航海动态仿真系统中的CAGD与FBM算法
横纵摇仿真计算方法

横纵摇仿真计算方法横纵摇仿真计算介绍横纵摇仿真计算是一种用于船舶设计和性能评估的重要工具。
通过模拟船舶在海上航行时的横纵摇运动,可以预测船体的稳定性和航行舒适性,为船舶设计和操作提供参考。
方法在进行横纵摇仿真计算时,有多种方法可以选择,下面列举了一些常用的方法:1.基于数值方法的仿真计算:–有限元方法:利用有限元分析技术,将船体划分为有限个小单元,并在每个单元上进行运动计算,最终得到整个船体的横纵摇响应。
–边界元方法:将船体表面划分为小面元,并在每个面元上进行运动计算,通过求解船体表面的位移和应力,得到横纵摇响应。
–时域方法:将船体的运动方程转化为常微分方程组,通过数值积分方法求解得到横纵摇响应。
2.基于经验公式的计算:–根据船舶的几何特征和运动参数,利用经验公式进行横纵摇响应的估算。
这种方法简单快速,适用于快速评估船舶设计的初步稳定性。
3.基于模型试验的仿真计算:–在水池或风洞内对船模进行试验,通过测量船模的运动响应和环境载荷,利用相似原理进行横纵摇仿真计算。
应用领域横纵摇仿真计算广泛应用于以下领域:•船舶设计:通过横纵摇仿真计算,可以评估不同设计方案的稳定性和舒适性,优化船体结构和布局。
•载荷计算:对于运输船舶来说,横纵摇仿真计算可以预测货物和燃油在船舶上的运动特性,为货物固定和燃油消耗的计算提供依据。
•航行舒适性评估:横纵摇仿真计算可以预测船舶在不同海况下的航行舒适性,为船舶的操作和乘客的体验提供参考。
结论横纵摇仿真计算是一种重要的工具,对船舶设计和性能评估起着关键作用。
通过选择合适的方法,可以得到准确可靠的横纵摇响应结果,为船舶的设计、操作和乘船提供参考依据。
横纵摇仿真计算介绍横纵摇仿真计算是一种用于船舶设计和性能评估的重要工具。
通过模拟船舶在海上航行时的横纵摇运动,可以预测船体的稳定性和航行舒适性,为船舶设计和操作提供参考。
方法在进行横纵摇仿真计算时,有多种方法可以选择。
下面列举了一些常用的方法:1.基于数值方法的仿真计算:–有限元方法:利用有限元分析技术,将船体划分为有限个小单元,并在每个单元上进行运动计算,最终得到整个船体的横纵摇响应。
船舶回转运动硬件在环模拟测量系统设计

图 2 物理转台系统构成
其中 NSK ̄PS ̄DD 马达为超大扭力伺服马达ꎬ
117
2019 年
第6 期
船海工程
第 48 卷
宰德广ꎬ等:船舶回转运动硬件在环模拟测量系统设计
工作原理是通过脉冲驱动马达转动ꎮ 控制板通过
串口接收船舶运动模拟器 ROT 数据ꎬ并通过串口
向马达驱动器发送旋转控制指令驱动马达旋转ꎮ
6. 12
26
5. 94
54
5. 88
25
⋮
⋮
0. 24
0. 18
0. 06
13. 33
28. 57
⋮310. 00来自113. 33
1
0. 12
28. 57
1
25. 00
10. 00
变化ꎬ在 6. 00 (°) / min 开始变为以 0. 06 (°) / min
间隔递减ꎬ直至趋近于零ꎮ 若接收到的速度值大
于 91. 44 ( °) / minꎬ则取最大值 91. 44 ( °) / minꎮ
由于控制工程实际应用中注重系统在保持稳
定性方面的性能ꎬ船舶在转弯之后航向逐渐趋向
由上节可知 DD 马达是通过改变输入脉冲量控制
稳定ꎬ回转率在很小范围波动ꎬ故本系统在零值附
转动角度ꎬ则可以在固定的定时时间内改变步长
息ꎬ通过串口传输到物理转台系统ꎬ驱动马达旋
态 敏 感 性 较 好ꎬ 有 利 于 船 舶 的 操 纵 控 制 [4] ꎮ
速率测量系统通过陀螺仪敏感转台转动得到其角
得船舶回转率就比较方便快速ꎬ同时陀螺仪的动
MEMS 陀螺仪是通过直接敏感船体的回转运动来
获得回转率的ꎬ对于教学研究工作来说ꎬ有必要在
双向航道船舶交通流元胞自动机模型及仿真

双向航道船舶交通流元胞自动机模型及仿真
双向航道船舶交通是指船舶在一个双向航道中相互交错行驶的交通模式。
在双向航道中,船舶需要遵守严格的通航规则,以保证交通顺畅和安全。
为了研究双向航道船舶交通
流的行为和性质,可以采用元胞自动机模型进行仿真。
元胞自动机是一种离散动力学系统模型,它通过将空间划分成小的元胞,并规定每个
元胞的状态和规则来模拟系统的演化过程。
在双向航道船舶交通流的元胞自动机模型中,
每个元胞代表一个船舶,并具有状态、位置、速度等属性。
模型中的规则包括通航规则和
动力学规则。
通航规则描述了船舶在双向航道中的行驶规则,例如限速、交叉时互相避让等。
通过
定义船舶的状态和位置,可以根据通航规则决定船舶的行驶方向和速度。
如果两艘船舶在
交叉口相遇,根据通航规则,先来先行,可以决定哪个船舶可以继续前进。
动力学规则描述了船舶的运动方式和速度变化规律。
船舶的运动受到水流、风力、操
纵力等影响,可以根据这些因素来确定船舶的加速度和速度变化。
通过模拟船舶的运动,
可以研究船舶交通流的行为和性质。
通过元胞自动机模型进行双向航道船舶交通流的仿真,可以得到交通流的密度、流量、速度等统计数据,并进行可视化展示。
这些数据可以用于评估航道的通行能力和安全性,
优化航线规划和交通管制措施,提高航道交通的效率和安全性。
双向航道船舶交通流元胞自动机模型及仿真是一种研究航道交通流行为和性质的有效
方法,可以为航道管理和交通控制提供科学依据和决策参考。
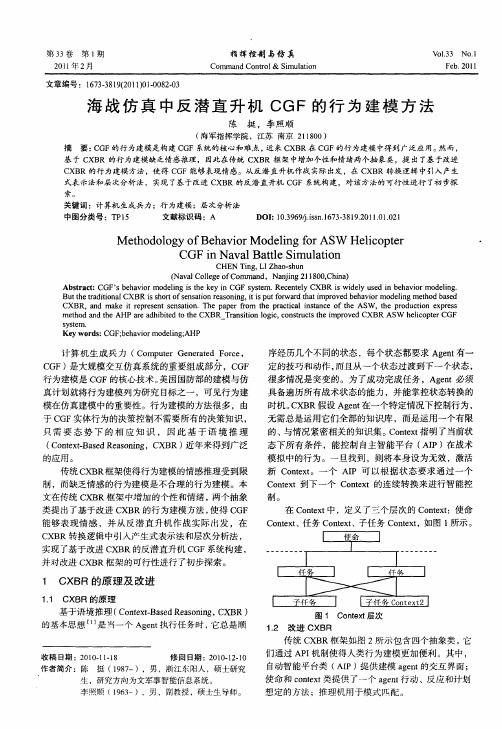
海战仿真中反潜直升机CGF的行为建模方法
Ke r s CGF;e a i r d l g AHP ywo d : b h vo mo e i ; n
计 算 机 生 成 兵 力 ( o p t eea d F re C m ue G nrt oc , r e
序经历几个不同的状态 ,每个状态都要求 Agn 有一 et
CHE T n . I a .h n N i g L o s u Zh
( aa C lg C mmad N vl o ee f o l o n ,Naj g2 】0,hn) ni 18 0C i i n a
Ab t a t sr e :CGF Sb h vo d l g i t ek y i GF s se Re e t l ’ e a i rmo ei h e C y tm. c n ey CXBR Swi ey u e n b h vo d l g n S n i d l s d i e a i rmo e i . n Bu eta i o a t h dt n l t r i CXBR i s o t f e s t n r a o ig i i p t o wa dt a r v d b h v o d l gmeh d b s d h r o n ai e s n n . t S u r r t mp o e e a ir S s o f h i mo e i t o a e n CXB R,a d ma e i r p e e ts n ai n h a e r m h r ci a i s n e o h W , h r d c in e p e s n k t e r s n e s t .T e p p r fo t e p a t l n t c ft e AS o c a t e p o u t x r s o meh d a d t e AHP a ea hb td t eCXBR r n i o o i. o s u t t e i r v d CXBR W e io trC t o h n r d i i t e oh T a st n lg c c n t cs h mp o e i r AS h l p e GF c
航海模型知识-(4)
航海模型知识讲座市双河新村小学建栋航海模型,是指船舶、军舰的模型,通常是指体育运动项目中的模型制作、比赛、展览、表演。
它是一项科技、军事、体育、文化教育活动。
通过制作模型、比赛、展览、表演等多种形式,了解关于船舶、海军、海洋方面的各种知识,提高他们的综合素质。
航海模型是具有科技性的体育运动项目,通过研究制作、在水上操纵各种模型,学习航海科学知识。
航海模型在我国已开展四十余年,受到广大群众,特别是青少年的喜爱。
航海模型种类很多,分类的方法也各有不同。
按照世界航海模型运动联合会NAVIGA的规则,航海模型的竞赛项目分为五类:1.动力艇航海模型(M),燃机动力圆周竞速和无线电遥控单艇或多艇竞速的竞速艇模型。
2.仿真航海模型(C),只评比建造工艺技术水平的舰船、设备及建造场景等各类模型。
3、耐久竞速艇(FSR),无线电遥控,按专用竞赛场地、航线在规定的较长时间里集体竞速绕圈航行的竞速艇模型。
4、帆船模型(S),它是一种无线电遥控帆船模型。
5、仿真航行航海模型(NS)我国开展的航海模型项目有:仿真模型、动力艇模型、帆船模型和表演模型等多。
一、仿真模型类(项目代号C)仿真模型:要求按照一定比例建造,在外型、颜色上仿照现有的或者历史上曾经有过的海洋和河交通工具,或这些交通工具的一部分的模型;以及用模型来展示码头、船坞,船舶的航行状态等。
仿真模型竞赛:裁判对仿真模型制作的仿真度、工艺质量、难度、准确度等进行评分,按分数高低排名。
仿真模型竞赛分六个级别C1级-无动力船舶模型,即划桨船或帆船模型;C2级-有机械动力的船舶模型;C3级-设备模型、零部件模型和船舶剖面模型,以及与航海有关的场景模型45C4级-按1:250或更小的比例制作的C1、C2和C3级模型;C5级-装在玻璃瓶或者其它玻璃容器的模型;C6级-塑料材质的商业套材模型;C7级-纸板、纸质模型。
二、动力艇模型类(项目代号M)动力艇模型:可用无线电遥控的模型,艇型为自由设计。
双向航道船舶交通流元胞自动机模型及仿真

双向航道船舶交通流元胞自动机模型及仿真引言随着全球船舶交通的日益繁忙,保证船舶安全和交通效率成为一个重要的问题。
为了研究船舶在双向航道中的交通流量,我们提出了一种基于元胞自动机的模型,并进行了相应的仿真实验。
本文将介绍我们的模型设计、实验方法以及仿真结果。
背景在双向航道中,船舶交通流动复杂,不同船舶在航道中的行为会对整体交通造成影响。
因此,研究船舶在双向航道中的交通流量对于提高交通效率和安全性具有重要意义。
元胞自动机是一种模拟复杂系统行为的数学工具。
它可以将系统划分为许多离散单元,每个单元都有自己的状态和行为规则。
通过定义单元之间的相互作用规则,可以模拟出整体系统的行为。
在本文中,我们将利用元胞自动机模型来模拟双向航道中的船舶交通流。
方法模型设计我们的元胞自动机模型基于以下假设:1.航道被划分为离散的单元格,每个单元格代表一段长度相等的航道。
2.每个单元格可以容纳一艘船舶。
3.船舶的行为受到速度限制和相邻船舶的影响。
4.船舶可以做出四个动作:保持当前速度、加速、减速、变道。
基于上述假设,我们设计了如下的元胞自动机模型规则:1.每个单元格的初始状态为空,可以随机生成船舶。
2.每个船舶根据相邻船舶的位置和速度来决策自己的行动。
3.船舶在行动后,会更新其所在单元格的状态。
实验方法为了验证我们的模型的有效性,我们设计了一系列实验。
实验过程如下:1.初始化航道状态:设置航道长度和初始船舶数量。
2.按照模型规则,更新航道中每个船舶的状态。
3.重复步骤2,直到达到预设的模拟时间。
4.分析仿真结果。
我们将关注航道的流量、拥挤度等指标。
结果与分析经过多次实验,我们得到了如下的仿真结果:1.航道流量与初始船舶数量呈正相关关系。
随着船舶数量的增加,航道的流量也随之增加。
2.船舶的行为会受到相邻船舶的影响。
当船舶密度较高时,船舶更容易受到限制,无法加速或变道。
3.船舶的变道行为能够减少航道的拥塞程度。
当船舶有机会变道时,航道的拥塞情况会得到改善。
船舶动态富余水深DUKC系统简介

: 倾侧量 总富余水深: : 静态吃水变化量
测量误差和 回淤量
速 度 限制 . 尽量 减少 船体 下沉 量 的影 响 。 ( 4 )船 体倾 侧 。船 舶 横倾 将 导致 船 底 富余 水 深 的 减少 ; 当船 舶 转 向时 , 作用 在 船侧 板上 的水 作 用力 作 用 在 船体 重 心 以下 , 使 船体 产生 倾侧 。 船体转 向时倾侧 量 随着 船舶 重 心 的升高 而显 著增 加 ,它与船 舶 横稳 性 高
船舶动态 富余水深 D U KC系统简介
中海散 货 运 输 有 限公 司 张培 超
D U K C系 统 是 指 船 舶 动 态 富余 水 深 的 计 算 系 统 。 为 最大 效率 使 用港 口水深 资源 ,保 障超 限船 舶安 全 和
高效 通 航 ,澳 洲 O MC公 司开发 了此 海上 工 程 软件 , 并
汐 窗 口最 大化 , 并 以此提 高港 口效 率 和安全 。 该 系统 主
要 由港 方 操作 ,船方 只需 提供 相关 资料 或 图纸 .如船 长、 船宽、 型深 、 方 形 系数 、 完 货 时前 中后 吃 水 、 水 线 面
长度、 排 水 量 以及 经 自由液面 修正 后 的横稳 性高 度 等 。
1 船 舶动 态 富余水 深 的计算 原 理
现 在船 艏 , 因此 船艏 下沉 量 即可代 表船 体下沉 量 。 对 于 下 沉 量 的估 算 有 多 种 方 法 ,其 中 比较 安 全 的是 美 国
A r m y C r o p s o f E n g i n e e r s 推荐 的公 式 :
图 中总 富余水 深 为航 道水 深 加潮 高 减 去船 舶 吃水 后 的数 值 。船 底余 量 为 总 富余 水深 减去 船舶 运 动 下沉
双向航道船舶交通流元胞自动机模型及仿真

双向航道船舶交通流元胞自动机模型及仿真引言随着全球贸易的蓬勃发展,航运业也在不断壮大。
船舶在海上航行时,需要遵循一定的航行规则和交通流管理,以确保船舶之间的安全和顺畅通行。
双向航道是一种常见的航道布局形式,船舶在双向航道中通常需要按照规定的航道方向和航行速度进行航行,以避免发生碰撞和交通拥堵。
为了更好地理解双向航道中的船舶交通流动态,本文将基于元胞自动机模型,进行双向航道船舶交通流的仿真研究。
双向航道的特点双向航道是指一条水道中,分为两个方向的航道,在双向航道中,船舶需要根据具体情况选择适当的航道,并遵守双向航道的相关规定。
双向航道的特点包括:1. 确定的航道方向:双向航道通常会规定一定的航行方向,船舶需要按照规定的航行方向进行航行,以避免与对向船舶发生碰撞。
2. 交通流管理:双向航道中的船舶需要依据交通流管理规定,遵守航行速度和超车规定,以确保船舶交通的顺畅和安全。
3. 航道宽度:双向航道需要根据实际的航行需求确定航道的宽度,以满足船舶的通行需求。
元胞自动机模型元胞自动机是一种基于网格的离散动力学系统模型,通常用于模拟复杂系统的动态行为。
在元胞自动机中,系统被划分为若干个元胞,每个元胞都具有一定的状态,并且随着时间的推移,元胞的状态会发生变化,从而导致整个系统的状态发生变化。
元胞自动机模型的特点包括:1. 离散性:元胞自动机模型是一种离散的模型,系统的状态是离散的,并且系统的演化也是离散的。
2. 局部相互作用:在元胞自动机中,元胞之间存在局部的相互作用,即每个元胞的状态变化只与相邻的元胞的状态有关,而与整个系统的状态无关。
3. 复杂系统建模:元胞自动机模型适用于模拟复杂系统的动态行为,例如交通流、城市发展等。
双向航道船舶交通流元胞自动机模型本文基于元胞自动机模型,构建了双向航道船舶交通流的仿真模型。
具体模型包括:1. 网格划分:将双向航道划分为若干个网格,每个网格对应一个元胞,船舶的位置和状态由各个网格表示。