基于三维点云模型的人体头部尺寸测量系统
基于三维点云数据的人体目标检测技术研究

基于三维点云数据的人体目标检测技术研究引言随着计算机视觉和传感器技术的不断发展,三维点云数据成为了现实世界的重要数字表示形式。
对于人体目标检测,传统的图像数据在一些特定场景下存在着诸多局限性,例如光照、遮挡等。
而三维点云数据能够更准确地描述物体的空间几何结构,因此越来越受到研究者们的关注。
本文将深入探讨基于三维点云数据的人体目标检测技术研究。
一、三维点云数据概述三维点云数据是一种由大量点组成的集合,每个点都包含了三维空间中的坐标信息。
这些点通常是通过激光雷达、双目摄像头或者深度相机等传感器获得的。
三维点云数据具有直观、精确和丰富的信息,能够准确表达物体的空间结构和形态。
因此在目标检测、场景分割等任务中,三维点云数据展现出了巨大的应用潜力。
二、三维点云数据的人体目标检测人体目标检测是计算机视觉领域的一个重要问题,对于安防监控、智能交通、人机交互等领域具有重要意义。
在人体目标检测领域,基于图像的方法已经取得了不俗的成果。
由于受到光照、姿态、遮挡等因素的影响,图像数据在某些情况下存在着较大的局限性。
相比之下,三维点云数据可以更加准确地描述物体的形状和结构,因此成为了人体目标检测的新的研究热点。
1. 基于点云的人体特征提取在进行人体目标检测之前,首先需要对三维点云数据进行特征提取。
人体的关键特征包括头部、肢体等局部特征。
研究者们通过设计各种特征描述子,如形状特征、颜色特征等,来对三维点云数据进行特征提取和描述。
也可以借助深度学习技术来学习三维点云数据的表示,提取人体的关键特征。
通过这些特征描述子,可以更加准确地表征人体目标,为后续的检测和识别提供有力支持。
2. 基于深度学习的人体目标检测近年来,深度学习技术在计算机视觉领域取得了巨大的成功。
借助深度学习技术,研究者们提出了一系列基于三维点云数据的人体目标检测方法。
通过构建深度神经网络模型,可以直接输入原始的三维点云数据,进行端到端的目标检测和识别。
也可以通过将三维点云数据转换为二维图像,再利用图像领域的成熟技术来进行目标检测,最后将结果映射回三维空间。
基于三维点云数据的人体目标检测技术研究

基于三维点云数据的人体目标检测技术研究随着三维激光扫描技术的发展,三维点云数据的获取变得越来越容易。
同时,随着计算机硬件性能的提高,对于大规模点云的处理也有了更高的效率。
这些使得基于三维点云数据的人体目标检测技术成为了一个备受关注的研究领域。
一般来说,基于三维点云数据的人体目标检测可以分为以下几个步骤:1. 数据预处理在进行目标检测之前,需要对三维点云数据进行预处理,以提高后续处理的效率和准确度。
其中的一些常见预处理方法包括点云滤波、点云分割和点云配准等。
2. 特征提取点云数据通常需要进行特征提取才能被用于目标检测。
这是因为点云数据本身缺乏像像素数据那样的显著的特征信息。
其中常用的点云特征提取算法包括基于几何特征的算法和基于深度学习的算法。
3. 目标检测目标检测一般被分为两个步骤:先进行目标候选框提取,然后对每个候选框进行分类以确定其是否为人体目标。
基于三维点云数据的目标候选框提取通常是通过分割点云来实现的。
随后,可以将每个候选框中的点作为输入,通过深度学习模型进行分类判断。
4. 后处理在目标检测完成后,还需要进行后处理以进一步提高检测结果的准确性。
其中常用的后处理方法包括非极大值抑制和联合优化等。
当前,在基于三维点云数据的人体目标检测领域,有许多相关研究正在进行。
例如,某些研究利用卷积神经网络在点云数据上进行特征提取和分类,以实现人体目标的检测。
另外,一些研究利用图像数据中的信息来辅助三维点云数据的处理,以进一步提高检测精度。
总之,基于三维点云数据的人体目标检测技术的研究正在成为人们关注的热点领域。
虽然在处理和分析三维点云数据方面仍存在一些技术难题,但这些挑战同时也为该研究领域提供了更多的机遇和挑战。
基于三维点云数据的人体目标检测技术研究
基于三维点云数据的人体目标检测技术研究1. 引言1.1 研究背景研究发现,三维点云数据具有丰富的信息量,可以提供目标的立体信息和空间结构,能够有效克服传统图像数据的局限性。
基于三维点云数据的人体目标检测技术逐渐成为研究热点。
通过对三维点云数据进行处理和分析,可以实现对人体目标的快速准确检测和定位,有望在安防监控、智能交通、人机交互等领域得到广泛应用。
目前关于基于三维点云数据的人体目标检测技术研究还比较有限,存在许多挑战和问题需要解决。
本研究旨在探索基于三维点云数据的人体目标检测技术,为提高目标检测的精度和效率提供新的思路和方法。
也有望为推动人体目标检测技术在实际应用中的进一步发展做出贡献。
1.2 研究意义人体目标检测技术是计算机视觉领域中的重要研究方向,随着三维点云数据的广泛应用,基于三维点云数据的人体目标检测技术也备受关注。
研究人体目标检测技术的意义在于提高安全性和效率,推动生产力的发展。
通过实时检测人体目标,可以帮助监控系统更快速地发现异常行为,提高安全防范能力;在自动驾驶、智能机器人等领域,人体目标检测技术的应用也能够提高系统的智能化水平,提升用户体验。
2. 正文2.1 三维点云数据的特点三维点云数据是指由大量点构成的空间数据集合,每个点包含了三维坐标信息和可能的属性信息。
与传统的图像数据不同,三维点云数据具有以下几个显著的特点:1. 丰富的信息量:三维点云数据不仅包含了物体的形状和位置信息,还可以包含颜色、纹理、密度等属性信息,能够提供更加全面和丰富的信息。
2. 高维度的数据表示:每个点都包含了多个维度的信息,包括三维空间坐标和可能的属性信息,使得三维点云数据的维度较高,处理起来更加复杂。
3. 不规则和稀疏性:点云数据的分布通常是不规则的,点与点之间的距离和密度可能不一致,同时点云数据通常是稀疏的,即数据点并不是均匀分布的。
4. 无序性和无连续性:三维点云数据中的点是无序的,没有固定的排列顺序,且不像图像数据那样具有明显的连续性,这给数据处理和分析带来了挑战。
基于三维点云数据的人体目标检测技术研究
基于三维点云数据的人体目标检测技术研究一、引言随着计算机视觉和深度学习技术的发展,人体目标检测技术在智能监控、无人驾驶、人体姿态分析等领域得到了广泛的应用。
在传统的图像数据中,人体目标检测技术已经取得了很大的进展,但是在复杂环境下检测精度仍有待提升。
而基于三维点云数据的人体目标检测技术可以在不同角度和距离下获取更为丰富的信息,可以有效解决传统方法的局限性,因此成为了当前研究的热点之一。
二、三维点云数据的特点三维点云数据是在三维空间中对对象表面进行采样的数据,它能够包含更多的立体信息,具有更强的鲁棒性和更丰富的描述能力。
相比于传统的二维图像数据,三维点云数据能够更加真实地去描述物体的形状和位置。
而在人体目标检测中,三维点云数据能够提供更为准确的立体信息,可以更好地识别目标物体的边缘和形状,因此可以提高目标检测的准确性和鲁棒性,尤其是在复杂背景和光照条件下。
三、相关技术1.三维点云数据的获取技术为了实现基于三维点云数据的人体目标检测,首先需要有效地获取三维点云数据。
目前常用的获取方式包括激光雷达扫描、双目视觉和三维摄像头等。
激光雷达扫描是一种常用的三维点云数据获取方式,可以通过激光束的扫描获取物体表面的三维坐标信息。
双目视觉和三维摄像头则可以通过两个或者多个摄像头同时获取物体的深度信息,从而得到三维点云数据。
这些获取技术能够有效地获取三维点云数据,为后续的目标检测提供了基础数据。
2.三维点云数据的处理技术三维点云数据的处理是基于三维点云数据进行目标检测的关键步骤,其主要包括点云预处理、点云特征提取和点云分割等。
点云预处理主要包括数据去噪、数据滤波和数据对齐等步骤,通过这些处理可以清晰地看到目标在点云中的位置和形状。
点云特征提取则是为了获取更为丰富的信息,如表面法线、曲率和颜色等,从而更好地描述目标物体的特征。
点云分割是指将点云数据中的不同目标物体进行分割,以便更好地进行识别和检测。
3.三维点云数据的人体目标检测技术基于三维点云数据的人体目标检测技术主要包括人体特征提取和目标检测两个关键步骤。
【精品专业论文】机械电子工业,基于点云数据的人体头发的三维重建

分类号:TP391 单位代码:10183 研究生学号:2007412153 密级:公开吉林大学硕士学位论文基于点云数据的人体头发的三维重建Three-dimensional Reconstruction of Human HairBased on Point Cloud Data作者姓名:刘超专业:机械制造及其自动化研究方向:逆向工程指导教师:王龙山教授程晓民教授培养单位:机械科学与工程学院2009年5月基于点云数据的人体头发的三维重建Three-dimensional Reconstruction of Human Hair Based on Point Cloud Data作者姓名:刘超专业名称:机械制造及其自动化指导教师:王龙山教授程晓民教授学位类别:工学硕士答辩日期:2009年月日未经本论文作者的书面授权,依法收存和保管本论文书面版本、电子版本的任何单位和个人,均不得对本论文的全部或部分内容进行任何形式的复制、修改、发行、出租、改编等有碍作者著作权的商业性使用(但纯学术性使用不在此限)。
否则,应承担侵权的法律责任。
吉林大学博士(或硕士)学位论文原创性声明本人郑重声明:所呈交学位论文,是本人在指导教师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
学位论文作者签名:日期:年月日《中国优秀博硕士学位论文全文数据库》投稿声明研究生院:本人同意《中国优秀博硕士学位论文全文数据库》出版章程的内容,愿意将本人的学位论文委托研究生院向中国学术期刊(光盘版)电子杂志社的《中国优秀博硕士学位论文全文数据库》投稿,希望《中国优秀博硕士学位论文全文数据库》给予出版,并同意在《中国博硕士学位论文评价数据库》和CNKI系列数据库中使用,同意按章程规定享受相关权益。
基于三维点云数据的人体目标检测技术研究
基于三维点云数据的人体目标检测技术研究随着人工智能技术的不断发展,人体目标检测技术在各个领域得到了广泛应用,其中基于三维点云数据的人体目标检测技术成为了当前研究的热点之一。
本文将围绕这一主题展开探讨,首先对基于三维点云数据的人体目标检测技术进行介绍,然后分析目前存在的问题和挑战,最后探讨未来的发展方向和趋势。
基于三维点云数据的人体目标检测技术是指利用三维点云数据来检测并识别人体目标的技术。
三维点云数据是指通过激光雷达、摄像头等设备采集到的空间中的点云数据,可以以三维坐标的形式来表示目标物体的形状。
与传统的图像数据相比,三维点云数据包含了更加丰富的几何信息,具有更高的维度和精度,可以更好地表征目标物体的空间结构和形状特征。
目前,基于三维点云数据的人体目标检测技术主要分为两种方法:基于点云的方法和基于深度学习的方法。
基于点云的方法通常采用传统的几何特征提取和模式识别算法,如边缘检测、特征点提取、表面重建等,以实现对点云数据的处理和分析。
而基于深度学习的方法则利用深度神经网络来学习和提取点云数据中的特征信息,实现对人体目标的检测和识别。
尽管基于三维点云数据的人体目标检测技术具有许多优势,但在实际应用中仍然存在一些挑战和问题,例如数据稀疏性、噪声干扰、遮挡问题等。
三维点云数据通常具有数据稀疏性的特点,即采集到的点云数据中存在大量的空白区域和缺失数据,这给人体目标的检测和识别带来了一定的困难。
由于激光雷达或摄像头等设备采集到的数据可能受到噪声干扰和环境干扰,导致点云数据的质量不高,影响了目标的检测和识别效果。
当人体目标被其他物体或障碍物遮挡时,其在点云数据中的表现可能会变得模糊不清,难以准确地进行目标检测和识别。
为了克服上述挑战和问题,基于三维点云数据的人体目标检测技术在未来的发展中可能会朝着以下方向进行探索和改进:1. 提升数据质量和稳定性。
通过改进激光雷达、摄像头等设备的传感器技术,提高点云数据的采集质量和稳定性,减少数据的稀疏性和噪声干扰,提高目标的检测和识别精度。
三维扫描仪人体点云数据建模探讨

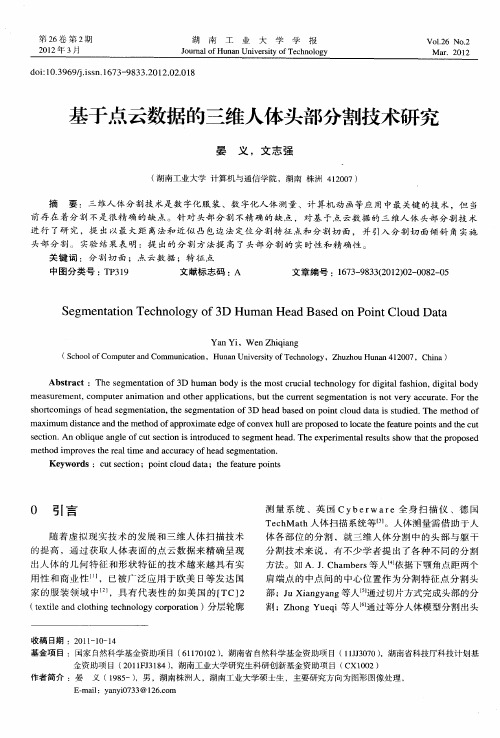
⑶ 扫描仪所获取的人体表面数据是以文本(.txt)格式存储的。人体数据 分为六个部分,即肩头部、躯干、左右臂、左右腿。
数据点云
人体截面示意图
点云预处理概述及点云的分类
点云(Point Cloud):通常是指由坐标测量机和激光扫描仪所测得的实物
三维空间点集。最小的点云只包含一个点,而高密度点云则可达几百万
提取方法:
(1)根据服装学和人体测量学定义,分析尺寸和特征点的 几何特征。 (2)从三角片人体模型中寻找特征点,或者在直线或平面 与人体模型的交线上搜索特征点,找到特征点的位置。 (3)通过与人体模型求交或者直接连线而得到尺寸信息, 人台特征尺寸的提取包括颈围、胸围、 腰围。
人体关键特征点
例如:胸围尺寸提取
胸围:在胸围高度附近的最大水平围度。
具体提取方法:
(1)估计胸围所在人体模型高度区域 H1、H2,并且 H1<H2,比较该 区域[H1,H2]内所有前后方向 Z 坐标值,找到人体中心左右两侧两个最 大值 LZmax、RZmax,最大值对应的那两个点即为左、右胸高点。 (2)当左右胸高点的高度坐标不一样时(如 LZ≠RZ) 可以取平均值, 然后修改胸高点的高度坐标。
缺点:不可避免地会丢失人体扫描数据的一些细节信息。 实践证明:基于线架的服装人台曲面模型在人台模型表示的准确性,建模效率以及
三维人台模型的可控性之间找到了一个很好的平衡。目前该方法已经移植到用户 的三维服装CAD系统中,开始应用。
三维人体扫描生成服装样板
无序点云 人体 提取人体特征 三角化 人体mesh模型 人体聚类分割 聚类区域 多边形展开 多边形回归
曲面填充和拼接
具体方法:以能量模型为优化目标函数,以4条边界B样条曲线作为约
基于点云数据的三维人体头部分割技术研究
m e s e e t o p t ra i a i nd o h ra p i a i s bu h u r n e m e tton i o e y a c r t . rt e a ur m n ,c m u e n m ton a t e p lc ton , tt ec re ts g n ai Sn tv r c u a e Fo h
中图分类号 : P 1 T 39 文献标志码 : A 文章编号 :17 — 8 32 1)2 0 8 — 5 6 3 9 3 (0 20 — 0 2 0
S g e tto c n l g f3 Hu a a s do i o aa e m n ai n Te h o o y o D m n He dBa e n Pont Cl udD t
0 引 言
随 着虚 拟 现实 技 术 的发 展 和三维 人 体 扫描 技术 的提 高 ,通过 获 取 人体 表 面 的点 云数据 来 精确 呈 现 出人体 的几 何特 征 和形 状 特征 的技 术 越来 越具 有 实 用 性 和 商业 性 …, 已被广 泛 应用 于 欧美 日等发 达 国 家 的服 装 领域 中 ] ,具 有 代表 性 的如 美 国的 [ TC】 2
Ya ,W e i i n nYi nZh q a g
( c o l fCo ue n Sho o mp tra dCo mmu iain,Hu a nc t o n nUnv ri f c n lg ie st o Te h oo y,Zh z o y u h uHu a 1 0 7,Ch n n n4 2 0 ia)
s orc m i g fh a e m e tto t es g e tto f3 h a a e n p i tco t ssu i d Them eh f h t o n so e d s g n ai n, h e m n ai n o D e d b s d o o n l uddaai t d e . t od o m a i u itn ea dt emeho fa p o i aee g f o v xh l r r p s dt c t ef au ep it n h u xm m d sa c n t do p r x m t d eo n e ula ep o o e l aet e tr on sa dt ec t h c oo h
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于三维点云模型的人体头部尺寸测量系统【摘要】提出了一种基于三维点云模型的人体头部尺寸自动测量方法,并设计与实现了人体头部尺寸测量系统。
该系统采用基于几何特征分析的方法来识别头部测点,并根据测点计算头部的各项尺寸。
实验证表明,系统具有测量速度快、精度高的特点。
目前已成功应用于头盔和面罩等产品的设计中。
【关键词】人体测量学;点云模型;测点识别;头部尺寸1.引言人体测量学[1]是人机工程学的一个重要分支领域,通过测量人体各部位的尺寸,运用统计学的方法,对人体形态特征进行研究。
头部测量是人体测量学的重要组成部分,对头盔、防毒面具、防护目镜、通讯耳机等头部相关装备的制造具有重要意义。
传统的头面部装备设计主要参考头宽、头长两项分离的一维指标,由于这两项一维指标仅反映了头颅的一维尺寸大小,而无法反映三维曲面形状,所以据此设计的头面部装备往往只能按大小分号而不能按形状分型,而且与头颅的贴合度较差。
随着三维扫描技术的发展,通过扫描仪获取头部三维模型,运用头面部的整个形态信息进行头面部装备的设计已获得广泛关注。
从点云模型中提取头部尺寸的难点在于如何鲁棒准确地提供识别头部测点。
国内外学者已经提出了多种在头部点云模型中提取测点的方法,主要分为如下两类:(1)基于几何特征分析的方法[2-4]:此类方法根据测点附近的几何特征(如高斯曲率、平均曲率、局部极值、最值等)和测点之间的结构关系等来提取测点。
对无明显特征的测点,则借助统计规律和人体比例特征获得其大致位置,再由用户交互式编辑得到其精确位置;(2)基于模板网格变形的方法:基于模板网格的形状处理技术近年来得到了计算机图形学领域的重视[5-6],此方法的核心步骤是:对于待处理的头部模型,将一个已经标注测点的头部模板网格变形到待处理模型,生成一个几何上与待处理模型在允许误差范围内、拓扑上和模板网格一致的网格,变形后的模板网格上的测点即为待识别的测点。
基于几何特征的识别方法实现比较复杂,但算法效率高,而且识别结果比较准确;而基于模板网格变形的识别方法则鲁棒性好,但算法效率不高,而且部分测点识别精度低。
本文以头盔和面罩等产品的设计为背景,针对三维头部点云模型数据,采用基于几何特征的测点识别方法,设计和实现了一个头部尺寸自动测量系统。
2.技术要求本文以头盔和面罩设计为背景,依据《GJB 4856-2003 中国男性飞行员人体尺寸》[7],共提取人体头部50尺寸测量项目,完成三维头部尺寸测量。
2.1 测点和测量项目测量项目是指在相应的测量姿势上,根据测点给出的人体水平尺寸(包括围度尺寸)、垂直尺寸或其他尺寸,例如头最大长、头最大宽、头围等。
测点是用于表示测量位置的界点,它通常为肌肉下方的骨骼突出部位或者关节连接处[7],例如耳屏点、眶下点、枕后点等。
测量项目一般由一个或多个测点进行定义,例如“头围”的相关测点为“眉间点”和“枕后点”。
测点和测量项目的定义参见《GJB 4856-2003》[7],图1给出了测量项目“头围”的示意图及相关测点。
图1 “头围”及相关测点示意图2.2 头部解剖学坐标系本文中的三维头部模型采用头部解剖学坐标系[8],如图2所示。
该坐标以左耳屏点、右耳屏点和左眶下点定义的平面为水平面(XOY平面),左、右耳屏点的中点为坐标原点O,垂直此平面的轴为Z轴(向上为正向),Y轴为右耳屏点与左耳屏点的连线(向左为正向),X、Y、Z轴满足右手关系(向前为正向)。
图2 头部解剖学坐标图3 系统测量流程图3.尺寸测量流程与关键技术3.1 尺寸测量流程系统测量流程如图3所示。
首先读入人体点云数据,对其进行预处理,去除噪声点并建立头部解剖学坐标系;其次,采用基于几何特征分析的方法自动识别头部的35个测点,并经过人工确认。
如果不满意,则通过交互式调整测点位置;最后计算人体头部50个测量项目并输出测量结果。
3.2 预处理首先,由于遮挡等原因,目标模型中往往含有噪声、空洞,同时模型的边界也不规整,需要用Geomagic等软件中对模型进行去噪、补洞、边界修补等规则化处理。
其次,由于头部模型往往处在不同的坐标系下,这不利于后续的数据处理,因此需要将所有的头部点云模型转换到头部解剖学坐标系下。
该坐标系根据左耳屏点、右耳屏点和左眶下点来定义,如果此三点已知,通过三维平移和旋转变换即可完成坐标变换。
可通过贴标记点并进行识别得到此三点;或者通过交互拾取的方法,让用户在头部模型上拾取此三点。
3.3 测点识别测点自动识别问题是头部尺寸自动测量中的一个经典问题,也是尺寸自动测量的难点。
本系统采用基于几何特征分析的识别方法,并结合人体各部分的比例关系和测点之间的约束关系来进行测点自动识别。
根据《GJB 4856-2003》,50个测量项目共涉及35个测点。
根据测点在人体头部上的位置和相关特征,可以将测点分为四类:(1)第一类为最值点。
这类测点又可以分为局部最值点和全局最值点两类,局部最值点具有局部区域内的沿某一坐标轴方向的最值。
而全局最值点在整个头部模型上具有沿某一坐标方向上的最大值或者最小值,例如头顶点、枕后点、耳外点、鼻尖点等;(2)第二类是局部极值点。
这类测点或者位于轮廓线上,属于轮廓线上的凸点、凹点或者突变点,如鼻梁点、颏下点等;(3)第三类为约束测点。
此类测点由其它测点定义,可以根据其它测点计算出来,例如,枕后点即可根据眉间点进行计算(枕后点为在正中矢状面上,枕部离眉间点最远的点)。
(4)第四类为一般测点。
这类测点在其附近区域无明显几何特征,只能通过头部比例关系等来进行估算。
在进行测点识别时,最值点是最容易识别的,其次是轮廓线上的局部极限点,接着是位于区域上的局部极值点和约束测点,最后是一般测点。
因而在测点自动提取时,也遵循这样一个顺序:首先根据测点的定义提取位于头部上的最值点;然后借助轮廓提取和分析的方法,对人体头部有价值的轮廓线上的测点进行识别;之后,根据区域上待识别测点与已识别的测点的关系,识别区域上的局部极值点;最后对无明显特征的一般测点,借助统计学和人体比例学特征获得其大致位置,或者根据其与已经识别出来的测点的关系获得其初始位置,再由用户交互式编辑得到其精确位置。
(1)最值点识别:测点识别在预处理后的模型上进行,预处理后的模型已经位于解剖学坐标系下。
在此坐标系下最值点在局部范围上或者全局范围上具有沿某一坐标方向上的最大值或者最小值。
例如,头顶点是铅垂轴方向上具有最大值的点,枕后点和鼻尖点分别是头部中部区域上沿纵轴方向的最小值和最大值点,左、右耳外点分别是头部中部区域上沿横轴方向的最小值和最大值点。
对最值点的识别比较简单,通过查找模型上某一坐标轴方向的最值即可得到待识别测点。
(2)局部极值点识别:轮廓线可以表达人体头面部的细节结构。
正中矢状面轮廓线是人体头部最有价值的轮廓线,有相当一部分测点位于该轮廓线上,包括眉间点、鼻梁点、鼻尖点、鼻下点、上唇中点、口裂点、下唇中点、龈点、颏上点、颏前点、颏下点、喉结点、后头顶点、枕外隆突点等。
除侧面轮廓线之外,水平轮廓线上也存在部分测点,比如左、右鼻翼点,耳下附着点。
对位于轮廓线上的局部极值点,首先提取测点所在的轮廓线,然后借助轮廓分析的方法提取轮廓线上的候选点集,最后根据待识别测点的语义特征在候选点集中查找待识别测点。
(3)约束测点识别:此类测点由其它测点定义,可以根据其它测点通过截面轮廓线计算出来。
包括枕后点(枕后点定义在正中矢状面上,枕部离眉间点最远的点)、后头顶点(在正中矢状面上,头顶点后,头顶部离颏下点最远的点)等。
(4)一般测点识别:人体头部上也存在着一小部分测点(如左、右颧点以及左、右颞嵴点),它们既不具备在某个坐标轴上具有最值,又不位于有价值的轮廓线上,同时也不位于特定的面部区域上,因而前面两小节所述的识别算法对其失效。
对这类不具备明显几何特征的一般测点,可以借助人体面貌形态学特征,首先确定这类测点在人体头部上的比例关系;然后根据头部包围盒的边界点以及测点所对应的比例关系计算测点的初始粗略位置;最后给定一个阈值,在模型上查找与初始识别点的距离落在阈值内的所有点,取点集的中心作为一般点的最后识别位置。
3.4 尺寸计算本系统中需要计算的尺寸测量项目共50项,包括《GJB 4856-2003:中国男性飞行员人体尺寸》中定义的B.1.1~B.1.50。
一个测量项目由1个或一个以上的测点进行定义。
根据不同测量项目在计算方法上的差异,将测量项目划分为五类:1)两点间垂直距离:包括B.1.3~B.1.5等3项;2)两点直线距离:包括B.1.1、B.1.2、B.1.6~B.1.36等33项;3)两点水平距离:包括B.1.37~B.1.39眼突枕突距等3项;4)围长:包括B.1.40~B.1.43等4项;5)弧长:包括B.1.44~B.1.50等7项。
(1)距离类尺寸计算:此类尺寸测量项目通常定义为两个相关测点的垂直高度、水平距离或直线距离。
因此,一旦头部测点被识别出来以后,距离类测量项目的求解就相对比较容易了。
设与测量项目定义相关的测点为和,则垂直距离=,水平距离=,直线距离=。
(2)围长类尺寸计算:围长为头部某一截面线的围度,由于采用卷尺手工测量围长的过程可以近似于求截面线上点集的凸包长度的过程,因此本系统中采用计算截面线上点集凸包长度的方法来计算围长,凸包计算采用Graham扫描算法[9]。
(3)弧长类尺寸计算:弧长类测量项目的计算和围长相似,不同点主要有两点:1)求得截面点集后,首先需要根据弧长的首末端点定义准则来删除不在弧长上的点;2)对剩下的点进行B样条拟合,用B样条的长度作为弧长。
4.系统设计与实现4.1 功能概述针对每个被测者,本系统读入被测者头部点云数据,通过对点云去噪、建立标准测量坐标系完成预处理;然后采用几何特征分析的方法自动识别人体所有测点,并进行测量项目的自动计算。
系统完成的主要功能如下:(1)被测者管理:系统使用数据库来存储和管理被测者的个人信息、模型信息、测点和测量项目信息,提供相应的查询、增加、删除、修改、报表生成、结果打印功能。
(2)读入并显示头部模型:将被测者的点云模型读入系统,并对其进行浏览和显示。
(3)测点识别:通过采用几何特征分析的方法,借助人体比例关系等方法,在没有人工干预的情况下,自动识别头部测点。
(4)测点编辑与更新:系统自动识别测点后,用户可以通过交互编辑的方式修改测点位置。
(5)自动测量:在测点自动识别完成后,系统能够自动计算头部所有测量项目的尺寸。
(6)测量结果输出:系统能够将被测者的头部尺寸测量结果以Excel表格文件进行输出。
(7)批处理:在用户指定一个头部模型数据文件目录后,系统可以自动的完成该目录下全部模型的自动测量工作。
4.2 系统模块本系统采用模块化设计,将整个系统划分为七个独立的模块:文件操作模块、数据库管理模块、渲染引擎模块、配置管理模块、XML组件模块、测点识别模块、自动测量模块。