GPS控制网优化设计质量指标探讨
带状GPS控制网的优化设计探讨
丽
贯 穿 工 程 建 设 的 可 行性 研 究 、 步 设 计 、 初 施 工 测 绘 、 线 施 工 、 工 图 测 绘 等 各 个 阶 管 竣 段 , 管 线 设 计 提 供 中线 两 侧 各 1 0 左 右 为 0米
G S P 基线 向量 解 算 中作 为位 置 基 准 的
固定 点 误 差 是 引 起 基 线 误 差 的 一 个 重 要 因
3长输 管线GS P 网的优化设计
长输 管线 G S 制 网 的 优化 设 计 , 在 P控 是
限 定精 度 、 靠 性 和 费 用 等 质 量标 准 下 , 可 寻
求 网 设 计 的 最 佳 极 值 。 经 典 控 制 网 的 优 与
准。
() 任 何其他起算 数据时 , 采用 网 3无 可
质 量 、 快 作 业 进 度 、 约 工 程 成 本 起 到 加 节
至 关重 要的 作用。
G S 的 基 准 优 化 设计 主 要 是 对 坐 标 G S 的精 度 设计 是 根 据 偶 然 误 差 传播 定 P 网 P 网 未 知 参 数 进 行 设 计 。 准选 取 的 不 同 将 会 律 , 照 一 定 的 精 度 设 计 方 法 , 析 网 中各 基 按 分
1引言
经 被 广 泛 的应 用 在 工 程 建 设 的 各 个 领 域 。
测 绘 资料 。 因此 , 满 足 工 程需 要长 输 管 线 为
位 置基准优 化方案 :
G S 为 一 项 全 新 的测 量 定 位 技 术 已 G S P 作 P 控制 网一 般 沿 线 路 按 点对 布 设 , 成 由 构
对 网的精 度 产生 直 接 影 响 , 中 包括 GPS网 其
未知 点平 差 后 预 期 能达 到 的精 度 。 管道 G S P
浅析 GPS 测量控制网的优化设计研究

浅析 GPS 测量控制网的优化设计研究摘要:随着科学技术的发展,我国的GPS技术有了很大进展,越来越多的工程都在应用GPS来进行布设控制网。
为了确保GPS控制网的经济性、可行性、精确性,弄清GPS控制网的布设原则及优化设计是十分必要的。
本文作者研究了GPS 测量控制网的优化设计的方法。
关键词:GPS;测量控制网;优化设计0、引言GPS控制网布设是开展GPS测量工作的重要基础,勘测技术人员在开展相关工作时,必须严格遵守国家法律法规要求,充分发挥现代科学技术的优势,结合GPS控制网使用群体的实际需求制定布设方案,一方面能够提高点位的精确度,另一方面可以增强控制网的可靠性,对推动相关行业的健康发展具有积极影响。
1、GPS测量技术与GPS控制网测量1.1 GPS测量技术GPS RTK(Real Time Kinematic)技术开始于 90 年代初,是一种全天候、全方位的新型测量系统,称载波相位动态实时差分技术,是目前适时、准确地确定待测点的位置的最佳方式,是基于载波相位观测值基础上的实时动态定位技术。
GPS RTK 具有定位精度高且精度分布均匀,速度快、效率高,观测时间短,方便灵活,测程不受限制,不受通视条件影响等优点。
1.2 GPS控制网测量GPS 控制网网形比较灵活,可以根据实际地理条件,建筑物条件以及相应的测区情况来布设。
连接方式可以为点连式的、边连式的、混连式的、中点多边形等连接方式。
GPS 控制测量点间不要求通视,图形结构灵活,因此选点工作要比传统控制测量的选点简便容易得多。
GPS 点的选定不以相邻点间的通视作为先决条件,给选点带来极大的灵活性,但也有具体的要求。
点位应当保证观测时卫星信号不能受到干扰,选点时做到点位周围视场内最好没有高度角大于 15°的障碍物,尤其是不能有成片的障碍物,远离大功率的无线发射台和高压电线,没有大面积的水域或对电磁波反射(或吸收)的物体。
观测作业的主要任务是捕获 GPS 卫星信号对其进行跟踪、接收和处理,以获取所需的定位和观测数据。
GPS控制网的优化设计

GPS控制网的优化设计摘要:GPS网的优化设计主要归结为基准优化设计和图形结构强度的优化设计,其中图形强度设计包括控制网的精度、网的抗粗差能力和网发现系统误差能力的强度。
本文通过算例分析对控制网精度进行优化处理,证明GPS网精度主要受网中各点出发基线的数目及其权阵的影响,并与观测值权相关甚小。
关键词:GPSGPS网优化设计优化处理Abstract: GPS network optimization design of the main boils down to benchmark optimization design and graphic design optimization of structure strength, including graphic strength design including control of precision, nets of net of gross error ability and nets found the system error the strength of the ability. This article through the analysis of the example to control the nets precision optimized, prove GPS network precision in the mainly by the nets start at baseline and arrays of the right number of influence, and observation and related rights is very small.Keywords: GPS GPS network optimization design optimization引言GPS定位技术具有高效率,高精度,全天候作业,无距离限制,自动化程度高等诸多优点,使得GPS定位技术在测绘,导航,通讯等各个领域得到广泛使用,逐渐取代了传统的大地测量定位方法。
浅谈GPS网型优化设计

浅谈GPS网型优化设计文章主要讨论了GPS控制网的优化设计问题,控制网优化设计的目的就是选出既可满足精度、可靠性要求,又能使整个建网费用最少的设计方案。
因而文章论述了控制网基准优化、可行性分析等方面的理论与方法,介绍了GPS网优化设计的方法和步骤。
标签:GPS;网型优化;网型设计为了解决控制网优化设计问题,得出布网方案、控制网优化设计的方法,论文从控制网优化设计着手,以一个实例来进行阐述。
二、测区概况本项目为某铁路控制网复测,位于四川省凉山彝族自治州,正线长度22.917km。
主要工程为双线特大桥、隧道、四线大桥等其他运营生产设备及附属以及大临工程等。
三、控制网情况(1)根据网形的一部分进行说明。
(2)根据设计院提供的原始控制点A001、A002、A003、A004进行了现场勘察和稳定性评估,经考察控制点稳固可靠。
随后就对设计控制点进行了复测,复测结果满足《工程测量规范》精度要求。
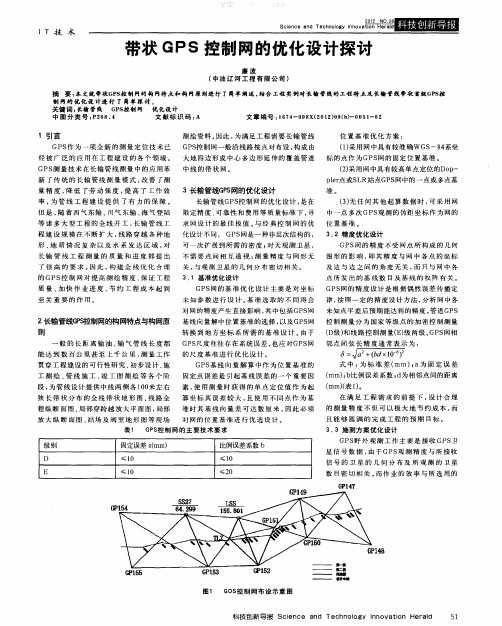
(3)根据现场施工的要求对控制网进行了加密,加密点为8个点:WH01、WH02、WH03、ZX01、ZX02、ZX03、ZX04、ZX05(见图1)。
(4)平面坐标系采用与设计成果相同的独立坐标系统,即WGS84大地坐标系椭球参数。
中央子午线102°45′,投影面大地高1000m。
四、布网方案与网型优化1.GPS控制网网形设计的一般原则在GPS作业前,应设计出一种比较实用的既能满足一定精度和可靠性要求,又有较高精度指标的布网作业计划,这就是GPS网的优化设计问题,因而网形设计的一般原则为:(1)要充分考虑建立GPS控制网的应用范围。
对于工程建设的GPS网,应该既考虑勘测设计阶段的需要,又考虑施工放样等阶段的需要。
(2)采用分级布网方案。
适当地分级布设GPS网,有利于根据测区的近期需要和远期发展分阶段布设,而且可以使全网的结构呈长短边相结合的形式。
(3)GPS网中应不存在自由基线。
所谓自由基线是指不构成闭合图形的基线,由于自由基线不具备发现粗差的能力,因而必须避免出现,也就是GPS网一般应通过独立基线构成闭合图形。
GPS控制网的布设原则及优化设计探讨
GPS控制网的布设原则及优化设计探讨【摘要】GPS控制网的优化设计是实施控制测量的基础性工作,它能保证控制网的精确性、可行性、经济性。
本文总结了GPS控制网的特点以及GPS控制网布设应坚持的原则,同时提出了GPS控制网优化设计的一些措施。
【关键词】GPS控制网;布设原则;优化设计;可靠性;精度1.引言GPS控制网的优化设计是实施控制测量的基础性工作,它能保证控制网的精确性,可行性,经济性。
与传统控制测量方法相比,GPS技术具有点位精度高、观测时间短、操作简便、可全球全天候作业等优点,但并不等于GPS控制网就无需像传统控制测量方法那样进行控制网的优化设计。
由于GPS网的精度与网的几何图形结构无关,且与观测权相关甚小,而影响精度的主要因素是网中各点发出基线的数目及基线的权阵,所以,我们提出GPS控制网优化设计的概念。
2.GPS控制网的特点常规测量中对控制网的网形设计是一项非常重要的工作,而在GPS网形设计时,因GPS同步观测不要求通视,对测站点间相互的边角也没有过高的限定,所以其图形设计具有较大的灵活性。
根据不同的用途,GPS网的图形布设通常有: 点连式、边连式、网连式、边点混连式四种基本方式。
选择什么样的网,要全方位的权衡,主要取决于工程所要求的精度、野外条件、作业工期及工作效率等因素。
GPS控制网在图形设计时需要考虑以下问题:(1)GPS控制点之间可以互相不通视,但我们考虑测量加密时,我们至少要保证控制点在一个方向上可以通视,而且周围仰角十五度内不应该有障碍物,以免阻挡或吸收信号。
(2)在做GPS控制网时,我们要避免自由基线的存在,因为自由基线不具备构成闭合图形,不具备发现粗差的能力,我们要保证有一定量的多余观测数,保证一定量独立设站数或复线基线数,提高网的精确性和可靠性。
(3)要控制闭和环和附和导线条数不宜过多。
两条基线夹角不易过小,以确保检核条件,提高网的可靠性。
3.GPS控制网的布设原则我们在 GPS控制网布设时应考虑以下的问题:(1)尽量减少尺度误差。
关于GPS控制网优化设计的探讨

关于GPS控制网优化设计的探讨1前言众所周知,利用GPS系统实测各种用途的控制网可以达到降低外业劳动强度,提高工作效率,获得较高的相对定位精度和低成本的目的。
为此我们首先应做好GPS网的优化设计,这也是达到此目的的关键。
2 GPS控制网优化设计原则GPS控制网的布设应视其目的,要求的精度,卫星状况,接收机类型和数量,测区已有的资料,测区地形和交通状况综合考虑,即网的设计应在效率性、可靠性、精确性和经济性等方面力图实现用户的要求。
3 选择有利的GPS点位选择合理的GPS点位是进行GPS控制网测量的一个必不可少的先决条件,GPS点位选择得恰当与否将直接影响到GPS测量的精度、费用和下级测量工作。
所以在实测GPS控制网之前,进行踏勘选点时,除了遵循《全球定位系统(GPS)测量规范》外,还应注意以下几点:1、GPS点位应该离公路稍远一些。
、2、GPS点位应远离枝叶茂盛的大树。
、3、GPS点位应尽量远离对无线电信号有反射作用的建筑物及具有发射无线电信号功能的电视台、电台等。
4、实测GPS网时,有时不得已要进行偏心观测。
若有偏心观测时,应该尽量减少偏心元素的测定误差,同时偏心距不应大于100m为宜。
4 确定合理的网形结构1、确定同步图形同步图形的形状是由GPS接收机的台数决定的。
例如:3台接收机一般采用同步三角形;4台接收机一般既可以采用同步四边形也可以采用同步中点三边形;4台以上接收机所采用的同步图形就更灵活。
2、同步图形连接扩展方式同步图形连接扩展方式一般有点连接方式、边连接方式和网连接方式。
不同的连接扩展方式有各自不同的特点。
(1)、点连接式GPS网若相邻同步环之间仅有一个公共点相连接构成的GPS网则称之为点连接式GPS 网,简称点连式GPS网(如图1(a)所示)。
以这种方式构成的GPS网,没有(或仅有一个)异步闭合环,网形强度比较薄弱,发现粗差的能力较弱;但在同样网点数下,同步图形个数最少,而且它具有最少观测时段数,工作量较小,获得成果快,若对控制点精度要求不高,观测时选取有利的观测时间,采用点连接GPS网无疑是一种经济快速的布网方式。
第四节 GPS控制网的优化设计

第四节 GPS控制网的优化设计
二、GPS网基准的优化设计 1.GPS网位置基准的优化设计 对位置基准的优化可以采用如下方案: 1) 若网中点具有较准确的国家坐标系或地方坐标系坐标,可以 通过它们所属坐标系与WGS–84坐标系的转换参数求得该点的W GS–84系坐标,把它作为GPS网的固定位置基准。 2) 若网中某点是Doppler点或SLR站,由于其定位精度较GPS伪 距单点定位高得多,可将其联至GPS网中作为一点或多点基准。 3) 若网中无任何其他类已知起算数据时,可将网中一点多次GP S观测的伪距坐标作为网的位置基准。 2.GPS网的尺度基准优化设计 优化有以下几种方案:
第四节 GPS控制网的优化设计
2.GPS网优化设计的内容 GPS网不同于经典控制网的所有特点,决定了GPS网的优化设计 不于经典控制网的优化设计。从GPS测量的特点分析可以看出,GPS 网需要一个点的坐标为定位基准,而此点的精度高低直接影响到网 中各基线向量的精度和网的最终精度。同时由于GPS网的尺度含有 系统误差以及与地面网的尺度匹配问题,所以有必要提供精度较高 的外部尺度基准。由于GPS网的精度与网的几何图形结构无关,且 与观测权相关甚小,而影响精度的主要方面是网中各点发出基线的 数目及基线的权阵。 GPS网的优化设计主要归结为两类内容的设计: (1)GPS网基准的优化设计。 (2)GPS网图形结构强度的优化设计,包括:网的精度设计,网 的抗粗差能力的可靠性设计,网发现系统差能力的强度设计。
在网中选一条长基线,对该基线 尽可能多地长时间、多次观测, 最后取多次观测段所得的基线的 平均值,以其边长作为网的尺度 基准。
第四节 GPS控制网的优化设计
三、GPS网的精度设计
1)A最优性标准: f=Trace(QX)=λ1+λ2 +…+λt →min Trace表示迹, λ1,λ2, …, λt为QX的非零特征值. 2)D最优性标准: f=Det(QX)=λ1· λ2 ·…·λt →min Det表示行列式之值。 3)E最优性标准: f=λmax →min λmax为QX的最大特征值 4)C最优性标准: f=λmax/λmin →min f=Trace(QX)≤C (7–8)
GPS控制网质量控制分析

C
l 0
5
1 20 /1 0 00
D
1 0
l 0
l 0 口口 /8 0
E
1 0
2 0Leabharlann l4 0 0 / 50 一
级
1 0
2 0
120 0 / 00
避稍 髓上 氍 B糍
静遁# 薯
英
二 级
1 5
2 0
1 00 /10 0
、
( ) 编 写 技 术 设 计 书 三 根 据 测 量 任 务需 要 , 收 集测 区范 围既 有 的测 量 资 料 、 有关 地 形 图、 交通 图 、测 区 总 体 建 设 规 划 和 近 期 发 展规 划 等 资 料 , 而 后进 行资 料 分 析研 究 ,必 要 时进 行 实 地 勘 察 ,按 照 最 优 化 原 则 进 行 室 内 图 上 设 计 。同 时 ,根 据控 制 网的 精 度设 计要 求 编 写 技 术 设 计 书 ,其 内容 主 要 包 括 : 项 目来 源 : 介绍 项 目的 来 源 、性 质 。
测 区 概 况 : 介 绍 测 区 的 地 理 位 置 、 气 候 、人 文 、经 济 发展 状 况 、交 通 条件 、通
讯 条件 等 。 工 程 概 况 : 介 绍 工 程 目 的 、 作 用 、 要
CH 8 6 0l 95
中华 人 民共 和 国测 绘 行 业标 准 测 绘 产 品 检 查 验 收 规 定 CH l 0 9 02 5 二 、专 业 技 术 设 计 ( )等级 划分 。 一 根据 全球 定位 系统 ( G P S)测 量规 范 》和 全球 定位 系统 城 市测量 技 术规 程 中规 定的城 市各级 G PS控制 网相邻 点问平 均距 离 ,要求 在城 市 G PS 控 制 网布设 时 , 其 相邻 点 问平 均 距离 应 符 合表 l要 求 。 同 时 , 允 许 相 邻 点 的 最 小 距 离 可 为 平 均 距 离 的 l /3 ~l/2, 最 大 距 离 可 为 平 均 距 离 的 2~3倍 。考 虑 到南方 地 区丘陵 山地 地形 复杂 ,因此 ,在 南方地 区布设 C级 GPS控 制 网 时 ,其 平 均边 长 限 制 可根 据 实 际情 况 适 当放 宽 到 2 0~2 km , 同 时 规 定 边 长 超 5 过 2 km 的 同步环 应增测一 个时段 ,以 确 5 保 GPS 测 量 数 据 的 质 量 。 表 l 城市各级 GP : S控制网 平均边长 ( 位 :km ) 单
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为了使获得的可能发现的粗差最小值可信, 一般取 !
= 0. 001, 1- ∀= 0. 80, 相应的 #0 = 2. 81。
2. 2. 3 GPS 网的外部可靠性
所谓外部可靠性是指每个可识别粗差或者模型误差
的临界值对平差未知参数及其参数函数的影响。一个基
线向量在 3个坐标分量上的外可靠性指标为:
#0X = #0
k= X
设显著性水平为 !, 检验功效为 1- ∀, 由 !和 1- ∀确
定的非中心参数为 #0, 则对于第 i 个基线向量, 其 3个坐 标分量可发现的最小模型误差和粗差为:
= X i
#0 m X i r Xi
= Y i
#0 m Yi r Yi
( 11)
= பைடு நூலகம் i
#0 m Z i r Zi
式中 m X ,i m ,Yi m 为 Zi 该基线向量 3个坐标分量的观测中
X^ = (AT PA ) - 1AT PL
DXX =
Q2
0 XX
-
2 0
(AT PA
)-1
( 2)
未知参数的方差阵 DXX 或协因数阵 QXX称为控制网的
精度矩阵。
对于 GPS 测量, 正如前所述, 其精度与网点的坐标无 关, 与观测时间无明显的相关性 (整周模糊度一旦确定
后 ), GPS网平差的法方程只与点间的基线数目有关, 且 基线向量的 3个分量之间又是相关的, 因此很难从数学角 度和实际应用出发建立使未知数的协因数阵逼进理想的
可靠性的研究有两大任务: 其一是指从理论上研究 平差系统发现、区分不同模型误差的能力以及不可发现、
不可区分的模型误差对平差结果的影响; 其二是从实际 上寻求在平差过程中自动发现和区分模型误差以及确定
模型误差位置的方法。 GPS网的可靠性取决于网的图形
结构和基线向量之权阵, 而不是取决于实际的观测, 因此 在网的设计阶段应考虑网的可靠性, 确保检测到尽可能 小的粗差和减小不可能发现的模型误差对待估未知参数
准则矩阵。所以目前较为可行的方法是给出坐标协因数
阵的某些纯量标准函数。
优化设计中常用的纯量精度标准, 根据其由 QXX构成 函数的形式不同分为 A, D, E, F 4 类不同的最优纯量标准 函数。对于 GPS基线向量 X ij, Yij, Zij, 其协因数矩阵 为:
Q XX QX Y QX Z
Q = QYX QYY QYZ
,Yi r
仅与
Zi
R
i
和
P
i
有关,
而与观
测值本身的大小无关, 因此可以根据平差图形和观测值
的权阵计算出来。由 ( 12)式可发现的粗差最小值与观测
精度成正比, 与 r 成反比。观测精度越高则可能发现的
粗差越小, 即粗差越容易发现。 r 愈小, 则可能发现的粗
差越大, 即粗差越难发现。我们总是希望探测粗差的能 力愈强愈好, 即在一定的显著水平 !和检验功效 1- ∀下,
础上, 对 GPS 测量控制网优化设计的质量指标进行了探讨。
关键词: GPS控制网; 质量指标; 优化设计
中图分类号: P228. 4
文献标识码: B
文章编号: 1672- 5867 ( 2008 ) 04- 0132 - 03
D iscussion on Quality Specification of Optim ized Design of GPS Control N etwork
误差。单个基线向量能发现的最小粗差和模型误差为:
13 4
测绘与空间地理信息
2008 年
= bi
+ 2
Xi
+ 2
Yi
2 Zi
( 12)
它是一种平均意义的定义, 即假设某一基线向量在
空间各个方向上可发现的最小粗差都相等, 因此单个基 线向量可发现的最小粗差的下界域被定义为球形域。
由上式知道,
r
,X i r
第 31卷 第 4期 2008年 8月
测绘与空间地理信息
GEOMAT ICS & SPAT IAL IN FORMAT ION TECHN OLOGY
V o .l 31, N o. 4 A ug. , 2008
GPS控制网优化设计质量指标探讨
汤均博
(淮海工学院, 江苏 连云港 222001)
摘 要: GPS 测量控制网的优化设计工作是 GPS控制网 质量的重 要保证, 本文在分 析 GPS 测量 控制网特 点的基
( 3)
Q ZX Q ZY Q ZZ 实际代表的是相对点位精度, 它一般在接收机接收
到信号、解算出基线向量后一并给出。影响它的主要因
素是接收时间的长短以及卫星的 GDOP因子, 由基线向量 协因数阵和观测方程可以推 导出 GPS 网 整体点位精度 QX, 从而考察 GPS变形监测网的整体质量指标。
2. 2 可靠性指标
拟对角阵。设 P i 为基线向量 的权阵的第 i个 三阶主子 块, Ri 为该基线向量的 3个坐标分量的多余观测主子块。
记为:
Z
! r Xi =
(P XK ) i (RK X ) i
k= X
Z
! r = Yi
( P YK ) i ( RK Y ) i
k= X
( 10)
Z
! r Zi =
(P ZK ) i (RK Z ) i
PXY - 1 rX
#0Y = #0
PYY - 1 rY
( 15)
#0Z = #0
PZZ- 1 rZ
式中 P X X, P Y Y, P Z Z分别是该基线向量权阵中的对角线
元素, r X , r Y, r Z按 ( 15)式计算, 同内可靠性一样, 定义
一条基线向量的外可靠性指标为:
#0b =
#2 0X
TANG Jun- bo ( H uaihai In stitute of T echno logy, L ianyun gang 222001, Ch ina)
Abstrac t: It is a very importantw ork to design optim iza tion GPS contro l netwo rk for ensuring the qua lity of GPS con tro l survey. In this paper, based on the ana ly sis of the charac ters of GPS control ne tw ork, som e qua lity spec ification of GPS control ne tw ork w as discussed and g iv en. K ey word s: GP S contro l netwo rk; qua lity spec ification; optim ized design
差的能力。GPS网的内可靠性亦称为观测的可控性, 是指 在一定的显著水平和检验功效下, 用数理统计的方法所 能探测出的在基线向量中存在的最小粗差。
由于 GPS网的观测值是相互独立的基线向量, 即各
个基线向量之间是互不相关的, 但同一基线向量的 3个观
测分量之间是相关的。因而 GPS网观测量的权阵是一个
+
#2 0Y
+
#2 0Z
它也是平均意义下的指标。
( 16)
当要计算第 i条基线向量可以识别的最小粗差对第 j ( j∀ 1)个 GPS 网点参数估计的影响时, 可以按照下式计 算:
= # ^ Q 0X j
0bi 0 X j
= # ^ Q 0Yj
0bi 0 X j
( 17)
= # ^ Q 0Zj
0bi 0 X j
, n )T,
V =R
( 8)
R 对角线上的元素 rij (多余观测分量 )为 Li 的模型误
差 i 对本身改正数 Vi 的影响系数, 非对角线元素 rij表示
Lj 的模型误差 i 对 L i 的改正数 Vi 的影响系数。
对于 GPS观测值来说, 其每一条基线向量均由 3 个
坐标分量组成。第 i 个基线向量的多余观测分量的主子
D(L ) =
2 0
Q
=
P2 - 1
0
( 1)式中 L 为 n 维观测向量, X 为 t维未知参数向量 (通常
选择控制网中待定点的高程和坐标作为未知参数 ), A 为
系数矩阵或设计矩阵, Q- 1 = P 为权阵,
2 0
为单位权方差,
D (L )和 E (L )分别是 L 的方差和数学期望。
根据最小二乘原理, 上式的平差结果为:
DX X =
20Q =
2 0
(
AT
PA
)
-
1
代入上式得:
V = (AQ AT P + I)L = QVVPL = RL
( 6)
可靠性矩阵:
r11 r12
r1n
R = QVV p = r21 r22
r2n
( 7)
rn1 rn2 若观测值有一模型误差或粗差 则 对观测值残差的影响为:
rnn = ( 1, 2,
块为 R i, 那么 Ri 阵的 3个主对角线元素就是该基线向量
的
3个坐标分量的多余观测分量,
分别记为
r
x
,
i
r
y
,
i
r ,zi
则定义:
rij =
1 3
(
r
xi
+
r yi +
r zi )
( 9)
为第 i个基线向量的多余观测分量。
2. 2. 2 GPS网的内部可靠性