STAR机械手-SP FIV操作说明书
机械手触摸屏说明
机械手触摸屏使用说明书一、 连接说明:1、将24V 连接至触摸屏24V 端子上,不要接错极性。
2、将随机带的232线连接到HMI —PLC 上。
3、通电屏上PWR 灯点亮,CPU 灯低频闪,COM 灯高频闪为正常。
4、屏幕先启动LOGO 画面后进入系统等待界面,点击选择项进入。
屏幕若出现报警信息,可根据报警信息处理故障。
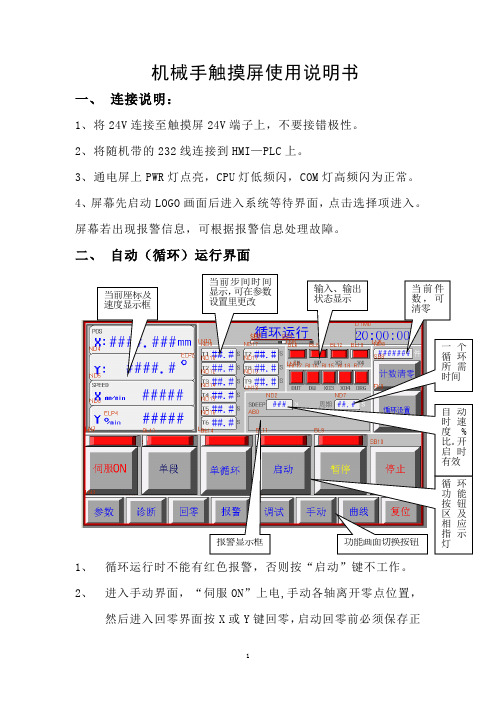
二、 自动(循环)运行界面1、循环运行时不能有红色报警,否则按“启动”键不工作。
2、 进入手动界面,“伺服ON ”上电,手动各轴离开零点位置,然后进入回零界面按X 或Y 键回零,启动回零前必须保存正确的零点坐标。
步进时间在参数设置界面里,不用延时为0。
3、 运行参数:X 轴行程-500~500最高运行速度80000mm/min,Y轴-360度~360度最高30000度/min 。
加减速No1: 500ms No2:1000ms ,其它值默认。
4、 “暂停”键按下循环暂停等待,再按下“启动”键工作。
5、 “单循环”键按下时,经过一次循环后停止,用于调试或工作结束回到起点。
单循环有周期显示,超过设定周期会报警。
6、 “单段”键主要用于步进调试,再按下“单段“键恢复循环。
7、 按循环设置键可转到各轴循环座标点及速度的设定。
8、 停止时按“停止”键,若再按“启动”键就要从起始点运行。
停止时吸盘等会保持当前状态,如果需要复位点击 “复位”键。
循环运行时进入手动界面各动作键操作无效。
三、手动操作界面1、 手动各轴。
在不回零时也可运行,但不会显示座标,回零后才能显示。
2、 在参数设置界面可预置手动速度值,再经过手动倍率开关选择运行速度,指针是指示速度的倍率,有12种倍率选择。
3、 手动动作状态键只有在循环停止后才有动作输出。
四、 回零操作界面1、 座标栏的数都置零,回零后当前座标显示栏XY 值都应是0,然后手动移动各轴找到机械手的初始位置,将此时显示座标输入至零位座标栏并保存,再次回零后就是零点座标,也就确定了工作循环的初始位置。
机械手使用说明书
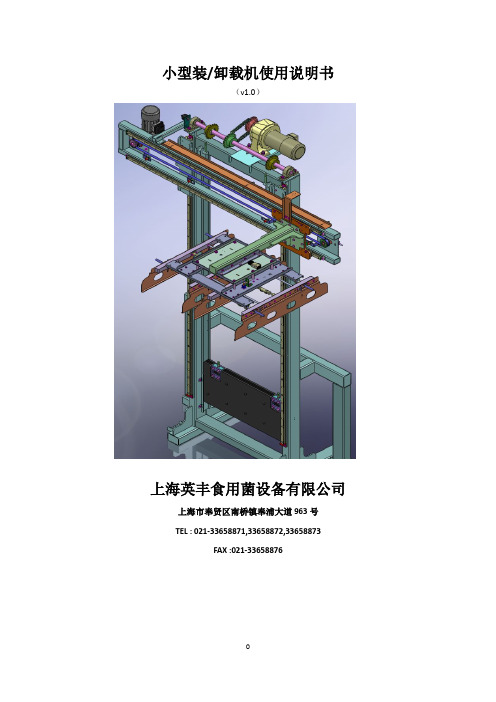
小型装/卸载机使用说明书(v1.0)上海英丰食用菌设备有限公司上海市奉贤区南桥镇奉浦大道963号TEL:021-********,33658872,33658873FAX:021-********小型装载机各部件说明上升下降电机左右移动电机上下移动横臂左右移动臂机械手爪子配重机械手加紧放松气缸左右移动位置的接近传感器目录1.运行开始前检查事项----------42.操作各部分名称及用途----------53.操作顺序----------74.停止顺序----------75.运行中按紧急停止按钮的情况及再开运行----------86.自动返回原点的动作条件及顺序----------87.自动判别层数的动作及条件----------88.手动操作的必要性及设定方法----------98-1低速上升及下降机械手臂8-2正常运行速度(高速)上升及下降机械手臂8-3左/右低速水平移动机械手臂8-4正常运行速度(高速)左/右低速水平移动机械手臂8-5打开夹紧爪8-6机械手臂回复原点8-7机械手臂的左右原点,停止点的调整法8-8机械手臂的最小水平移动高度的调整法9.各种安全装置的种类及动作效果----------139-1根据不同位置超下降9-2爪子夹紧/松开异常9-3装筐时-筐掉下9-4卸筐时-筐掉下9-5装筐时-筐下降不良9-6卸筐时-筐下降不良9-7变频器异常9-8上下左右超时9-9编码器异常9-10制动及上升/下降,水平旋转过于移动10.运行中异常种类及检查事项----------1710-1.手动/自动都不能运行时10-2.虽然箱子集中但是没有下降时10-3.虽然机械手臂下降但是没有夹紧时10-4.虽然夹紧但是没有上升时10-5.夹紧箱子上升后没有左右水平移动时10-6.左右移动后没有下降时10-7.下降到托盘目的地后没有打开夹紧爪时10-8.松开夹紧爪后没有上升时10-9.托盘上到达上升点后没有回复原点时10-10.离目的地过度脱离(冲突)10-11.码垛状态不是垂直时11.跟随主要部分故障时现象及检查方法----------1911-1输送机的传感器11-2接近传感器11-3机械手臂部的编码器11-4电机11-5制动器11-6夹紧部分气缸传感器12.编码器原点设定常用步骤----------2613.变频器异常显示及检查事项(请参照变频器使用说明书)14.附电气图纸1.运行开始前检查事项1)确认托盘供应系统上的托盘输送到位没有2)保证托盘供应系统周围及小型装载机周围无障碍物.3)确认托盘供应系统和小型装载机控制箱内的指示灯亮/灭状态4)小型装载机机械手臂上升及下降的接近传感器及感应板是否正常固定5)小型装载机机械手臂上的左右横向移动的各接近传感器是否正常固定6)筐子整列输送线上的各个感应器是否正常固定7)机械手爪子的夹紧气缸感应器是否正常固定8)上下及左右的电机运转正常(手动运转)9)检查压缩空气的压力是否充足(5Kg/㎠以上)10)箱子的边缘损坏时运行中存在掉下的可能性,请注意使用.2.操作各部名称及用途<控制板上部位置>①电源显示灯输入220AC时开关电源②ON时红色灯点灯各个操作部分可以使用状态.②电源开关运行时这个开关旋转顺时针方向ON后①号灯点灯.③报警各种异常时发出报警并不同的警报,警报音不一样.详细请参照13项(警报分析).并且1托盘操作结束后连续报警2秒.④紧急停止开关按这个按钮时所有功能立即停止,解除时必须旋转顺时针方向.⑤托盘确认按钮(必须等托盘移动到指定位置后按按钮)⑧托盘确认指示灯(托盘确认按钮按下后,点亮直至该托盘工作结束)⑥开始开关按黄色开关后进行以下动作.a.自动/手动开关在自动位置时1.各部分在原点时:显示灯点灯并进行自动运行2.各部分不在原点时:进行回复自动原点动作并灭灯回复原点后跟1项一样.3.头一次慢速下降至托盘之后正常速度运行.(自动确认码垛层次过程)*运行中按开始按钮时,按后头一次慢速下降.b.自动/手动开关在手动位置时不进行上下及水平旋转动作,只启动筐移动用的筐整列输送机,本体的故障原因不能使用时有用.⑦停止开关使用于运行中停止时,机械手臂抓筐启动时(上/下或左/右移动)一个过程结束后停止.<控制板内部DOOR面的位置>A、手动/自动开关:正常运行时往前推转换成自动状态手动操作时相反的方向后操作其它开关.B、上/下移动开关:手动上下移动的方向上下移动时低速运行.这时候控制板上部的停止开关按住情况下操作时,可以使用正常速度动作(减速位置减速,停止位置停止等)C、左/右移动开关:手动左/右移动时使用操作跟上下开关一样.**左右及上下时根据各位置存在安全限制详细请参考6及7项**D、夹紧开关:抓筐的爪子夹紧及松开试验时使用(自动运行时为夹紧)E、设定用开关:设定上下/左右移动等时使用-详细请参考6及7项3.操作顺序1.电源开关ON后确认显示灯是否点亮.2.电源显示灯以外的灯必须灭灯并且无警报音.3.按开始按钮.这时候短暂的警报音时打开控制板盖子后,确认手动操作状态及紧急停止按钮的状态4.机械手臂不在原点位置时先自动运行原点回复动作.(爪子在整列输送机一侧的上方)5.托盘放好停止位置后按托盘确认按钮.这时候第一次按下托盘确认后,点亮托盘确认灯,开始码垛直至该托盘结束,托盘确认灯灭灯,或者托盘到达指定位置后自动重复上述动作6,最后一层码垛结束,机械手回复开始点后,2秒的警报音,这时候替换托盘4.停止顺序1.机械手臂在筐整列上部时,按停止按钮立即停止.2.夹紧筐的状态下按停止按钮时操作结束后在中央上部停止.3.确认停止后为了安全按紧急停止按钮.5.运行中使用紧急停止的情况及再运行5-1启动紧急停止的情况1.操作中机械运行路径上有障碍需要紧急停止时2.预测安全事故时3.机械手臂下降后夹紧筐时,没有顺利夹紧警报时4.因机械手臂的异常现象时(发生超速,范围脱离等)5.操作人员离开工作场所时6.设备维修工作时.5-2紧急停止时的效果1按紧急停止按钮时运行中的一切电机立即停止(根据电机的速度冲击不一样,停止距离会有一定的变化)2夹紧动作动作结束的状态下紧急停止——没有变化(维持)3整个操作过程回复到结束状态再开机运行时从头开始.6.自动原点动作条件及顺序动作始点:停止状态下每按运行开始按钮时不在原点位置时自动回复原点动作(整个过程低速运行)动作过程:1夹紧爪松开时松开传感器点亮后2机械手臂不在上升限位时,上升到接近传感器靠近传感器感应板为止(低速上升)3机械手臂不在整列输送机上方时以整列输送机为基准低速移动7.自动层数判别动作及条件动作开始点:每第一次开始运行时动作动作过程:托盘码垛第一层筐时低速下降动作原理:托盘感应筐的位置后自动决定码垛位置8.手动操作必要性及设定方法8-1必要情况1检查及调整设备2检查自动情况时动作环境3运行中发生异常时措施4调整上下左右位置及原点时打开控制板盖子后“自动/手动”开关转换成手动后,使用以下操作.8-2设定方法A.机械手臂低速上升及下降在整列输送机一侧使用上升/下降用开关,推或拽时动作.B.机械手臂正常运行速度(高速)上升及下降控制板上部的停止按钮按住的情况下启动上升/下降开关上升时:启动到上升限制点为止下降时:1整列输送机位置——夹紧一列筐时输送机和筐底部间约50mm间隙时停止2托盘位置-推车和筐底部间约50mm间隙时停止.*注:上限传感器点亮时制动器立即启动只能手动下降.:下限传感器点亮时立即启动只能手动上升9-.机械手臂左/右低速移动1从左往右移动:左/右移动开关向右推,手臂到达另一侧停止点(接近传感器)后停止,.这时候需往左移动时,开关回复中央位置后再往左移动.2以上往左移动:以上同样(方向相反)**左&右移动停止点(两侧的停止点)时不能再进行.**9-.机械手臂正常运行速度(高速)左/右移动条件:机械手臂在左或右的终点位置时(即停止点,也同时是开始点)在终点之外位置时只能手动低速移动控制板上的停止按钮按住的情况下操作以上C步骤的动作.*机械手臂加速后高速移动于另一侧的减速点减速后低速平缓到达停止位置时正常*E.松开夹紧夹紧开关打开时打开关闭时夹紧F.机械手臂回复原点不明原因没有自动回复原点或脱离编码器时,对准机械手臂的上下及左右位置值.(这叫原点化)1.左右原点化操作顺序1).手动上下开关把机械手臂充分上升,避免左右移动时与整列输送机碰撞.2).使用手动左右移动开关,左或右移动全程时3.再操作开关往整列输送机方向移动至停止为止,移动停止时放松开关.*确认停止点是否在整列输送机的上方.万一离整列输送机位置脱离很多时根据以下G项”机械手臂的左右,原点的停止点调整法”调整.2.上下原点操作顺序1)以上1项(左右原点调整)进行后2)输送机上放4个或6个重的筐.3)手动解除夹紧(即打开爪子)4)手动下降确认筐探知用接近传感器点亮(点亮后不再进行下降)5)夹紧筐后上升约500mm的程度(上升时确认筐探知用接近传感器灭灯.)6)手动开关板上右侧最后的setup开关往上.7)确认PLC上的23号灯点亮后.8)整列输送机上,下降到停止为止并发出短暂警报音时证明原点设定结束.9)往上的setup开关回复原位置时启动准备结束。
机械手操作指导书
机械手作业指导书第1页共5页设备名称单轴伺服机械手设备规格XTB-1000ID1、目的:1.1为规范机械手调整与操作,方便生产,保护模具与设备及人员安全。
1.2此作业指导书是XTB-1000ID单轴伺服机械手的作业指导书,供作业者进行作业时参考用。
2、范围:此作业指导书适用于XTB-1000ID单轴伺服机械手的操作。
3、安全要点:3.1禁止进入到机械手的工作范围。
3.2禁止在运行中维修机械手。
维修时,请关闭空气开关,切断控制箱或操作器电源开关以及电源断路器后,再进行维修。
3.3操作时,必须站于机械手工作范围外。
调试、输入完成后,操作器必须置于注塑机操作面板后的挂钩上。
3.4在使用和操作前请仔细阅读、学习《机械手使用说明书》。
4、注意事项:4.1机械手使用的空气必须是干燥空气。
气源压力在0.4~0.6MPa,空气过滤减压阀表盘中指针调整在0.5MPa左右。
如下图所示:空气过滤减压阀空气过滤减压阀表盘4.2每日检查空气过滤减压阀的积水,并适时排除。
积水水位不得超过满水线。
4.3经常整理、整顿机械手的四周,按《机械手使用说明书》中2.7、2.8、2.9、2.10对机械手进行日常保养。
5、操作流程:机械手作业指导书第2页 共5页设备名称 单轴伺服机械手 设备规格 XTB-1000ID5.1开机前调整:5.1.1将机械手连接电缆接口调换至工作接口。
如下图所示:5.1.2确认机械手所有的电线、电缆都已连接正确,所有的外盖等无破损或不合适的地方。
5.2开机:5.2.1在注塑机开启的情况下,确认机械手控制箱的电源开关、操作器急停按钮处于打开状态。
如下图:5.2.2通过注塑机的操作面板将机械手调整为“使用”。
调整步骤:5.3检查并确认气压、电压:5.3.1检查气源气压、是否达到0.4MPa 以上。
查看前后单元的控制箱侧的电子气压显示表是否为正值。
如下图所示:机械手短接口:机械手停止使用时,将连接电缆接口接在短接口上机械手工作接口:机械手正常使用时,将连接电缆接口接在工作接口上控制箱的电源开关将“不用”调为“使用”机械手作业指导书第3页 共5页设备名称 单轴伺服机械手 设备规格 XTB-1000ID5.3.2查看操作器面板显示,检查机械手系统自检是否良好。
机械手使用说明
助力机械手使用操作说明书北京东昆科技有限公司二零零七年二月二十八日1.概述该机械手用在变速箱装配线上,由气动系统帮助人力,人工操作气动开关控制机械手动作,完成变速箱的搬运、限位。
使用该机械手可以减轻操作人员的的劳动强度,是装配工人的有力助手。
2.技术参数工件重110 kg工作范围大臂长1840mm,水平旋转角度360°弯臂长1240mm,水平旋转角度±150°小臂长780mm,水平旋转角度360°上下运动1800mm控制部分气动气源工作压力≥0.6 Mpa重量930 kg3.结构与工作原理该设备为四连杆机构人工移动型气动助力机械手,机械手在以立柱支撑的回转装置上,由人工可以在360°的范围内回转。
缸体装配机械手的回转装置上装有制动气缸,气缸活塞杆端部的制动机构可使大臂在任意位置制动;大臂为四连杆机构,平衡气缸活塞杆端部铰链与大臂连接,以平衡弯臂、小臂、卡具和工件的重量;升降制动机构可保证四连杆机构升降过程停在任一位置,也可使四连杆机构在意外断气情况下处于原来位置;四连杆末端有机械手的弯臂,弯臂可绕大臂末端的轴线转动±150°;弯臂的下部是小臂,可绕弯臂末端的垂直轴线旋转±180°,小臂末端是卡具。
每个轴均可由制动气缸活塞杆端部的制动装置保持在任意位置。
工作时,操作人员将机械手拉到工作地点,由人工把持机械手臂将卡具以垂直方向送入缸盖位置,将手柄下压后,将定位块对准缸盖孔,人工按下夹紧按扭,将缸盖夹住,此时高压气接通,再按下平衡按钮,向平衡气缸内送进高压,使机械手能轻松的带载运行。
提起缸盖后,由人工扳锁紧手把,压缩弹簧,然后转动手轮,将缸盖旋转到所需角度,按下翻转按扭,将夹具翻转90°,把缸盖放在加工工位,按下卸载,检查无误按下互锁按钮,夹紧气缸松开,此时平衡气缸内的压力变为低压,使机械手脱载运行。
完成一个缸体的抓取、移动、到位等动作。
STAR(星塔)机械手
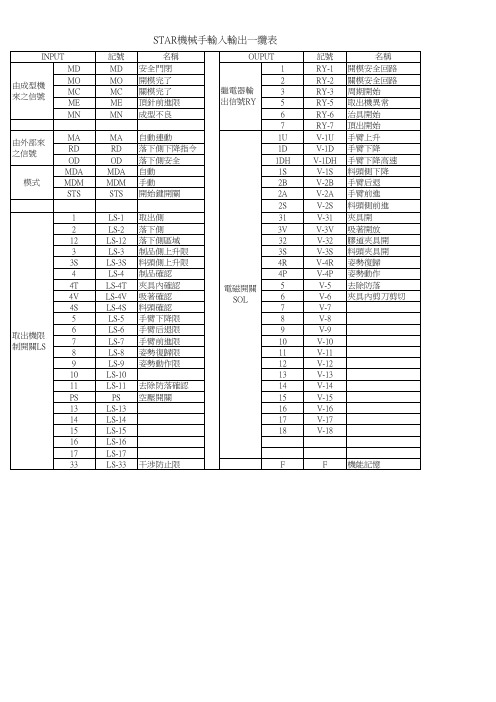
MD
由成型機
MO
來之信號
MC
ME
MN
由外部來 之信號
模式
MA RD OD MDA MDM STS
1
2
12
3
3S
4
4T
4V
4S
5
取出機限 制開關LS
6 7 8
9
10
11
PS
13
14
15
16
17
33
記號 MD MO MC ME MN
MA RD OD MDA MDM STS
LS-1 LS-2 LS-12 LS-3 LS-3S LS-4 LS-4T LS-4V LS-4S LS-5 LS-6 LS-7 LS-8 LS-9 LS-10 LS-11 PS LS-13 LS-14 LS-15 LS-16 LS-17 LS-33
F 機能記憶
去除防落確認 空壓開關
OUPUT
1
2
繼電器輸
3
出信號RY
5
6
7Байду номын сангаас
1U
1D
1DH
1S
2B
2A
2S
31
3V
32
3S
4R
4P
電磁開關
5
SOL
6
7
8
9
10
11
12
13
14
15
16
17
18
干涉防止限
F
記號 RY-1 RY-2 RY-3 RY-5 RY-6 RY-7 V-1U V-1D V-1DH V-1S V-2B V-2A
STAR機械手輸入輸出一纜表
名稱 安全門閉 開模完了 關模完了 頂針前進限 成型不良
机械手操作规程1

机械手操作规程
一适用范围
本规程适用于机械手。
本规程适用于公司各生产车间、操作员工。
二、开机注意事项
2.1 必须接受岗前培训,合格后方可操作机械手.未经培训人员严禁操作机械手.
2.2开机前检査机械手气源是否接通,调节气压阀气压在0.6Mpa~0.8Mpa之间.电压是否正常
2.3伺服电机回原点后.速度要调整适当,以手臂在运行中不震动为准.
2.4时间.气压调整要适当,以即能保证取出正常又能保证周期吋间最短.
2.5安装的治具时设备要处于停止状态.在安全范围内.治具安装要紧固.位置要正确
2.6调对位置时要所有速度压力要减小,以免夹具和机器碰伤人.位置达到指定位置数据要输入保存
2.7调整后要试运行,要注意力要高度集中,发现不正常.立马按急停
三、运转中注意事顼.
3.1 每天要点检一次机械手运转状况.检査是否拥气、螺丝松动、有无震动.取出位置有无移位,气班是否在5kg/cm2~8kg/cm2之间•
3.2 机械手运转中,人不可站在机械手落下或动作的范围内,也不可把手或其它的物体伸入机械手动作的安全范围内.
3.3 在生产中要注意机械手运转是否异常,如有异常响声或滑动不顺,应立即停止进行检査,另外平时应对机械手固定螺丝进行点检看是否松动和滑丝。
四、停机注意車项.
4.1在不使用机械手时必须把机械手背置于安全位置,以防机器运动时手臂落下而损坏.
4.2.手控器不可随意乱放,要放置在指定的地方。
4.3. 不使用时一定要切断机械手电源.气源。
4.4 要清洁机械手皮带,导轨.加注润滑油,定期保养维护。
2019-03-04发布 2019-03-15实施。
SP 系列机器人本体使用说明书
2.1 机器人本体构成图 .................................................................................................................... 3 2.2 机器人机械参数 ........................................................................................................................ 4 2.3 机器人负载参数 ........................................................................................................................ 4 2.4 运动参数.................................................................................................................................... 7 2.5 工作空间.................................................................................................................................... 8
可为精密机械手面板按键说明书

可为精密机械手面板按键说明书一、精密机械手面板按键简介精密机械手面板按键是指安装在机械手操作界面上的各种功能按键,它们用于控制机械手的运行状态和实现各种功能。
本文将为大家详细介绍精密机械手面板按键的功能及操作方法,帮助大家更好地掌握机械手的使用技巧。
二、面板按键功能及操作方法1.电源开关:用于控制机械手的开启和关闭。
在开启机械手前,请确保电源开关处于关闭状态,以免发生意外。
2.模式切换:用于在不同工作模式间切换。
一般来说,精密机械手具有手动模式、自动模式等多种工作模式,用户可以根据实际需求进行切换。
3.速度调节:用于调整机械手的运动速度。
速度调节按钮通常有多个档位,用户可以根据实际操作需求选择合适的速度档位。
4.抓手松开/收紧:用于控制机械抓手的开合。
在抓取物品时,请确保抓手已经完全收紧,以确保物品的稳定。
5.复位按钮:用于将机械手恢复到初始位置。
在机械手出现故障或需要重新开始操作时,可以使用此按钮进行复位。
6.故障自检:用于检测机械手是否存在故障。
当机械手出现异常时,故障自检按钮会发出提示信号,帮助用户及时发现并解决问题。
三、面板按键维护与保养为确保精密机械手面板按键的正常使用,用户需定期对其进行维护和保养。
具体措施包括:1.保持面板按键清洁,避免灰尘和污渍影响按键灵敏度;2.定期检查按键连接线,确保连接良好,避免因线缆损坏导致故障;3.避免在高温、潮湿、腐蚀性环境中使用,以免影响按键的使用寿命。
四、安全注意事项在使用精密机械手面板按键时,请务必遵守以下安全注意事项:1.在操作机械手前,请确保已阅读并理解操作说明书;2.操作过程中,请勿将手或身体部位伸入机械手工作区域,以免发生意外伤害;3.遇到故障时,请及时关闭电源,并联系专业人员进行维修;4.定期检查机械手状态,确保其正常运行。