程中存在的问题,才能对技术进行深入研究,促进技术创新与发展㊂1㊀无人机频谱远距离探测技术存在的问题㊀㊀目前,电子频谱探测技术的应用受到世界各国的广泛关注,例如美国在研究过程中的典型系统包括民用航空无线电干扰监测系统IMDS,主要是对民航通信导航等占用频谱进行有效监测;狼群网络系统的主要功能是战场捕获敌方雷达和通信;GPS 导航干扰监测系统也属于无人频谱探测技术的典型应用[1]㊂此外,德国短波信号监测㊁韩国非法电磁信号监测网络㊁我国的频谱专项感知研究与验证等项目都是对频谱探测技术的研究与应用项目㊂近年来,我国低空空域被逐步开放,无人机技术产业以及应用发展速度越来越快,但是随之而来的低空安全隐患越来越突出㊂无人机探测以及反制技术成为当前的研究热点㊂近些年,我国低空空域被逐步开放,无人机技术产业以及应用发展速度越来越快,但是随之而来的低空安全隐患越来越突出㊂无人机探测以及反制技术成为当前的研究热点㊂因为无人机具有低慢小的特点,目标机动也比较复杂,速度比较慢,雷达反射截面积比较小,所以现有的雷达无法有效探测无人机远距离目标㊂频谱探测技术在使用过程中需要获取无人机的遥控和回传信息,从而对无人机进行监测㊁识别㊁定位㊁跟踪㊁干扰打击㊂作为性价比较高的手段,无人机的发展越来越受到关注㊂在无人机应用中可以对无人机信号进行远距离探测,但是因为接收灵敏度在同一中频宽带下的差别比较小,获取的信号准确度不高㊂因此,需要对弱信号检测技术进行优化,加强无人机频谱测探效果研究十分重要㊂频谱资源作为国家发展过程中的重要战略资源,在无线电技术快速发展㊁电子设备不断增加的情况下,其作用越来越突出㊂随着电子信号不断交织,相关人员对频谱资源进行应用时,可以共用无线通信信道,但是受自然电磁环境的影响,会形成复杂快变的电磁空间,导致探测效果不佳㊂此外,因为无人机目标机动也比较复杂,速度比较慢,雷达反射截面积比较小,现有的雷达无法有效探测无人机远距离目标㊂在获取无人机远距离目标信号时,在同一中频宽带下的信号差别比较小,直接影响了信号获取的准确度㊂因此,为了提升无人机频谱测探效果,尤其是提升远距离探测结果的准确性,相关人员需要研究频谱设备的天线增益,利用定向喇叭天线完成空域探索任务㊂此外,相关人员还需要利用全空域监测阵列,采用幅度关系完成目标信号方位计算工作,提高测向精度㊂2㊀对无人机频谱远距离探测技术与高精度测向技术的应用2.1㊀改进频谱设备,提升远距离探测的可靠性2.1.1㊀全向天线增益设计㊀㊀当前,大多数频谱设备主要利用全向天线完成信号探测,但是全向天线的增益存在一定限制,无法有效优化增益,大多保持在2dBi 左右,探测距离为2km 左右㊂为了解决天线增益限制问题,在无人机研发过程中,一些企业对无人机频谱侦测设备进行设计增益,使其增益达到12dBi,定向喇叭天线也可以完成空域探索任务㊂在信号幅度相同的情况下,探测距离与全向探测能够提高3倍左右㊂对全向双锥无源天线的增益情况进行研究,可以确定其在6GHz 以下,频段天线增益维持在2dBi 左右㊂在定向监测的增益测试中,2~6GHz 频段增益保持在11~12dBi㊂由此可以确定,喇叭天线增益比全向监测天线增益高9.5dBi 左右[2]㊂无线信号空间衰减模型:Ls (dB)=32.4+20Lgf(MHz)+20LgD(km)㊂以此为基础进行计算,假设作用的距离增加n倍时,9.5=20lg n,反对数n=3,代表增益高9.5dBi的喇叭侦测天线作用距离比全向双追侦测天线作用距离高3倍㊂设备预计侦测距离为10km,在实际研究中需要通过图传信号进行分析,利用全向天线进行发射并经过空间传播到接收天线,接收天线后即为侧向开关矩阵,可以对信号进行放大和选择输出,最后通过射频电缆发送到车上接收机㊂2.1.2㊀侦测设备灵敏度优化㊀㊀在测试LK-WDF001侦测设备灵敏度的过程中,相关人员发现,6GHz频段的灵敏度可以达到-100dbm,这代表信号满足最低灵敏度要求,意味着探测系统在估计自动探测和识别方面存在一定难度,探测精度受到影响㊂因此,需要将天线接收信号与低噪放电路连接,低噪放设计增益为11dB,开关矩阵噪声系数为5,系统灵敏度能够提高6dB,有利于开展信号自动探索以及信号识别工作,提升无人机频谱远距离探测结果的可靠性㊂2.2㊀高精度测向技术优化设计2.2.1㊀计算目标信号方位㊀㊀无人机探测设备主要应用于5GHz以上频段,在这一频段使用相位法测量无法获取理想的测向效果㊂在这种情况下,LK WDF001设备需要利用全空域监测阵列,采用幅度关系完成目标信号方位计算工作㊂其中,1号对周与1号喇叭可以通过2选1开关进行选通,然后通过低噪放电路进行输出,其他7组天线以同样的方法输出㊂输出的8组信号完成两个5选1开关输出两路信号后,可以将其输入测向接收机㊂两层天线列阵在空间上需要错开布置,以上下方式安装,喇叭测向阵列为下层,对周测向阵列在下层㊂天线内部安装结构以8个喇叭天线合成的阵列天线为主㊂2.2.2㊀分析数据对应方向㊀㊀分析合成方向,如果目标信号从某一个方向进入天线阵列,每一个喇叭接收的幅度值会存在明显差异,并且信号入射的方位与幅度分布具有唯一映射关系㊂通过唯一映射关系研究可以掌握信号幅度的分布关系,获取信号入射范围㊂一般情况下,幅度相关工程实现方法主要是通过电子开关选通1号到8号天线,对目标频点信号带内平均功率进行有效采集,获取天线接收的平均功率值㊂将获取的数据和样板库内相同频点数据进行对比,获取相关系数㊂数据相关系数最大时,说明数据对应方向值为来波方向值㊂2.2.3㊀计算天线幅度系数㊀㊀在工程应用中发现,高增益定向天线构建的测向阵列受天线源强烈的方向特性影响,在远距离目标信号采集过程中,很多天线源无法有效接收信号㊂受这种情况影响,需要引入8个天线幅度完成相关系数计算,导致测向结果的准确度受到影响㊂因此,相关人员需要开发相邻幅度法测向算法,可以将数据筛选和数据统计方法有效结合,提高无人机图传信号的精准性㊂同时,相关人员可以使用累计幅度统计方法,以低成本的硬件架构为基础,对遥控器的高速跳频信号进行测向㊂根据这一方法研发的无人机侦测设备外场实测探测距离能够达到8km以上,测向精度也可以达到3ʎ左右[3]㊂3 无人机频谱远距离探测与高精度测向技术的应用3.1㊀在重要区域防护中的应用㊀㊀无人机频谱远距离探测和测向技术的应用有助于完成重要区域防护工作,特别是对监狱㊁机场等重要区域进行防护时,利用集中式协作频谱探测技术构建TDOA无人机定位系统,可以对整个区域内400MHz至6GHz的无线电信号进行全面扫描㊁采集,并将信号存储在对应的系统内,根据数据使用需求完成测量分析,实时发现位置信号,之后通过频谱特征库匹配对无人机目标进行识别㊁定位和跟踪[4]㊂在重要区域防护过程中,需要加强传感器部署工作,要确保传感器位置和数量与地形条件相适应㊂传感器站点越多,定位精度越高,一般在重点防护区域需要部署4个传感器节点㊂在传感器节点布设过程中,最好按照正方形分布,每个传感器相距1~2km,位置标定为1m㊂无线传感器主要由宽带天线㊁配套线缆和信号接收器组成㊂在信号采集和预处理完成后,相关人员需要将采集的数据回传到融合中心㊂例如:无人机以直径300m㊁高度50m进行环绕飞行时,获取的无人机图传和控制信号强度为-80dbm~-90dbm,图传信号为宽带信号,控制信号为窄带慢速变频信号㊂在获取可疑信号时,系统可以直接切换到识别模式,如果识别为无人机信号会转为定位跟踪模式,并给出无人机定位的具体信息㊂利用周期性持续定位,相关人员可以获取无人机的飞行轨迹,通过频谱特征识别以及对比工作能够准确掌握无人机的型号㊂在基于3个节点的探测覆盖测试系统应用过程中,传感器需要设置在比较开阔的江面,两岸距离为1km,高度为15m,天线增益为2dBi㊂在对无人机信号进行检测时,灵敏度为3dB,无人机的高度固定在20m,系统对2.4 GHz附近的信号频谱进行监测㊂可以确定站与站之间的距离为1km时,距离不同站0.4km范围内的区域定位精度比较高,探测威力受天线高度㊁无人机飞行高度和大气衰减等不同因素的影响较大㊂在监测过程中,相关人员需要根据现场情况合理调整无人机频谱远距离探测与高精度测向方案,确保探测结果的可靠性㊂3.2㊀在探测与反制中的实践㊀㊀深入研究无人机的目标特性和频谱发射源定位技术有助于将其运用在探测和反制领域㊂无人机利用TDOA交叉定位方法能够制造出可以在不同环节与地点应用的探测仪㊂例如:多普勒测量仪㊁干涉仪测向机等,并使用交叉定位方式发挥测向仪的积极作用,实现完美的结合效果㊂TDOA本身的定位精度比较高,系统运行比较简单,出现的问题也比较少,将其应用在无人机系统内具有实用性和经济性,可以在大规模探测工作中应用㊂特别是在重点区域防护过程中,相关人员可以利用集中协作频谱探测技术构建无人机定位系统,掌握区域内的不同信号和消息,提升重点区域综合防护效果㊂此外,利用无人机技术进行定位可以分配无人机的位置和数量,最大限度地提高探测精度,保证定位效果㊂在无人机反制应用方面,系统一般由光电跟踪设备和无线电干扰器组成,锁定相应的目标后,可以及时完成定位,之后需要对无人机系统干扰㊂为了达到理想的效果,常用的干扰方式主要包括反制式干扰和欺骗式干扰㊂反制式干扰是对高频率信号进行干扰;欺骗式干扰主要是对无人机进行欺骗,方便对无人机进行捕捉㊂相关人员需要根据具体的情况合理选择干扰方式,获取更多的情报信息,保护无人机以及定位系统正常稳定运行㊂4㊀无人机频谱探测技术应用前景㊀㊀无人机频谱远距离探测和高精度测向技术发展过程,受卫星导航定位系统㊁数字通信系统等科学技术的影响较大㊂随着科学技术的不断发展,无人机逐渐从军用领域朝着民用领域普及㊂近年来,消费级无人机越来越多,无人机自主导航和监控技术的发展也越来越快㊂我国自主制造的北斗导航系统是无人机定位设备安全飞行的重要保障㊂RTK技术可以提高无人机的定位精准度㊂网络RTK可以解决单基准站和人工架设参考站存在的距离短和信号弱等问题㊂相关人员对无人机自主导航技术的深入研究推动了我国无人机技术的广泛应用,也丰富了无人机的功能㊂目前,国内惯导技术不断成熟,无线通信技术也在不断发展㊂远距离无人机测控技术也越来越成熟㊂在今后的研究过程中,相关人员需要根据社会发展对无人机的具体需求,提高无人机远距离探测水平,可以在电力监测㊁远海监测和桥梁监测中充分应用无人机探测技术,达到节省人力㊁物力,提高任务执行效率的目的[5]㊂此外,在森林灭火和高空灭火等援救过程中,无人机有助于提高火灾现场的探测效率,掌握火灾情况,对加快救援进程㊁缩短救援时间㊁挽救人们的生命和财产有积极作用㊂同时,相关人员还要从无人机飞行规范等角度出发,约束无人机的应用,防止非法使用无人机㊂5㊀结语㊀㊀在无人机技术不断发展的情况下,研究无人机远距离频谱探测技术与高精度测向技术㊁提高远距离探测技术和高精度测向技术的应用效果是推动无人机行业长远稳定发展的重要前提㊂在当前的无人机远距离探测技术和高精度测向技术研究过程中,研究人员需要综合分析相关理论,通过结构设计㊁模型搭建和数据仿真等不同方法深入掌握技术的发展趋势,为后续无人机反制技术的进一步发展奠定基础㊂[参考文献][1]荣思远.基于超分辨测向技术和方向交汇定位算法的无人机探测系统研究[J].空中交通,2017(4):33-38.[2]汤金.基于北斗的无人机高精度自主导航与监控技术研究[D].哈尔滨:哈尔滨工程大学,2019.[3]谭畅.无人机无源测向方法与实现技术研究[D].成都:电子科技大学,2019.[4]李光伟,费晓燕,刘彦明,等.频谱探测技术在无人机探测与反制领域的应用[J].警察技术,2019(3):5.[5]沈建潮,朱辉.基于无人机的无线电监测测向系统校准方法研究[J].中国无线电,2018(1):4.(编辑㊀王永超) Research on spectrum remote detection and high precisiondirection finding technology of UAVZhao Ziji(The Eighth Research Institute of China Shipbuilding Industry,Nanjing211106,China) Abstract:In the process of in-depth analysis of UAV spectrum remote detection technology and high precision direction finding technology,the relevant principles of UAV spectrum remote detection technology and high precision direction finding technology must be deeply discussed.In this research process,the specific application range of UAV spectrum remote detection and direction finding technology is mastered,and the development trend of UAV detection technology is preliminarily studied.On this basis,the application of spectrum detection technology in UAV detection and countermeasures is summarized.It provides some reference for UAV application research and development and innovation.Key words:UAV spectrum;remote detection technology;high precision direction finding technology。
无人机光学跟踪系统研究与应用

无人机光学跟踪系统研究与应用无人机是一种重要的无人机载体,其多种多样的应用让人们对无人机的研究和开发产生了浓厚的兴趣。
无人机光学跟踪系统则是无人机的重要技术之一,在无人机的自主导航和控制、无人机的目标跟踪等方面都有着非常广泛的应用和研究。
一、无人机光学跟踪系统的概述无人机光学跟踪系统是指对空中目标进行光学跟踪,通过摄像机、对焦系统和图像处理算法实现无人机的指引控制和信息获取。
目前,无人机光学跟踪系统已经广泛应用于军用和民用领域,如侦查、巡逻、监视等。
二、无人机光学跟踪系统的技术方法1.光学跟踪技术光学跟踪技术是无人机光学跟踪系统的核心技术之一,它包括了摄像机的成像、对焦系统、图像处理算法等。
其中,图像处理算法是光学跟踪技术的关键,目前较为常用的图像处理算法有相关算法、卡尔曼滤波算法等。
2.目标检测与识别技术目标检测与识别技术是无人机光学跟踪系统的另一项核心技术,它主要通过目标检测算法和目标识别算法实现对目标的检测和识别。
其中,目标检测算法主要是基于图像分割、边缘检测等方法实现对目标的快速识别,而目标识别算法则主要是基于特征提取等方法实现了更加准确的目标识别。
三、无人机光学跟踪系统的应用无人机光学跟踪系统在各个领域的应用十分广泛,如侦查、巡逻、监视等。
其中,最为重要的是在军事领域的使用。
实际上,随着无人机应用领域的不断扩大,无人机光学跟踪系统的应用场景也在不断扩大,如随着无人机在消防、环保等领域的应用,无人机光学跟踪系统在这些领域也有着越来越广泛的应用。
四、无人机光学跟踪系统的发展趋势随着无人机应用领域的不断扩展,无人机光学跟踪系统的发展趋势也在不断演变。
具体来说,未来无人机光学跟踪系统的研究重点将会放在以下方面:1.提高系统性能未来无人机光学跟踪系统的研究将会重点关注提升系统性能,如增加光学系统的分辨率、加强对目标的识别能力、提高图像处理算法的准确性等。
2.加强目标识别和跟踪技术未来无人机光学跟踪系统的研究将会重点关注加强目标识别和跟踪技术,如优化目标检测和识别算法、增加目标跟踪算法的准确性、提高对目标的跟踪精度等。
基于北斗导航定位系统的伪卫星技术研究

基于北斗导航定位系统的伪卫星技术研究一、本文概述随着科技的飞速发展,全球定位系统(Global Positioning System,GPS)在军事、民用等多个领域发挥了巨大作用。
依赖单一系统的风险逐渐显现,特别是在复杂环境和关键领域,如航空、航海等,多系统融合定位技术成为了研究的热点。
北斗导航定位系统(Beidou Navigation Satellite System,BDS)作为我国自主研发的全球卫星导航系统,其独特的优势和广泛的应用前景,使得基于北斗导航定位系统的伪卫星技术研究显得尤为重要。
伪卫星技术,也称为地面增强系统(Ground Augmented System,GAS),通过在地面设置类似于卫星的信号发射装置,可以增强或补充卫星导航信号,提高定位精度和可用性。
本文旨在深入研究基于北斗导航定位系统的伪卫星技术,分析其工作原理、系统架构、关键技术以及应用场景,为我国在全球导航卫星系统领域的技术创新和应用发展提供参考。
本文将首先介绍北斗导航定位系统的基本原理和发展现状,为后续伪卫星技术的研究奠定基础。
随后,详细阐述伪卫星技术的基本概念和关键技术,包括信号生成、传输、接收和处理等方面。
在此基础上,探讨伪卫星技术在不同应用场景下的优势和挑战,以及未来的发展趋势。
对全文进行总结,并指出需要进一步研究的问题和方向。
通过本文的研究,我们期望能够为北斗导航定位系统的伪卫星技术提供更加全面、深入的理论支持和实际应用指导,推动我国在全球导航卫星系统领域的技术进步和应用创新。
二、北斗导航定位系统分析北斗导航定位系统(BDS)是中国自主研发的全球卫星导航系统,旨在为全球用户提供全天候、全天时、高精度的定位、导航和授时服务。
该系统由空间段、地面段和用户段三部分组成,其中空间段包括地球静止轨道卫星、倾斜地球同步轨道卫星和中地球轨道卫星等多种类型的卫星,共同构成覆盖全球的卫星网络。
在技术特点上,北斗导航定位系统采用了三频信号、星间链路、区域短报文通信等独特设计,提高了系统的可用性和精度。
一种无人机群目标的跟踪方法与流程

无人机技术的快速发展使得无人机裙体在军事、商业和科研领域中得到了广泛的应用。
无人机裙体的目标跟踪是无人机应用的重要组成部分之一,针对无人机裙体目标跟踪方法的研究和探索对于提高无人机的智能化水平和实际应用能力具有重要意义。
在无人机裙体目标跟踪中,精准的目标定位和跟踪是至关重要的。
针对此问题,我们提出了一种基于深度学习和协同控制的无人机裙体目标跟踪方法与流程。
下面将详细介绍这种方法和流程。
1. 目标检测与识别在无人机裙体目标跟踪中,首先需要进行目标的检测与识别。
我们采用深度学习算法,利用卷积神经网络对目标进行检测与识别。
通过大量的训练数据和优化的网络结构,我们能够准确地识别目标的位置和特征,为后续的跟踪提供了可靠的数据支撑。
2. 目标追踪与路径规划在目标检测与识别之后,无人机裙体需要对目标进行追踪与路径规划。
我们采用协同控制算法,将各个无人机之间进行信息交换和协同合作,实现对目标的多角度追踪和路径规划。
通过合理的路径规划,可以使无人机裙体在追踪目标的过程中保持一定的间距和相对位置,避免发生碰撞或者遮挡现象,确保跟踪效果的稳定和可靠性。
3. 飞行控制与动态调整在目标的追踪过程中,无人机裙体需要不断进行飞行控制和动态调整。
我们设计了一套自动化的飞行控制系统,能够根据目标的位置和运动状态,实时调整无人机的飞行轨迹和速度,确保无人机能够始终保持在最佳的追踪位置,并及时对目标进行跟踪和观测。
4. 数据融合与信息传递在无人机裙体目标跟踪过程中,各个无人机需要不断地进行数据融合和信息传递。
我们引入了分布式信息处理和通信技术,实现了无人机之间的高效信息传递和数据共享。
通过数据融合和信息传递,可以提高无人机裙体的整体感知和决策能力,保证跟踪过程的准确性和稳定性。
5. 安全保障与应急措施在无人机裙体目标跟踪过程中,安全保障和应急措施是非常重要的。
我们设计了一个完善的安全保障系统,包括对飞行环境的实时监测和预警,以及针对意外情况的应急措施和自主避障能力。
第六届北斗杯全国青少年科技创新大赛(BD-CASTIC2015)优秀奖作品名录(大学组)
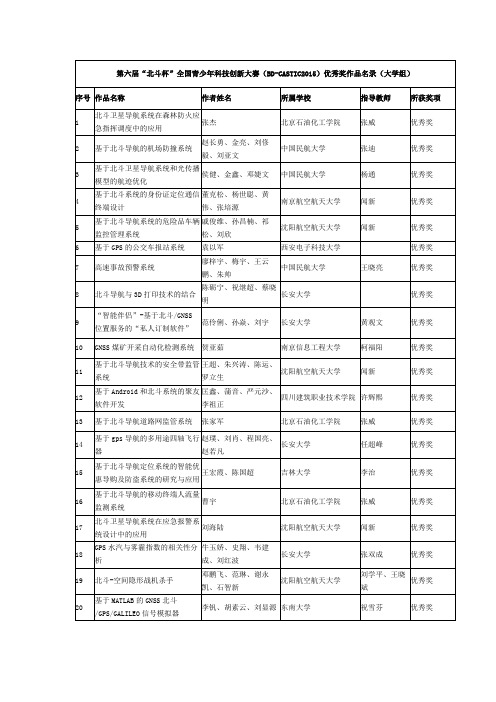
基于北斗导航定位系统的智能优惠导购及防盗系统的研究与应用
王宏霞、陈国超
吉林大学
李治
优秀奖
16
基于北斗导航的移动终端人流量监测系统
曹宇
北京石油化工学院
张威
优秀奖
17
北斗卫星导航系统在应急报警系统设计中的应用
刘海陆
沈阳航空航天大学
闻新
优秀奖
18
GPS水汽与雾霾指数的相关性分析
牛玉娇、史翔、韦建成、刘红波
竞赛奖
9
基于北斗卫星导航系统的可移动深远海渔业养殖系统
孙忠睿、刘智奇、刘家林、薛原
沈阳航空航天大学
闻新、杨靖宇
竞赛奖
10
基于北斗卫星定位功能与物联网技术的位置安全新方案
刘智奇、薛原、孙忠睿、刘家林
沈阳航空航天大学
闻新
竞赛奖
11
基于北斗导航系统的运钞车监控管理系统
徐昕迪
沈阳航空航天大学
闻新
竞赛奖
12
基于北斗导航系统的军事防反叛系统研究
闻新
优秀奖
53
基于北斗卫星的向导电子地图
韩延廷、陈蓉、王琦、李许光
中国民航大学
杨通
优秀奖
54
基于北斗系统的小孩智能防撞防丢定位可穿戴设备
陈佳馨、武思开、马松辉、王鹏飞
中国民航大学
夏冬
优秀奖
55
基于北斗导航和移动通信技术的汽车防盗系统
吉同晖、阴笑笑、陈浩哲、邹野
北京科技大学
王丽娜
优秀奖
56
基于北斗的节能型智能公交电子站牌的应用
廖梓宇、梅宇、王云鹏、朱帅
中国民航大学
王晓亮
优秀奖
8
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验研究
Experimental Research
025
电子制作
【文章摘要】
无人机快速跟踪系统在实际应用中存
在较多的技术难题等待解决,本文引入北
斗导航系统,解决其相关技术瓶颈,实现各
类复杂场景下的实时跟踪,并完善目前无人
机快速跟踪系统的两个应用,提出了接力跟
踪协同系统的新概念,并总结了其几个技术
难点和解决方式。
【关键词】
北斗;无人机;快速跟踪系统;接力跟踪
协同系统。
0引言
无人驾驶飞机简称“无人机”,是利用
无线电遥控设备和自备的程序控制装置操纵的
不载人飞机。无人机以其体积小、重量轻、机
动性好、飞行时间长和便于隐蔽的特点,在现
代战争中正发挥着越来越大的作用。自动跟踪
系统是连续跟踪并测量运动目标轨迹参数的系
统。自动跟踪系统的目标是以一定速度和加速
度运动的车辆、舰船、飞机、导弹和人造卫星
等。自动跟踪系统可提供运动目标的空间定
位、姿态、结构行为和性能,是运动目标的多
功能和高精度的跟踪和测量手段。中国北斗卫
星导航系统是中国自行研制的全球卫星导航系
统。是继美国全球定位系统(GPS)、俄罗斯
格洛纳斯卫星导航系统(GLONASS)之后第
三个成熟的卫星导航系统。
由此可见利用北斗对于无人机进行快速跟
踪的战略意义重大,相关研究也比较热门,我
们下面将对系统组成和技术难点展开论述。
1系统设计方案
基于北斗的无人机快速跟踪系统设计的建
设目标在于维护国家安全的大背景下利用北斗
的全天候导航优势解除目前市面上视频跟踪的
劣势以解决相应的技术瓶颈,实现全天候精准
快速目标跟踪。
系统由以下三个子系统组成: (1)北斗导
航系统,(2)快速跟踪系统,(3)接力跟踪
协同系统。下面分别阐述。
(1)北斗导航系统,由空间段、地面段
和用户段三部分组成,可在全球范围内全天
候、全天时为各类用户提供高精度、高可靠定
位、导航、授时服务,并具短报文通信能力,
已经初步具备区域导航、定位和授时能力,定
位精度10米,测速精度0.2米/秒,授时精度
基于北斗的无人机快速跟踪
系统设计
盘海玲 桂林长海发展有限责任公司 广西桂林 541004
10纳秒。在无人机上装备北斗导航系统,可以
实现在多雾、夜晚、跨区域等复杂场景下的实
时地理位置坐标的获得。
(2)快速跟踪系统,由位置传感器、信
号处理系统、伺服系统和跟踪架等部分组成。
自动跟踪系统依据传感器不同分类:利用电磁
波特性的,称为无线电跟踪系统;利用光波特
性的,称为光学(光电)跟踪系统。跟踪系统
应用在无人机上分为跟踪无人机和装备在无人
机上跟踪其他物体。
(3)接力跟踪协同系统,在实际的应用
中我们发现无人机由于飞行速度快,体积小,
在一些视频监控跟踪的过程中很容易跟丢,虽
然在系统中能获得的北斗的相关信息,但是由
于跟踪系统本身的物理技术特性无法实现,这
就萌生接力跟踪协调系统的开发需求。接力跟
踪协调系统的研发核心在于如何接力上,具体
实现可以在电子地图执行,依据已经完成电子
地图布点的快速跟踪系统在北斗的引导下,进
行任务分配,完成跟踪协同。
三个子系统的协同应用是由接力跟踪协同
系统作为通讯平台,北斗导航系统与快速跟踪
系统均推送相关数据汇总,再由指挥中心执行
相应指令来获得相应的结果。
2系统设计中几大技术难点及解决方
式
基于北斗导航技术无人机的快速跟踪研究
由于北斗的技术成熟本文不再累述,其应用方
式其主要区别是应用载体的不同,但是对于识
别和跟踪接力北斗将实现不可替代的作用。而
目前的技术难点主要基于两大应用方向即跟踪
无人机和无人机载跟踪系统,这两大应用场景
的不同也衍生出不同的技术难点,其主要解决
方式下面分别给以论述:
2.1快速跟踪无人机:
(1)小像素点的跟踪。由于无人机目标
小的特性,在地面或者其他飞行器上配备跟踪
系统跟踪无人机会发现存在像素小不易跟踪,
我们知道对于一般视频中的目标,有非常明显
的特征或边界,然而对于无人机视频中的一些
点目标来说,仅仅由一些像素组成,大小跟噪
声非常相似,因此检测跟踪一个小目标将比较
困难,这是因为大多数的算法是在理想的条件
下进行的,如相机静止、图像质量很好、目标
非常清晰、目标移动缓慢和简单的背景等。但
是无人机移动速度快,视频中的目标也可能移
动很快。因此,无人机视频中目标的分辨率比
较低,背景比较复杂,给视频处理带来了一定
的困难。
针对小目标实时高精度检测跟踪问题,有
学者提出一种基于正负正则化LOG算子的尺度
自适应小目标实时高精度检测跟踪方法。相关
实验显示,新方法在实时性、尺度 自适应性、
检测准确性以及抗噪声性上均有较好的表现。
(2)复杂背景的目标抽取。无人机目标
在复杂背景中运动时,变化的背景会在一定程
度上影响跟踪算法的稳定性和可靠性,所以应
尽量抑制背景。对于目标跟踪而言,目标中和
背景差异大的区域对于跟踪的有效性、稳定性
贡献较大。相关研究权值计算方法有效地抑制
了背景,并且权值计算结果符合人类直观感
受,在实际应用中有较好的效果。
2.2无人机载快速跟踪系统
无人机载跟踪系统,也可以理解为机载移
动目标实时图像跟踪系统,目前要实现的功能
要求还缺乏高效的计算方法来支撑,这是因为
本身无人机在运动状态,去跟踪运动的物体,
显示的视频源将会受到较大的干扰,根据空对
空跟踪和空对地跟踪的不同,无人机平台获取
的视频图像需要进行运动补偿预处理、运动目
标的检测、精确轮廓的提取和跟踪四个方面进
行分析研判工作。
其他方面,针对无人机拍摄平台获取的原
始视频受运动干扰较大、像机自身存在运动情
况下对运动目标进行检测跟踪问题,常用的一
类算法是先消除像机自身运动,然后再对目标
进行检测跟踪。针对像机运动消除问题有学者
提出了一种基于Gabor特征描述的像机自运动
消除方法。相关研究表明,新算法可以有效地
消除像机自身运动,检测出和像机存在相对运
动的目标。
3技术展望
无人机在许多领域具有广泛的应用前景,如
军事、民用、科学研究等。而光学跟踪系统结构
简单可靠、成本低、功耗少、体积小和重量轻、
隐蔽性好、角分辨率高和抗干扰性好;缺点是受
大气影响大,不能全天候工作。利用北斗技术实
现的无人机快速跟踪行业应用,是无人机真正的
刚需,相信会发挥巨大的社会效益。
【参考文献】
[1]谭熊,余旭初,刘景正,黄伟杰、 基于无
人机视频的运动目标快速跟踪 《测绘通
报》 2011
[2]张恒无人机平台运动目标检测与跟踪及
其视觉辅助着陆系统研究,国防科学技术
大学 博士论文, 2008
[3]李胜勇基于超小型无人机的地面运动
目标跟踪研究南京理工大学硕士论文
2014