(完整word版)SerDes知识详解
serdes协议书
serdes协议书SerDes (Serializer/Deserializer) 是一种协议,用于实现数据在串行和并行之间的转换。
它是一种非常重要的通信接口,被广泛应用于通信领域,例如高速数据传输、网络通信和存储系统等。
本文将详细介绍 SerDes 协议,包括其原理、应用和未来发展趋势等。
首先,让我们了解一下 SerDes 的原理。
SerDes 通过将并行数据流转换为串行数据流来实现高速数据传输。
在发送端,SerDes 将并行输入数据进行串行化,然后添加控制信号和同步信号,最后输出为串行数据流。
在接收端,SerDes 将串行输入数据进行解串行化,还原为并行数据流。
由于串行信号可以更快的传输和接收,因此 SerDes 能够提供更高的数据传输速率和带宽。
SerDes 协议有很多应用,其中最常见的是在高速数据通信中的使用。
例如,在以太网通信中,使用 SerDes 技术可以实现多个通道的高速数据传输,从而提高网络速度和性能。
此外,SerDes 还被用于存储系统中,如固态硬盘 (SSD) 和硬盘阵列(RAID) 等,以提供更快的数据访问和传输速度。
另一个重要的应用是在芯片设计中的使用。
在现代芯片中,SerDes 通常用于实现芯片内部各个功能模块之间的高速通信。
例如,芯片中的各个硬件模块(如处理器、内存控制器和外设控制器等)需要频繁地进行数据交换和通信。
通过使用SerDes 技术,可以实现高速、可靠的芯片内部通信,提高芯片整体性能和效率。
SerDes 协议的发展也在不断推进。
随着通信和存储技术的不断发展,对数据传输速率和带宽的需求也越来越高。
为了满足这些需求,新的 SerDes 技术正在研发中。
例如,高速 SerDes技术可以实现更高的数据传输速率,从而满足现代通信和存储系统的需求。
此外,一些研究人员还在探索将 SerDes 技术应用于其他领域,如人工智能和物联网等,以支持更复杂的数据处理和通信需求。
总而言之,SerDes 协议是一种重要的通信接口,用于实现数据在串行和并行之间的转换。
serdes原理
serdes原理SerDes原理解析什么是SerDesSerDes是一种串行器/解串器(Serializer/Deserializer)的简写,它是一种用于将并行数据转换为串行数据(或者将串行数据转换为并行数据)的集成电路(IC)技术。
在数字通信领域,SerDes常用于高速数据传输和通信接口。
串行数据和并行数据在开始解释SerDes原理之前,我们需要了解串行数据和并行数据的概念。
•串行数据是指将数据位按照顺序一个接一个地发送,每个数据位之间通过时钟信号来区分。
•并行数据是指将多个数据位同时发送,每个数据位占用一个信号线。
SerDes的原理SerDes的主要功能是将并行数据转换为串行数据(Serializer)或将串行数据转换为并行数据(Deserializer)。
它由两部分组成:串行器和解串器。
串行器(Serializer)串行器将并行数据转换为串行数据,实现了数据的串行化。
它的输入为多个并行数据位,输出为一个串行数据流。
串行器的工作流程如下:1.并行输入数据位通过数据处理电路进行编码和加工,以适应传输和接收的要求。
2.经过编码和加工的数据经过串行器内部的串行输出电路,逐位地传输到输出信号线上。
3.在串行器内部,每个数据位之间通过时钟信号来同步。
串行器常用于数据传输的发送端,如计算机内部总线、高速网络通信和存储器接口等领域。
解串器(Deserializer)解串器将串行数据转换为并行数据,实现了数据的解串行化。
它的输入为一个串行数据流,输出为多个并行数据位。
解串器的工作流程如下:1.串行输入数据流通过输入接收电路,逐位地接收到解串器内部。
2.在解串器内部,输入数据流中的每个数据位经过时钟信号的同步和解码处理。
3.解码后的数据经过解串器的并行输出电路,并行地输出到多个数据线上。
解串器常用于数据传输的接收端,如计算机内部总线、高速网络通信和存储器接口等领域。
SerDes的应用SerDes技术在现代通信领域有着广泛的应用,主要体现在以下几个方面:1.高速网络通信:SerDes能够在高速网络中实现可靠的数据传输和接收,提升网络带宽和通信速度。
理解SerDes?之三
理解SerDes 之三3.抖动和信号集成( Jitter, SI )抖动是指信号的跳边时刻偏离其理想(ideal)或者预定(expected)时刻的现象。
噪声,非理想的信道,非理想的电路都是产生抖动的原因。
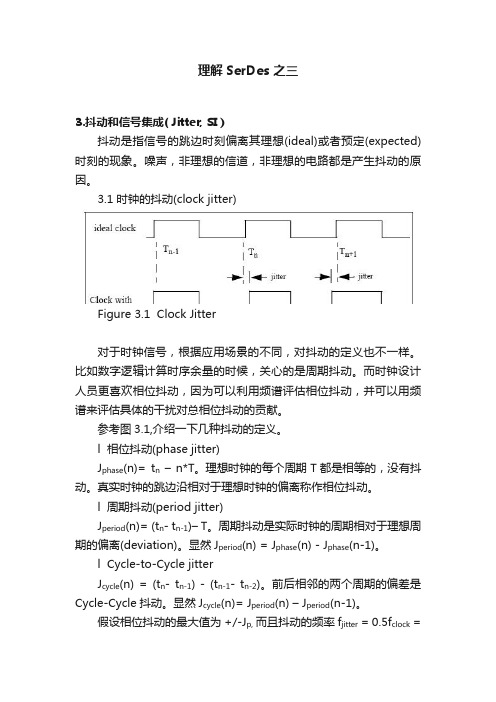
3.1 时钟的抖动(clock jitter)Figure 3.1 Clock Jitter对于时钟信号,根据应用场景的不同,对抖动的定义也不一样。
比如数字逻辑计算时序余量的时候,关心的是周期抖动。
而时钟设计人员更喜欢相位抖动,因为可以利用频谱评估相位抖动,并可以用频谱来评估具体的干扰对总相位抖动的贡献。
参考图3.1,介绍一下几种抖动的定义。
l 相位抖动(phase jitter)J phase(n)= t n–n*T。
理想时钟的每个周期T都是相等的,没有抖动。
真实时钟的跳边沿相对于理想时钟的偏离称作相位抖动。
l 周期抖动(period jitter)J period(n)= (t n- t n-1)– T。
周期抖动是实际时钟的周期相对于理想周期的偏离(deviation)。
显然J period(n) = J phase(n) - J phase(n-1)。
l Cycle-to-Cycle jitterJ cycle(n) = (t n- t n-1) - (t n-1- t n-2)。
前后相邻的两个周期的偏差是Cycle-Cycle抖动。
显然J cycle(n)= J period(n) – J period(n-1)。
假设相位抖动的最大值为 +/-J p,而且抖动的频率f jitter = 0.5f clock =0.5/T,也就是,t n-2时刻的相位抖动为最大值+J p,t n-1时刻的相位抖动为最小值-J pt n时刻的相位抖动为最大值+J p,t n+1时刻的相位抖动为最小值-J p那么,周期抖动最大值 J period=+/- 2* J p那么,Cycle-Cycle抖动最大值 J cycle =+/- 4* J p3.2. 数据的抖动(data jitter)在高速SerDes领域每个人都在说抖动,因为抖动直接和误码率(BER)相关。
SERDES
随着电子行业技术的发展,特别是在传输接口的发展上,IEEE1284被 USB 接口取代,PATA被 SATA 取代,PCI被 PCI-Express 所取代,无一都证明了传统并行接口的速度已经达到一个瓶颈了,取而代之的是速度更快的串行接口,于是原本用于光纤通信的SerDes 技术成为了为高速串行接口的主流。
串行接口主要应用了差分信号传输技术,具有功耗低、抗干扰强,速度快的特点,理论上串行接口的最高传输速率可达到10Gbps 以上。
SERDES是英文SERializer(串行器)/DESerializer(解串器)的简称。
它是一种主流的时分多路复用(TDM)、点对点(P2P)的串行通信技术。
即在发送端多路低速并行信号被转换成高速串行信号,经过传输媒体(光缆或铜线),最后在接收端高速串行信号重新转换成低速并行信号。
这种点对点的串行通信技术充分利用传输媒体的信道容量,减少所需的传输信道和器件引脚数目,从而大大降低通信成本。
这种点对点的通信技术可以提升信号的传输速度,并且降低通信成本。
SERDES 并串行与串并行转换器,串化器/并化器 A device that serializes output from, and deserializes input to, a business machine.SerDes 结构大致可以分为四类:并行时钟SerDes:将并行宽总线串行化为多个差分信号对,传送与数据并联的时钟。
这些SerDes比较便宜,在需要同时使用多个SerDes 的应用中,可以通过电缆或背板有效地扩展宽总线;8B/10B 编码SerDes:将每个数据字节映射到10bit代码,然后将其串行化为单一信号对。
10位代码是这样定义的:为接收器时钟恢复提供足够的转换,并且保证直流平衡(即发送相等数量的‘1’和‘0’)。
这些属性使8B/10BSerDes 能够在有损耗的互连和光纤传输中以较少的信号失真高速运行;嵌入式时钟SerDes:将数据总线和时钟串化为一个串行信号对。
ADV第十五讲课程纪要串行接口(SerDes)技术简介
ADV第十五讲课程纪要串行接口(SerDes)技术简介演讲嘉宾:李闻界P1:大家晚上好,首先谢谢群主的邀请和组织这次网上课程。
这样的分享,我觉得这是一个非常有意义的事情。
我今天和大家分享的是SerDes的一个简单介绍。
P2:第二张PPT是关于我们今天讲的一个主要内容。
第一部分,我们先介绍一下背景,讲述为什么要做SerDes,SerDes是干什么的。
第二部分是讲SerDes的第一个内容timing,与时钟相关的,然后介绍SerDes的第二个内容,关于数据或者是信号、信号处理。
然后给大家分享一下,近年来比较流行的或者是主要的SerDes设计结构。
最后把前面的两部分整合在一起和大家介绍。
P3:十几年前也就是2000年的时候,基本上很多接口还都是并行的。
我们这里举了一个例子在2002年有个PCI x3.0,它是一种并口。
同时这一年intel发明了这个PCIe 1.0,这是一个串口。
PCIX这是64bit的一个并口,每个通道是1.066Gbps。
在最初的计算机接口技术中主要是使用PCI接口。
而这个intel发明的PCIE结构呢,它是一个创新的。
它用了SerDes技术。
它的一个通道是2.5G,然后它可以是x1,x2,x4,x8和x16。
从总体来看呢,英特尔这个x16 的PCIE 1.0还没有它那个64bit 乘以1.066g的PCIX 3.0速度高,但是它没有向前馈clock。
因为x16总共有32根线,它的线会少一些。
并且这个并口需要有一个同步的clock,它会从TX这边传一个同步clock到RX那边作为前馈同步时钟。
这个同步clock的频率是数据的速度的一半,也就是采用DDR这种双边沿采样结构。
但是它这个pciex3.0发布出来之后没有商用。
因为它是64bit并行的,在接收端数据之间会相互错开。
比如说64bit之间错开之后,它们之间没办法用一个clock可把它们同时接收过来。
最关键的是PCIE是一个串口,所以它存活了下来,一直到现在。
一文详解Xilinx高速收发器Serdes
一文详解Xilinx高速收发器Serdes
一、为什么要用Serdes
传统的源同步传输,时钟和数据分离。
在速率比较低时(《1000M),没有问题。
在速率越来越高时,这样会有问题
由于传输线的时延不一致和抖动存在,接收端不能正确的采样数据,对不准眼图中点。
然后就想到了从数据里面恢复出时钟去采样数据,即CDR
这样就不存在延迟不一致的情况,有轻微的抖动也不会影响采样(恢复的时钟会随着数据一起抖动)。
二、为什么要用8b10b,64b66b?
1 提供足够的跳变来恢复时钟
这样还有问题,收发两端必须共地,但往往很难实现。
于是采样差分信号传输,为了防止共模电压在接收端导致电流过大,使用电流驱动模式。
看到接收端有电容进行交流耦合,隔直流。
这样又带来一个问题,需要DC平衡。
所以有了下面另一个原因。
2 DC平衡,即0和1的数量要相等。
3 run length,0和1连续出现的最大长度
AGC自动增益控制需要交流分量才能实现放大
4 comma码,K码
在serdes上面的高速串行流在接收端需要重新串并转化成多字并行,怎么找到字的边界进。
SERDES
SERDES与CDR最近高速先生一直在“围殴时序”,我们看过了外同步/共同步/源同步这些需要“绕等长”的并行信号。
与其说是在“围殴时序”,不如说是在“围殴等长”,时序是“why”,等长是“how”。
虽然“why”不是很好理解,但是作为在闲暇时间还关注高速先生的有追求的工程师们,相信大家还是会将这一部分给啃进去。
串行信号是信号完整性知识的集大成者,虽然在设计上看起来是大道至简。
它的“道”大到内部复杂的硬件实现,损耗串扰反射的管控,预加重均衡的设计等等;也简到只是一条差分线,只需要关注其信号质量即可。
那SERDES的时钟在哪里?我们一直说串行信号的时钟被嵌入在数据中,在刚接触这一概念的时候,小陈就一直在想:“是嵌入在数据的哪一位?难道8b10b这些编码是说的8位数据2位时钟?怎么样用单纯的两位数据来让接收端认识到他是时钟呢?”。
直到后来才发现,原来所谓的“时钟嵌入在数据中”的意思,是时钟嵌入在数据的跳变沿里。
来,大家跟小陈玩个游戏。
现在我们面前有一组数据,我们发现每次上升/下降沿之间的间隔时间是200ps,800ps,400ps,200ps,1000ps•••大家觉得这个数据应该是多少速率的?5Gbps,对吧?现在我们面前又有另外一组数据,其时间间隔为200ps,800ps,400ps,200ps,100ps•••那这个数据的速率是多少呢?大家肯定会说,10Gbps嘛。
没错!恭喜你已经成为了一名合格的Clock Recovery,这就是一个简单的求最大公约数的游戏。
CDR全称是Clock and Data Recovery,除了时钟恢复之外,还有数据恢复。
第一步首先要将恢复出来的时钟与数据的边缘进行对齐,然后再将数据给读出来。
在硬件原理上,使用PLL电路以及触发器即可。
知道了“时钟由捕获的上升下降沿间隔求最大公约数得来”,也就能想到在这个游戏中会碰到的困难了。
实际上我们捕获的时间间隔并不一定是真实时钟周期的整数倍。
serdes 标准
serdes 标准SerDes(Serializer/Deserializer)是一种集成电路,用于在数字通信中将串行数据转换为并行数据,或将并行数据转换为串行数据。
它在许多应用中都扮演着重要的角色,如高速通信、数据存储和计算机网络等领域。
SerDes标准则是指针对SerDes接口的一系列规范和标准,以确保不同厂商生产的SerDes芯片在通信时能够互相兼容和互操作。
首先,SerDes标准在数字通信中扮演着至关重要的角色。
随着数字通信技术的不断发展,人们对数据传输速度和效率的要求也越来越高。
SerDes标准的制定,可以保证不同厂商生产的SerDes芯片在通信时能够互相兼容和互操作,从而促进了数字通信技术的进步和发展。
其次,SerDes标准的制定对于提高系统的稳定性和可靠性具有重要意义。
在数字通信中,稳定性和可靠性是至关重要的,特别是在高速通信和数据存储领域。
SerDes标准的制定,可以确保不同厂商生产的SerDes芯片在通信时能够互相兼容和互操作,从而提高了系统的稳定性和可靠性。
此外,SerDes标准的制定有助于降低系统的成本和复杂性。
在过去,由于缺乏统一的SerDes标准,不同厂商生产的SerDes芯片之间存在兼容性和互操作性的问题,这导致了系统集成和维护的困难。
而有了统一的SerDes标准,不同厂商生产的SerDes芯片可以在通信时互相兼容和互操作,从而降低了系统的成本和复杂性。
最后,SerDes标准的制定对于推动数字通信技术的发展具有重要意义。
随着数字通信技术的不断发展,人们对数据传输速度和效率的要求也越来越高。
SerDes标准的制定,可以促进不同厂商生产的SerDes芯片在通信时能够互相兼容和互操作,从而推动了数字通信技术的发展。
总的来说,SerDes标准的制定对于数字通信技术的进步和发展具有重要意义。
它不仅可以保证不同厂商生产的SerDes芯片在通信时能够互相兼容和互操作,从而提高了系统的稳定性和可靠性,降低了系统的成本和复杂性,还可以推动数字通信技术的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SerDes知识详解一、SerDes的作用1.1并行总线接口在SerDes流行之前,芯片之间的互联通过系统同步或者源同步的并行接口传输数据,图1.1演示了系统和源同步并行接口。
随着接口频率的提高,在系统同步接口方式中,有几个因素限制了有效数据窗口宽度的继续增加。
➢时钟到达两个芯片的传播延时不相等(clock skew)➢并行数据各个bit的传播延时不相等(data skew)➢时钟的传播延时和数据的传播延时不一致(skew between data and clock)虽然可以通过在目的芯片(chip #2)内用PLL补偿时钟延时差(clock skew),但是PVT变化时,时钟延时的变化量和数据延时的变化量是不一样的。
这又进一步恶化了数据窗口。
源同步接口方式中,发送侧Tx把时钟伴随数据一起发送出去, 限制了clock skew对有效数据窗口的危害。
通常在发送侧芯片内部,源同步接口把时钟信号和数据信号作一样的处理,也就是让它和数据信号经过相同的路径,保持相同的延时。
这样PVT变化时,时钟和数据会朝着同一个方向增大或者减小相同的量,对skew最有利。
我们来做一些合理的典型假设,假设一个32bit数据的并行总线,a)发送端的数据skew = 50 ps ---很高的要求b)pcb走线引入的skew = 50ps ---很高的要求c)时钟的周期抖动jitter = +/-50 ps ---很高的要求d)接收端触发器采样窗口= 250 ps ---Xilinx V7高端器件的IO触发器可以大致估计出并行接口的最高时钟= 1/(50+50+100+250) = 2.2GHz (DDR)或者1.1GHz (SDR)。
利用源同步接口,数据的有效窗口可以提高很多。
通常频率都在1GHz以下。
在实际应用中可以见到如SPI4.2接口的时钟可以高达DDR 700MHz x 16bits位宽。
DDR Memory接口也算一种源同步接口,如DDR3在FPGA中可以做到大约800MHz的时钟。
要提高接口的传输带宽有两种方式,一种是提高时钟频率,一种是加大数据位宽。
那么是不是可以无限制的增加数据的位宽呢?这就要牵涉到另外一个非常重要的问题-----同步开关噪声(SSN)。
这里不讨论SSN的原理,直接给出SSN的公式:SSN = L *N* di/dt。
L是芯片封装电感,N是数据宽度,di/dt是电流变化的斜率。
随着频率的提高,数据位款的增加,SSN成为提高传输带宽的主要瓶颈。
图1.2是一个DDR3串扰的例子。
图中低电平的理论值在0V,由于SSN的影响,低电平表现为震荡,震荡噪声的最大值达610mV,因此噪声余量只有1.5V/2-610mV=140mV。
Figure 1.2 DDR3串扰演示因此也不可能靠无限的提高数据位宽来继续增加带宽。
一种解决SSN的办法是使用差分信号替代单端信号,使用差分信号可以很好的解决SSN问题,代价是使用更多的芯片引脚。
使用差分信号仍然解决不了数据skew的问题,很大位宽的差分信号再加上严格的时序限制,给并行接口带来了很大的挑战。
1.2 SerDes接口源同步接口的时钟频率已经遇到瓶颈,由于信道的非理想(channel)特性,再继续提高频率,信号会被严重损伤,就需要采用均衡和数据时钟相位检测等技术。
这也就是SerDes所采用的技术。
SerDes(Serializer-Deserializer)是串行器和解串器的简称。
串行器(Serializer)也称为SerDes发送端(Tx),(Deserializer)也称为接收端Rx。
Figure1.3是一个N对SerDes收发通道的互连演示,一般N小于4。
可以看到,SerDes不传送时钟信号,这也是SerDes最特别的地方,SerDes在接收端集成了CDR(Clock Data Recovery)电路,利用CDR从数据的边沿信息中抽取时钟,并找到最优的采样位置。
SerDes采用差分方式传送数据。
一般会有多个通道的数据放在一个group中以共享PLL 资源,每个通道仍然是相互独立工作的。
SerDes需要参考时钟(Reference Clock),一般也是差分的形式以降低噪声。
接收端Rx 和发送端Tx的参考时钟可以允许几百个ppm的频差(plesio-synchronous system),也可以是同频的时钟,但是对相位差没有要求。
作个简单的比较,一个SerDes通道(channel)使用4个引脚(Tx+/-,Rx+/-), 目前的FPGA可以做到高达28Gbps。
而一个16bits的DDR3-1600的线速率为1.6Gbps*16 = 25Gbps,却需要50个引脚。
此对比可以看出SerDes在传输带宽上的优势。
相比源同步接口,SerDes的主要特点包括:➢SerDes在数据线中时钟内嵌,不需要传送时钟信号。
➢SerDes通过加重/均衡技术可以实现高速长距离传输,如背板。
➢SerDes 使用了较少的芯片引脚1.3 中间类型也存在一些介于SerDes和并行接口之间的接口类型,相对源同步接口而言,这些中间类型的接口也使用串行器(Serializer)解串器(Deserializer),同时也传送用于同步的时钟信号。
这类接口如视频显示接口7:1 LVDS等。
二、SerDes结构(architecture)SerDes的主要构成可以分为三部分,PLL模块,发送模块Tx,接收模块Rx。
为了方便维护和测试,还会包括控制和状态寄存器,环回测试,PRBS测试等功能。
见图2.1。
Figure 2.1 Basic Blocks of a typical SerDes图中蓝色背景子模块为PCS层,是标准的可综合CMOS数字逻辑,可以硬逻辑实现,也可以使用FPGA软逻辑实现,相对比较容易被理解。
褐色背景的子模块是PMA层,是数模混合CML/CMOS电路,是理解SerDes区别于并行接口的关键,也是本文要讨论的内容。
发送方向(Tx)信号的流向: FPGA软逻辑(fabric)送过来的并行信号,通过接口FIFO(Interface FIFO),送给8B/10B编码器(8B/10B encoder)或扰码器(scambler),以避免数据含有过长连零或者连1。
之后送给串行器(Serializer)进行并->串转换。
串行数据经过均衡器(equalizer)调理,有驱动器(driver)发送出去。
接收方向(Rx)信号的流向, 外部串行信号由线性均衡器(Linear Equalizer)或DFE (Decision Feedback Equalizer判决反馈均衡)结构均衡器调理,去除一部分确定性抖动(Deterministic jitter)。
CDR从数据中恢复出采样时钟,经解串器变为对齐的并行信号。
8B/10B解码器(8B/10B decoder)或解扰器(de-scambler)完成解码或者解扰。
如果是异步时钟系统(plesio-synchronous system),在用户FIFO之前还应该有弹性FIFO来补偿频差。
补充:均衡器在通信系统的基带或中频部分插入的,能够减少码间干扰,起到补偿作用的滤波器。
分为频域均衡器和时域均衡器。
频域均衡器频域均衡器利用可调滤波器的频率特性来弥补实际信道的幅频特性和群延时特性,使包括均衡器在内的整个系统的总频率特性满足无码间干扰传输条件。
时域均衡器时域均衡器是直接从时间响应角度考虑,使包括均衡器在内的整个传输系统的冲激响应满足无码间干扰条件。
频域均衡满足奈奎斯特整形定理的要求,仅在判决点满足无码间干扰的条件相对宽松一些。
所以,在数字通信中一般时域均衡器使用较多。
时域均衡器可以分两大类:线性均衡器和非线性均衡器。
如果接收机中判决的结果经过反馈用于均衡器的参数调整,则为非线性均衡器;反之,则为线性均衡器。
在线性均衡器中,最常用的均衡器结构是线性横向均衡器,它由若干个抽头延迟线组成,延时时间间隔等于码元间隔。
非线性均衡器的种类较多,包括判决反馈均衡器(DFE)、最大似然(ML)符号检测器和最大似然序列估计等。
PLL负责产生SerDes各个模块所需要的时钟信号,并管理这些时钟之间的相位关系。
以图中线速率10Gbps为例,参考时钟频率250MHz。
Serializer/Deserializer至少需要5GHz 0相位时钟和5GHz 90度相位时钟,1GHz(10bit并行)/1.25GHz(8bit并行)时钟等。
一个SerDes通常还要具调试能力。
例如伪随机码流产生和比对,各种环回测试,控制状态寄存器以及访问接口,LOS检测, 眼图测试等。
2.1串行器解串器(Serializer/Deserializer)串行器Serializer把并行信号转化为串行信号。
Deserializer把串行信号转化为并行信号。
一般地,并行信号为8 /10bit或者16/20bit宽度,串行信号为1bit宽度(也可以分阶段串行化,如8bit->4bit->2bit->equalizer->1bit以降低equalizer的工作频率)。
采用扰码(scrambled)的协议如SDH/SONET, SMPTE SDI使用8/16bit的并行宽度,采用8B/10B编码的协议如PCIExpress,GbE 使用10bits/20bits宽度。
一个4:1的串行器如图xxx所示。
8:1或16:1的串行器采用类似的实现。
实现时,为了降低均衡器的工作频率,串行器会先把并行数据变为2bits,送给均衡器equalizer滤波,最后一步再作2:1串行化,本文后面部分都按1bit串行信号解释。
一个1:4的解串器如图2.3所示,8:1或16:1的解串器采用类似的实现。
实现时,为了降低均衡器(DFE based Equalizer)的工作频率,DFE工作在DDR模式下,解串器的输入是2bit 或者更宽,本文后面部分都按1bit串行信号解释。
Serializer/Deserializer的实现采用双沿(DDR)的工作方式,利用面积换速度的策略,降低了电路中高频率电路的比例,从而降低了电路的噪声。
接收方向除了Deserializer之外,一般带有还有对齐功能逻辑(Aligner)。
相对SerDes发送端,SerDes接收端起始工作的时刻是任意的,接收器正确接收的第一个bit可能是发送并行数据的任意bit位置。
因此需要对齐逻辑来判断从什么bit位置开始,以组成正确的并行数据。
对齐逻辑通过在串行数据流中搜索特征码字(Alignment Code)来决定串并转换的起始位置。
比如8B/10B编码的协议通常用K28.5(正码10’b1110000011,负码10’b0001111100)来作为对齐字。