3相永磁无刷直流电机(PM BLDC)电机低功耗的驱动
无刷直流电机控制系统设计与实现
无刷直流电机控制系统设计与实现一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效率、低噪音、长寿命等优点,在电动工具、航空航天、汽车电子、家用电器等多个领域得到了广泛应用。
然而,要实现无刷直流电机的高效、稳定运行,离不开先进且可靠的控制系统。
本文旨在对无刷直流电机控制系统的设计与实现进行深入探讨,分析控制策略、硬件构成和软件编程,并结合实例,详细阐述控制系统在实际应用中的表现与优化方向。
通过本文的研究,希望能够为相关领域的学者和工程师提供有价值的参考,推动无刷直流电机控制系统技术的进一步发展和应用。
二、无刷直流电机基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器代替传统机械换向器的直流电机。
其基本工作原理与传统的直流电机相似,即利用磁场与电流之间的相互作用产生转矩,从而实现电机的旋转。
但与传统直流电机不同的是,无刷直流电机在结构上取消了碳刷和换向器,采用电子换向技术,通过电子控制器对电机内部的绕组进行通电控制,从而实现电机的旋转。
无刷直流电机通常由定子、转子、电子控制器和位置传感器等部分组成。
定子由铁芯和绕组组成,负责产生磁场;转子则是由永磁体或电磁铁构成,负责在磁场中受力旋转。
电子控制器是无刷直流电机的核心部分,它根据位置传感器提供的转子位置信息,控制电机绕组的通电顺序和通电时间,从而实现电机的连续旋转。
位置传感器则负责检测转子的位置,为电子控制器提供反馈信号。
在无刷直流电机的工作过程中,当电机绕组通电时,会在定子中产生一个旋转磁场。
由于转子上的永磁体或电磁铁与定子磁场之间存在相互作用力,转子会在定子磁场的作用下开始旋转。
当转子旋转到一定位置时,位置传感器会向电子控制器发送信号,电子控制器根据接收到的信号控制电机绕组的通电顺序和通电时间,使定子磁场的方向发生变化,从而驱动转子继续旋转。
永磁无刷直流电机及其控制

永磁无刷直流电机及其控制一、本文概述永磁无刷直流电机(Permanent Magnet Brushless DC Motor,简称BLDC)是一种结合了直流电机与无刷电机优点的先进电机技术。
本文将对永磁无刷直流电机及其控制技术进行详细的阐述和探讨。
我们将概述永磁无刷直流电机的基本原理和结构特点,包括其与传统直流电机的区别,以及为何在现代工业和家用电器等领域得到广泛应用。
接着,我们将深入探讨永磁无刷直流电机的控制策略,包括位置传感器控制、无位置传感器控制以及先进的电子控制技术,如微处理器和功率电子器件的应用。
我们还将分析永磁无刷直流电机的性能优化和故障诊断技术,以提高其运行效率和可靠性。
我们将展望永磁无刷直流电机及其控制技术的发展趋势,并探讨其在未来可持续能源和智能制造等领域的应用前景。
通过本文的阐述,读者可以对永磁无刷直流电机及其控制技术有更为全面和深入的理解。
二、永磁无刷直流电机的基本原理永磁无刷直流电机(Permanent Magnet Brushless DC Motor,简称BLDC)是一种结合了直流电机与无刷电机优点的电机类型。
其基本原理主要依赖于磁场与电流之间的相互作用,以及电子换向器的无刷换向技术。
磁场与电流相互作用:永磁无刷直流电机中,永磁体(通常是稀土永磁材料)被用来产生恒定的磁场。
当电流通过电机的电枢(也称为线圈或绕组)时,电枢会产生一个电磁场。
这个电磁场与永磁体的磁场相互作用,导致电机转子的旋转。
无刷换向技术:与传统的有刷直流电机不同,永磁无刷直流电机使用电子换向器代替了机械换向器。
电子换向器通过控制电流在电枢中的流动方向,实现了电机的无刷换向。
这种技术不仅提高了电机的效率,还降低了维护成本和噪音。
控制策略:为了精确控制电机的转速和方向,永磁无刷直流电机通常与电子速度控制器(ESC)一起使用。
电子速度控制器可以根据输入信号(如PWM信号)调整电枢中的电流大小和方向,从而实现对电机转速和方向的精确控制。
三相直流电机 pwm驱动原理

三相直流电机 pwm驱动原理三相直流电机(BLDC)是一种无刷电机,它采用三相交流电源和电子换向器来提供电机转子的转子,以实现高效率和高控制性能。
其中,PWM(Pulse Width Modulation)驱动是一种常见的驱动方式,它通过调整电机供电的脉冲宽度及频率来实现对电机速度和转矩的精确控制。
BLDC电机的架构包括定子和转子。
定子是由三个线圈组成的,每个线圈与电源相连,形成一个三相交流电源。
转子则是由永磁体组成的,它被安装在电机轴上,并通过电机驱动器进行驱动。
电机驱动器通过检测转子位置并适时地触发相应的线圈,以产生恰当的磁场来推动转子的运动。
PWM驱动是通过调整电机供电的脉冲宽度及频率来控制电机转速和转矩的方法。
具体实现上,PWM驱动使用电子开关(如晶体管或MOSFET)来控制电机驱动器的输入电流和电压。
通过调整电子开关的开关周期和占空比,可以改变电机驱动器输入电流的平均值,从而控制电机的运行状态。
在PWM驱动中,电子开关以固定的频率切换开关状态,通过开关控制电流向电机驱动器的输送和截断。
开关周期就是每个切换周期的时间。
占空比则是脉冲开启时间与开关周期之比。
占空比越大,表示开启时间越长,电流平均值越大;反之,占空比越小,电流平均值越小。
对于三相直流电机,每个线圈的电流都是通过PWM驱动进行控制的。
换向控制是通过在三个线圈之间循环切换来实现的。
即在每个PWM 周期内,电机驱动器按顺时针或逆时针的方式依次激活线圈。
在每个激活线圈的时间段内,电流被加载到该线圈上,形成一个可变磁场,推动转子运动。
在PWM驱动中,控制电机的转速和转矩的关键是调整占空比。
通过增加或减小占空比,可以改变电机驱动器输入电流的平均值,从而控制电机的输出功率。
此外,调整PWM的频率也可以影响电机的性能。
通常情况下,增加PWM频率能够减小电机的转矩波动和噪声,提高系统的响应速度和效率。
总结起来,PWM驱动是一种通过调整电机供电的脉冲宽度及频率来精确控制电机转速和转矩的方法。
直流无刷电机驱动器BLDC图形图像
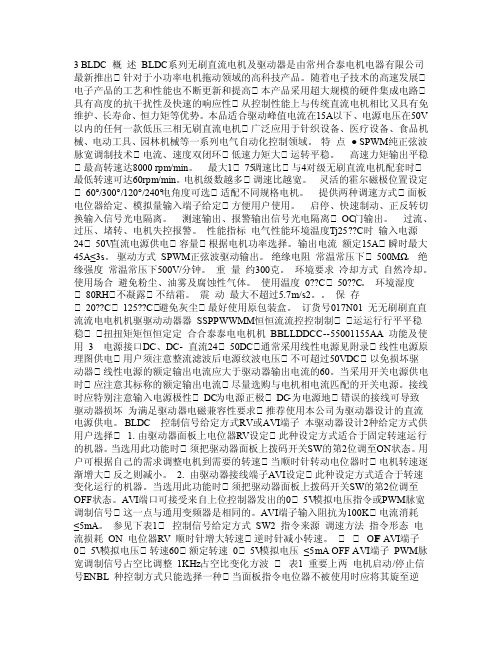
3 BLDC 概述BLDC系列无刷直流电机及驱动器是由常州合泰电机电器有限公司最新推出 针对于小功率电机拖动领域的高科技产品。
随着电子技术的高速发展 电子产品的工艺和性能也不断更新和提高 本产品采用超大规模的硬件集成电路 具有高度的抗干扰性及快速的响应性 从控制性能上与传统直流电机相比又具有免维护、长寿命、恒力矩等优势。
本品适合驱动峰值电流在15A以下、电源电压在50V 以内的任何一款低压三相无刷直流电机 广泛应用于针织设备、医疗设备、食品机械、电动工具、园林机械等一系列电气自动化控制领域。
特点● SPWM纯正弦波脉宽调制技术 电流、速度双闭环 低速力矩大 运转平稳。
高速力矩输出平稳 最高转速达8000 rpm/min。
最大1 75调速比 与4对级无刷直流电机配套时 最低转速可达60rpm/min。
电机级数越多 调速比越宽。
灵活的霍尔磁极位置设定 60°/300°/120°/240°电角度可选 适配不同规格电机。
提供两种调速方式 面板电位器给定、模拟量输入端子给定 方便用户使用。
启停、快速制动、正反转切换输入信号光电隔离。
测速输出、报警输出信号光电隔离 OC门输出。
过流、过压、堵转、电机失控报警。
性能指标电气性能环境温度Tj25??C时输入电源24 50V直流电源供电 容量 根据电机功率选择。
输出电流额定15A 瞬时最大45A≤3s。
驱动方式SPWM正弦波驱动输出。
绝缘电阻常温常压下 500MΩ。
绝缘强度常温常压下500V/分钟。
重量约300克。
环境要求冷却方式自然冷却。
使用场合避免粉尘、油雾及腐蚀性气体。
使用温度0??C 50??C。
环境湿度80RH 不凝露 不结霜。
震动最大不超过5.7m/s2。
保存20??C 125??C 避免灰尘 最好使用原包装盒。
订货号017N01 无无刷刷直直流流电电机机驱驱动动器器SSPPWWMM恒恒流流控控制制 运运行行平平稳稳 扭扭矩矩恒恒定定合合泰泰电电机机BBLLDDCC--55001155AA 功能及使用 3 电源接口DC、DC- 直流24 50DC 通常采用线性电源见附录 线性电源原理图供电 用户须注意整流滤波后电源纹波电压 不可超过50VDC 以免损坏驱动器 线性电源的额定输出电流应大于驱动器输出电流的60。
Freescale 3-PHASELV-KIT 三相BLDC PMSM低压电机控制开发套件说明书

3PHASELV-KITMotor Control3-phase BLDC/PMSM Low Voltage Motor Control Kit Fact SheetDescriptionThe urgent need to offer a final solution within a short delivery time to the market leads developers to optimalize and speed up the whole development process. Fast prototyping and fast development are essentialrequirements for success. The area of motor control needs to meet these requirements as well. Therefore, Freescale provides the hardware, software, tools and knowledge-based support for motor control applications. The 3-ph Low Voltage Motor Control Kit represents a platform for motor control application development. This modular system enables the fast development of sensor / sensorless BLDC and PMSM motorapplications using different controllers, starting with the HCS08, the DSC, and up to the ColdFire family. Moreover, easy porting from one controller to another, with motor control libraries support and the FreeMASTER development tool, significantly contributes towards finalization of the development far earlier than ever before. This motor control kit is also suitable for those who want to easily learn and develop their first motor control application soon, verify existing motor control techniques, or to implement a new one.Target applications•BLDC motor •PMSM motor •DC motor•Automotive applications •Motor control applicationsProduct Features and Specifications•3-ph BLDC/PMSM Low Voltage Motor Control Drive board •MC56F8006 daughter board •MC9S08MP16 daughter board •40W BLDC motor •24V / 3A power supply• 2 CDs with datasheets, reference manuals, source codes and much more •user interface / FreeMASTER •3-ph MOSFET bridge inverter •3-ph MOSFET gate driver (MC33937)• d.c.-bus voltage and current sensing •BEMF voltage sensing •phase current sensing •Encoder/Hall sensor sensing •CAN physical layer•USB interface (MC9S08JM60) for FreeMASTER •LED indicatorsFreescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2006 / Document Number: xxxxxREV 0Learn More:For current information about Freescaleproducts and documentation, please visit.The 3-ph BLDC/PMSM Low Voltage Motor Control Drive board incorporates all the necessary circuitry needed for development of motor control applications. It incorporates a complete 3-phase power stage, a communication interface, feedback signal handling and the user’s interface. All the control, feedback and communication signals are routed to the MCU header connectors. The MCU header incorporates the main MCU controlling the system. The MCU headers can be easily changed to another with a different microcontroller. This modular approach allows for easily porting an application among different controllers. The MC9S08MP16 and MC56F8006 MCU headers are included in the Motor Control Kit.Two BLDC sensorless applications are provided for the attached controllers. Detailed designer reference manuals ( DRM108 and DRM 117) and source codes are included as well. Applications are already loaded in the controllers and are up and running as soon as a power supply is applied. The BLDC sensorless applications can be controlled using the push buttons and toggle switch, or by using FreeMASTER control pages. The 3-ph BLDC/PMSM Low Voltage Motor Control Drive board is then connected to the host PC via the USB cable.This kit is ready to order on the freescale website , under 3PHASELV-KIT.3PHASELV-KIT。
BLDC和PMSM电机的构造及驱动方案介绍

BLDC和PMSM电机的构造及驱动方案介绍无刷直流(BLDC)和永磁同步电机(PMSM)现在在许多应用中受到青睐,但运行它们的控制软件可能难以实现。
恩智浦的Kinetis电机套件弥补了与嵌入式控制软件和直观GUI的差距,最大限度地降低了软件的复杂性并加快了开发过程。
本文将简要介绍BLDC和PMSM电机的构造和关键操作参数,然后介绍如何驱动它们。
然后,它将讨论软件为何复杂,如何管理以及一些硬件选项。
然后,它将研究如何使用恩智浦的Kinetis电机套件启动和运行项目。
三相无刷直流电机(BLDC)及其近似同类电机,永磁同步电机(PMSM)已成为在过去十年中,由于其控制电子设备的成本急剧下降,新的控制算法激增,因此在过去的十年中,工业领域也越来BLDC电机具有高可靠性,高效率和高功率体积比。
它们可以高速运行(大于10,000 rpm),具有低转子惯量,允许快速加速,减速和快速反向,并具有高功率密度,将大量扭矩包装成紧凑的尺寸。
今天,它们被用于任何数量的应用,包括风扇,泵,真空吸尘器,四轴转换器和医疗设备,仅举几例。
PMSM与带有绕线定子和永磁转子的BLDC具有相似的结构,但定子结构和绕组更类似于AC感应电机,在气隙中产生正弦磁通密度。
PMSM与施加的三相交流电压同步运行,并且具有比交流感应电动机更高的功率密度,因为没有定子功率用于感应转子中的磁场。
今天的设计也更强大,同时具有更低的质量和惯性矩,使其对工业驱动,牵引应用和电器具有吸引力。
创造驱动器鉴于这些优势,它不是不知道这些电机是如此受欢迎。
然而,没有任何东西没有价格,在这种情况下,驱动和控制电路的复杂性。
消除换向电刷(及其伴随的可靠性问题)使得需要电气换向以产生定子旋转场。
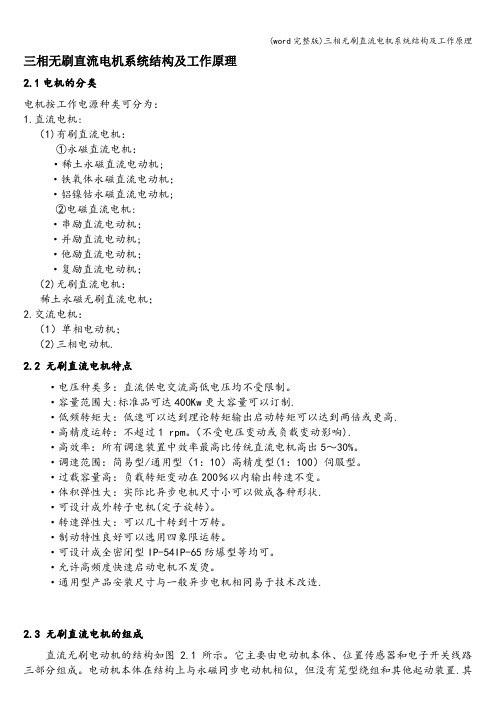
这需要一个功率级(图1)。
图1:三相电机驱动的简化框图。
三个半桥在控制器的指导下切换电机相电流,其输出由前置驱动器放大和电平移位。
(使用Digi-Key方案绘制的图表- 它)。
(word完整版)三相无刷直流电机系统结构及工作原理
三相无刷直流电机系统结构及工作原理2.1电机的分类电机按工作电源种类可分为:1.直流电机:(1)有刷直流电机:①永磁直流电机:·稀土永磁直流电动机;·铁氧体永磁直流电动机;·铝镍钴永磁直流电动机;②电磁直流电机:·串励直流电动机;·并励直流电动机;·他励直流电动机;·复励直流电动机;(2)无刷直流电机:稀土永磁无刷直流电机;2.交流电机:(1)单相电动机;(2)三相电动机.2.2 无刷直流电机特点·电压种类多:直流供电交流高低电压均不受限制。
·容量范围大:标准品可达400Kw更大容量可以订制.·低频转矩大:低速可以达到理论转矩输出启动转矩可以达到两倍或更高.·高精度运转:不超过1 rpm。
(不受电压变动或负载变动影响).·高效率:所有调速装置中效率最高比传统直流电机高出5~30%。
·调速范围:简易型/通用型(1:10)高精度型(1:100)伺服型。
·过载容量高:负载转矩变动在200%以内输出转速不变。
·体积弹性大:实际比异步电机尺寸小可以做成各种形状.·可设计成外转子电机(定子旋转)。
·转速弹性大:可以几十转到十万转。
·制动特性良好可以选用四象限运转。
·可设计成全密闭型IP-54IP-65防爆型等均可。
·允许高频度快速启动电机不发烫。
·通用型产品安装尺寸与一般异步电机相同易于技术改造.2.3 无刷直流电机的组成直流无刷电动机的结构如图2.1所示。
它主要由电动机本体、位置传感器和电子开关线路三部分组成。
电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置.其定子绕组一般制成多相(三相、四相、无相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成.图2.1 直流无刷电动机的结构原理图当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生的转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关电路,从而使定子各相绕组按一定顺序导通,定子相电流随转子位置转子位置的变化而按一定的次序换相。
bldc工作原理

bldc工作原理
BLDC(Brushless DC)电机是一种无刷直流电机,其工作原
理可以简单地描述为电流通过电机的多个线圈,产生一个旋转电场,从而使电机转动。
BLDC电机由三个线圈(通常称为A相、B相和C相)组成,每个线圈连接到一个功率开关或晶体管。
这些开关根据电机旋转的位置和速度,以特定的顺序打开和关闭。
这种特定顺序由电机控制器根据传感器或者反馈信号决定。
BLDC电机可以利用霍尔效应传感器或者反馈设备来确定电机
转子的位置和速度。
它们可以将电机控制器内的电子电路和软件与传感器设备结合使用,以实现电机的精确控制。
BLDC电机的核心是一个永磁转子,其固定在电机的轴上。
在
电机控制器的控制下,线圈的通电与断电导致转子的磁极始终与线圈的不同极性相对应,从而驱动转子旋转。
BLDC电机是由三个线圈依次通电和断电来工作的。
当一个线
圈被通电时,它会产生一个磁场,将转子的磁极吸引到线圈附近。
然后,线圈会被断电,磁场消失,转子会因惯性而继续旋转。
接着,下一个线圈会被通电,重复这个过程,就可以实现连续的旋转。
由于BLDC电机没有刷子和电刷,这意味着它们没有摩擦和
电火花,因此可以实现更高的效率和更长的使用寿命。
此外,BLDC电机具有快速响应和较小的尺寸,适用于许多应用领域,
例如家用电器、工业机械以及电动汽车。
总之,BLDC电机通过控制线圈的通电和断电实现转子的精确驱动,从而实现旋转运动。
它们具有高效率、长寿命和快速响应的优点,被广泛应用于各种领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:本文介绍了用模拟和硬件来实现3相永磁无刷直流电机(PM BLDC)电机低功耗的驱动。
此驱动器系统,是由脉冲宽度调制(PWM)控制的一个120度的六个梯形永磁无刷直流电动机驱动。
处理器使用的是常见的PIC16F877,它不仅能够闪存,而且成本很低。
最重要的是它能够实现和微控制器单元(MCU)的序列换向,旋转方向的控制,速度控制和阅读馆传感器的信号的功能。
为了方便低速,高速之间的控制,系统采用了感应式的控制技术。
本文还介绍了Proteus VSM(虚拟系统建模)软件作为实时仿真功能建模,模拟永磁无刷直流电动机驱动器,然后硬件实施。
先通过预期的结果监测和分析整个虚拟模拟所使用的的所有组件,再用已经证实的实验结果与模拟电路和结果进行对比。
使用Proteus VSM可以缩短产品开发时间,从而降低了工业应用程序的开发成本。
关键词:无刷直流电动机,PWM,PIC16F877,Proteus VSM的,永久磁铁。
一引言永磁同步梯形反电动势机器被称为永磁无刷直流电机。
在结构上,PM BLDC电机是一种(电枢在定子中,永久磁铁在转子中)由内而外的直流电动机。
该电动机的驱动系统包括四个主要部分:一个功率转换器,一个永磁同步机(PMSM)传感器控制算法,一个将直流电源转化为合适的交流驱动电源的三相你变转换器。
因此,它将电能转换成机械能。
其中无刷直流驱动的功能是检测转子的位置,它可以由两个流行的方法来实现:有传感器法和无传感器法。
最简单的方法是通过一个位置传感器得知瞬时整流绕阻电流。
图1展示的是传感器控制的永磁无刷电动机驱动系统。
在无传感器法中,虽然不需要任何位置传感器,但需要一个有大容量程序代码和大容量内存的性能要求较高的处理器。
该方法的明显好处是无传感器,降低了材料成本。
但节约了成本也优缺点,表现如下:该系统基于反电动势的检测,电动机必须在最低限速以上运行才能产生足够的的反电动势。
原因很简单,该程序不适用于低速。
电机负载的突然变化可能会导致反电动势驱动器环路自锁。
根据一些特征,PM电机可以进行分类。
这些特征包括永久磁铁(铁氧体,陶瓷,磁钢或罕见的土),PM的位置,形状的反电动势波形等。
例如,基于反电动势(梯形或正弦)的分类如图2所示。
图2 (a)基于反电动势的梯形波形。
(b)基于反电动势的正弦波形。
对于梯形型,其电枢阶段准方电流必须提供无纹波扭矩操作,同样的道理正弦型需要正弦相位的电枢电流。
高分辨率位置传感器使用时需要正弦反电动势的类型,就像通过知道转子的位置,确定每一个瞬间最佳的操作时间,这会导致硬件和软件设计起来更复杂。
就这个原因,梯形型是更有吸引力的选择,因为其简单,价格较低但效率更高。
用电源逆变器向电源提供三相交流信号到。
该逆变器可一般分为单相逆变器和三相逆变器和使用开关元件的单相,三相逆变器,开关元件有很多种,如BJT,MOSFET,IGBT,MCT和GTO。
对于三相逆变器,两种类型控制信号可以被应用到开关设备:180度导通或120度传导。
本项目采用120度传导的每个晶体管(Q1到Q6)接通为120度,如图3所示。
图3 门相为120度的信号传导在任何时刻,两个电源开关状态为开。
因此,在任何时间间隔内,两个加载端子(Y形连接)被连接到直流供应电源,第三端是开放的。
在这种传导型,将每个功率晶体管120度开启,并会产生准方波电压Van,Vbn和Vcn(图3)。
在传感器控制技术方面,共同使用的传感器是霍尔效应传感器,这是低分辨率传感器,适用于梯形类型。
作为反馈MCU的三个霍尔传感器彼此之间120度出相。
这些传感器将通过磁极的极性提供高或低的输出信号,这表明附近有S极或N极。
每60度,用其中的一个的霍尔传感器过渡,如图4所示。
来自霍尔传感器的信号将被馈送到MCU,以执行电子换向基于内存的序列模式。
该换向机构示于图4。
每个霍尔传感器进行180 度至120度,第二霍尔传感器后开始导通。
通过参照该图中,为了获得恒定的输出扭矩和恒定输出功率,电流通过驱动马达定子卷绕过程中,反电动势是平坦部分波形。
图4霍尔传感器之间反电动势和参考电流之间的关系二六步梯形控制的BLDC高效率变速和可变转矩电机控制,只能通过使用电子元器件和MCU。
因此PM BLDC 电机被视为一个强有力的候选连同它的电机驱动应用比其他电动机廉价的优点。
由PM BLDC电机驱动,怎样使控制方法简单化来弥补其高成本的缺点,已经成为行业主要关注的问题。
出于控制简单的原因,120度的六步控制方法已经非常流行。
在这种控制类型,定子电流的导通,使得仅发生两个阶段的星形连接绕组连接在DC总线和第三绕组的串联打开。
对于可变速度控制的应用,它是适合使用的开环电压模式脉冲全桥逆变器的脉宽调制(PWM)[12]。
调速是通过交替在PWM的占空比,这使得速度控制是非常简单和高效。
占空比可以介于0%至100%用作实现最大转子速度。
在逆变侧,只有两台交换机ON时,在任一时刻的时间内,一台在高侧,另一台在低侧。
在每个60度间隔,将只需要一个阶段到有电流+ I(由+表示,其他的显示为- ),而第三至有一个零电流(打开)。
这些电流满足基尔霍夫电流在星形连接的三相绕组法。
三VSM的变形仿真传统的嵌入式设计行业设立用于实验设备测试程序的快闪记忆体MCU与源代码,调试它,把它设置成可编程开发板,把它旨在测试电路并运行它。
如果发生任何错误,这个过程将反复进行,直到达到设计目标。
这不仅仅MCU本身,同时也为外部电路建立在PCB上。
传统的开发步骤是在图5所示。
这是不可能的设计师完整的设计开发和测试前物理原型的建设[。
为了缩短设计周期,降低成本和风险,BLDC电机系统可以先使用建模和仿真技术,建立其模型。
用这种方式,有效地保存了很多实际的设计时间。
到目前为止,许多研究BLDC 电机驱动只使用Matlab的Simulink仿真平台。
这个强大的软件提供了良好的仿真结果驱动模型,但是当涉及到硬件实现和硬件分析,它就不能模拟的BLDC电机驱动器基于真正的组件的性能和操作。
在研究环境中,低成本还应该包括降低研发成本。
由于在大多数时间内没有任何方法来测试组件的状态和性能,明显需要很长一段时间来进行台柱试验。
对于一个应用程序,它需要一段时间来测试3或4个组件,甚至更多,来实现设计目标。
最坏的情况下,设计师一遍又一遍,需要修改设计失败的PCB电路,从而导致浪费时间和设计成本增加。
在的廉价的工业应用,这些仍然是主要的的因素。
出于这个原因,在开始建设硬件电路之前,本文引入使用的Proteus VSM软件模拟所需的必要组件来完成完整的BLDC电机驱动。
图6显示了Proteus VSM的开发步骤。
用这个软件可能“第一时间”成功实现工作使用的硬件原型。
该软件提供的虚拟编程和单片机调试瞬态分析能力让设计师工作更容易,尤其是当它涉及到MCU circuitbased的设计。
从瞬态分析,最重要的部分是它的源代码编程使MCU正常工作。
Proteus VSM的是一个完全独特的电子软件,它提供了能够使编译器或汇编运行的模拟高低级别的微控制器代码。
同样的原理大规模的组件存储在库中,使其便于设计测试许多合适的元件相同。
它是目前国内唯一的提供全方位的微控制器模型。
基本上有三个主要阶段测试MCU:1建立正确的外部示意图电路连接到MCU;2写程序的源代码,并建立(组装);3将生成代码MCU并运行模拟;文本编辑器的源代码可以写在记事本上,然后作为源代码的MCU将其保存为asm文件。
它可以是编辑使用的源代码编辑器。
通过使用添加/删除源代码文件对话功能,可以浏览并连接到源代码MCU。
MCU将作为其霍尔传感器信号输入产生六步换相序列并产生六个输出端口RC0 RC5。
完整的电路模拟使用虚拟组件。
PROTEUS VSM提供BLDC电机模型中,电机操作可以被看作热烈运行时的模拟。
四模拟结果从瞬态分析图中得到仿真的结果。
通过使用此功能,模拟和数字数据可以在同一时间被检测。
图6示出了霍尔传感器的信号与单片机输出。
有3个PWM信号由单片机产生传到高桥逆变器。
的最重要的输出是分析相电流示于图7,它表示了三相电枢电流。
该电流标记为红色,黄色和蓝色颜色。
图8示出了驱动器的端子电压通过使用数字示波器监视的系统。
该黄色波形是终端电压A相,蓝色波形B相和红色波形C相如图所示,电流波形都被单独体现在图9。
从图中,清楚地看到,目前顺序进行执行的六个换向步骤。
这些结果证明,该内置在Proteus VSM电路进行电的流随意衰减。
所有的电子在该仿真中使用的组件,现在可以转换成硬件建设。
五硬件建设这个阶段是至关重要的,来验证Proteus VSM的模拟。
驱动程序电路由MCU模块,三相逆变器和过流,过热过电压保护电路组成。
这种保护电路将不会在这里讨论。
所有使用的组件是完全一样的相同模拟仿真软件。
由于这个项目引进的Proteus VSM为一体的仿真软件,BLDC电机驱动应用程序的平台,恰巧到了使用这个软件,调试MPLAB IDE程序。
它允许插件在MPLAB IDE的调试器上。
PROTEUS VSMMPLAB观众,捕获Microchip的嵌入式软件开发。
由选择Proteus VSM的调试工具,只是在软件调试模式,现在可以做无ICD2(在线调试器)或发展板。
图10显示了MPLAB IDE窗口由模拟电路,软件调试和输出波形。
通过使用变形VSM为因灾调试,开发板的硬件被排除,从而设计,修改测试的源代码会更容易。
图10Proteus VSM的调试工具MPLAB IDE硬件结果通过泰克TDS3014B四个通道的颜色示波器和Fluke43B电能质量分析仪收集。
示波器是用来查看PWM霍尔传感器信号,而电能质量分析仪用于查看电压和电流端子之间的关系。
图11和图12结果示于端电压和电流的永磁无刷直流电动机驱动器在不同的PWM 占空比周期。
这些电流和电压的结果是非常重要的,因为他们提供了验证设计PMBLDC电机驱动理论和Proteus VSM的使用是否非常可靠。
数据采取了改变占空比的空载和负载条件下的PWM。
它可以是认为被施加到马达的负载扭矩轴,相电流增强了。
这是由于电流与转矩之间的关系成正比。
此外,电流值更大,可见的电流换向波形越明显。
图11 端子的电压和相电流在90%以上的PWM占空比图12 端子的电压和相电流100%的PWM占空比总之,BLDC电机驱动在模拟和模型开发硬件实现的低功耗应用。
本研究调查马达驱动器120度六步换相开关技术的性能。
的控制方法是一种低分辨率传感器等传感器类型霍尔传感器的使用。
用PIC16F877,一个低成本微控制器作为主控制器,其成本低廉,该产品应具有在小功率应用中的商业号召力。
本文引入显示其生产的能力和实用性之前构建的硬件虚拟模型电路。