PMAC多轴运动控制卡学习(硬件)
PMAC卡简介
1.PMAC卡-简介和预备知识PMAC卡是功能非常强大的运动控制卡,但是网上PMAC的教程很少,仅有的几个教程还是官网培训教程,罗列概念和记流水账,最不喜欢这样的教程。
自己学习PMAC卡的时候走了许多弯路,刚好找完工作就写一下PMAC的相关教程,看完整个系列的教程,相信对于PMAC的使用是没有问题的,主要分为以下几个模块:1.简介和预备知识2.PMAC硬件3.PMAC下位机编程4.PMAC上位机编程PMAC简介PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价格不菲,但是使用及其方便,功能也极其强大,怎么强大自己去搜啦,这是官网链接。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样的,这里我使用的是Turbo PMAC1控制卡。
在国内PMAC有多家代理,笔者固定联系的是苏州均信,维修的话有北京泰道公司,北京泰道公司的官方QQ群号为190220668 ,在群里面可以提问,有各路大神和官方人员解答疑问,群共享里面也有许多资料供学习。
运动控制基础“工欲善其事,必先利其器”,在本文中还是先说一下运动控制相关理论,这里只是一些基本概念,深入了解还是要自行查看相关资料。
定义:在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度(转矩)的控制。
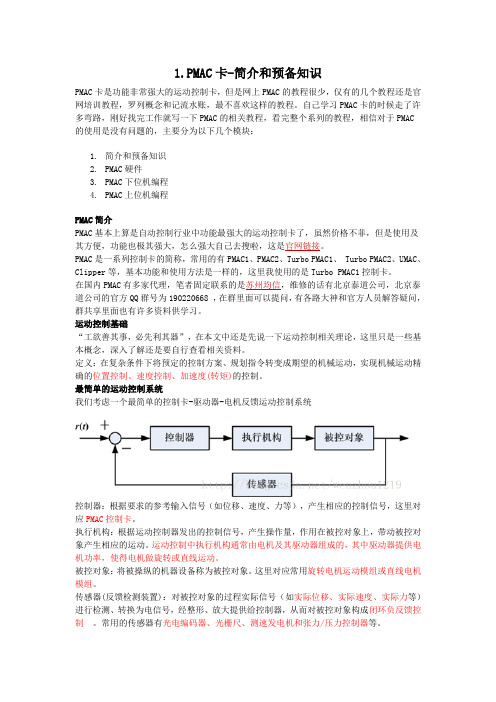
最简单的运动控制系统我们考虑一个最简单的控制卡-驱动器-电机反馈运动控制系统控制器:根据要求的参考输入信号(如位移、速度、力等),产生相应的控制信号,这里对应PMAC控制卡。
执行机构:根据运动控制器发出的控制信号,产生操作量,作用在被控对象上,带动被控对象产生相应的运动。
运动控制中执行机构通常由电机及其驱动器组成的,其中驱动器提供电机功率,使得电机做旋转或直线运动。
被控对象:将被操纵的机器设备称为被控对象。
PMAC培训

PMAC应用培训计划第一天 上午9:30 -10:00 交流培训需求 10:00 -11:40 Pmac卡概述及clipper硬件介绍(含Pmac-pc104) 11:50 -12:50 吃午饭 下午1:00 -2:00 Pewin32pro及相关软件的使用 2:00 -4:00 分组实际操作练习 第二天 上午9:30 -11:40 在线指令和变量说明及注意事项(含Pmac-pc104) 11:50 -12:50 吃午饭 下午1:00 -2:00 PID调节方法 2:00 -4:00 分组实际操作练习 第三天 上午9:30 -11:40 简单运动的编写和plc程序的编写方法 11:50 -12:50 吃午饭 下午1:00 -2:00 简介上位软件的通讯 2:00 -4:00 答疑及分组实际操作练习PMAC应用培训北京钧义志成科技发展有限公司PMAC多轴运动控制卡• PMAC的含义: • PMAC是program multiple axis controller 可编程的多轴运动控制卡。
• PMAC的特点: • PMAC卡是美国Deltatau公司的产品,是集 运动轴控制,和PLC控制以及数据采集的多 功能的运动控制产品。
PMAC卡1型和2型卡的主要区别• 1型卡 控制信号为模拟量,+-10V • 2型卡 控制信号为数字量,直接输出 PWM脉宽调制信号PMAC卡轴数类型• 2轴卡 PMAC MINI PCI MINI PMAC2 • 4轴卡 PMAC PCI Lite PMAC2 PCI Lite PMAC2A-104 • 8轴卡 PMAC PCI PMAC2 PCI PMAC2A-104+ACC1P • 32轴卡 Turbo PMAC PCI Turbo PMAC2 PCIPMAC新产品Clipper• 4轴 Clipper • 8轴 Clipper + Acc1P • 12轴 Clipper + Acc1P(2块)PMAC通讯方式类型• • • • PCI PC104 总线 USB 通讯 (PMAC2A-104 UMAC) 串口 通讯 RS422 或RS232 网卡通讯 ( PMAC2A-104 Clipper)ClipperTurbo PMAC2-Eth-Lite controllerTurbo PMAC Clipper 简介• Turbo PMAC Clipper是一个基于 TurboPMAC2 CPU功能齐全,结构紧凑, 成本的多轴控制器,标配以太网和RS232 通信接口和内置的I O. Clipper提供完整 TurboPMAC 2处理器,并提供最低配置4轴 伺服或步进控制32个数字I / O点。
基于PMAC运动控制卡的机器人控制软件研究

基于PMAC运动控制卡的机器人控制软件研究PMAC运动控制卡是一款开放式可编程多轴运动控制器,利用PMAC运动控制卡的可编程多轴控制及开放的特性,对机器人实现控制系统软件的开发,可以在机器人的操作和控制上更为简便,功能模块化的设计方便用户对系统进一步开发和维护。
标签:机器人;PMAC;软件开发随着社会的发展,机器人的在各方面的运用更为普遍[1],机器人的控制功能更多,操作起来更容易。
在控制方面,如何更高准确完成对机器人的控制,更简单易懂的人机操作界面[2],达成更高效的机器人控制要求,这是在机器人开发的过程中急需解决的问题。
1.PMAC简介PMAC是由美国生产的一种开放式多轴运动控制器,其包含了运动控制、内部运算以及离散控制等基本功能,通过这些基本功能與上位机形成信息通讯,实现PMAC与PC的交互。
PMAC控制器的操作系统具有完全的开放性,内置了由Motorola公司提供的数字处理器DSP 56003。
它在处理信息方面的伺服更新率能达到普通控制器的5倍以上。
PMAC内部自带程序缓冲区和旋转缓冲区,适用于大程序的加工,并具有电子齿轮,随动功能及位置捕捉等功能。
2.运动控制系统研究的意义基于Windows平台开发控制软件可使用VC++作为开发工具。
VC++编程软件拥有强大的功能,在使用时灵活性强,具有很高的开发效率。
利用Visual C++6.0软件来进行控制软件的开发,在开发时可以灵活定制,不受硬件的干扰,不需要对硬件进行更改,只需改变软件的模块,从新定义它们的映射关系就可以软件功能实现更新替换。
采取这样的开发模式,不仅可以更高效快捷的完成功能的扩展,还可以利用到上位机更广泛的资源,循环利用,节省人力资源。
使用户开发出的产品拥有独特的功能特点,增加了自身的竞争力,从而达到控制器的潜力发挥最大化[3]。
3.运动控制系统的硬件结构控制系统的硬件结构由操作模块、运动控制模块以及机器人本体这三个部分组成。
PMAC运动控制系统

编程语言与开发环境
编程语言
PMAC运动控制系统支持多种编程语 言,如C、C、Python等,方便用户 根据项目需求选择合适的编程语言进 行开发。
开发环境
PMAC提供完整的集成开发环境(IDE ),包括代码编辑器、编译器、调试 器等,方便用户进行软件开发和调试 。
运动控制算法
控制器通常采用高性能的微处理器或专用集成电路(ASIC),具有高速运 算和控制能力。
控制器可以实现多轴联动控制,支持多种运动模式和轨迹规划,满足复杂 运动控制需求。
伺服驱动器
伺服驱动器是连接控制器和 伺服电机的桥梁,负责接收 控制器的控制信号,并将其 转换为适合伺服电机运行的
电压或电流信号。
伺服驱动器具有过载保护、 速度控制、转矩控制等功能 ,能够确保伺服电机在各种
PMAC运动控制系统的应用案例
数控机床的改造
数控机床是现代制造业的重要设备, 通过改造数控机床,使用PMAC运动 控制系统,可以提高加工精度、加工 效率和加工质量。
PMAC运动控制系统能够实现高精度 的位置控制和速度控制,同时具有强 大的编程和调试功能,可以根据不同 的加工需求进行定制化配置。
自动化生产线控制
自动化生产线
用于控制生产线的传送带、机械臂等设备的 运动,实现自动化生产。
机器人
用于控制机器人的关节运动,实现机器人的 精确轨迹跟踪和动作控制。
激光加工
用于控制激光切割、焊接和打标设备的运动 ,实现高精度的激光加工。
PMAC的发展历程
1980年代
PMAC的原型问世,主要用于高 精度机床的控制。
1990年代
工况下的稳定运行。
伺服驱动器还具有多种反馈 接口,可以与传感器配合使 用,实现高精度的位置和速 度控制。
PMAC 技术培训(高级)

EEPROM or Flash不被激 活的寄存器
RAM, DSP, ASIC’s上的激 复位、初始化 活的寄存器
工作寄存器
PMAC 主机 读 写
PMAC复位方式 1. 重新上电 2. INIT/信号低/高 3. $$$ 指令 NEW IDEAS IN MOTION
6
PMAC 程序和缓冲区存储
带后备电池 主存储器 [PMAC1]
0.7
1.5 2
PMAC2-VME***
PMAC2-PC Ultralite*** PMAC2-VME Ultralite
VME
ISA VME
0
0
1
1
* 所有型号均有2路附加通道 ** RS422 with Option 9L *** Available with Turbo CPU
NEW IDEAS IN MOTION
TAXI Optical TAXI
MACRO
RAM ROM
FLASH
ENC PWM
ENCODER A/B QUAD
PWM +/- 10 V.
CPU
JEXP
MACRO
Optical
CPU
NO RAM OR FLASH
DAC I/O
TAXI
RJ45
TAXI
96 I/O
基板 + 2 背板
PMAC2 Ultralite 板卡 ! 1) 板卡接口只有 MACRO & I/O 接口 2) 保留了 PMAC2 的基板功能,用MACRO STATION控制8轴。 3) PC & VME 格式 4) TURBO 版本的 PMAC ULTRALITE 能控制 32 轴
串行 通讯 接口
PMAC运动控制系统

增加指令的数值 四、换相更新 1. PMAC 以9KHZ的频率自动进行换向计算和控制; 2. PMAC 测量并估算 转子的磁场定向,然后处理电机的相之间的指令
最新版整理ppt
21
1)PMAC 的功能
五、资源管理 1. 常规管理 定期自动执行资源管理功能,以确认谁正常 2. 报警 跟随误差限制、 硬件超程限制、软件超程限制、 放大器报警 3. 看门狗的更新 在每个PLC扫描之间, PMAC 执行上述任务保证自身的正常更新,如果这些
最新版整理ppt
Spring刚性,刚度
Shock Absorber 减震,吸收
30
Im portant S etup I-V ariables
S E TU P P R O G R AM FU N C TIO N
➢先进的PID及扩展伺服算法
最新版整理ppt
20
1)PMAC 的功能
一、执行运动程序 1. PMAC 在某一时间执行一个运动, 并执行有关运动的所有计算 2. PMAC 总是在实际运动之前,正确地调和即将执行的运动 二、执行PLC程序 1. 以处理器允许的时间尽可能快的扫描PLC程序 2. PLC适用于某些异步于运动程序的运动过程 三、伺服环更新 1.对于每一个电机, PMAC都以一个固定频率(2KH左右)自动对其进行
最新版整理ppt
8
(2)开放式数控系统的结构形式:
✓ PC连接型NC 即将现有原型CNC与PC用通用串行线直接相连的一
种组成形式:DNC ✓ PC嵌入型NC 即在传统的专用数控机床中嵌入PC技术,PC与CNC
之间用专用总线连接。 -840系统。 ✓ 运动控制器+PC型 即在通用PC的扩展槽中插入运动控制卡,完全采用
PMAC多轴运动控制器研究
PMAC多轴运动控制器研究随着工业自动化的快速发展,多轴运动控制器在各种工业应用中的重要性日益凸显。
在这种背景下,PMAC(Programmable Multi-Axis Controller)多轴运动控制器作为一种先进的控制解决方案,引起了广泛。
本文将详细介绍PMAC多轴运动控制器的原理、设计及其实验结果,并探讨其未来研究方向和应用前景。
多轴运动控制器是指能够同时控制多个轴运动的控制器。
在工业自动化领域,多轴运动控制器广泛应用于机器人、数控机床、印刷机等设备。
PMAC多轴运动控制器作为一种可编程控制器,具有高度的灵活性和通用性。
它允许多个轴的运动控制相互独立,同时又协调一致,以实现复杂的运动轨迹和精确的位置控制。
PMAC多轴运动控制器采用基于PC的开放式体系结构,通过高速光纤总线实现与PC的高速数据传输。
控制器硬件由多个轴控制器模块和I/O模块组成,每个轴控制器模块可独立控制一个轴,I/O模块则用于输入输出信号的处理。
PMAC多轴运动控制器的核心是运动控制算法。
算法采用基于矢量控制的方法,通过实时计算速度和位置误差,实现对电机的精确控制。
PMAC还支持多种编程语言,如C++、和Python,方便用户根据具体应用进行软件开发。
为了验证PMAC多轴运动控制器的性能,我们进行了一系列实验。
在实验中,我们将PMAC控制器应用于一台五轴数控机床,通过控制五个电机的运动,实现了对工件的精确切割。
实验结果表明,PMAC控制器在位置控制和速度控制方面都具有很高的精度和稳定性。
我们还对比了PMAC控制器和其他多轴运动控制器的性能。
对比结果表明,PMAC控制器在动态性能、稳态精度和抗干扰能力等方面都具有显著优势。
这主要得益于PMAC控制器的开放式体系结构、高速数据传输和先进的运动控制算法。
本文对PMAC多轴运动控制器进行了详细研究。
通过介绍PMAC控制器的原理、设计和实验结果,我们证明了PMAC作为一种先进的可编程多轴运动控制器,在工业自动化领域具有广泛的应用前景。
PMAC卡简介
1.PMAC卡-简介和预备知识PMAC卡是功能非常强大的运动控制卡,但是网上PMAC的教程很少,仅有的几个教程还是官网培训教程,罗列概念和记流水账,最不喜欢这样的教程。
自己学习PMAC卡的时候走了许多弯路,刚好找完工作就写一下PMAC的相关教程,看完整个系列的教程,相信对于PMAC的使用是没有问题的,主要分为以下几个模块:1.简介和预备知识2.PMAC硬件3.PMAC下位机编程4.PMAC上位机编程PMAC简介PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价格不菲,但是使用及其方便,功能也极其强大,怎么强大自己去搜啦,这是官网链接。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样的,这里我使用的是Turbo PMAC1控制卡。
在国内PMAC有多家代理,笔者固定联系的是苏州均信,维修的话有北京泰道公司,北京泰道公司的官方QQ群号为190220668 ,在群里面可以提问,有各路大神和官方人员解答疑问,群共享里面也有许多资料供学习。
运动控制基础“工欲善其事,必先利其器”,在本文中还是先说一下运动控制相关理论,这里只是一些基本概念,深入了解还是要自行查看相关资料。
定义:在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度(转矩)的控制。
最简单的运动控制系统我们考虑一个最简单的控制卡-驱动器-电机反馈运动控制系统控制器:根据要求的参考输入信号(如位移、速度、力等),产生相应的控制信号,这里对应PMAC控制卡。
执行机构:根据运动控制器发出的控制信号,产生操作量,作用在被控对象上,带动被控对象产生相应的运动。
运动控制中执行机构通常由电机及其驱动器组成的,其中驱动器提供电机功率,使得电机做旋转或直线运动。
被控对象:将被操纵的机器设备称为被控对象。
PMAC多轴运动控制器研究
兰州理工大学硕士学位论文
die, oo ad esr U ig e hrceitc f fwr ad rvr m tr n sno. n t caatrsi o s tae n s h o hrwr , i st fr e ei l nto , m k i rn ra l a dae t e u o t s ca f c in o e u n m ly i s p h p u t a t o M l ia i to cn r le gv s h ge t uc in f dutn u t-x s o in oto lr ie te r a fnto o a jsig m
李丙才摘要传统的轴联动控制通过对多轴运动控制器研究将控制单元与微型计算机构成组合系统由一台微型计算机来统一控制多个控制单元继而控制相应的运动轴实现多轴联动的控制使不同电机之间的运动控制有机协调起来最终目的是达到系统整体的全局性能的最优化
实用价值。
关键词: MC PA 多轴运动控制器
开放式数控系统
运动程序和PC L 程序
同步运行 PD I 参数调节
兰州理工大学硕士学位论文
T e b et t e se t to : e sa c o te h s jc o h d sr a in T r er h h u f i h e f
PA m l ia i m to cnr le i n o t o l r M C u t - x s o
G a u t su e t in a g e r d a e dn :T a X n k t i Ttr L B n c i uo : ig a i
Ab ta t sr c
prmtr D bt cnt ag isl wt te ain agn aaee I, i a' c ne ef h s to c nig P u t h t i h t h
机械电子学-多轴运动控制卡
案例2: 通道1使用差分信号 模拟量指令来控制 电机
3. Clipper运动控制卡硬件介绍
3.4.1 Clipper接口定义
J4 -设备接口(JMACH2) 包含4个通道的设备I/O: 限位输入标志、回零标志、脉冲&方向输出 信号 1. 34针母头扁平电缆连接T&B Ansley P/N 609-3441 2. 标准34线扁平电缆T&B Ansley P/N 17134 3. Phoenix端子型号FLKM 34 (male pins) P/N 22 81 06 3
J4 – 设备端口 (JMACH2)
J10 – 手轮或脉 冲/方向端口 (JHW/PD)
J9 – 通用数字输入 输出端口(JOPT)
3. Clipper运动控制卡硬件介绍
3.4.1 Clipper接口定义
J2 -串口(JRS232) 该接口可以使PMAC与上位机通过RS-232端口 进行通讯,Delta Tau提供了Acc-3L电缆将 PMAC接口转为DB-9端子。 1. 10针母头扁平电缆接口T&B Ansley P/N 609-1041 2. 标准10线扁平电缆T&B Ansley P/N 171-10
2. 运动控制卡简介
2.3 PMAC 运动控制卡
PMAC PCI系列(PMAC1, PMAC2)
2. 运动控制卡简介
2.3 PMAC 运动控制卡
PMAC PC104系列(PMAC2A-PC/104)
2. 运动控制卡简介
2.3 PMAC 运动控制卡
Clipper系列
3. Clipper运动控制卡硬件介绍
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录 PMAC控制卡学习(硬件) ............................................................................................................ 2 第一章 PMAC简介 .......................................................................................................................... 2 1.1 PMAC的含义和特点 .......................................................................................................... 2 1.2 PMAC的分类及区别 .......................................................................................................... 2 1.2.1 PMAC的分类 ........................................................................................................... 2 1.2.2 PMAC 1型卡与2型卡的主要区别 ........................................................................ 2 第二章Turbo PMAC Clipper控制器硬件配置 ................................................................................ 3 2.1 Turbo PMAC Clipper控制器简介 ....................................................................................... 3 2.2 Turbo PMAC Clipper硬件配置 ........................................................................................... 3 2.2.1 Turbo PMAC Clipper硬件标准配置为: ................................................................ 3 2.2.2 Turbo PMAC Clipper控制器可选附件 .................................................................... 6 2.2.2.1 轴接口板 ............................................................................................................ 6 2.2.2.2 反馈接口板 ........................................................................................................ 6 2.2.2.3 数字I/O接口板 ................................................................................................ 7 第三章 Turbo PMAC Clipper设备连接 ........................................................................................... 7 3.1 板卡安装............................................................................................................................ 7 3.2 控制卡供电 ........................................................................................................................ 7 3.2.1 数字电源供电 ......................................................................................................... 7 3.2.2 DAC(数字/模拟转换) 输出电路供电 ................................................................ 7 3.2.3 标志位供电 ............................................................................................................. 8 3.3 限位及回零开关 ................................................................................................................ 8 3.3.1 限位类型 ................................................................................................................. 8 3.3.2 回零开关 ................................................................................................................. 8 3.4电机信号连接 ..................................................................................................................... 8 3.4.1增量式编码器连接 .................................................................................................. 8 3.4.2 DAC 输出信号 ......................................................................................................... 9 3.4.3 脉冲&方向(步进)驱动 .................................................................................... 10 3.4.4 放大器使能信号(AENAn/DIRn) ............................................................................ 10 3.4.5 放大器错误信号(FAULT-) ..................................................................................... 10 3.4.6 可选模拟量输入 ................................................................................................... 11 3.4.7 位置比较输出 ....................................................................................................... 11 3.4.8 串行接口(JRS232) ................................................................................................. 11 3.5 设备连接示例 .................................................................................................................. 11 3.6 接口及指示灯定义 .......................................................................................................... 13 3.7 跳线定义.......................................................................................................................... 15 3.8 Turbo PMAC Clipper端口布置及控制结构图 ................................................................. 19 附件 ................................................................................................................................................ 21 1.接口各针脚定义 ................................................................................................................... 21 2. 电路板尺寸及孔位置 ........................................................................................................ 30