最佳线性滤波器
16第十六讲匹配滤波
这种滤波器的传输函数除相乘因子Ke-jωt0外,与信号频谱 的复共轭相一致,所以称该滤波器为匹配滤波器。
从匹配滤波器传输函数H(ω)所满足的条件,我们也可以 得到匹配滤波器的单位冲激响应h(t):
h(t) 1 H ()e jt d 1 KS ()e jt0 e jtd
2
2
1
n(t)
H( )
y(t) t=t0
(
S N
)o
判决
输出
当选择的滤波器传输特性使输出信噪比达到最大值时,该滤 波器就称为输出信噪比最大的最佳线性滤波器。
设输出信噪比最大的最佳线性滤波器的传输函数为H(ω), 滤波 器输入信号与噪声的合成波为
r(t) s(t) n(t)
式中, s(t)为输入数字信号, 其频谱函数为S(ω)。 n(t)为高斯
比较器是在t=T时刻进行比较的。如果h1(t)支路的样 值大于h2(t)支路的样值,判为s1(t),否则判为s2(t)
S() s(t)e jtdt 1/ j 1 e jT /2
匹配滤波器的传输函数为
H (w) S (w)e jwt0
匹配滤波器的单位冲激响应为
1
j Tw
(e 2
jw
2
KS ()e d j(t0 t) K
2
s(
)e
j
d
e
j
(
t0
t
)
d
K
1
2
s(
)e
j d
e
d j (t0 t )
K
1
2
e
j
(
t0
t
)
d
s(
)d
K
s( ) (
t0
通信原理试题库填空题

通信原理试题库填空题通信原理试题库填空题1、通信是消息传递的全过程,即信息的传输与交换。
2、完成信息传递所需全部设备和传输媒的总和称为通信系统。
3、信道指信号传输的通道,按传输媒介可以分为有线和⽆线两类。
4、数字调制的⽬的是把各种数字基带信号转换成适应于数字传输的数字频带信号。
5、按通信⽅式不同,通信可以分为单⼯、半双⼯和双⼯通信。
6、信息是对消息的不确定性的定理描述。
7、频带利⽤率的单位有 Baud/Hz 和 Bit/s/Hz 。
8、信息量的单位当对数底为2时为⽐特,当对数底为10时为哈特,当对数底为e 时为奈特。
9、通信系统最主要的性能指标为有效性和可靠性。
10、设英⽂字母E 出现的概率为0.105,X 出现的概率为0.002。
则E 的信息量为 3.25bit ,⽽X 的信息量为 8.97bit 。
11、某信息源的符号集由A 、B 、C 、D 和E 组成,设每⼀符号独⽴出现,其出现概率分别为1/4,1/8,1/8,3/16和5/16。
则该信息源符号的平均信息量为 2.23bit/符号。
12、所谓误码率,是指错误接收的码元数在传送总码元数中所占的⽐例。
13、只有平稳随机过程才可能具有各态历经性。
14、在狭义的平稳随机过程中,其n 维的概率分布或n 维的概率密度函数与时间的起点⽆关。
15、⾼斯过程经过线性系统后的过程为⾼斯过程。
16、⾼斯过程的随机变量是⾼斯随机变量,其概率密度函数可表⽰为 222)(21)(σπσa x e x f --=。
17、凡是功率谱密度在整个频域内都是均匀分布的噪声,称为⽩噪声。
18、要衡量随机过程任意两个时刻上获得的随机变量的统计相关特性,常⽤协相关函数和相关函数来表⽰。
19、随机相位正弦波)sin()(0θξ+=t w t ,其中 0w 为常数,θ是在区间(0,2π)上均匀分布的随机变量。
则其⾃相关函数为:τ0cos 21w 20、随机相位正弦波)sin()(0θξ+=t w t ,其中 0w 为常数,θ是在区间(0,2π)上均匀分布的随机变量。
维纳滤波器 matlab实现
实验报告册数字图形图像处理维纳滤波器matlab实现学院:人民武装学院学院专业:计算机科学与技术班级: 11级计科班学号: 1120070544 学生姓名:苏靖指导教师:维纳滤波的原理及其matlab 实现,以案例的形式展示FIR 维纳滤波的特性。
2.维纳滤波概述维纳(Wiener )是用来解决从噪声中提取信号的一种过滤(或滤波)方法。
这种线性滤波问题,可以看做是一种估计问题或一种线性估计问题。
一个线性系统,如果它的单位样本响应为)(n h ,当输入一个随机信号)(n x ,且)()()(n v n s n x += (1) 其中)(n x 表示信号,)(n v )表示噪声,则输出)(n y 为∑-=mm n x m h n y )()()( (2)我们希望)(n x 通过线性系统)(n h 后得到的)(n y 尽量接近于)(n s ,因此称)(n y 为)(n s 的估计值,用^)(n s 表示,即^)()(n s n y = (3) 则维纳滤波器的输入—输出关系可用下面图1表示。
图1实际上,式(2)所示的卷积形式可以理解为从当前和过去的观察值)(n x ,)1(-n x ,)2(-n x …)(m n x -,…来估计信号的当前值^)(n s 。
因此,用)(n h 进行过滤问题实际上是一种统计估计问题。
一般地,从当前的和过去的观察值)(n x ,)1(-n x ,)2(-n x …估计当前的信号值^)()(n s n y =成为过滤或滤波;从过去的观察值,估计当前的或者将来的信号值)0)(()(^≥+=N N n s n y 称为外推或预测;从过去的观察值,估计过去的信号值)1)(()(^>-=N N n s n y 称为平滑或内插。
因此维纳滤波器又常常被称为最佳线性过滤与预测或线性最优估计。
这里所谓的最佳与最优是以最小均方误差为准则的。
如果我们分别以)(n s 与^)(n s 表示信号的真实值与估计值,而用)(n e 表示他们之间的误差,即)()()(^n s n s n e -= (4) 显然)(n e 可能是正值,也可能是负值,并且它是一个随机变量。
信噪比最大的最佳线性滤波器
信噪比最大的最佳线性滤波器⏹最佳线性滤波器的推导⏹最佳线性滤波器的性质102030405060708090100-0.500.511.50102030405060708090100-0.500.511.5高信噪比 低信噪比How to increase SNR?信噪比:输出端信号在t=t 0时的瞬时功率与噪声的平均功率之比 s t d E n t 200020()[()]h (t ) X (t )=s (t )+n (t )Y (t )=s 0(t )+n 0(t ) 确知信号 零均值平稳随机过程信噪比最大01()()()2j t s t H S e d ∞ω-∞=ωωωπ⎰2201[()]()()2n E n t H G d ∞-∞=ωωωπ⎰输出噪声功率为: 最大)]([)(200200t n E t s d =h (t ) X (t )=s (t )+n (t )Y (t )=s 0(t )+n 0(t ) 输出信号为:分析思路:利用许瓦兹不等式 222()()|()||()|A B d A d B d ∞∞∞-∞-∞-∞≤⎰⎰⎰ωωωωωωω()*()A cB ω=ω等号成立的条件 0202()()12()()j t n S H e d d G H d ∞ω-∞∞-∞ωωω=πωωω⎰⎰022()()()()12()()j t n n n S G H e d G G H d ∞ω-∞∞-∞ωωωωω=πωωω⎰⎰0**()()()()()/()j t n n A H G e cB cS G ωω=ωω=ω=ωω0)()()(*t j n e G S c H ωωωω-⋅=00202222()()()()12()()()()()()12()()j t n n n j t n n n S G H e d G d G H d S d G H e d G G H d ∞ω-∞∞-∞∞∞ω-∞-∞∞-∞ωωωωω=πωωωωωωωωω≤πωωω⎰⎰⎰⎰⎰21()2()n S d G ∞-∞ω=ωπω⎰2()12()n S d G ∞-∞ω=ωπω⎰0max d =2()12()n S d G ∞-∞ω=ωπω⎰0max d 0)()()(*t j n e G S c H ωωωω-⋅=最佳滤波器:最大输出信噪比:最佳滤波器:()()()n S H c G ωω=⋅ω(1)幅频特性: 0arg ()arg ()H S t ω=-ω-ω(2)相频特性: 0)()()(*t j n e G S c H ωωωω-⋅=抑制噪声,增强信号0)(arg )(arg t S H ωωω--=000[arg ()arg ()]()1()()()21()()21()()2j t j S S t t j t t s t S H e d S H e d S H e d ∞ω-∞∞ω-ω-ω+ω-∞∞ω--∞=ωωωπ=ωωωπ=ωωωπ⎰⎰⎰0arg ()arg ()H S t ω=-ω-ω(2)相频特性:✓抵消输入信号相角argS(ω)的作用; ✓输出信号s 0(t)的全部频率分量的相位在t=t 0时刻相同,达到了相位相同、幅度相加的目的。
最佳(MMSE)滤波

* c1 * c c= 2 ⋮ c* N
x1 ( n) x2 ( n) x( n) = ⋮ xN ( n)
注意和书(6.2.1)-(6.2.4)的比较 注意和书(6.2.1)-(6.2.4)的比较 (6.2.1)
最佳(MMSE)线性滤波 最佳(MMSE)线性滤波
最小均方误差估计 线性预测 MMSE滤波器设计 MMSE滤波器设计
随机信号作为滤波器的输入(p.107随机信号作为滤波器的输入(p.107-111)
传统滤波器:低通,高通,带通, 传统滤波器:低通,高通,带通, 带阻对信号的不同频率分量进 行取舍 传统滤波器在很多应用场合不 符合实际需要
例子:信道均衡器设计噪声 输入来自信道模型: 信道模型:
x ( n) = ∑ h( k ) y ( n − k ) + u ( n)
k =0 L −1
H(z)
输出
通过对接收信号不同时刻的线性组合,从x恢复出y 通过对接收信号不同时刻的线性组合, 恢复出y
N −1 k =0
ˆ y ( n) = ∑ c ( k ) x ( n − k )
最小均方误差准则
ˆ e( n ) = y ( n ) − y ( n )
5 4.5 |e|3 |e| |e|
2
期望信号
估计信号
4 3.5 3
实现最佳滤波的常用准 则:
p min E e(n)
2.5 |e|0.5 2 1.5 1 0.5
最小均方误差线性估计: 最小均方误差线性估计:
2 2 ˆ min E e(n) = E y ( n) − y (n)
雷达信号分析(第2章)信号分析基础

H (f ) = μ(f ) m
ϕ = −θ(f ) − 2πft
m
0
幅频特性:匹配滤波器对输入信号中较强的频率成分给予较大的加权,对
较弱的频率成分给予较小的加权,因此输入信号中幅度大的频率成分,输
出信号中该频率成分也大。
相频特性:匹配滤波器的相频特性与信号的相位谱互补(除常数相位和线性相 位之外)。不管输入信号有怎样复杂的非线性相位谱,经过匹配滤波器之后,这 种非线性相位都被补偿掉了,而输出信号中只留下了线性的相位谱。
雷达信号分析 Radar Signal Analysis
张劲东 南京航空航天大学 电子信息工程学院 信息与通信工程系 雷达探测与信号处理实验室
Email: zhangjd@
第2章 雷达信号分析基础
¾2.1 雷达信号的复数表示 ¾2.2 雷达信号的相关特性 ¾2.3 最佳线性滤波器
• 信号在传递过程中不可避免地要受到自然和人为的各种干 扰,信号检测的目的是用一种最优处理的方法,从干扰观察 中获得所传递的信息。
• 这种最优处理的方法,有以下主要的特点: (1)最优处理的标准可能是不同的,例如:最大信噪比,或
最小的判决损失; (2)信号处理的方式与结果、与干扰的形式有关,也与信号
m
0
三、匹配滤波器的频率特性
∫ H (f ) = ∞ μ*(t − t)e−j2πftdt
m
−∞
0
∫ = [ ∞ μ(t − t)e j2πftdt ]*
−∞
0
∫ = [ ∞ μ(t)e j2πf (t0−t)dt ]* −∞
= μ*(f )e−j2πft0
或 也可以写成
H (f ) = μ(f ) e−jθ(f )e−j2πft0 m
卡尔曼滤波器的优缺点
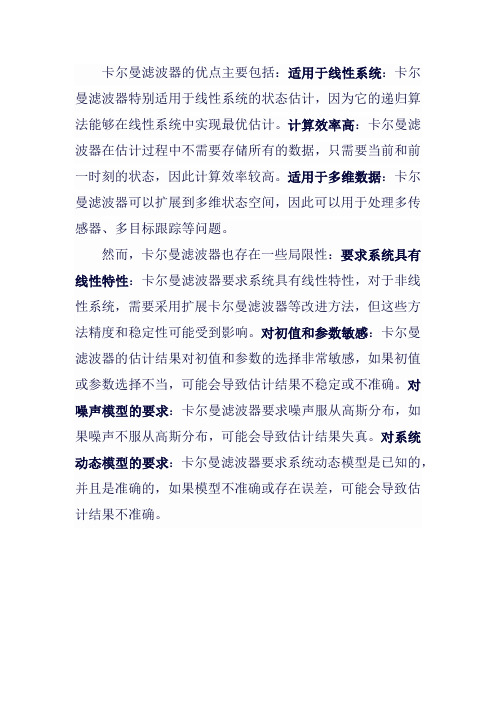
卡尔曼滤波器的优点主要包括:适用于线性系统:卡尔曼滤波器特别适用于线性系统的状态估计,因为它的递归算法能够在线性系统中实现最优估计。
计算效率高:卡尔曼滤波器在估计过程中不需要存储所有的数据,只需要当前和前一时刻的状态,因此计算效率较高。
适用于多维数据:卡尔曼滤波器可以扩展到多维状态空间,因此可以用于处理多传感器、多目标跟踪等问题。
然而,卡尔曼滤波器也存在一些局限性:要求系统具有线性特性:卡尔曼滤波器要求系统具有线性特性,对于非线性系统,需要采用扩展卡尔曼滤波器等改进方法,但这些方法精度和稳定性可能受到影响。
对初值和参数敏感:卡尔曼滤波器的估计结果对初值和参数的选择非常敏感,如果初值或参数选择不当,可能会导致估计结果不稳定或不准确。
对噪声模型的要求:卡尔曼滤波器要求噪声服从高斯分布,如果噪声不服从高斯分布,可能会导致估计结果失真。
对系统动态模型的要求:卡尔曼滤波器要求系统动态模型是已知的,并且是准确的,如果模型不准确或存在误差,可能会导致估计结果不准确。
(完整版)通信原理试题库填空题
通信原理试题库填空题1、通信是消息传递的全过程,即 信息 的传输与交换。
2、完成信息传递所需全部设备和传输媒的总和称为 通信系统 。
3、信道指信号传输的通道,按传输媒介可以分为 有线 和 无线 两类。
4、数字调制的目的是 把各种数字基带信号转换成适应于数字传输的数字频带信号。
5、按通信方式不同,通信可以分为单工、半双工 和 双工 通信。
6、信息是对消息的 不确定性的 定理描述。
7、频带利用率的单位有 Baud/Hz 和 Bit/s/Hz 。
8、信息量的单位当对数底为2时为比特,当对数底为10时为 哈特 ,当对数底为e 时为 奈特 。
9、通信系统最主要的性能指标为 有效性 和 可靠性 。
10、设英文字母E 出现的概率为0.105,X 出现的概率为0.002。
则E 的信息量为3.25bit ,而X 的信息量为 8.97bit 。
11、某信息源的符号集由A 、B 、C 、D 和E 组成,设每一符号独立出现,其出现概率分别为1/4,1/8,1/8,3/16和5/16。
则该信息源符号的平均信息量为 2.23bit/符号。
12、所谓误码率,是指 错误接收的码元数在传送总码元数中所占的比例。
13、只有 平稳随机过程 才可能具有各态历经性。
14、 在狭义的平稳随机过程中,其n 维的概率分布或n 维的概率密度函数与 时间的起点 无关。
15、高斯过程经过线性系统后的过程为 高斯过程 。
16、高斯过程的随机变量是高斯随机变量,其概率密度函数可表示为。
222)(21)(σπσa x ex f --=17、凡是功率谱密度在整个频域内都是均匀分布的噪声,称为 白噪声 。
18、要衡量随机过程任意两个时刻上获得的随机变量的统计相关特性,常用 协相关函数和相关函数 来表示。
19、随机相位正弦波,其中为常数,是在区间(0,2)上均)sin()(0θξ+=t w t 0w θπ匀分布的随机变量。
则其自相关函数为:τ0cos 21w 20、随机相位正弦波,其中 为常数,是在区间(0,2)上均)sin()(0θξ+=t w t 0w θπ匀分布的随机变量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
, Rxs ( N 1)
T
T
Toeplitz 对称阵
Rx ( N 1) Rx ( N 2) Rx ( N 3) Rx (0) N N
Rx (1) Rx (2) Rx (0) R (1) Rx (0) Rx (1) x Rx (2) Rx (1) Rx (0) Rx ( N 1) Rx ( N 2) Rx ( N 3)
Z Z 1
H opt ( z )
10. FIR型Wiener滤波器
x ( n)
z
1
x(n 1)
z
h1
1
x(n N 2)
… … …
z
1
x(n N 1)
h0
hN 2
hN 1
+
+
+
+
e(n)
ˆ(n) y(n) s
ห้องสมุดไป่ตู้
s ( n)
有限单位脉冲响应序列:h= h(0), h(1),
E[s (n) x (n)] R -1 x(n) E[ s(n) x (n)] E[ x(n) x (n)]1 x(n)
ˆ(n)是s(n)在信号空间X (n) {x(n), x(n -1), x( N 1)}上的正交投影。 s
Rs (m) 0.8|m| , m 0, 1, 例:设信号s(n)的自相关序列为: x(n) s(n) v(n) ,试中v(n) 是方差为0.45的零 观测信号为: 均值白噪声,它与s(n)统计独立。设计一个长为N=3的FIR 滤波器来处理x(n),使得其输出与s(n)的差的均方值最小。
Wiener Hopf 方程的矩阵形式: P h R 或 P RT h Rh
T T
滤波器单位脉冲响应的最优解: hopt R -1 P
滤波器输出: ˆ( n ) h y (n) s
T opt T
x(n) P (R -1 )T x(n)
T T T
ˆ(n) h(n) x(n) 输出序列:y(n) s x(n) h(n) h(i) x(n i )
i
设计目的:获得系统的单位脉冲响应h(n),或传输函数H ( z)。
设计准则:最小均方误差准则,即 ˆ(n))2 ] Min (n) E[e2 (n)] E[(s(n) s
, h( N 1)
T
输入时间序列(与h(n)等长): x(n) x(n), x(n 1),
, x(n N 1)
T
x(n)与s(n)的互相关函数(P为列矢量): P E x(n)s (n) Rxs (0), Rxs (1),
输入数据时间序列x(n)的自相关矩阵: R E x ( n) x ( n)
FIR:h(n), n [0, N -1]; ; 因果IIR:h(n), n [0, ) 非因果IIR:h(n), n (-, )。
LTI 滤波器的类型:
由信号正交性理解最优设计准则: ˆ(n)+e(n( s (n)=s ) 正交分解定理) ˆ( n ) e( n ) s ˆ(n)= h(i) x(n i ),故 而s
i
e(n) x(n i ) i, 或 E[e(n) x(n i)] 0 i (正交方程)
第三章 最佳线性滤波器
最佳线性滤波概述
Wiener-Hopf方程及其求解
Wiener滤波的性能 互补Wiener滤波器设计 卡尔曼滤波器的递推算法 卡尔曼滤波器的应用
由正交方程 Wiener Hopf 方程: E[e( n) x( n m)] 0 m E[( s( n) h(i) x( n i)) x( n m)] E[ s( n) x( n m)] h(i) E[ x(n i ) x(n m)] Rsx (m) h(i) Rx (m i ) 0
解:
x(n) [ x(n) x(n 1) x(n 2)]T
最佳线性滤波概述
最优估计: 在许多实际问题中,需要研究随时间变化的随机变量或随机
矢量的估计问题,即:按照某种最优准则对随时间变化的随
机变量或随机矢量作出估计。 ——在信息与通信工程领域常称为“波形估计”;
——在控制科学与工程领域常称为“状态估计”。
最佳滤波: 信号s(n)在传输时引入加性噪声v(n),接收信号x(n) s(n) v(n), ˆ(n)恢复s(n)。 希望经最佳滤波器滤波后的输出y(n) s
最优准则:
包括最大后验准则、最大似然准则、均方准则、线性均方准 则等。最佳线性滤波器采用线性均方准则,通常称为“最小 均方误差(LMS)”和“最小二乘(LS)”准则。统计均 方意义下的准则,要求输入为随机过程(序列),通常假定 “平稳”和“各态历经”。
最佳线性滤波器的主要应用场景: 10 . 过滤:用n时刻及以前的输入数据估计n时刻的信号值, 对应为因果IIR; 20 . 平滑:用过去、n时刻及未来的全部输入数据估计 n时刻的信号值,对应为非因果IIR; 30 . 预测:用n时刻及以前的共p个输入数据预测未来某时刻 的信号值,对应为FIR;
i i i
Rxs (m) h(i ) Rx (m i ) 0 m ——Wiener Hopf 方程
i
Rxs (m)—输入x (n )与信号s (n)的互相关函数; Rx (m)—输入x (n)的自相关函数。
Wiener Hopf 方程的求解: 求解的目的是得到最优的单位脉冲响应hopt (n)或系统传输函数H opt ( z ) hopt (n)
最佳线性滤波器结构
x ( n)
LTI(h(n))
ˆ(n) y(n) s
d (n) s(n)
+
ˆ(n) e(n) d (n) y(n) s(n) s
s (n)为源信号,是获取的对象; 输入序列:x(n) s (n) v(n)—— 2 v ( n ) ~ N (0, v )为加性噪声。