全站仪测量高程
全站仪高程测量法

全站仪高程测量法在工程的施工过程中,常常涉及到高程测量。
传统的测量方法是水准测量、三角高程测量。
两种方法虽然各有特色,但都存在着不足。
水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。
在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。
但精度较低,且每次测量都得量取仪器高,棱镜高。
麻烦而且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。
经过长期摸索,总结出一种新的方法进行三角高程测量。
这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。
使三角高程测量精度进一步提高,施测速度更快。
一、三角高程测量的传统方法如图一所示,设A,B为地面上高度不同的两点。
已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA+HAB得到B点的高程HB。
图中:D为A、B两点间的水平距离а为在A点观测B点时的垂直角i为测站点的仪器高,t为棱镜高HA为A点高程,HB为B点高程。
图一V为全站仪望远镜和棱镜之间的高差(V=Dtan а)首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则hAB=V+i-t故HB=HA+Dtan а+i-t (1)这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A,B两点间的距离很短时,才比较准确。
当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。
这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。
全站仪如何测量高程
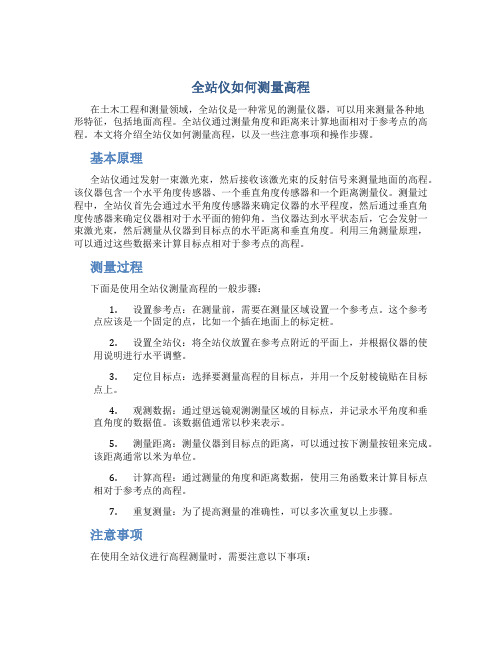
全站仪如何测量高程在土木工程和测量领域,全站仪是一种常见的测量仪器,可以用来测量各种地形特征,包括地面高程。
全站仪通过测量角度和距离来计算地面相对于参考点的高程。
本文将介绍全站仪如何测量高程,以及一些注意事项和操作步骤。
基本原理全站仪通过发射一束激光束,然后接收该激光束的反射信号来测量地面的高程。
该仪器包含一个水平角度传感器、一个垂直角度传感器和一个距离测量仪。
测量过程中,全站仪首先会通过水平角度传感器来确定仪器的水平程度,然后通过垂直角度传感器来确定仪器相对于水平面的俯仰角。
当仪器达到水平状态后,它会发射一束激光束,然后测量从仪器到目标点的水平距离和垂直角度。
利用三角测量原理,可以通过这些数据来计算目标点相对于参考点的高程。
测量过程下面是使用全站仪测量高程的一般步骤:1.设置参考点:在测量前,需要在测量区域设置一个参考点。
这个参考点应该是一个固定的点,比如一个插在地面上的标定桩。
2.设置全站仪:将全站仪放置在参考点附近的平面上,并根据仪器的使用说明进行水平调整。
3.定位目标点:选择要测量高程的目标点,并用一个反射棱镜贴在目标点上。
4.观测数据:通过望远镜观测测量区域的目标点,并记录水平角度和垂直角度的数据值。
该数据值通常以秒来表示。
5.测量距离:测量仪器到目标点的距离,可以通过按下测量按钮来完成。
该距离通常以米为单位。
6.计算高程:通过测量的角度和距离数据,使用三角函数来计算目标点相对于参考点的高程。
7.重复测量:为了提高测量的准确性,可以多次重复以上步骤。
注意事项在使用全站仪进行高程测量时,需要注意以下事项:•做好现场准备:在测量前,要确保测量区域没有遮挡物,保持良好的观测条件。
•注意安全:在测量时,要注意周围的安全情况,尤其是在交通繁忙的区域进行测量时。
•准确观测:在观测时,要保持仪器的水平状态,并使用准确的目标点反射棱镜。
•数据处理:在计算数据时,要仔细检查测量角度和距离的数据,确保其准确性。
[整理版]谈全站仪的高程测量精度
![[整理版]谈全站仪的高程测量精度](https://img.taocdn.com/s3/m/b7a625c2b8f3f90f76c66137ee06eff9aef849ec.png)
谈全站仪的高程测量精度
本人在从事工程技术管理的工作中,经常听到有测量工程师抱怨说某某全站仪不好用,测高程测不准。
于是我问他:测距离准不准?得到回答是,测距离没问题!于是我就奇怪了,为什么测距离准,测高程不准呢?全站仪工作时测得夹角a和距离L,如下图:
s H
L
a
H=L*sina
S=L*cosa
既然S准确,相应的H也应该准确,因为他们的计算变量都是一样的。
但经过本人实际操作,全站仪测高程精度确实比较差。
到底是什么原因使得同样的参数,计算出来的结果一个精确,另一个却不精确呢?进过详细分析,本人发现其实并不是仪器的问题,而是误差给大家带来的麻烦:
90sinx
cosx Y
Y1
Y2
上图是正弦曲线和余弦曲线示意图,我们可以发现在全站仪镜头水平x=0°—竖直x=90°期间y值的变化,当我们在接近0°附近测量时f(x)=cosx相对于g(x)=sinx对x的增量来说不敏感,也就是说,当我们在仪器测量a角时,一个增量Δa引起的S的变化比H的变化小的多,而实际操作中,各位测量工程师也会发现,由于仪器的构造限制,很少有机会在测量的时候使全站仪仰俯超过45°,而真正当仰俯角超过45°,(例如在近距离测量盖梁或者墩顶高程)时,全站仪的高程测量精度并不比水平坐标的测量精度低。
例如:sin10.1-sin10=0.00171855,cos10.1-cos10=-0.0003045,这表明在角度误差0.1°的情况下,瞄准接近100米的目标,高程会差17cm,而距离只差3cm,这就是为什么大家都抱怨全站仪测高程不精确的原因。
如何利用全站仪进行海拔测量与高程标定

如何利用全站仪进行海拔测量与高程标定全站仪是一种常用的测量仪器,它可以用来进行海拔测量和高程标定。
在土木工程、测绘学和建筑学等领域,海拔测量和高程标定是非常重要的工作。
本文将介绍如何利用全站仪进行这两项测量工作,并探讨其原理和注意事项。
一、海拔测量海拔测量指的是确定某一点相对于平均海平面的高度。
利用全站仪进行海拔测量的基本原理是通过测量视线的垂直角和水平角来计算目标点与观测点之间的距离和高度差。
下面将介绍具体的操作步骤:1. 准备工作:将全站仪放置在稳固的三脚架上,并通过调整水平仪使其水平。
2. 设置测量模式:在全站仪上选择合适的测量模式,通常会选择“单次测距”模式。
3. 设置目标点:通过望远镜将目标点对准准星杆上的交叉线,在全站仪上的显示屏上记录下距离和高度角。
4. 数据处理:利用全站仪的测量功能,将记录下来的数据进行处理,计算出目标点的高度差。
需要注意的是,在进行海拔测量时,要注意观测条件的选择。
避免测量过程中有高楼、大树、山峰等遮挡物,以免影响测量的准确性。
二、高程标定高程标定是指将某一点的高程值确定为零点,并以此为基准测定其他点的高程值。
利用全站仪进行高程标定的原理是通过在已知高程点上进行标定,然后测量其他点相对于已知点的高程差。
以下是具体操作步骤:1. 选择已知高程点:在要测量的地区选择一个或多个已知高程点,可以是已知控制点或其他可信赖的高程基准点。
2. 准备工作:将全站仪放置在稳固的三脚架上,并进行水平调整。
3. 设置基准点:将全站仪对准已知高程点,并记录下水平角和垂直角。
4. 测量其他点:依次将全站仪对准其他待测点,并记录下相应的水平角和垂直角。
5. 计算高程差:通过测量数据计算出各个点相对于基准点的高程差。
值得注意的是,在进行高程标定时,要尽可能选择离已知点较近的测量点,并且需确保测量的角度较小,以提高测量精度。
总结起来,利用全站仪进行海拔测量和高程标定需要经过一系列操作步骤,并需要掌握相关的原理和注意事项。
全站仪测量高程到底有几种方法

全站仪测量高程到底有几种方法。
方法一:经典方法,全站仪在已知坐标(含高程)点上设站;方法二:后方交会,全站仪在任意点上设站;方法三:对边测量,全站仪测两点高差。
下面对三种方法进行阐述:方法一:经典方法先说方法一。
说这个方法是经典方法,是因为:1.其测量原理我们在学习经纬仪视距测量时就学习过,每种测量教材中都有;2.测量教材中有关全站仪高程测量原理,都按此原理进行阐述;3.全站仪高程测量的相关设置,都按此原理进行的。
到底什么测量原理呢,我们来回顾一下,看下图:我们从(1)式中可以发现,全站仪一旦设站完成,测站高程和仪器高度均为定值,若测量过程中不改变棱镜高度,则除了Ssina(即实测参数)外,等式右侧其它各参数之和均为恒等值,由此我们可以得出:全站仪一旦设定,同时不再改变棱镜高度的话,全站仪对各点的测量高差,其实质是每个三角高差dZ的差值这个结论我们先记住,它将是后面方法二和方法三的理论基础。
方法二:后方交会说实话,我也不知道叫“后方交会”是否准确,因为这个名字一般是指:在全站仪平面测量时,全站仪自由设站,通过测量并输入测站外两个已知点的平面坐标,从而完成设站的工作。
而这里是指全站仪在高程测量前,全站仪自由设站,通过测量测站外一个已知高程点,再通过全站仪相关的设置,从而完成全站仪高程测量设站的工作。
我们还是继续对照着这张老图进行分析:方法三:对边测量方法三的测量方法是一个纯粹的高差测量,操作也相当简单:全站仪架设在任意位置,不做任何高程测量的设置(即测站高程、仪器高、棱镜高均使用仪器内存值),分别对两个点测量其三角高差dZ(要保证棱镜高度不变),两者之差即为两点之高差,跟水准测量的后视减前视相反,这里应该是前视减后视。
其测量原理,在方法一中已经验证,在此不再赘述。
各种方法的适用情况:方法都出来了,都有测量原理,都是可行的,如果硬要说哪种方法好,本身这个问题就是个伪问题,因为每种方法各有优势,如果不结合实际情况,便不能确定到底哪种方法要好。
高程测设的方法
高程测设的方法
高程测量是指对于一个地理位置的高度或海拔高度进行测量和计算的过程。
常见的高程测设方法有以下几种:
1. 全站仪法:全站仪法是一种利用全站仪进行高程测量和校正的方法。
通过在已知点上测量高差,再利用高精度全站仪进行校正,可以获得较为准确的高程数据。
2. 水准法:水准法是一种传统的高程测量方法,其原理是利用水平面的稳定性来测量高差。
通过在起点和终点同时设置水准仪,并使用水准棒对水准线的高差进行读数,然后进行计算,即可得到高程值。
3. GPS测量法:GPS测量法是一种基于卫星导航系统进行高程测量的方法。
通过在起点和终点安装GPS接收器,并收集同步信号,可以测量两点之间的距离,然后结合大地水准面模型进行计算,即可获得高程数据。
4. 遥感测量法:遥感测量法是一种利用卫星、飞机等遥感技术进行高程测量的方法。
通过获取影像数据,并进行数字高程模型的构建和解译,可以得到高程数据。
综上所述,高程测量的方法有多种,不同的方法适用于不同的场合和需要。
在实际工作中,应根据具体情况选择合适的高程测量方法,并结合其他地理信息数据进行综合分析和应用。
无量高全站仪三角高程测量
随着全站仪在工程测量中的普及,使用既可任意置站,又可减少误差来源,同时还无需每次量取仪器高及棱镜高度的棱镜跟踪杆配合全站仪测量高程方法,已愈发受到广大测量人员青睐。
通过已有工程实例证明,无量高全站仪三角高程测量法可使测量精度进一步提高、施测速度更快,特别适合于复杂环境下工程的应用。
1 无量高全站仪三角高程测量法1.1 测点高程H测高法(1)公式推导图1为传统三角高程测量示意。
设HB为B点高程,已知;H A为A点高程,未知;现通过全站仪测定其他待测点的标高图1中,D为A、B两点间的水平距离,即高斯投影平面上两点的距离;i为测站点的仪器高。
图1 传统三角高程测量示意H A=H B-D tanα-i+t式中:D tanα即V值可用仪器直接测出,i、t均未知,但因仪器置好后,i 值将随之不变,同时选取棱镜跟踪杆作为反射棱镜,棱镜高度值t也将不变。
故待测点的高程为:HA+i-t=H B-D tanα=H0。
H A+i-t在任意测站上固定不变,且可以计算出其测站点高程H0。
故有H求= H0+D'tanα'+i-t。
式中:H求为待测点高程;D'为测站点到待测点的水平距离;α'为测站点到待测点的观测垂直角。
当i=0、t=0时,H求= H0+D'tanα'。
(2)操作过程1)选择与已知高程点通视的位置将仪器任意置点。
2)测出V值,计算出H0。
3)重新设定仪器测站点高程为H0,且设置仪器高及棱镜高为0。
4)照准待测点,测出其高程。
1.2 借高三维Z坐标测高法(1)公式推导借高三维Z坐标值测高法测量如图2所示,B=BM为后视点B的高程代号。
假设B点的高程H;已知,C点的高程HC未知,A点为任意置站点,通过全站仪测定C点的高程HC。
图2 借高三维Z坐标值测高法测量示意由Z坐标测量原理可知:Z B=Z A+D tanα+i-t式中:D tanα即V值可以用仪器直接测出,测出V值后将仪器中仪高值i改设为(t-D tanα)值、将测站点ZA坐标设置为基准点高点H B。
全站仪三角高程测量流程
全站仪三角高程测量流程一、引言全站仪是一种高精度的测量仪器,广泛应用于土木工程、建筑工程和测量工程等领域。
在实际测量中,三角高程测量是全站仪的常用功能之一。
本文将介绍全站仪三角高程测量的流程,包括准备工作、测量操作和数据处理等内容。
二、准备工作1. 确定测量范围:根据实际需要,确定测量的区域范围,并进行必要的勘测和标志设置。
2. 设置全站仪:将全站仪安装在稳固的三脚架上,并进行水平调平和垂直调准。
3. 设置参考点:选择一个稳定的点作为基准点,并进行标志和记录。
三、测量操作1. 设置测站:选择一个适合的测站点,将全站仪准确对准目标点。
2. 观测目标点:使用全站仪的望远镜对目标点进行观测,并记录观测数据,包括水平角和垂直角。
3. 移至下一个测站点:根据需要,移动全站仪至下一个测站点,并重复步骤2,将所有目标点都进行观测。
四、数据处理1. 计算水平角:根据观测数据,使用全站仪的内置程序或专业测量软件,计算各个目标点的水平角。
2. 计算垂直角:根据观测数据,计算各个目标点的垂直角。
3. 计算高程差:根据测站点的基准点和各个目标点的观测数据,计算各个目标点的高程差。
4. 计算三角高程:根据测站点的高程和各个目标点的高程差,计算各个目标点的三角高程。
5. 数据校正:对测量数据进行校正,包括仪器误差的校正和大气条件的校正等。
6. 数据输出:将测量结果输出为报告或数据文件,以便后续的分析和应用。
五、注意事项1. 在测量过程中,要注意仪器的精度和稳定性,保证测量结果的准确性。
2. 测量时要避免遮挡物,确保目标点的清晰可见。
3. 在计算过程中,要仔细检查和核对数据,避免计算错误。
4. 在数据处理过程中,要注意单位的一致性,避免单位转换带来的误差。
5. 在数据输出时,要按照规范的格式和要求进行,确保结果的可读性和可用性。
六、总结全站仪三角高程测量是一种常用的测量方法,通过全站仪的精确观测和数据处理,可以获得目标点的高程信息。
全站仪三角高程测量方法
全站仪三角高程测量方法
首先,确定测量点和参考点的位置。
在进行高程测量之前,需要确定好测量点
和参考点的位置。
测量点是需要测量高程的点,而参考点是已知高程的点。
在确定位置时,需要考虑到地形的起伏和可见性,以确保测量的准确性和可靠性。
其次,设置全站仪。
在确定好测量点和参考点的位置后,需要设置全站仪。
首先,将全站仪放置在水平地面上,并通过调节仪器的水平仪使其水平。
然后,通过调节仪器的望远镜使其指向参考点,并记录下参考点的水平角和垂直角。
接着,测量目标点的水平角和垂直角。
将全站仪指向测量点,并记录下测量点
的水平角和垂直角。
在记录角度时,需要确保仪器的稳定和准确,以避免误差的产生。
然后,计算高程。
通过测量得到的水平角和垂直角,可以利用三角函数的关系
计算出测量点的高程。
在计算高程时,需要考虑到地球的曲率和大地水准面的影响,以确保计算结果的准确性。
最后,校核和修正。
在完成高程测量后,需要对测量结果进行校核和修正。
校
核的目的是检验测量结果的准确性,而修正则是对可能存在的误差进行修正,以提高测量结果的可靠性和准确性。
通过以上的全站仪三角高程测量方法,可以实现对地面高程的准确测量。
在实
际的测量工作中,需要严格按照方法进行操作,并注意仪器的校准和调整,以确保测量结果的准确性和可靠性。
同时,需要根据实际情况对测量结果进行校核和修正,以提高测量的准确性和可靠性。
全站仪测高程有几种方法
全站仪测高程有几种方法引言全站仪是现代测量工程中常用的仪器之一,用于测量地面点的坐标、角度和高程信息。
在工程测量中,测量高程是一项常见而重要的任务,而全站仪提供了多种测高程的方法。
本文将介绍全站仪测量高程的三种常用方法,分别是三角测量法、平直视线法和间接测量法,并对每种方法的原理和适用场景进行详细说明。
方法一:三角测量法三角测量法是全站仪测量高程中最常见和广泛应用的方法之一。
该方法基于三角形的几何性质,通过测量三角形内的角度和两边长度来计算目标点的高程信息。
三角测量法的步骤如下:1.设置三角形的一个顶点A为已知点,测量其坐标和高程信息;2.在目标点B处设置一个反射镜棱镜;3.将全站仪对准顶点A,并通过仪器测量AB之间的水平角和竖直角;4.测量仪器与反射镜间的斜距;5.根据测量结果和三角形的几何关系,计算目标点的高程。
三角测量法适用于地面点位差异较大的情况,能够快速获取目标点的高程信息,并且具有较高的测量精度。
方法二:平直视线法平直视线法是一种基于水平测量的全站仪测高程方法。
该方法利用全站仪的水平测距和测角功能,通过测量目标点处的水平距离和仰角来计算高程信息。
平直视线法的流程如下:1.在已知点A处设置全站仪,并记录其坐标和高程信息;2.在目标点B处设置一个反射镜棱镜;3.通过全站仪测量AB之间的水平距离,并同时记录该点的水平角和仰角;4.根据测量结果和仪器高度差,计算目标点的高程。
平直视线法适用于地面较为平坦的场景,其原理简单易懂,测量速度快,但在地形变化较大的环境中,其测量精度可能会有限制。
方法三:间接测量法除了上述两种直接测量高程的方法外,全站仪还可以通过间接测量法来获取高程信息。
间接测量法是基于测量目标点与参考点之间的距离差和高差来计算目标点高程的方法。
间接测量法可以分为两种具体方法:1.三角高差法:在目标点与参考点之间设置一个或多个测量点,通过测量这些点之间的高差和水平距离来计算目标点的高程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最简单的办法:随意设站,当然要整平好。
如果不需要平面位置,连后视对准也不需要了。
看任意一个已知高程的点,比如点A,它的高程为3.00米(这时你没有输入仪高和棱镜高,可能仪器上有之前的仪高输入和棱镜高,先不要管仪高,棱镜高在棱镜杆上有尺度,可以直接读取,输入棱镜高;也可以不修改棱镜高,但后面就不能随意拔长棱镜杆),好了,对准A点上的棱镜中心,测量,会显示一个不准确的坐标和高程,坐标不要去管它,因为不需要平面位置。
这时显示的A点的高程为一不准确值,比如为4.05米,也可能为其他值,总之,用这个值减去A点实际高程,比如4.05-3.00=1.05米,好了,现在把测站的高程,也就是Z 值减去1.05米,重新输入。
对准A点上的棱镜中心,测量,这时显示的就是A点的准确高程3.00米。
再测任意其他点,测出的就是较为准确的高程。
这个误差就是仪器的水准测量误差了,还减少了钢尺量测仪高的误差。
11。