基于Snake 模型的血管树骨架三维重建技术
基于B-Snake的三维图像骨架化方法

基于B-Snake的三维图像骨架化方法
田绪红;韩国强;司徒志远;陈茂资;宋鸿陟
【期刊名称】《计算机科学》
【年(卷),期】2008(035)009
【摘要】3D图像数据由于其本身的复杂性,对其进行骨架化一直是3D图像处理中的一个难点问题.文中提出了一种B-Snake骨架化算法及B-Snake能量最小化求解法,同时讨论一种骨架化算法的评价方法.B-Snake骨架化算法获取的骨架其连通性和光滑性隐含于B-Spline表达式中,而且在中心性及抗噪声性等方面也明显优于离散Snake算法.对模拟的测试数据和实际三维重建的植物根系图像进行了实验,结果都表明了文中提出的算法的有效性.
【总页数】5页(P241-244,265)
【作者】田绪红;韩国强;司徒志远;陈茂资;宋鸿陟
【作者单位】华南农业大学信息学院,广州510642;华南理工大学计算机科学与工程学院,广州,510642;华南理工大学计算机科学与工程学院,广州,510642;华南农业大学信息学院,广州510642;华南农业大学信息学院,广州510642;华南农业大学信息学院,广州510642
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于形态学约束的B-Snake模型的细胞图像自动分割方法 [J], 胡炯炯;于慧敏;房波
2.基于升序复核的并行三维图像骨架化算法 [J], 滕奇志;康瑕;唐棠;何小海
3.基于颗粒分析和骨架化的车道线检测方法 [J], 刘超;穆平安;戴曙光
4.三维图像骨架化方法综述 [J], 韩国强;田绪红;李志垣;司徒志远
5.基于骨架化、骨架划分获取书法汉字结构特征方法 [J], 苗晋诚
因版权原因,仅展示原文概要,查看原文内容请购买。
血管的三维重建课件

m(:,:,b+1)=imread([int2str(b),'.bmp']); end
血管的三维重建
-10-
建模方法思想
需考虑的细节:
2)何谓边界点?
四邻域的概念 找边界点坐标的算法
血管的三维重建
-2-
Z=0
Z=49
Z=98
Z=1
Z=50
血管的三维重建
Z=99
-3-
假设
1)血管的表面是由半径固定、球心沿着某一曲 线(称为中轴线)的球滚动而形成的包络面。 2)中轴线上任两点处的法截面圆不相交。 3)管道中轴线与每张切片平面有且只有一个交 点。
血管的三维重建
-4-
图象的矩阵表示
后面的切片。
Z=57
Z=60
血管的三维重建
-22-
误差大的原因和改进途径
误差大的原因:
1)图象误差 实际图象边界上的点是连续的,在转换成
bmp图象时,象素表示的图象边界是离散的,成 锯齿状,与实际图象有误差(舍入误差)。 2)同一张切片上的最大内切圆不唯一
解决办法:
1)方法一:取平均 求出同一张切片上的所有最大内切圆的圆心,然 后求平均值。
问题重述
断面可用于了解生物组织、器官等的形态。例如,将 样本染色后切成厚约1m m的切片,在显微镜下观察该横断 面的组织形态结构。如果用切片机连续不断地将样本切成 数十、成百的平行切片, 可依次逐片观察。根据拍照并 采样得到的平行切片数字图象,运用计算机可重建组织、 器官等准确的三维形态。
假设某些血管可视为一类特殊的管道,该管道的表面是 由球心沿着某一曲线(称为中轴线)的球滚动包络而成。 例如圆柱就是这样一种管道,其中轴线为直线,由半径固 定的球滚动包络形成。
血管的三维重建_图文资料

作者:张雄、李宁娟、贾雪娟血管的三维重建摘要随着现代医学的发展,科学对人类病例的研究不再局限在表面现象,在实际研究中利用断面可了解生物组织、器官等的的横截面形态和结构•从而可大大提高人类对某些疾病的预防和治疗•针对这一问题,本文由血管的I张连续的平行切片图象计算血管的中轴线与半径,并绘制血管在三个坐标平面上的投影来探讨血管的三维重建•由于血管的表面是由球心沿着某一曲线(即中轴线)的球滚动而成,由此我们得出结论:每个切片一定包含滚动球的大圆,并且他一定为切片的最大内切圆,而最大圆对应的半径即为血管的半径,所以求血管半径就转化为求每一个切片内部的点到切片外部轮廓线的所有最短距离中的最大值即为血管半径•本文从「张切片图中随机抽取I张切片图,运用MATLAB软件,得到其最大内切圆的圆心及半径,求取平均值,再用圆心拟合求出中轴线.最后根据中轴线求出它在「、「’、八、平面的投影图•关键字MATLAB软件中轴线半径平均法一、问题重述断面可用于了解生物组织,器官等的形态.例如,将样本染色后切成厚约的切片,在显微镜下观察该横断面的组织形态结构•如果用切片机连续不断地将样本切成数十、成百的平行切片,可依次逐片观察•根据拍照并采样得到的平行切片数字图像,运用计算机可重建组织、器官等准确的三位形态•假设某些血管可视为一类特殊的管道,该管道的表面是由球心沿着某一曲线的球滚动包络而成•现有某管道的相继张平行切片图像,记录了管道与切片的交•图像文件名依次为’:格式均为;,宽,高均为「I ■个象素•为简化起见,假设:管道中轴线与每张切片有且只有一个交点;球半径固定;切片间距以及图像象素的尺寸均为•试计算管道的中轴线与半径,给出具体的算法,并绘制中轴线在"、「、厂平面的投影图•二、模型假设1. 假设管道中轴线与每张切片有且只有一个交点;2. 假设球半径固定;3. 假设切片间距以及图像象素的尺寸均为;4•假设血管无严重扭曲;5•假设切片拍摄不存在误差,数据误差仅与切片数字图像的分辨率有关三、符号说明■内点的X轴坐标'内点的y轴坐标''切片轮廓线上的点的X轴坐标切片轮廓线上的点的y轴坐标坐标为-的内点到轮廓线的距离第张切片图的最大内切圆半径四、模型分析对于这个血管的三维重建模型,由于血管的表面是由球心沿着某一曲线(即中轴线)的球滚动而成,我们对此得出结论:若切片与中轴线有交点,且管道的法向横断面是圆,则该切片必含有半径与球体相同的最大圆,即为切片的最大内切圆,而最大圆对应的半径即为血管的半径,圆心则在交点处•所以求血管半径就转化为求每一个切片内部的点到切片外部轮廓线的最大半径•利用计算机,运用MATLAB软件,搜索出张切片图的最大内切圆的半径,并找到每张切片中轴线与切片交点的坐标,记为中轴线坐标,即圆心坐标.利用这些坐标,求出血管的中轴线.在根据中轴线求出它在■ 、「’、「'•平面的投影图•五、模型的建立与求解(1 )半径和圆心的求取(见附录1)a:运用MATLAB软件将每张切片的「文件转化为’ 矩阵,代表黑色,代表白色•同时将切片的轮廓线也存为| 矩阵•b:在「张图片中随机抽取了I张切片的图片(…、・「•••_ ),做出它们的轮廓线,找出每个内点距离轮廓线的最小距离,即为以这个内点为圆心的最小内切圆的半径;在以内点为圆心的最小内切圆中找出距离最大的那个内切圆,即为这幅图的最大内切圆,该内点的坐标即为圆心的坐标,该距离即为最大内切圆的半径(见表一).表一最大内切圆最大内切圆的圆心坐标切片号的半径X轴Y轴Z轴0 29.0689 96 257 09 29.5367 96 259 919 29.9672 96 268 1929 29.6142 98 290 2939 29.9362 115 338 3949 29.6873 146 377 4959 29.8526 202 411 5969 30.0134 268 423 6979 29.7302 361 396 7989 29.6974 396 369 8999 30.0000 446 257 99c:用算数平均法求取半径•10□尸=——|]即’-■:(2)求解拟合曲线的方程及平面投影图通过表的数据,运用MATLAB软件先进行-次线性拟合得…面的投影图,再进行次线性拟合得 '及「面的投影图和中轴线的空间分布图及拟合方程•图依次如下:(附录2和3)中轴线在■■面的拟合方程:厂 ';V I:「.厂+ E :,、疋―I 心—:疋"疋中轴线在•面的拟合方程:J ■- . . : | ■.+- I2.769x1(1 - .t+ 2 563中轴线在’:面的拟合方程:z= -0.7 X ]0 4- 1490^10 IL A'- 7.9^4<L0 ' .v2.7S4x W \v 5.245^10 JC+ 5.261 x 10 \t-L8O2F130--»-六、模型评价及改进模型评价由于解决三维血管重组这问题问题十分繁杂,文中没有数据,故而在处理数据时应用了MATLAB等数学处理软件对图片进行处理得出大量数据并采用算数平均法进行了科学精确地处理,保证了数据整合以及结果计算的精准度;本文选取的数据较少,使得结果存在一定的误差,同时采用动态地逼近最大内切圆半径的求解过程,其计算量庞大•模型改进本文针对三维血管重组问题分别找出血管的中心轴、半径以及在.、「、「、的投影和'的空间图形建立模型,对于这类模型可推广到其他更广范围•可运用于研究人体的其他器官的形态结构,为人类的医学作出大量的贡献•七、参考文献【1 】赵静、但琦,数学建模与数学实验(第二版),北京:高等教育出版社【2】朱道远,数学案例精选,北京:科学出版社,2003.【3】薛定宇陈阳泉,高等应用数学问题的MATLAB^解,北京清华大学出版社八、附录1、找出半径及圆心坐标p=ones(512,512;p2=ones(512,512;s=sprintf('d:\\99.bmp';%'*'是我们所选的第* 张图p(:,:=imread(s;p2(:,:=edge(p(:,:;imshow(p2(:,:;ff=555*ones(512,512;% ”55这5“个数必须大于实际半径for i=1:512for j=1:512if p (i,j==0for m=1:512for n=1:512if p2(m,n==1t1=sqrt((i-m*(i-m+(j-n*(j-n;if ff(i,j> t1ff(i,j=t1;endendendendendendendfor i=1:512for j=1:512if ff(i,j==555 % 这个数与上面的一致ff(i,j=0;% 这个数应该小于等于0end endendr=max(max(ff(:,:;for j=1:512for i=1:512if r-ff(i,j<0.1%'0.1'是确定它的误差c1=i;c2=j;endendendrcl %'c1'是空间中x轴的坐标c2 %'c2'是空间中y轴的坐标2、中轴线在—、’”、「‘平面的投影图z=[0,9,19,29,39,49,59,69,79,89,99];c仁[96,96,96,96,115,146,202,268,361,396,446];c2=[257,259,268,290,338,377,411,423,396,369,257]; A=polyfit(z,c1,4B=polyfit(z,c2,6;C=polyfit(c1,c2,6;x=polyval(A,z;y=polyval(B,z;figure(1plot(x,ytitle('血管的中轴线在xoy面的投影'xlabel('x'ylabel('y'grid onprin t(1,'-djpeg','e:\xoy.jpeg';figure(2plot(x,ztitle('血管的中轴线在xoz面的投影'xlabel('x'ylabel('z'grid onprin t(2,'-djpeg','e:\zox.jpeg';figure©plot(y,z3、拟合方程A=polyfit(z,c1,4% (中轴线在■■面的拟合方程) B=polyfit(z,c2,6% (中轴线在面的拟合方程)C=polyfit(c1,c2,6%( 中轴线在-面的拟合方程。
基于Snake模型的血管树骨架三维重建技术

c o e o o t ieGT ( o er a sain ma r . Th r l h s n t p i z m Ge m ty Tr n lto ) ti x idy,a c r ig t h e t r ft e c o d n o t efa u eo h
b o d v s es l o e s l ,GVF( a in c o o Gr d e t Ve t rFl w)i u i z d a x e n l n r y o D n k n h x S t ie se t r a e g f l e 3 S a ea d t ee — p e so fmi i zn h x e n le e g s d d c d A tl s , t e S a e ie a i ey e o v o r s i n o n mii g t e e t r a n r y i e u e . a t h n k t r tv l v l e t — wa d h r e c n i u a i n o h l o e s l ,s t f i g t e c n t an fb i g s o t . Th r s t e tu o f r to f t e b o d v s es a i y n h o sr i to e n m o h g s e
t e c nt ri s o o d v s e so h ng o a hy i g s h e e lne fbl o e s l n t e a i gr p ma e .Se o l c nd y,i d rt i d c r e po — n or e o fn o r s nd
为 每 一 点 找 到 准 确 的 对应 点 . 中研 究 了一 种 基 于 S a e 型 的 重 建 方 法 . 在 采 用 多 尺 度 Gao 滤 波 提 取 造 影 文 nk 模 它 br
数学建模血管的三维重建问题
A题血管的三维重建问题摘要:本论文讨论基于切片的血管三维重建问题。
其背景是:采取存储二维切片信息,使用时再利用切片信息重建原物体三维形态的方法,可以有效地保存和利用三维信息。
此技术在实际中有很大的用途,在医学和其他领域有广泛的应用。
如要将人体全部三维信息,包含内部错综复杂的结构,完整地存储在计算机中,以现在的技术也是有一定难度的,但若改用存储人体切片信息,使用时重建再现的方法,则是利用现有技术可以解决的。
本论文基于题中对血管形态的假设,建立管道中轴线参数方程,并综合考虑实际情况中由于切片厚度及数字图像离散化带来的偏差,通过在每张切片图像中搜索其中阴影区域所能包含的最大圆面,确定管半径为R=29,在此基础上,将每张切片图像中阴影区域所能包含的半径大于等于R的圆面圆心作为中轴线与各切片交点(即中心点)的候选点集合。
本模型使用了三种改进算法对该候选点集进行筛选以确定实际交点。
最终迭代算法简述如下:1.对每个切片,建立中心点的候选点集,并取点集的中位点为中心点初值2.利用得到的中心点建立中轴线方程3.利用中轴线方程推导导数信息,根据导数信息比例选取中心点的候选点集的某点作为中心点的新值4.重复步骤2、3,直至结果达到较稳定状态为止5.输出中心点及中轴线方程在模型建立中,对选取侯选点集、求中位点、利用导数信息进行比例选取均给出完整的算法,并且对半径确定、候选点选取、采用导数作为比例选取依据等问题给出详尽的证明。
考虑到实际血管的中轴线应充分光滑,计算最终中轴线参数表达式时采取了六阶多项式拟合。
最后用还原的血管形态模拟切片过程可以得到一系列数字图像,与原切片图像进行比较,可以检验模型的合理性及精度。
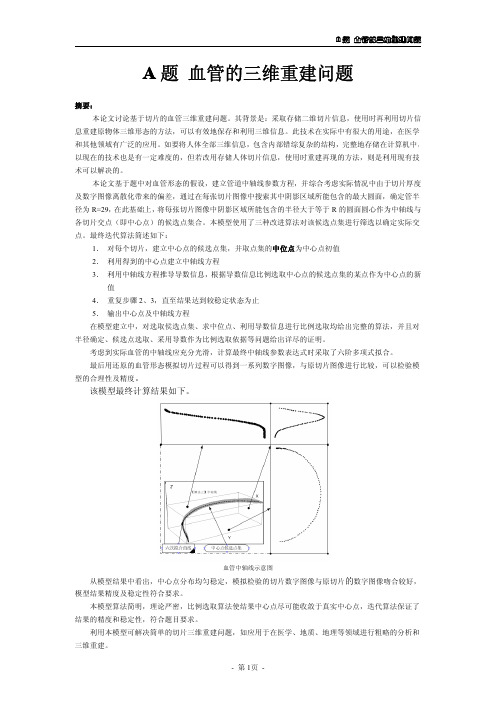
该模型最终计算结果如下。
血管中轴线示意图从模型结果中看出,中心点分布均匀稳定,模拟检验的切片数字图像与原切片的数字图像吻合较好,模型结果精度及稳定性符合要求。
本模型算法简明,理论严密,比例选取算法使结果中心点尽可能收敛于真实中心点,迭代算法保证了结果的精度和稳定性,符合题目要求。
基于Snake 模型的血管树骨架三维重建技术

基于Snake模型的血管树骨架三维重建技术曹治国,彭博*,桑农,张天序华中科技大学图像识别与人工智能研究所,湖北武汉430074摘要:从两幅不同角度的造影图像实现血管树的三维骨架重建,传统重建方法常常需要较多的人工干预,才能为每一点找到准确的对应点。
文中研究了一种基于Snake模型的重建方法。
它在采用多尺度Gabor滤波提取造影血管中轴线的基础上,选取血管树分叉点,优化几何变换矩阵,提高用以初始化snake的对应点的准确性;然后,针对血管的特性,文中采用GVF(Gradient Vector Flow)流量场作为三维Snake的外部能量场,并给出最小化血管snake模型能量函数的表达式,使Snake保持自身平滑连续的同时在空间中发生形变以逼近真实轮廓。
实验结果表明,该方法与传统的重建方法相比,不但减少了人工干预,而且有效地提高了重建精度。
关键词:血管造影; 三维重建; snake模型; GVF(Gradient Vector Flow)1.引言血管造影图像(DSA)是临床诊治冠心病的主要依据。
血管的三维重建技术不仅能为医生提供形象、直观的三维血管形状图像,而且可以辅助测量血管的有关参数(如直径大小、血管长度和截面积等),从而有助于冠心病的诊断和治疗。
因此根据血管造影图像重建血管的三维骨架具有很好的临床意义和很高的应用价值。
在传统的双平面造影图像重建方法中,大部分都是采用自底向上的重建方法,这种方法是基于图象的特征提取并通过找到每一对对应点进行重建[1][2]。
这类方法最大的问题是,找到全部完全准确的对应点很困难,从而使得重建结果不精确。
一些研究人员在寻找对应点方面做了大量的改进[3][4],这些方法虽然提高了寻找的对应点的精确度,但同时也大大增加了计算的复杂性和计算量。
文献[5]提出了采用Snake模型[6]重建血管造影图像的自顶向下的方法,与传统的方法相比,它只需选用少量可以描述血管轮廓的点作为对应点即可,并且Snake的自动性较好,它通过同时结合两幅图像上的特征,使Snake在空间中不断发生形变,从而逼近真实轮廓,获得较高的重建精度。
基于snake模型的IVUS图像序列三维分割方法

工 程 图 学 学 报
J URNAL OF ENGI o NEERI NG GRAP CS HI
2 1 0 1
N0 6 .
第 6期
基 于 s a e模 型 的 I nk VUS图 像 序 列 三 维 分 割 方 法
孙 正 , 杨 宇
( 华北 电力大 学电子与通信 工程 系,河北 保定 0 10 7 0 3)
s g n ai n a pr a he .The pr po e t d i xp rme t l v la e i a ge d t s t f e me tto p o c s o s d meho S e e i n a l e au td n Ir aa es o y I VUS i a e ci i al d rv d fo h m a o o a y a tre .Re ul d mo s ae t t I m g s ln c l y e e r m u n c r n r re is i s t e n t t ha VUS s r i g sc n b ut ma ial . uik y a d r la y s gme t dwiht mOd ma e a ea o tc ly q c l n eibl e n e t heme . Ke wor :c mpu e pp i ai ;i a e m e t to y ds o tr a lc ton m ge s g n a i n;pa al lpr e sn r l oc s i g;ita a c a e n r v s ulr
Ab ta t A D p rl l to rp sdfrsg nigi rv sua lao n I US s c: 3 a l h di po oe o eme t t ac l ut su d( r a e me S n na r r V )
造影图像序列中血管运动跟踪的Snake方法

[ Abstract] A novel method tracking two2dimensional motion of heart vessels from angiographic sequences based on Snake was presented in this paper. The skeleton position in previous frame was used as initial guess of its position in the current frame , and dynamic information between consecutive time instants could be obtained during Snake deforming from its initial position to current position. Dynamic program2 ming and greedy algorithm were adopted respectively in the calculation of optimal Snake , and their characteristics in terms of the number of iterations , computation cost and convergence were discussed. The effectiveness of this method has been demonstrated on clinical single2plane coronary artery angiograms and results were encouraging. [ Key words] Coronary angiography ; Motion tracking ; Snake ; Dynamic programming
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Snake模型的血管树骨架三维重建技术曹治国,彭博*,桑农,张天序华中科技大学图像识别与人工智能研究所,湖北武汉430074摘要:从两幅不同角度的造影图像实现血管树的三维骨架重建,传统重建方法常常需要较多的人工干预,才能为每一点找到准确的对应点。
文中研究了一种基于Snake模型的重建方法。
它在采用多尺度Gabor滤波提取造影血管中轴线的基础上,选取血管树分叉点,优化几何变换矩阵,提高用以初始化snake的对应点的准确性;然后,针对血管的特性,文中采用GVF(Gradient Vector Flow)流量场作为三维Snake的外部能量场,并给出最小化血管snake模型能量函数的表达式,使Snake保持自身平滑连续的同时在空间中发生形变以逼近真实轮廓。
实验结果表明,该方法与传统的重建方法相比,不但减少了人工干预,而且有效地提高了重建精度。
关键词:血管造影; 三维重建; snake模型; GVF(Gradient Vector Flow)1.引言血管造影图像(DSA)是临床诊治冠心病的主要依据。
血管的三维重建技术不仅能为医生提供形象、直观的三维血管形状图像,而且可以辅助测量血管的有关参数(如直径大小、血管长度和截面积等),从而有助于冠心病的诊断和治疗。
因此根据血管造影图像重建血管的三维骨架具有很好的临床意义和很高的应用价值。
在传统的双平面造影图像重建方法中,大部分都是采用自底向上的重建方法,这种方法是基于图象的特征提取并通过找到每一对对应点进行重建[1][2]。
这类方法最大的问题是,找到全部完全准确的对应点很困难,从而使得重建结果不精确。
一些研究人员在寻找对应点方面做了大量的改进[3][4],这些方法虽然提高了寻找的对应点的精确度,但同时也大大增加了计算的复杂性和计算量。
文献[5]提出了采用Snake模型[6]重建血管造影图像的自顶向下的方法,与传统的方法相比,它只需选用少量可以描述血管轮廓的点作为对应点即可,并且Snake的自动性较好,它通过同时结合两幅图像上的特征,使Snake在空间中不断发生形变,从而逼近真实轮廓,获得较高的重建精度。
Radeva和Toledo等在此基础上重新定义了Snake的外部能量场,并给出了基于三维Snake模型重建任意角度的造影图象的一般方法[7]。
上述这些工作都只给出单*基金项目:国家重点研究发展计划973项目(2003CB716105)作者联系方式:彭博Email: *******************.cn通讯地址:华中科技大学图像识别与人工智能研究所,湖北武汉430074根血管的重建方法,并且他们是将血管分割与重建同时进行的,由于成像质量的影响和分割技术的局限性,影响了寻找的对应点之间的准确性,并最终影响重建精度。
文献[8]则是采用Snake 模型实现血管树骨架三维重建,不过,它与上述文献均未考虑对成像参数的校正,而未经校正的造影系统的参数(如造影角度,X 射线源到接受平面的距离等)总是不可避免的存在一定的误差,从而造成在实际应用中所得结果也会产生一定误差。
针对这些问题,本文研究了一种基于Snake 模型的血管树骨架三维重建方法。
它在采用多尺度Gabor 滤波提取造影血管中轴线的基础[9]上,根据血管中轴的树状结构选取血管树分叉点,用以优化几何变换矩阵,提高用以初始化snake 的对应点的准确性;然后,本文针对血管的特性,提出采用GVF (Gradient Vector Flow )流量场[10]作为三维Snake 模型的外部能量场,并给出血管的非闭合轮廓能量函数最小化的最佳表达式,使Snake 保持自身平滑连续的同时在空间中发生形变以逼近真实轮廓。
由于采用多尺度Gabor 滤波器提取中轴的方法我们已在文献[9]中进行了详细的描述,因此,本文不再赘述,其它内容则按以下结构组织:第二节简单给出X 射线造影系统的几何描述,和基于几何关系重建的一般方法;第三节介绍初始化Snake ,并给出利用对应点对优化几何变换矩阵方法;第四节分析利用Snake 重建三维血管树的过程;最后,对实验结果进行讨论并出结论。
2造影图象几何关系标准的造影设备由两个独立的,可以自由旋转的X 光系统组成[11]。
两个旋转轴可以在水平和垂直方向上运动。
两光轴交于光心O ,X 光源A,B 到两图象平面的距离SIDA,SIDB 已知。
三维的坐标重建需要一个世界坐标系。
我们假设两光轴互相垂直,世界坐标系的原点在光心,X,Y,Z 轴如图1所示,A 点发出的光线与X 轴重合,B 点发出的光线与Z 轴重合。
A,B 各自的坐标系如图1,A A u v 为平面A 上的坐标系统,B B u v 为平面B 上的坐标系统。
另外存在世界坐标系的同时,光源A,B 也存在各自的坐标系。
在图1中,A 光源坐标系的x 轴与世界坐标系的X 轴重合,y,z 轴分别与Y,Z 轴平行。
假设P 点在光源A 坐标系下的坐标为(,,)A A A x y z ,在光源B 坐标系下的坐标为(,,)B B B x y z 。
则他们之间满足的关系可以写为:B A B A B A x x y R y t z z ⎡⎤⎡⎤⎧⎫⎢⎥⎪⎪⎢⎥=⋅-⎨⎬⎢⎥⎢⎥⎪⎪⎢⎥⎢⎥⎩⎭⎣⎦⎣⎦(1)其中(,)R t 为几何变换矩阵,与造影角度和X 射线源到接受平面的距离等有关[11]。
R 是旋转矩阵,t 是平移向量。
在此三维空间中,一个点P 在一幅图象上的投影可以定义为光源发出的光束经过该点与图象平面的交点A P ,B P ,如图即为直线A AP ,B BP 的交点。
当两幅图象上的对应点已知,两条光线将在空间中交于一点。
在这种情况下,如果成像系统的几何关系已知,并且一对对应点已找到,空间中的三维点是可以重建出来的。
然而实际的情况是,这两束光线可能并不相交,如图2,这主要是因为系统的误差和图像间几何关系的不精确度造成的。
为了解决这个问题,一般是将到两条直线距离最近的点作为真实的点的存在位置[2],如图2。
BB y BAuBBImageAImageB图1 双平面造影系统结构(两光源夹角为90度) 图2 由A P ,B P 重建三维点P3 基于几何变换矩阵优化的Snake 模型初始化对于传统的重建方法而言,找到准确的对应点是十分重要的工作。
其准确与否直接影响到重建的结果。
文献[3]和[4]在寻找对应点方面做了大量的改进。
而一些研究人员[5][7][8]则把三维的Snake 模型应用于血管的重建上,避免了为血管上的每一点寻找对应点的问题,只需要寻找若干对对应点(如起止和分叉点)即可描述出血管的大致轮廓。
再结合Snake 投影到两幅图像上的信息使Snake 不断发生形变,直到它的投影与两幅图像完全重合。
Snake 是一个含有参数的模型[6],它实际上是一个可以不断发生形变的参数样条曲线,三维Snake 模型定义为()((),(),())v s x s y s z s ,其中()x s ,()y s ,()z s 为Snake 上沿X,Y ,Z 轴的分量,s 为弧长参数在[0,1]之间。
为了得到血管的三维Snake 模型,我们需要重建几对对应点作为样条曲线的控制点,从而能够表达三维血管的大致轮廓。
一旦定义了初始的Snake 模型,Snake 就可以根据它在两幅图像上的投影与原图特征的结合使Snake 自身的形态逐渐发生改变。
与此同时,Snake 自身的特点也会保持本身的平滑与连续性。
为了得到血管的初始Snake 轮廓,对于单根血管而言,需要两对以上的对应点按照第2节所述的几何关系对他们进行重建,从而得到三维空间中血管的大致轮廓,初始化Snake 。
对于血管树,由于其特殊的树状结构,文献中一般给出血管的起止点,并选定分叉点描述血管,进行Snake 初始化,如图3 (a)所示。
如果血管形态较为复杂,则对于弯曲度较大的部分,只选取起止,分叉点描述血管的初始轮廓是不够的,此时需要多寻找几个点才能较好表达血管形状如图3( b)中的参考点。
(a) 一般血管树(b) 形态较为复杂的血管树图3 血管树初始点的选取在一幅已提取血管中轴的图像上选定了一组描述血管大致轮廓的点后,需要在另一幅图上找到他们的对应点。
虽然采用Snake 模型后,需要求取的对应点大为减少,但对应点间的匹配准确性仍非常重要。
尽管对于血管树特殊的树状结构而言,可认为分叉点是准确对应的,但对于除分叉点之外的点则都需要用外极线方法寻找对应点,并寻找匹配的血管分支[8]。
不过,由于获取的图像中有些来源于未经校正的造影系统,其系统参数(如造影角度,X 射线源到接受平面的距离等)不可避免地存在一定的误差,因此原参数不能很好的反应两幅图象间的几何变化关系,这样会导致外极线的位置发生偏移,从而影响外极线匹配的准确性,并最终影响到重建结果。
针对这样的问题,本文提出利用准确对应的血管树上的分叉点来优化几何变换矩阵GT ,在此基础上,再通过外极线法求取其它表达初始轮廓的点的对应点,从而提高对应点的匹配准确性。
具体方法是:假设已经匹配好的共轭点对(本文选择血管树中轴上的分叉点对)是[]112112(,),(,)n n p p p p ,可以按照第2节所述方法计算出三维点[]12,,n P P P 的坐标。
将[]12,,n P P P 按原投影角度分别反投影得到新的对应点对''''112112(,),(,)n n p p p p ⎡⎤⎣⎦。
通过比较('11,i ip p ),('22,i ip p ),这里i=1,2…n ,可以计算重建误差:''121122(,)||||||||i i i i i i p p p p p p ε=-+-(1)由此得到目标函数:'2'2112212222''''''1(,)(||||||||)ni i i i i ni i i i i i i i i i i i i F R t p p p p x y y y z z z z ξηξη===-+-⎡⎤⎛⎫⎛⎫⎛⎫⎛⎫⎢⎥=-+-+-+- ⎪ ⎪ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎝⎭⎝⎭⎣⎦∑∑ (2)其中||||表示2-范数,'11||||i i p p -表示'1i p 与1i p 之间的欧式距离。
N 表示n 对从图象中提取的对应点,公式中头两个表达式是计算原第一幅图像上的二维输入点与通过计算得到的相应第i 个三维点重新投影到第一个图像平面上的二维点之间距离的平方。
后两个表达式同样也是定义得在第二幅图像上的二维误差。
由于两个成像系统间的关系可以由旋转矩阵R 和平移向量t 来表示,因此(2)式可以表示为:222''''2''1''''133(,)ni y i i i xi i i i i i i i z i z c p t x y c p t F R t z z c p t c p t ξηξη=⎡⎤⎛⎫⋅+⎛⎫⎛⎫⎛⎫⋅+⎢⎥=-+-+-+- ⎪ ⎪ ⎪ ⎪ ⎪⋅+⋅+⎢⎥⎝⎭⎝⎭⎝⎭⎝⎭⎣⎦∑ (3)上式中kc 表示矩阵R 中第k 列向量。