基于DSP的多轴运动控制卡
一种基于DSP和CPLD的运动控制卡的设计
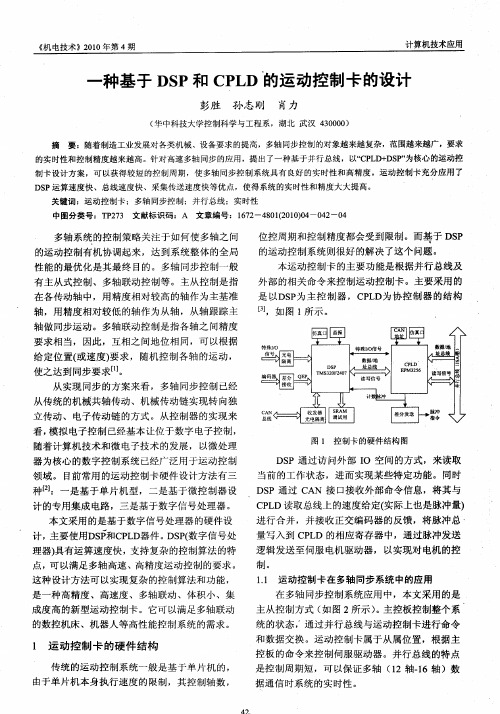
要 发送 的 脉冲 总数 存 入到 C L 的 寄存器 中,每 PD 周 期进 行 累加 ,采用 累 加器 的进 位 信号 作 为脉 冲 序 列 的来源 , 行 处理 ,得 到 驱动器 的指令 脉冲 。 进
1 运 动 控 制 卡 的硬 件 结 构
传统 的运动 控 制系统 一般 是基 于单 片机 的,
由于单片 机本 身执行 速度 的限制 ,其控 制轴 数 ,
4,
计算机技术应用
《 电技术》2 1 机 0 0年第 4期
以将 数 据 锁存  ̄ C L J P D中, 由主控 板 方便 读取 。 总线 收 发器 采用 7 AL CI 4 4 ,在 电路 中 4 V 625
使 之达 到 同步 要求 ¨。 J 从 实现 同步 的方案 来看 , 多轴 同步控制 已经 从传 统 的机械 共轴 传动 、机械 传动 链 实现转 向独 立传 动 、 电子传 动 链 的方式 。从控 制器 的实现 来 看, 模拟 电子控 制 已经基本 让位 于数字 电子控 制 , 随着 计算机 技术 和微 电子 技术 的发展 , 以微处 理 器为 核心 的数字 控制 系统 已经广 泛用 于运 动控 制 领域 。 目前 常用 的运 动控制 卡硬 件设 计方 法有 三
关 键 词 :运 动控 制卡 ; 多轴 同步 控 制 ; 并 行 总 线 ; 实 时性
中图分类号:T 2 3 文献标识码:A 文章编 号:17 —4 0 (0 00 —02 4 P 7 62 8 12 1)4 4 —0
多轴 系统 的控 制策 略关注 于 如何使 多轴 之 间 的运 动控 制有 机协 调起 来 ,达 到 系统整 体 的全局 性 能 的最优 化 是其最 终 目的。多轴 同步 控制 一般 有主 从式控 制 、多轴 联动 控制 等 。主从 控制 是指
基于DSP和FPGA的多轴步进电机驱动控制板卡

电子技术• Electronic Technology96 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】步进电机 伺服控制 FPGA DSP1 技术现状在多轴步进电机伺服控制领域,目前其硬件构架主要有五类:(1)MCU/DSP + 单步进电机驱动器;(2)MCU/DSP+三轴/六轴步进电机驱动器+单步进电机驱动器;(3)FPGA+单步进电机驱动器;(4)PLC+单步进电机驱动器;(5)DSP 与FPGA+单步进电机驱动器对于第一类,虽然能够同时实现简单的多轴步进电机的伺服控制,但对于复杂的伺服控制系统,如系统中需要接入惯性测量、双北斗定位定向和上位机等各种串行信号和开关信号下,硬件系统外部接口不足;对于第二类,除了存在第一类的外部接口不足问题外,还因为需要一个三轴/六轴步进电机驱动器作为中转,整个控制系统的实时性无法得到保障;对于第三类,在同时满足系统对外的接口能力和系统的解算和存储能力的情况下,对FPGA 的要求较高,使得硬件系统成本升高。
另外目前FPGA 对电机控制领域的支持不如MCU 或DSP 完善,使得采用纯FPGA 作为核心处理器的硬件系统的软件编程较为复杂;对于第四类,由于环境适应性问题,一般无法满足在军工和航空航天上的应用;对于第五类,DSP 和FPGA 的控制板卡和单步进电机驱动器,对于多步进电机伺服控制系统,系统硬件较为分散,硬件体积大,成本较高。
2 硬件技术方案基于DSP 和FPGA 的多轴步进电机驱动控制板卡硬件主要包括四个部分:电源部分、DSP 与FPGA 部分、接口电路部分和步进电机驱动部分。
如图1所示。
2.1 电源部分系统外部输入直流电源的电压范围为19V 到59V ,通过TRACO 公司的THN 15WI 系列的DC/DC 转换模块将电压转换为5V 。
5V 电压到3.3V 、1.9V 、1.2采用TI 的可调电压转换模块PTH05000WAH 。
基于DSP技术的多轴运动控制器的应用研究

断周期 ( 高达 Iv ) O S 内完成 , 而克服 了传统 的并 行结 从
基金项 目: 广东省重点学科(9 0 1资助 9 20 )
20 年 幂3 0 2 3
维普资讯
倍频 , 这样可 以有效 地提 高步 进 电机 和光 电编码 器 的电机 , 现 实
Th ee c i m u t — a i to o r le a e n DSP e rs ar h O l li xs mo i n c nto lrb s d o
GAO J ri CHE e DENG Z mi g L a g ud N W i e n IF n
维普资讯
基于 D P技术的多轴运动控制器的应用研究 S
高军礼 陈 玮 邓则 名 李 芳
广 东 工 业 大 学 自动 化 学 院 , 东 广 州 5 0 9 广 10 0
摘要: 本文介 绍了利用基 于 D P技 术的 多轴运 动控 制器作为 下住机 , C机 作为 上位机 所构成 的主从式 S P
裕度和相 位裕 度 , 、、 P ID参数则 通 过离 线调试 完成设
定。
转速 控 制 。D P控 制器 的 I0通 道 则 用来实 现 数 控 S / 铣床 的其 它辅助功能 , 比如 、 z轴行程 限位 、 y、 工作 台 台 灯 、 却 、 滑 等。 该 系 统 脉 冲 当 量 为 0 冷 润 . 0 7 mi, 0 5 t 理论最高 直线位移速度为 1m rn( t 5 / i 受所用 a 电机 、 驱动器 、 机械部件 等影 响) 。
速、 高精度 和多轴 同步 运动 控制 等方 面存在 着 难 以逾 越 的技术瓶 颈 :为此我们采用 了深圳摩信科技 有限公
司基于 D P技 术 的多 轴运 动控 制器 MC 8 0 F ( S T 0 0 4 插 在P c机 I A插槽 中) 以 P S 配 C机组成 了主从式 数控系 统, 以实现立 式 数控 铣 床 的功能 。该控 制 器可 提 供 2
基于USB和DSP的多轴运动控制卡开发
Ab t a t T e mu t l sr c : h l p e—a i moi n c n r lc r a e n US 2 0 tc n lg a e in d f r r a i xs t o t a d b s d o B . e h oo y w s d sg e o e l—t o o i me
基 于 U B和 D P的 多轴 运 动 控 制 卡 开 发 S S
许家 忠, 肖永 强, 尤 波 , 丁 亮
( 哈尔 滨理工大学 自动化学 院, 黑龙江 哈尔滨 10 8 ) 50 0
摘
要 :为 实现 实时数 据传 输 和 简便 的接 口连接 , 计 了基 于 U B . 设 S 2 0技 术 的 多轴 运 动控 制
满足 运动控 制 的要 求.
关键词 : S D P U B; S ;运动 控制 器;C L PD
中图分 类 号 : M 7 T 23
文献标 识码 : A
文章编 号 :10 - 63 20 )5 0 5 — 4 07 2 8 (0 6 0 — 0 5 0
Re e r h a d De eo me to lpe— a i t s a c n v lp n fMut l — xs Mo i i on
d t r n miso n i l n o v n e tc n e t n.I h y tm ,t e DS aa ta s s in a d smp e a d c n e in o n ci o n t e s se h P TMS 2 _ 2 0 h p i h e 3 01v 4 7 c i st e c n— a ta r c s ig u i a d CPLD s u e o d a t rp e a far ,wh c i lfe h tu t r f te c n o r p o e sn n t n l i s d t e lwi pe h r lafi h i s i h smp i s t e sr c u e o h o t l i r c r .Th spa e e c b st e ha d r tu t r n o t r e f n t n o h t n c n o a d.I sprv d b ad i p rd s r e r wa e sr c u e a d s fwa u c i ft e mo i o t lc r i h o o r ti o e y h x r n h tte c n r lc r a o d ra t e e pe me tta h o to a d h s g o e l—t ro ma c a d sa ii i i pe r n e n tb lt me f y,wh c a e h e ie i h c n me tt e rqur — me t fmoin c n r 1 n s o t o to . o Ke y wor : B;DS ds US P;mo in c n o r t o t  ̄e ;CP o r LD
基于DSP运动控制卡的研究与开发
南京航空航天大学硕士学位论文摘要运动控制技术是推动新的技术革命和新的产业革命的关键技术。
近年来,随着运动控制技术的不断进步,运动控制器作为一个独立的工业自动化控制类产品,已被广泛应用于越来越多的产业领域,并形成引人瞩目的市场规模。
目前,以DSP为核心的运动控制卡已成为运动控制器的发展主流,它可方便地以插卡形式嵌入PC机,将PC机强大的信息处理能力和开放式特点与运动控制卡的运动控制能力相结合,具有信息处理能力强、开放程度高、运动控制方便、通用性好的特点。
本文通过对国内外几种典型运动控制卡的结构和功能进行全面分析,研究、开发出一款以DSP为主控单元、基于PCI总线的运动控制卡。
提出了运动控制卡的硬件总体设计方案,采用32位定点DSP TMS320F2812作为控制核心、专用接口芯片PCI9052实现PCI总线接口、CPLD进行译码;同时,对控制卡的各功能模块如DSP最小系统、DSP与PC机之间的接口电路、数字I/O电路、模拟量输出电路等实现方法进行了详细讨论。
研究了运动控制卡的驱动程序开发方法,采用Windriver设计开发了控制卡的驱动程序;并采用模块化程序设计方法,完成了DSP主控程序设计,包括DSP 初始化模块、与PC机的通信模块以及运动控制卡各功能的测试模块。
关键词:运动控制,DSP,PCI,CPLD,WindriverI基于DSP运动控制卡的研究与开发IIAbstractMotion control is a key technology in promoting new product innovation andindustrial revolution. With the progress of motion control technology, it has been widely used in many industrial automation products in recent years, and forms a remarkable market. Now, motion control cards with DSP as the core are becoming the main trend of motion control. They can easily be plugged-in PC to combine the information processing capabilities of PC with the motion control capabilities of motion control cards, which have the advantages of powerful information processing capability, strong motion control ability and good openness.By analyzing the structure and functions of several typical motion control cards, a motion control card using DSP and PCI interface is developed.The hardware frame of our motion control card is designed. 32-bit fixed-point DSP TMS320F2812 is used as the controlling core, and PCI bus interface is realized by using PCI9052, a CPLD is used as logic circuit. The design method of the functional modules of the control card are discussed in detail, such as the minimum system of DSP,the interface of DSP and PC,the digital I/O circuit and the analog export circuit.The driver of the motion control card is developed by Windriver. The program of DSP including the initialization,the communications with PC and the test of functional modules of the card is designed by modular programming methods.Keyword: Motion control, DSP, PCI, CPLD, Windriver承诺书本人郑重声明:所呈交的学位论文,是本人在导师指导下,独立进行研究工作所取得的成果。
基于DSP-FPGA的多轴运动控制系统设计
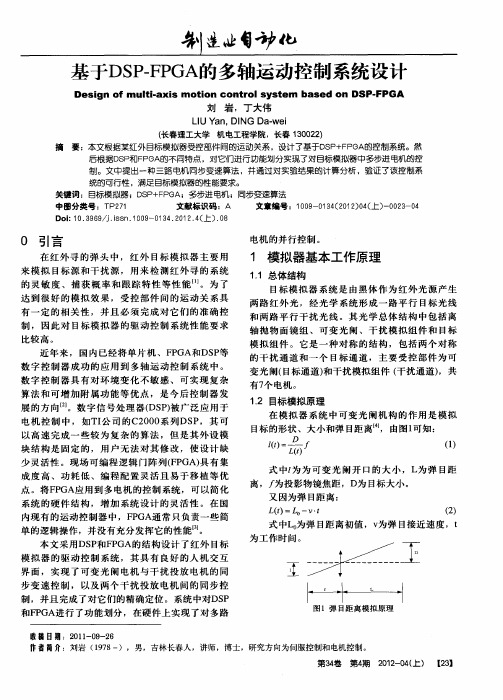
式 中L 为弹 目距 离初值 ,v 弹 目接近 速 度 ,t n 为
为工 作时 间 。
步 变 速 控 制 , 以及 两 个 干 扰 投 放 电机 间 的 同步 控 制 ,并 且 完成 了对 它们 的精 确 定位 。系统 中对DS P 和F G P A进 行 了功能 划 分 ,在硬 件 上 实现 了对 多路
31 同步变速算法 . 可 变 光 阑 电机 在 有 效 工 作 时 间 内运 行 轨 迹 为 不 规 则 的 ,所 以采 用 多份 匀速 运 动 来拟 合 变 速 运
动 。 当弹 目接近 速 度 为v ,可变 光 阑 电机 从 闭合 时 运 行到 最大 尺 寸 时( 模拟 目标 从 初 始位 置 到 终点 ) 即 的 工 作 时 问为 t 设 每 份 匀 速 运动 时 间为 T 与 系 (
目标 模 拟 器 系统 是 由黑 体 作 为 红 外 光 源 产 生 两 路 红 外 光 , 经 光 学 系 统形 成 一 路平 行 目标 光线 和 两 路 平 行干 扰 光 线 。其 光 学 总体 结构 中包 括 离 轴 抛 物 面 镜 组 、 可 变 光 阑 、干 扰模 拟 组 件 和 目标 模 拟 组 件 。它 是 一 种 对称 的 结 构 , 包括 两 个 对 称 的 干 扰通 道 和一 个 目标通 道 , 主要 受控 部 件 为可 变 光 阑( 目标通 道) 干扰 模 拟组 件 ( 和 干扰 通道 ) ,共
数 字 控 制 器 具 有对 环 境 变 化 不 敏 感 、可 实 现 复 杂
算 法 和 可 增 加 附 属功 能 等 优 点 ,是 今 后 控 制 器 发 展 的方 引 。数 字 信 号 处理 器 ( P 被 广 泛 应 用 于 DS ) 电机 控 制 中 , ̄ T 公 司 的C2 0 系 列DS / I I 00 P,其 可 以高 速 完成 一 些较 为 复杂 的 算法 ,但 是 其 外 设 模
CPLD在基于DSP的多轴运动控制卡中的运用
CPLD在基于DSP的多轴运动控制卡中的运用
孙红伟;殷跃红
【期刊名称】《机电一体化》
【年(卷),期】2012()5
【摘要】现代"PC+运动控制卡"型数控技术对运动控制卡的通信速度、插补轴的数目以及对运动控制卡扩展IO的数目有了越来越高的要求。
该文介绍了基于TI公司DSP以及ALTERA公司第二代CPLD高性能伺服运动控制卡的设计,充分利用CPLD的逻辑可编程特性对运动控制卡的功能进行拓展,通过CPLD对控制总线的操作,实现了PC通过ISA总线与运动控制卡通信功能,提高了运动控制卡与PC的通信速度;利用CPLD在其内部实现PWM以及编码器鉴相功能模块,极大地扩展了运动控制卡的最大可插补轴数以及扩展IO的数目,具有很广的应用范围和很强的使用价值。
【总页数】6页(P51-56)
【关键词】PC104;DSP双口RAM;CPLD;Verilog;HDL;PWM;编码器
【作者】孙红伟;殷跃红
【作者单位】上海交通大学机器人研究所
【正文语种】中文
【中图分类】TN911.72
【相关文献】
1.一种基于DSP和CPLD的运动控制卡的设计 [J], 彭胜;孙志刚;肖力
2.基于DSP+CPLD+FPGA的运动控制卡的设计 [J], 王涛;王扶林
3.基于DSP+CPLD的高速高精度PCI运动控制卡 [J], 吴凡;杨小军;曹剑中;刘波
4.基于DSP与CPLD的高性能运动控制卡的设计 [J], 王彦;刘俊杰;游子平
5.基于DSP和CPLD的运动控制卡插补器设计 [J], 劳奇成;王义智;李武
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP和电压反馈的机器人多轴运动控制器的设计
基于DSP和电压反馈的机器人多轴运动控制器的设计
引言
对于控制技术,实时性和稳定性是讨论的重点。
现阶段,机器人控制的主要办法是在离线状态下对步态举行规划,并在主控机上对机器人的运动举行实时的补偿,这种处理办法对处理器的运算速度和处理能力提出了很高的要求。
传统的机器人控制器大多以80C196系列作为处理器,当采纳12MHz晶振时,其状态周期为167ns,机器周期为1ms,不能满足机器人控制的需要。
芯片处理速度可以达到几纳秒,甚至更高,十分适合于机器人控制。
因此,本文选用DSP来代替原有的单片机,同时借助底层反馈技术,设计出一种分布式机器人多轴运动控制器。
控制系统结构与功能
本机器人控制系统结构是一个典型的“PC+运动控制器”模式,其中,主控计算机要求体积小、运算速度快,通常采纳工控机。
主要负责囫囵系统的在线运动规划、动作级运动控制、语音交互控制、视觉导引控制以及人机交互等功能。
底层控制单元以控制器为核心,采纳电压反馈的方式对各运动轴系举行控制,详细结构1所示。
控制器和主控计算机通过CAN相连。
这种通信方式降低了连线的复杂程度,提高了通信的速度,增加了系统的稳定性。
此外,因为只用两根线举行通信,结构也非常灵便。
控制器是囫囵控制系统的核心,通过接收主控计算机的控制指令对各关节执行轴系举行控制,同时把底层信息反馈给主控计算机,实现大回路反馈,以便于主控计算机协调规划,统一管理。
控制器的控制性能挺直关系到机器人的运动能力,本文特地设计了基于DSP和电压反馈的多轴运动控制器。
控制器设计
机器人的各种运动由各个关节轴系完成,每个轴系具有一个自由度,
第1页共4页。
基于DSP 的PCI 通用运动控制卡的硬件设计-中
基于DSP 的PCI 通用运动控制卡的硬件设计摘要:本文提出了一种基于TMS320F2812 的PCI 总线通用运动控制卡的设计方案。
详细介绍了运动控制卡的硬件结构,并对控制卡的配置进行了深入分析,给出了具体的配置参数。
最后,介绍了板卡驱动程序的设计方法。
采用DSP 和PCI 结合的方式,实现了上下位机的高速通讯,并充分发挥了DSP 强大的运算能力和极高的处理速度,以保证控制卡对实时性和精度的苛刻要求。
1 引言随着DSP 技术的飞速发展,以其为核心的多轴运动控制卡越来越广泛的应用在运动控制系统中。
上位机只需对被控对象实施总体的控制和管理,而位置反馈信号的采集、闭环控制的计算和控制量的输出均由运动控制卡完成,这极大地提高了运算速度和控制响应速度。
本文设计的运动控制卡以TI 公司的32 位定点DSP TMS320F2812 为核心处理器,辅以运动控制器LM628,通过PCI 总线专用接口芯片PCI9052 与上位机通信,实现3 轴(可扩成多轴)伺服电机的控制,完成位置、速度控制以及直线、圆弧插补功能。
本文将对运动控制卡的硬件设计进行详细的介绍。
2 运动控制卡的硬件结构TMS320F2812 是基于TI 公司最新的C28x 内核而设计的。
与其他的处理器相比,其具有如下一些特点:采用低功耗设计,核心电压仅1.8V~1.9V,显著降低了功耗,指令周期可达6.67ns;新增了扩展控制寄存器以实现各种增强功能;多达128K×16 位的Flash 存储器,足够用于存储程序和数据变量;56 个可编程或复用的通用I/O。
LM628 是NSC 公司专为使用增量式编码器作为位置反馈的伺服机构而设计的一种芯片,其集成度高,需要外围部件少,易于调试。
主要特点如下:具有32 位位置、速度和加速度寄存器;带有16 位参数的可编程数字PID 控制器;可编程微分采样间隔;运动过程中可改变速度、预期位置和PID 控制器参数;实时可编程的主机中断。
基于DSP和CPLD的多轴运动控制器的设计与研究的开题报告
基于DSP和CPLD的多轴运动控制器的设计与研究的开题报告一、选题的背景和意义随着现代科技的不断发展,运动控制技术已经成为现代工业生产和科研领域中最为重要的技术之一。
在现代工业中,工业机器人、自动化生产线、医疗设备等都需要进行精准的运动控制,而这些运动控制都需要使用到多轴运动控制器。
一般来说,传统的多轴运动控制器都是使用单片机或者FPGA完成的,但是由于单片机和FPGA的计算能力有限,所以无法满足一些复杂的控制要求。
因此,本文选题基于DSP和CPLD的多轴运动控制器的设计与研究,旨在解决传统多轴运动控制器的局限性。
二、选题的研究内容本文选题的研究内容主要包括以下几个方面:1.多轴运动控制器的系统结构设计:包括硬件和软件两个方面。
硬件方面主要包括完成多轴运动的驱动电路和信号采集电路,软件方面主要包括控制算法的设计和程序实现。
2.DSP的应用和控制算法的设计:本文使用TI 公司的TMS320F2812作为DSP芯片,通过开发DSP程序实现多轴运动控制器的控制算法,包括位置控制、速度控制、加速度控制等。
3.CPLD的应用和控制算法的设计:本文使用ALTERA公司的CPLD 芯片EP2C5Q208C8作为控制器的控制逻辑芯片,通过开发VHDL程序实现控制算法的设计。
4.系统测试和实现:利用所设计的多轴运动控制器进行实际的系统测试,测试多轴运动控制器的性能和控制精度,验证设计的可行性和有效性。
三、选题的研究意义本文选题基于DSP和CPLD的多轴运动控制器的设计和研究,可以有效地提升传统多轴运动控制器的控制能力和速度,从而更好地适应现代工业中多轴运动控制的需求。
同时,本文设计的多轴运动控制器也具有较高的控制精度和实时性,能够应用于医疗设备、自动化控制等领域。
四、研究计划1.前期准备(1个月):对多轴运动控制系统进行研究和调研,了解现有的多轴运动控制器的设计和实现原理,查阅相关文献,熟悉所需的硬件和软件工具。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12
TMS320LF2407A DSP的介绍
DSP(Digital Signal Processor)及DSP的特点 DSP实际上就是一种单片机,是集成高速乘法 器,具有多组内部总线,能够快速进行乘法和 加法运算,适于高速数字信号处理的高速、高 位单片计算机。
DSP具有体积小,功耗小,实时处理迅速, 处理数据量大,处理精度高,性能价格比高 等优点。
13
DSP采用的技术 1.采用Harvard结构或改进Harvard结构 数据总线和程序总线相互独立 2.采用流水线技术 使每条指令基本上 都是单周期指令
14
3.硬件乘法器 4.多处理单元: 硬件乘法器(MUL)、累加 器(ACC)、辅助算术单元(ARAU) 5.特殊的DSP指令: e.g. MACD在一个周期内完成乘法、累 加、数据移动(相当于LT、DMOV、MPபைடு நூலகம்、 APAC四条指令)
8
运动控制卡在开放式数控系统中的位置
伺服电机
伺服电机
9
研究多轴运动控制卡的必要性
基于常规MCU的伺服运动控制器数据计算能力 有限,很难实现多电机系统的高性能复杂控制 目前商品化的DSP运动控制卡不够开放 价格过高
10
国内高校研究运动控制卡的情况 1.华中科技大学 F206 DSP PC-ISA-DSP (2001) 2. 北 航 机 器 人 研 究 所 F240 DSP PC - ISA/RS232-DSP (2002) 3.西安交大 王小椿 、梅雪松 4.山东大学LF2407 DSP PC-USB-DSP运动 控制卡 (2003) 5.洛阳工学院 基于专用运动控制芯片LM628 的板卡 (2002) 6.上海交通大学 8254,8255等芯片
(3)全软件CNC型
5
操作台
专用 总线
通用PC互 换器
将PC装入到CNC 内部,PC与CNC 之间用专用的总 线连接
6
CNC卡
PCI/ISA
插补运算、刀具 补偿、位置控制 、速度处理等实 时控制
系统监控管理、系 统故障诊断、界面 显示和数控代码编 译等非实时处理
7
接口卡
CNC的全部功能(如编译、解释、插 补和PLC等)均由软件模块来实现
15
TMS320C2000系列DSP
16
TMS320LF2407A
17
18
DSP的编程
CC(code composer)或CCS(code composer studio) 汇编或者C 汇编:.cmd,.h,.asm .out
C:
.cmd,.h,.c,rts2xx.lib
19
多轴运动控制卡的功能分析
基于DSP的多轴运动控制卡的研究
李因鹏 2004.4.2 西安交通大学工程训练中心
1
报告内容
多轴运动控制卡的研究背景 TMS320LF2407A DSP的介绍
多轴运动控制卡的功能分析
目前的进展及展望
2
多轴运动控制卡的研究背景
开放式数控的产生 (1)目前CNC大都采用封闭式结构。 (2)控制器功能与机床功能不匹配。 (3)用的硬件结构也限制了系统的本身的持续 开发,更新换代慢,不利于数控产品的技术进 步。 (4)数控系统的这一现状已不能适应当今制造 业市场变化频繁,竞争加剧的形势。
3
开放式数控的特点 (1)互操作性 :提供一个统一标准的通讯系统 来实现各模块间的数据交换 (2)可移值性 :应用程序可在不同的平台上运 行 (3)伸缩性 :可根据需要裁剪各功能模块 (4)可交换性 :可根据需要互换功能模块
4
开放式数控系统的实现途径
(1) PC嵌入CNC型
(2) NC嵌入PC型
25
系统硬件结构框图
26
目前的进展及展望
熟悉DSP的硬件资源和编程
完成DSP的功能分析 初步实现DIO,SCI,CAN,AD,脉冲
输出等功能
27
下一步工作安排:
对数控车床进行详细的功能分析 完成DSP多轴运动控制卡的硬件设计 实现插补和速度控制等功能
28
谢 谢 大 家!
处理流程:对端口进行扫描并输入采样值, 程序根据不同的采样值执行相应 的用户程序,然后再把输出值刷 新到端口。三个步骤反复循环。
23
编码器输入
由CPLD来实现码盘信号的四倍频及辨向, 然后发送给DSP,由DSP转发给DPRAM,由 ARM查询相应的DPRAM空间来读取数据 机床参数的采集 在线机床信息: 操作方式、主轴转速、进给速度、主轴转向等 加工程序信息: 当前工件号、当前工序号、当前加工程序号、 当前加工程序段号 刀具信息: 当前刀具名、当前刀具号、刀具进给量、刀具 切削速度等
与上位机的通讯
电机的控制 数字量输入输出控制
编码器输入
机床参数的采集
插补运算
20
与上位机的通讯 主要实现: 1. 数据下发: 加工数据 机床操作控制命令(手动) 2. 数据上传: 机床的状态参数等
接口形式:
DPRAM(双口RAM)、串口和 CAN(调试用)以及USB(备用)
21
电机的控制
根据插补所得的数据驱动电机,使工作台以一 定的速度运动到要求的位置。 控制方式: 脉冲方式: 脉冲+方向(Pulse/Dir)或正负脉冲(CW/CCW)
电压方式:
22
数字量输入输出控制 输入量:机床零点输入、限位输入、减速输 入和刀位输入等 输出量:换刀电机控制、功放、润滑、冷却、 主轴正转、主轴反转、主轴停止和 主轴刹车等
24
插补运算 数控系统根据输入的基本数据,通过计算,将 工 件轮廓的形状描述出来,边计算边根据计算 结果向各坐标轴发送进给指令。
粗插补: 在给定起始刀位点和终止刀位点的连线 之间插入若干个刀位点,即对于每一个运动坐 标来说,用若干微小的位移来逼近 。 精插补: 在粗插补算出的每一微小位移上再做 “数据点的密化“工作
29